Adams中各类命名规则及文件的作用的归纳
ADAMS 菜单说明
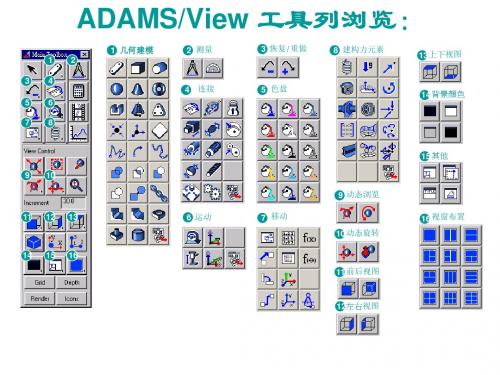
图5-7 尖底凸轮机构
• 凸底凸轮机构:物体的接触碰撞固定于曲 线之间,因此,碰撞点不会离开曲线。
移除两个DOF 构成元件: 两个物件;两条曲线。 一般应用于凸轮对凸轮的系统。如图5-8所示。
图5-8 凸底凸轮机构
6.1.2 调用施加力工 具 • 调用施加力的工 具和命令有两种 方法: 1)利用主工 具箱施加力工具 集,如图6-1a 所 示,选择施加各 种力的工具图标。 2)在Build菜 单中,选择 Forces命令,显 示施加力对话框, 如图6-1b所示。
图标
视图方 向
3.10.2 单位设置 • ADAMS/View有6个基本的度量单位:长度、 质量、力、时间、角度、频率。另外程序中 预设了4个度量单位系统,如表3-3所示。
表3-3ADAMS/View预设的单位系统
单位系统 1 2 3 4 MMKS MKS CGS IPS 长度 毫米 米 厘米 英寸 质量 公斤 公斤 克 斯 力 牛顿 牛顿 达因 磅力 时间 秒 秒 秒 秒 角度 频率 度 度 度 度 弧度/秒 弧度/秒 弧度/秒 弧度/秒
约束3个移动自由度
约束2个旋转1个移动自由度
约束1个旋转3个移动自由度
续表5-1常用的运动副
7.螺旋副 8.固定副 9.万向副
约束1个自由度 10.万向副
约束3个旋转3个移动自由度 11.齿轮副
约束1个旋转3个移动自由度
12.关联副
约束1个旋转3个移动自由度
5.4 指定约束
• ADANMS/View提供了5种常用的指定约束,如表5-2 所示。可以应用这些约束工具,组成不同的约束。
几何建
模工具
几何建模 工具集
表格编辑器
浮动对话框
设置栏
adams_cmd
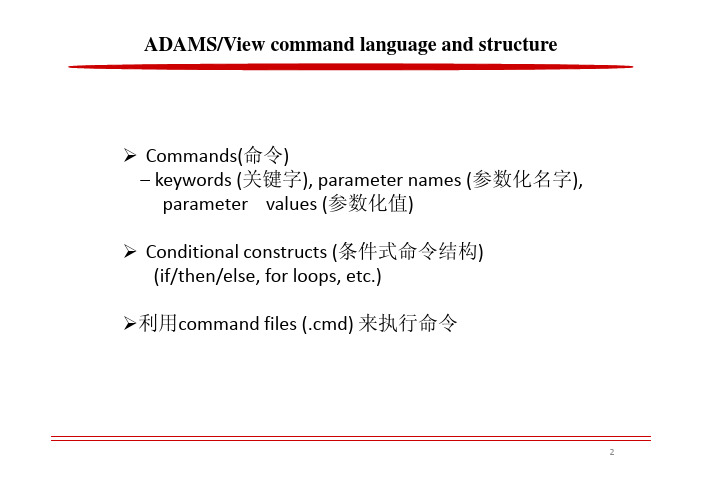
ADAMS/View command language and structure¾Commands(命令)–keywords (关键字), parameter names (参数化名字), parameter values (参数化值)C diti l t t¾Conditional constructs (条件式命令结构)(if/then/else, for loops, etc.)¾利用command files (.cmd) 来执行命令关于Adams/View 命令输入值的语法规则.log文件不知道的命令可由此文件来获得ADAMS/View command 的三种类型ADAMS/View command 中的conditional constructs ¾BREAK¾CONTINUE¾IF/ELSEIF/ELSE/END¾FOR/END/¾WHILE/END¾RETURNConditional constructs -BreakBREAK运用BREAK 命令可以立刻停止执行循环里的命令,从FOR或WHILE循环中跳出来。
当Adams/View在一个循环里遇到一个BREAK命令时,它就会立马退出来/在个循环里遇到个命令时它就会立马退出来而不执行循环中剩余的命令。
The BREAK command affects only the innermost FOR or WHILE loop. BREAK命令在只影响最内部的FOR or 循环。
WHILE循环Examplevariable variable_name ip integer_value0create variable name=ip integer value=0while condition=(ip < 5)variable modify variable_name=ip integer_value=(eval(ip+1))if condition(eval(_XISTS(MAR//ip)))condition=(eval(DB EXISTS ("MAR"//ip)))breakend_((p))marker create marker_name=(eval("MAR"//ip)) &location=(eval(ip‐1)),0,0endvariable delete variable_name=ipConditional constructs -CONTINUECONTINUE命令用来跳过最里层的FOr或者WHILE循环中的命令,继续执行循利用FO循环中的命令继续执行循环中的下一个新的迭代。
