汽车_自适应前照灯控制系统
自适应前照灯系统的工作原理与优势

自适应前照灯系统的工作原理与优势随着汽车科技的不断发展,自适应前照灯系统作为一项重要的创新技术,已成为现代汽车中的热门配置。
在夜间行驶中,灯光的亮度与方向对驾驶安全至关重要。
自适应前照灯系统能够根据道路、环境和交通情况自动调整灯光的亮度和方向,提高驾驶者的安全性和驾驶舒适性。
本文将介绍自适应前照灯系统的工作原理和优势。
一、工作原理自适应前照灯系统主要由传感器、控制单元和照明模块组成。
传感器用来监测车辆周围的环境信息,如车速、前方车辆、路面状况等。
控制单元根据传感器提供的数据来调整照明模块的亮度和方向。
照明模块可以分为近光灯和远光灯两部分,根据不同的驾驶环境和需求进行自动切换。
当车辆行驶在市区或有其他车辆靠近时,自适应前照灯系统会自动将灯光调整为近光灯模式,以避免对其他驾驶者产生干扰。
当车辆行驶在无人车道或开阔的道路上时,系统会切换到远光灯模式,提供更远的照明距离,增加驾驶者的视野。
同时,自适应前照灯系统还可以根据车速调整光束的宽度和角度,确保可见范围和照明效果的最佳匹配。
二、优势1. 提高驾驶安全性:自适应前照灯系统能够根据不同的道路状况和车辆行驶速度自动调整灯光,为驾驶者提供最佳的照明效果。
在夜间行驶中,良好的照明条件可以提高驾驶者对前方障碍物的识别和反应速度,减少事故的发生。
2. 减少对其他驾驶者的干扰:自适应前照灯系统能够通过切换近光灯和远光灯模式来避免对其他驾驶者产生干扰。
在有车流的道路上,使用近光灯可以有效减少对面车辆的眩光,提高交通的安全性。
3. 增强驾驶者舒适性:自适应前照灯系统可以根据车速和环境变化来自动调整光束的宽度和角度,确保驾驶者的视野始终保持最佳状态。
这不仅提高了驾驶者的舒适性,也减轻了驾驶疲劳,提高了行车体验。
4. 节能环保:自适应前照灯系统采用LED灯作为光源,与传统的卤素灯相比,LED灯具有更高的光效和更长的使用寿命。
LED灯的节能和环保特性可以减少车辆能耗和二氧化碳排放。
汽车自适应前照等(AFS)系统

灯光与照明技术/标准委员会
灯光与照明技术/标准委员会
前轮
灯光与照明技术/标准委员会
后轮
2.光源系统:
汽车蓄电池给电子镇流器供电12V,电子镇流器 启动,产生高压脉冲(约22000伏),HID光源 启动。之后镇流器稳定输出85伏的交流电压, 使光源启动后工作于正常电流0.4安,灯泡功率 维持在35瓦左右。如图所示,在该HID光源启动 后1秒内,光源能发出额定光通量的1/4,即800 流明(=3200流明×25%),接近H4光源副丝的 水平;在4秒内,达到额定值的80%,即2560流 明,远高于H4光源主丝的水平。这样,就充分 保证了装配HID前照灯的汽车夜晚行驶的安全。
灯光与照明技术/标准委员会
4.电机:
用于实现AFS功能中E模式(高速公路模式)及静&动态自动水平调光功能。
灯光与照明技术/标准委员会
电机根据功能及通信方式有很多种结构 和分类,在此不再一一描述,感兴趣的 同事可以单独交流。
5.控制器:Master ECU
控制系统是核心,MasterECU从总线或硬线束获取信号单元发送或传感器输出的信号,进行相应 的计算、处理,形成相应的控制信号并发送至SlaveECU再到各执行机构。控制系统具有能够响应高 速总线丰富的指令集以及极短的指令周期和极高的处理速度的单片机,在保证控制系统的稳定性和 可靠性的同时,保证系统控制精度和速度。
灯光与照明技术/标准委员会
3.光学系统-投射灯:
投射灯光学系统(PES)是实现AFS功能 必不可少的,PES 单元安装在PES支架上, 在AFS工作时,PES单元通过旋转执行机 构驱动而绕旋转轴转动,从而实现AFS中 的弯道照明功能。
PES有单近光和远近光一体两种形式,
自适应前照灯控制系统