ADAMS用户子程序资料整理

ADAMS用户子程序资料整理1.子程序分类及其各自功能->第9章ADAMS用户子程序-(陈立平)机械系统动力学分析及ADAMS应用.doc2.子程序调用注意事项->MDADAMSR3用户子程序使用相关问题.doc程序编写时首先需要定义两个头文件uerPortName.h和utilCcallable.h,要使得头文件uerPortName.h顺利运行还需要定义编译标记,根据计算机所应用的操作系统平台不同和软件的版本不同编译标记也不同,对应关系见表1。
表1平台与编译标记对应关系平台IRI某SunHP定义变量#defineport2gi#defineport2un编译标记-Port2gi-Port2un-Port2cray-Port2pcnt-Port2ibmr#defineport2hp700-Port2hp700Cray#defineport2crayWindow#defineport2pcntIBM-RS义形式为:#defineport2pcnt//定义编译标记#include\//定义头文件#include\ #defineport2ibmr由表1可见,在Window系统中编译标记一般定义为Dport2pcnt。
综上,程序开头定3.9.1.1用户子程序的种类根据用户子程序的功能,可以将它们分为三类:(1)DriverSubroutine——驱动子程序(2)EvaluationSubroutine——计算子程序(3)Retartubroutine——重启子程序1.驱动子程序(DriverSubroutine)驱动子程序(DriverSubroutine)--CONSUB--用来驱动ADAMS/Solver。
这样ADAMS/Solver在仿真时可更进一步地完成对模型的分析和修改的自动化工作。
CONSUB发出requet(请求),regulate(调整),和varyimulation(改变仿真)的命令,并通过作出的交互式命令来修改数据,或者进行不同的分析。
ADAMS数据使用介绍精品PPT课件

稀疏矩阵输入正确性的检验
ToolsDatabase navigatorMatrix
矩阵数据文件格式 ADAMSMAT2
字符串 Strings
• 可连续输入,但 ADAMS/View or ADAMS/Solver 读
取字符串单元时不能将其断开。
• 在用户程序中用GTSRTG subroutine 读取字符串。 • 应用举例:在程序中用字符串单元传递文件名。
子程序。
建立数据单元方法
• 在ADAMS/View 菜单BuildData elements
选 Array, Curve, Spline, Matrix, String 选New:创建新的数据单元
Modify:修改数据单元
数组单元 Array
• 普通/初始条件 General/Initial Conditions : 定义通常
用户输入:输入行数、列数 、循序输入数据
仿真结果:输入结果集名称
文件:输入文件名、文件中 数组名称
稀疏矩阵输入法
• 例:
1.364 0
0
0
3.546 4.008
ቤተ መጻሕፍቲ ባይዱ
0
0.7999
在Row index 栏输入1, 3, 3, 4
在Column index 栏输入1, 1, 2, 2
在Value栏输入:1.364,-3.546, 4.008, 0.7999
保存和访问数据
▪ 数据类型:
数组 Array 曲线 Cirve 样条 Spline 矩阵 Matrix 字符串 String
▪ 建立和储存各种类型的数据可方便重复使用,
并节省内存。
数据单元的用途
• Array :定义输入值、变量、初始条件,可用于线性状态方程
ADAMS基础介绍
仅仅包括 model 原件与其属性 文件很小, 文字档(可阅读),可跨平台 只包含一个 model !!!
ADAMS 可导入/出的文件格式还有 :
ADAMS/Solver 输入文件 (.adm) 模型交换文件 (STEP,IGES,DXF,DWG,Wavefront,
Open/Closed, Knot Points, Anchor CSM, Parent Part
2.实体建模
16
机械系统动力学分析软件
简单几何实体建造
Type
Tool
Boxes
Cylinders
Spheres/ Ellipsoids
Frustums
Torus
Graphic
Parameters
Length (x), Height (y), Depth(z), Anchor CSM, Parent Part
可移动的零件 具有质量、惯性矩 不会变形
Flexible Bodies
可移动的零件 具有质量、惯性矩
当承受作用力时会变形
Point Masses
可移动的零件 具有质量但沒有惯性矩
Ground Part
在每一个 model 都存在 永远保持固定不动 model建立时会自动建立 不会对 model 增加 DOF
stereolithography,Parasolid, etc)
测试文件、计算结果表格文件等 仿真结果文件 (.msg, .req, .out, .gra, .res).
ADAMS 基礎訓練課程软 件核心模块
设定工作目录 2.实体建模
13
机械系统动力学分析软件
ADAMS软件操作基础精讲
3.7 定义操作环境
定义地面坐标系
默认:笛卡儿坐标系作为地面坐标系, 313旋转系列
单位设置
单 位 系 统 长 度 质 量 力 时 间 角 度 频 率
1 MMKS 毫 米 公 斤 牛 顿 秒 度 弧 度 /秒
2 MKS
米 公 斤 牛 顿 秒 度 弧 度 /秒
3 CGS 厘 米 克 达 因 秒 度 弧 度 /秒
设置工作栅格、图标对话框
显示 设定
选择显 示对象
设置栅 格方向
设置栅格 类型、尺 寸、间隔
设置栅 格位置
设置不 同类型 对象的 图标
设置图 标尺寸
显示方式设置
显示视图辅助信息: View Accessories, 坐标窗口操作
设置屏幕和打印字体 Settings --- Fonts 保存和重新设置 Save/Restore Settings
3.1 ADAMS软件包
ADAMS/View(基本环境)* ADAMS/Solver (求解器)* ADAMS/PostProcessor(后处理)*
ADAMS/Car(轿车模块)、 ADAMS/Rail(机车模块)、 ADAMS/Driver(驾驶员模块)、 ADAMS/Tire(轮胎模 块)、ADAMS/Linear (线性模块)、ADAMS/Flex (柔性模块)、ADAMS/Controls(控制模块)、 ADAMS/FEA(有限元模块)、ADAMS/Hydraulics(液压 模块)、ADAMS/Exchange(接口模块)、 Mechanism/Pro (与Pro/Engineer 的接口模块)、 ADAMS/Animation(高速动画模块)
4 IPS 英 寸 斯 磅 力 秒 度 弧 度 /秒
新手上路:ADAMS基础知识讲解(图文并茂)【转载仿真论坛】(六)

新手上路:ADAMS基础知识讲解(图文并茂)【转载仿真论坛】(六)六、adams与CAD数据转换篇(一)、proe与adams的联合仿真1、ADAMS与Pro/E的接口组合的完整说明Following is a list of possible combinations:1. ADAMS2005 + MECHPro2005 + Pro/ENGINEER Wildfire2.0 (M010) --> Will Work2. ADAMS2003 + MECHPro2005 + Pro/ENGINEER Wildfire2.0 (M010) --> Will Work3. ADAMS2003 + MECHPro2005 + Pro/ENGINEER 2001 (2002030) --> Will not work since MECHPro2005 does not support Pro/E20014. ADAMS2005 + MECHPro2005 + Pro/ENGINEER 2001 (2002030) --> Will not work since MECHPro2005 does not support Pro/E20015. ADAMS2003 + MECHPro12.0 + Pro/ENGINEER Wildfire 2.0 (M010) --> Will not work6. ADAMS12.0 + MECHPro12.0 + Pro/ENGINEER 2001 (2002030) --> Will Work7. ADAMS2003 + MECHPro12.0 + Pro/ENGINEER 2001 (2002030) --> Will work after changes mentioned in KB 10645 are applied.8. ADAMS12.0 + MECHPro12.0 + Pro/ENGINEER2003 --> Will Work2、ADAMS与Pro/E的接口组合:目前,Proe和Adams能够有效工作的有下面几种组合:2.1. Adams 2005 + Mech/pro 2005 + Pro/E Wildfire 2.02.2. Adams 2003 + Mech/pro 2005 + Pro/E Wildfire 2.02.3. Adams 12 +Mech/pro 12 + Pro/E 20012.4. Adams 12+Mech/pro 12 + Pro/E Wildfire 2.0其中前3种我是总结坛子上的内容,第4种是我根据坛子中提供的超时补丁nmsd,尝试成功的。
Adams软件文档资料集锦续(五)
了液压系统的集成块,减小了支撑系统对风洞的阻塞。建立了液压系统NN-PID
控制的算法,借助Matlab分析了该算法控制时的运动误差,仿真结果证明采用
以上方法可以保证CTS移测架的设计精度。
6.三自由度并联物料振动分拣平台机构设计及运动仿真 为解决传统物料振动分拣平台无法实现多维振动的问题,提出了一种三自由度 并联物料振动分拣平台,可满足物料振动分拣需要.该机构由共面的2条(P-RU)支路及1条(P-R-C)支路组成,可实现动平台沿x,z轴的平移和绕x轴的转动.