自适应前照灯控制系统
概述
自适应前照灯控制系统(Adaptive Front-lighting System,简称AFS)是一种智能灯光调节系统。
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS 自动控制前照灯实时进行上下、左右照明角度的调整,为驾驶员提供良好的道路照明效果。
经纬恒润作为AFS控制系统供应商,已经成功为包括通用(GM)、上海通用(SGM)、长城、上汽、北汽、广汽、一汽在内的多家国内外客户进行了AFS控制系统的配套。
系统功能
自适应前照灯控制系统能够显著改善各种路况下的照明效果,提高行车安全。
虚线表示无动态调光的光照角度
上下调节功能
左右调节功能
系统组成
乘用车的自适应前照灯控制系统由主控制器单元、左/右旋转执行器、左/右调光电机、前/后车身高度传感器组成。
AFS 系统(上下左右调节功能)
ALS 系统(上下调节功能)。
汽车用自适应前照明系统标准解读与分析

汽车用自适应前照明系统标准解读与分析孙晓娜武华堂陈萍韩思远刘然张萌国家汽车质量监督检验中心(襄阳),湖北襄阳441004摘要:为了更好地理解自适应前照灯系统(Adaptive Front-lighting System,简称AFS)测试标准及顺利开展汽车灯具检测工作,以欧标ECE R123为依据,首先对近光主要配光测试点进行解读,分析了AFS系统各近光模式功能和配光要求之间的差异;其次,将其与现行的国家标准GB/T30036进行了对比分析;最后,研究了AFS与传统前照灯在配光试验时检测方法和测试点的差异。
关键词:AFS;标准;传统前照灯;对比分析引言随着车辆的迅速普及,驾驶安全问题也日益凸显,作为汽车主动安全装置之一的照明系统的改进和创新也成为人们关注的焦点[1]。
但实际的道路环境、天气状况等情况十分复杂,传统照明系统的单一照明模式已经无法满足人们日益增长的行驶安全需求[2-3]。
因此,改变传统的汽车前照明的固有模式,研究新型的AFS系统已经成为世界各国提高汽车安全性和舒适性的主流趋势之一[4-5]。
AFS系统不止具有一种照明模式,是一种能够根据汽车所处的路况、天气环境以及自身的状态,自动产生一种符合该环境条件的光束,实现最好照明效果的智能汽车前照灯系统[6]。
随着AFS的实际应用,联合国欧洲经济委员会于2007年正式发布ECE R123《关于机动车自适应前照明系统(AFS)认证的统一规定》法规,对AFS制定了明确的定义及相关规定。
文章主要以最新修订的欧标ECE R123/02为依据[7],对近光配光规定进行解读与分析,并将其与国家标准GB/T30036—2013[8]和传统前照灯测试国家标准进行比较,这对设计汽车前照灯的研究和检测汽车灯具工作有着重要的意义。
法规解读ECE R123/02法规内容主要包括3个章节,分别为A章节法规的管理条款、B章节法规的主要技术内容和C章节取证后的管理方法。
这里将重点研究B章节部分,主要内容为AFS的配光试验,规定了AFS各种模式光型在配光屏幕上关键点区的光度值,是判定AFS系统和AFS配光设计的标准。
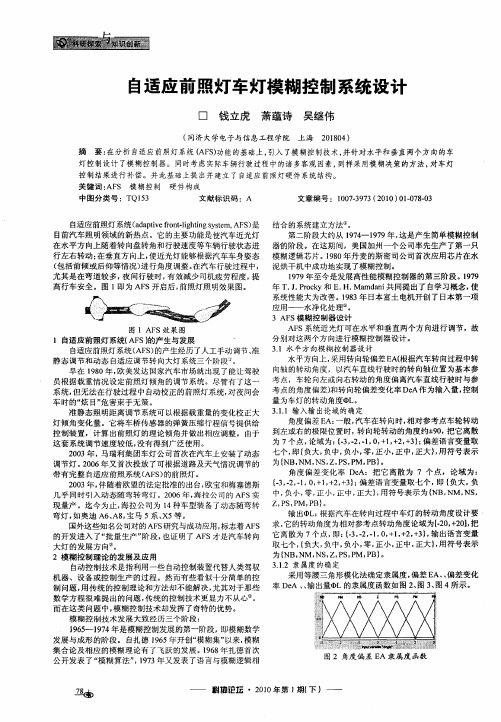
自适应前照灯车灯模糊控制系统设计
结 合 的系 统 建 立 方 法。 。 第二阶段大约从 l7— 17 9 4 9 9年, 这是产生简单模糊控制
器韵阶段。在这期间,美国加州一个公司率先生产 了第一只 模糊逻辑芯片。l8 年丹麦 的斯密司公司首次应用芯片在水 90
泥 烘 干 机 中成 功 地 实现 了模 糊 控 制 。 17 9 9年至今是发展高性 能模糊控制器 的第三阶段 。 9 9 17 年 T.. rcy和 E. Ma a i J Pok H. mdn 共同提 出了 自学 习概念 , 使 系 统 性 能 大 为 改 善 。18 93年 日本 富土 电机 开 创 了 日本 第 一 项 应 用 — — 水 净 化 处 理0 。 3 AF S模 糊 控 制器 设 计 A S系 统近 光灯 可 在 水 平 和 垂 直 两 个 方 向进 行 调 节 ,故 F 分 别 对 这 两 个 方 向进 行 模 糊 控 制 器 设 计 。 31水 平 方 向模 糊 控 制 器设 计 . 水平方向上 , 采用转 向轮偏差 E 根据汽车转向过程 中转 A( 向轴 的转动角度,以汽 车直线行驶时 的转 向轴位置为基本参 考 点 ,车 轮 向左 或 向右 转 动 的角 度 偏 离 汽 车 直 线 行 驶 时 与 参 考 点 的 角 度 偏 差) 转 向轮 偏 差 变 化 率 De 为 输 入 量 , 制 和 A作 控 量 为 车 灯 的 转 动 角度 L 。 31 .. 1输入输出论域 的确定 角度偏差 E 一般 , A: 汽车在转 向时, 相对参考点车轮转动 到 左 或 右 的 极 限位 置 时 , 向轮 转 动 的 角度 约 ̄ 0 把 它 离 散 转 9, 为7 个点 , 论域为: ., ,1 0 + , 2+ } 偏差语言变量取 { - -, , l+ , 3 ; 3 2 七个 , { 大, 即 负 负中 , 小 , , 小 , 中 , 大 } 用 符 号 表 示 负 零 正 正 正 , 为 { N , , , S P ,B} NB, M NS Z P , M P 。 角 度 偏 差 变 化 率 D A:把 它 离 散 为 7 个 点 ,论 域 为 : e { , ,1 0+ , 2+ ) 偏差语言变量取七个 , { . . ., , 1+ , 3 : 3 2 即 负大, 负 中 , 小 , , 小 , 中 , 大 )用 符 号 表 示 为 { NM , , 负 零 正 正 正 , NB, NS z,S P P 。 P , M, B} 输 出O : L 根据 汽车在转 向过程 中车灯的转动角度设计要 求, 它的转动角度为相对参考 点转动角度论域为【 0 + 0 , - , 2 】把 2 它 离 散 为 7个 点 , :. , ,1 0 + , 2 + ) 输 出语 言 变 量 即 { . ., , l+ , 3 , 3 2 取 七 个 ,负 大 , 中 , 小 , , 小 , 中 , { 负 负 零 正 正 正大 }用 符 号 表 示 , 为 { NM , , P ,M , B 。 NB, NS Z,S P P ) 31 隶 属 度 的 确 定 .. 2 采用等腰三角形模化法确 定隶属度 , 偏差 E 、 A、偏差变化 率 D A 、 输 出量 的 隶属 度 函数 如 图 2 图 3 图 4所 示 。 e 、 L 、 、
自适应前照灯的工作原理