ANSYS上做了应力分析,研究最大工作点变形情况,以UG设计系统三维模型,在
Adams与MATLAB上仿真系统动力特征,进行优化设计。试验中在Code Composer
Studio2上调试DSP控制程序,设计出离心泵磁悬浮轴承控制系统。试验结果表
明:设计的磁悬浮轴承运行效率较橡胶轴承立式离心泵提高了4%~6%,延长导
17.变性偏心圆—非圆行星系分插机构分析、设计与参数优化 设计了具有自主知识产权的新型分插机构——变性偏心圆-非圆齿轮行星系分插 机构,研究内容主要有:1)通过对日本的高速插秧机旋转式分插机构以及目前常用
的曲柄摇杆分插机构的工作机理和运动特性分析,指出旋转式分插机构的核心技
术是非匀速传动机构。2)本论文首次提出了将变性应用到偏心-非圆齿轮中,形成
消除数值振荡;第三,采用一种新型的基于指数p 的非线性优化技术,使计
算在线性和非线性状态
2.3-PTT串并联数控机床伺服系统运动学耦合特性研究 为分析串并联机构运动学耦合问题,提出了一种串并联机构的运动学正、逆解 耦分析方法,分析了3-PTT串并联机床伺服进给系统加工过程中运动学耦合机
Adams中的命令
ADAMS常用函数总结!在使用adams的过程中,由于函数比较多,大概有11种之多,如 1、Displacement Function 2、Velocity Functions 3、 Acceleration Functions 4、 Contact Functions 5、 Spline Functions 6、 Force in Object Functions 7、Resultant Force Functions 8、 Math Functions 9、 Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、 STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明:x ―自变量,可以是时间或时间的任一函数x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量h0 ― STEP函数的初始值,可以是常数、设计变量或其它函数表达式h1 ― STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、 IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数 IF(time-2.5:0,0.5,1)结果: 0.0 if time < 2.50.5 if time = 2.51.0 if time >2.5MSC.ADAMS 中IF语的写法和含义□基本粒子发表于 2005-7-6 20:52:00IF 语句的形式是这样的IF(表达式1:表达式2,表达式3,表达式4)如果表达式1的值小于0 执行表达式2如果表达式1的值等于0 执行表达式3如果表达式1的值大于0 执行表达式4所以你的函数可以写为IF(time-8:你的表达式,你的表达式,0)就可以了3、AKISPL函数格式:AKISPL (First Independent Variable, Second Independent Variable,Spline Name, Derivative Order)参数说明:First Independent Variable ——spline中的第一个自变量Second Independent Variable (可选) ——spline中的第二自变量Spline Name ——数据单元spline的名称Derivative Order (可选) ——插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1) spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
名词解释Adams
Adams/car的悬架分析(Suspension Analyses),共提供悬架38种性能。
对所有悬架均提供:• Aligning Torque - Steer and Camber Compliance //单位回正力矩的转角或外倾角• Camber Angle //外倾角• Caster Angle //后倾角• Dive Braking/Lift Braking //制动点头/制动抬头• Fore-Aft Wheel Center Stiffness //悬架纵向刚度• Front-View Swing Arm Length and Angle //前视图(虚拟)摆臂长度和角度• Kingpin Inclination Angle //主销内倾角• Lateral Force - Deflection, Steer, and Camber Compliance //• Lift/Squat Acceleration //抬头(一般指启动时前悬架抬升,后悬架压缩)• Percent Anti-Dive Braking/Percent Anti-Lift Braking //(前悬架)防点头/(后悬架)防抬升• Percent Anti-Lift Acceleration/Percent Anti-Squat Acceleration //• Ride Rate //悬架动刚度• Ride Steer //悬架转向性能• Roll Camber Coefficient //侧倾轮倾系数(车身侧倾时车轮侧倾角与车身侧倾角的比值)• Roll Caster Coefficient //• Roll Center Location //侧倾中心位置• Roll Steer //Ride steer is the slope of the steer angle versus the vertical wheel travel curve. Ride steer is the change in steer angle per unit of wheel center vertical deflection due to equal vertical forces at the wheel centers. Positive ride steer implies that the wheels steer to the right, as the wheel centers move upward.引导滚/ /骑牛引导的坡角与垂直轮旅行曲线。
实用的Adams使用技巧
实用的Adams使用技巧、教程一,Adams常见问题篇1、ADAMS中的单位的问题开始的时候需要为模型设置单位。
在所有的预置单位系统中,时间单位是秒,角度是度。
可设置:MMKS--设置长度为千米,质量为千克,力为牛顿。
MKS—设置长度为米,质量为千克,力为牛顿。
CGS—设置长度为厘米,质量为克,力为达因。
IPS—设置长度为英寸,质量为斯勒格(slug),力为磅。
2、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
3、关于ADAMS的坐标系的问题。
当第一次启动ADAMs/View时,在窗口的左下角显示了一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/View 将全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置,ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、关于物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过MODIFY物体的position属性;令一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
5、关于ADAMS中方向的描述。
对于初学的人来说,方向的描述不太容易理解。
之前我们都是用方向余弦之类的量来描述方向的。
ADAMS 基本介绍

1.2、虚拟样机技术的起源及发展
虚拟样机技术是一项新生的工程技术。借
助于这项技术,工程师们可以在计算机上 建立机械系统的模型,伴之以三维可视化 处理,模拟在现实环境下系统的运动和动 力特性,并根据仿真结果精化和优化系统 的设计与过程。
1.3、虚拟样机技术应用领域 虚拟样机技术已经广泛地应用在各个领域里: 1、汽车制造业 2、工程机械 3、航天航空业 4、国防工业 5、通用机械制造业
第3章、ADAMS/View建模仿真步骤
Virtual Prototyping 整合系統
1. 2. 3. 4. 5. 6. 7. 8. 9.
I-DEAS UG CATIA Pro/E CADDS 5 Solidworks CoCreate AutoCAD Microstation
1. MATRI Xx 2. MATLA B 3. Easy5
Merge
合并两个不 相交的实体
取相交形体 实体切割 实体还原
把第一个实体并入到第二个实体中
Intersect Cut Split
保留相交部分的实体,所形成的实体特 性与第一个实体相同 用第一个实体去切第二个实体,删除第 一个实体和相交部分的第二个实体 将经过以上布尔操作的实体还原
4.5、实体的特征操作
名称图标说明铰接副revolute允许2个零件相对转动去除2个旋转和3个移动自由度移动副translational允许2个零件相对移动去除3个旋转和2个移动自由度圆柱副cylindrical允许2个零件相对移动或转动去除2个旋转和2个移动自由度运动副约球副spherical允许2个零件相对转动去除3个移动自由度平面副planar允许2件在一平面内运动去除2个旋转和3个移动自由度束名称图标说明恒速副constantvelocity限定两个旋转运动等速去除1个旋转和3个移动自由度万向节hookeuniversal旋转运动在两个零件间传递去除1个旋转和3个移动自由度螺旋副允许2个零件作相对螺旋运动去除2个旋运动副screw转和3个移动自由度齿轮副gear复杂运动副把3个零件和2个简单运动副连接起来形成齿轮运动和其它类型的运动关联副coupler把2个或3个简单运动副连接起来实现运动或能量的传递固定副fixed把2个零件固连在一起约束名称图标说明平行约束parallelaxes限定两个零件的零件坐标系z轴始终平行去除2个旋转自由度垂直约束perpendicular限定两个零件的零件坐标系z轴垂直去除1个旋转自由度52基本约束jointprimitivesar方向约束orientation限定两个零件的零件坐标系坐标轴同向不能相对旋转去除3个旋转自由度点面约束inplane限定一个零件在另一个零件的某个平面上运动去除1个移动自由度点线约束inline限定第一个零件沿第二个零件上的某条直线运动去除两个移动自由度53运动约束?运动约束通过对模型施加运动来实现对模型的约束一旦定义好运动后模型就会按照所定义的运动规律进行运动而不考虑实现这种运动需要多大的力或力矩
adams各部分建模说明

我的car,发动机,制动器,驱动半轴,车身,横向稳定杆,轮胎等参数总结用car能有大半年了。
前几日发表了几个帖子说过要与苦闷专研的兄弟共享学习经验的。
我就创建一个自己的帖子吧,把自己随时随刻的经验或是困惑拿出来与大家共享或讨论。
可能有些唠叨可我还是要感谢一下我应当感谢的:首先是领我入门的师兄;二是“逼”我上梁山可上海科曼公司;三是有这么好的一个simwe;四是武汉的我那帮从未叫过师兄的师兄们,五就是我的网上的难兄难弟们;六~~~~~~~~~~~一:发动机参数的修改:发动机模块本人认为是最难的模块,其难处有二,一是模型的建立主要就是与整车的communicators 这个我以前的帖子有说过,下面我会剪过来,这里就不重复了。
二就是建完发动机后对其参数的修改。
其中发动机参数修改有两大块 1:build—parameter variable_table这个里面的参数应当好理解一些各位参考一下help应当不难2:build_general Data elements _spline_modify 然后在name对话框里选择gss_engine_torque,那里面你就可以看到采用的发动机文件。
(当然也可以直接到安装目录下找到)关键是对这个文件的理解,只有理解了才好修改。
(Z_DATA) {throttle}0.01.00(XY_DATA){engine_speed <no_units> torque <Nmm>}0 0 0500 -20000 800001000 -42000 1350001500 -44000 2000002000 -46000 2450002500 -48000 2630003000 -50000 3100003500 -50000 3580004000 -50000 4040004500 -50000 4550005000 -50000 4750005500 -50000 4850006000 -50000 4680006250 -50000 4620006500 -52000 4550006750 -56000 4270007000 -60000 3700007500 -64000 259000最关键的就是这三列数据,很不容易搞懂。
2章 1节 ADAMS基础简介
2013年7月11日星期四
§2.1 ADAMS简介 -5 ADAMS/View基础应用
• 约束工具包的第五行:
XMUT
第2章
• Planer Joint 平面副:有2个平移自由 度和1个旋转自由度,约束了1个平移 和2个旋转自由度。 • Gear 齿轮副:1个自由度。
ADAMS基础
• 最后一个图标按钮:Joint Palette
§2.1 ADAMS简介 -2 ADAMS仿真过程
XMUT
2013年7月11日星期四
第2章 ADAMS基础
§2.1 ADAMS简介 -3 打开ADAMS
XMUT
2013年7月11日星期四
第2章 ADAMS基础
§2.1 ADAMS简介 -3 打开ADAMS
① 建立新模型
XMUT
第2章
② 打开已有模型
③ 输入文件
ADAMS基础
④ 退出
⑤ 文件目录
⑥ 文件名
⑦ 重力
⑧ 单位
2013年7月11日星期四
§2.1 ADAMS简介 -3 打开ADAMS
XMUT
第2章 ADAMS基础
设置重力加速度大小以及方向
2013年7月11日星期四
§2.1 ADAMS简介 -3 打开ADAMS
XMUT
第2章 ADAMS基础
XMUT
• Main Toolbox • Main Toolbox
第2章 ADAMS基础
⑦涂色工具 ①显示工具
②建模工具 ⑧加载运动
⑨动画工具 ③测量工具 ⑩移动操作 ④恢复重做
⑾加载动力 ⑤约束工具
⑿后处理 ⑥仿真工具
2013年7月11日星期四
§2.1 ADAMS简介 -5 ADAMS/View基础应用
ADAMS基础知识讲解

1、单位开始时需要为模型设置单位。
在所有的预置单位系统中,时间单位为秒,角度为度。
可设置:MMKS--长度千米,质量为千克,力为牛顿。
MKS—长度为米,质量为千克,力为牛顿。
CGS—长度为厘米,质量为克,力为达因。
IPS—长度为英寸,质量为斯勒格(slug),力为磅。
2、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
3、坐标系当第一次启动ADAMs/View时,在窗口的左下角显示一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/View将全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置。
ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过modify物体的position属性;另一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
5、方向的描述对于初学的人来说,方向的描述不太容易理解。
之前我们都是用方向余弦之类的量来描述方向的。
在ADAMS中,为了求解方程时计算的方便,使用欧拉角来描述方向。
就是用绕坐标轴转过的角度来定义。
旋转的旋转轴可以自己定义,默认使用313,也就是先绕Z轴,再绕X轴,再绕Z轴。
adams_solver(ADAMS求解器培训资料)
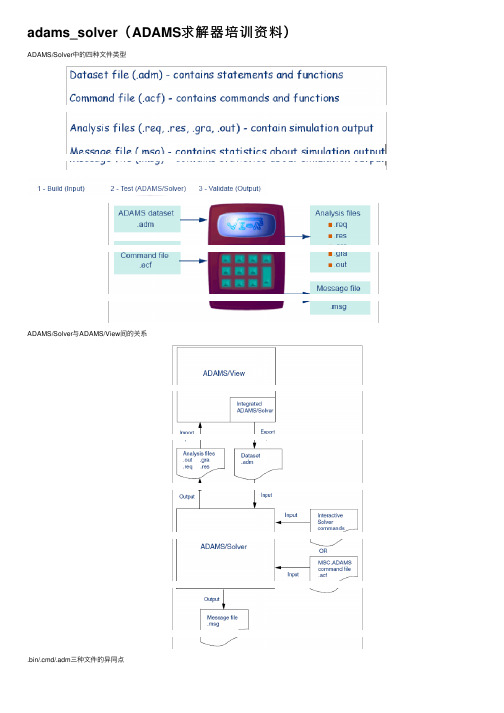
Simulating a model in ADAMS/Solver
adams05r2 ru‐s belt_2d_pt_circle _hht.acf ex hht acf 练习: 读懂.acf文件运行模型
模型文件: shell_contact / shell contact
GearGenerator2003_de mo_shell.acf mo shell.acf 练习:批处理运行
set MDI_ADAMS_CPU_COLUMN="Y" call adams05r2 ru‐s belt_2d_pt_circle_hht.acf ex call adams05r2 ru‐s belt_2d_pt_circle_si2.acf ex belt2d pt circle si2acf 模型文件:HHT / run_models.bat 模型文件run models bat ADAMS/Solver Subroutines
用户子程序流程总结 P1. 编写程序代码user.c; P2. 在VC中编译user.c,生成user.obj; P3. 使用adams命令行,由user.obj生成user.dll; d命令行由bj dll P4. 将user.dll加入到adams库中; P5. 在Function Builder中即可使用自定义的函数。
模型文件: shell_contact / shell contact GearGenerator2003_de mo_shell.adm mo shell.adm ADAMS/Solver command file
练习: 读懂.acf文件
模型文件: shell_contact / shell contact GearGenerator2003_de mo_shell.acf mo shell.acf
ADAMS基础知识讲解
新手上路:ADAMS 基础知识讲解(图文并茂)经过不知道多少个日夜,终于出来一个雏形了,由于时间问题,内容还不全,以后将不断完善,请大家多多支持!内容大纲如下:1.adams软件介绍2.adams学习书籍3.软件安装问题4.常见基础问题4.1一般问题4.2有关齿轮副4.3有关凸轮副4.4蜗轮蜗杆模拟4.5有关行星齿轮传动4.6spline5.常用函数5.1函数总体介绍5.2样条函数:akispl,cubspl5.3step函数5.4IF函数5.5impact与bistop函数5.6gforce和sforce函数5.7sensor,acf的应用6.adams与CAD数据转换6.1proe6.2UG6.3catia6.4solidwork6.5其他CAD软件7.flex相关7.1autoflex8.MA TLAB和ADAMS联合仿真篇一、软件介绍篇ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。
1973年Mr. Michael E. Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。
密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。
2002年3月18日MSC.Software公司并购MDI公司,自此ADAMS 并入MSC产品线名称为MSC.ADAMS(本文仍简称ADAMS)。
ADMAS软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、接口模块、工具箱5类,其中核心模块为ADAMS / View——用户界面模块、ADAMS / Solver——求解器和ADAMS/Postprocessor——专用后处理模块。
adams命令流大全和快捷方式

adams命令流大全和快捷方式简介本文档将为您提供关于adams命令流和快捷方式的详细信息和使用方法。
___命令流Adams命令流是Adams仿真软件中的一个功能,它允许用户以脚本方式自动执行一系列Adams命令。
命令流可以用于自动化重复性任务、快速批处理和执行复杂的仿真流程。
以下是一些常用的Adams命令流的示例:创建和定义模型:___:创建一个新的Adams模型___:加载现有的Adams模型definePart`:定义一个零件设置模型参数:___:设置时间步长___:设置重力___:设置材料属性添加约束和力:addConstraint`:添加约束addForce`:添加力运行仿真:initialize`:初始化模型___:运行仿真getResult`:获取仿真结果保存和加载仿真数据:___:保存仿真数据到文件loadData`:从文件加载仿真数据Adams快捷方式Adams还提供了一些便捷的快捷方式,以提高用户的工作效率和便利性。
以下是一些常用的Adams快捷方式的示例:快捷键:Ctrl + S`:保存模型Ctrl + Z`:撤销上一步操作Ctrl + Y`:重做上一步操作Ctrl + C`:复制选定的对象Ctrl + V`:粘贴复制的对象鼠标右键菜单:右键单击对象:显示该对象的相关操作菜单右键单击模型:显示模型的整体操作菜单请记住这些常用的Adams命令流和快捷方式,并根据需要进行适当的调整和使用。
希望这些信息对您有帮助!本文档旨在提供关于adams命令流和快捷方式的详细说明。
在使用adams时,了解和掌握命令流和快捷方式将能够帮助您更高效地进行模拟和分析。
1.命令流命令流是一种用于自动化和批量执行adams命令的方法。
通过预先定义一系列的adams命令,您可以将这些命令作为一组输入给adams,从而实现自动执行多个操作的目的。
以下是命令流的一些常用操作和示例:创建命令流文件:通过使用adams的文件编辑器,在一个文本文件中编写adams命令流。
(全)ADAMS 基础知识讲解(图文并茂)【转载仿真论坛】介绍
目录1.adams软件介绍2.adams学习书籍3.软件安装问题4.常见基础问题4.1一般问题4.2有关齿轮副4.3有关凸轮副4.4蜗轮蜗杆模拟4.5有关行星齿轮传动4.6spline5.常用函数5.1函数总体介绍5.2样条函数:akispl,cubspl5.3step函数5.4IF函数5.5impact与bistop函数5.6gforce和sforce函数5.7sensor,acf的应用6.adams与CAD数据转换6.1proe6.2UG6.3catia6.4solidwork6.5其他CAD软件7.flex相关7.1autoflex8.MATLAB和ADAMS联合仿真篇一、软件介绍篇ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。
1973年Mr.Michael E.Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。
密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。
2002年3月18日MSC.Software公司并购MDI 公司,自此ADAMS并入MSC产品线名称为MSC.ADAMS(本文仍简称ADAMS)。
ADMAS软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、接口模块、工具箱5类,其中核心模块为ADAMS/View——用户界面模块、ADAMS/Solver——求解器和ADAMS/Postprocessor——专用后处理模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS/View二进制数据库bin文件以“ .bin”为文件名后缀,文件中记录了从ADAMS启动后到存储为bin文件时的全部信息-包含模型的完整拓扑结构信息、模型仿真信息以及后处理信息。
可以包含多个模型、多个分析工况和结果。
可以保存ADAMS/View的各种设置信息。
文件为二进制不能阅读、编辑,只能通过ADAMS/View调阅,由于信息全面一般文件都比较大。
ADAMS/View命令cmd文件以“ .cmd”为文件名后缀,是由ADAMS/View命令编写的模型文件,可以包含模型的完整拓扑结构信息(包括所有几何信息)、模型仿真信息,为文本文件,可读性强,可以进行编程,是ADAMS的二次开发语言,不包含ADAMS/View的环境设置信息,不包含仿真结果信息,只能包含单个模型。
ADAMS/Solver模型语言(ADAMS Data Language)adm文件,以“ .adm”为文件名后缀,文件中包含模型中拓扑结构信息,但有些几何形体如 link等不能保留。
ADAMS/View的环境设置不能保留。
ADAMS/Solver可以读取adm文件,与ADAMS/Solver仿真控制语言acf文件配合可以直接利用ADAMS/Solver进行求解。
ADAMS/Solver仿真控制语言acf文件,以“ .acf”为文件名后缀,文件中可以包含ADAMS/Solver命令对模型进行修改和控制的命令,从而控制仿真的进行。
ADAMS/Solver将仿真分析结果中用户定义的输出变量输出到req文件,以“.req”为文件名后缀;ADAMS/Solver将仿真分析结果中将模型的缺省输出变量输出到res文件,以“ .res”为文件名后缀;ADAMS/Solver将仿真分析结果中图形部分结果输出到gra文件,以“ .gra”为文件名后缀。
ADAMS/Solver将仿真分析结果中用户定义的输出变量以列表的形式输出到out文件,以“.out”为文件名后缀。
ADAMS/Solver将仿真过程中的警告信息、错误信息输出到msg文件,以“.msg”为文件后缀。