自适应前照灯的工作原理
自适应前照灯(Adaptive Front Lighting System,AFS)是一种先进的汽车前照灯系统,它根据车辆驾驶状况和环境条件自动调整光束的方向和亮度,以提供最佳的照明效果和安全性。
以下是自适应前照灯的基本工作原理:
1.车速和转向角度检测:自适应前照灯系统会通过车辆的传
感器监测车速和方向盘的角度,以了解车辆的当前行驶状态。
2.环境照明检测:该系统还使用环境光传感器来检测周围的
照明条件,例如路灯亮度、其他车辆的前灯状态等。
3.算法和控制模块:基于车速、转向角度和环境状况的检测
数据,自适应前照灯系统的算法会计算出最适合的光束方向、亮度和灯光模式。
4.光束方向调整:根据算法的计算结果,自适应前照灯系统
会通过电动或液压机构,将前照灯的光束在水平和垂直方向上进行调整,以适应车辆的转向和车速变化,确保最佳的照明范围。
5.光束亮度调整:根据环境照明检测结果,自适应前照灯系
统会自动调整前照灯的亮度,以避免过亮或过暗对其他道路用户造成干扰,并提供最佳的照明效果。
总的来说,自适应前照灯系统通过车速、转向角度和环境条件的实时监测与分析,自动调整前照灯的光束方向和亮度,以提
供最佳的照明效果和安全性。
这种技术可以使驾驶者在夜间或复杂道路条件下获得更好的可见性,并减少对其他车辆的干扰。
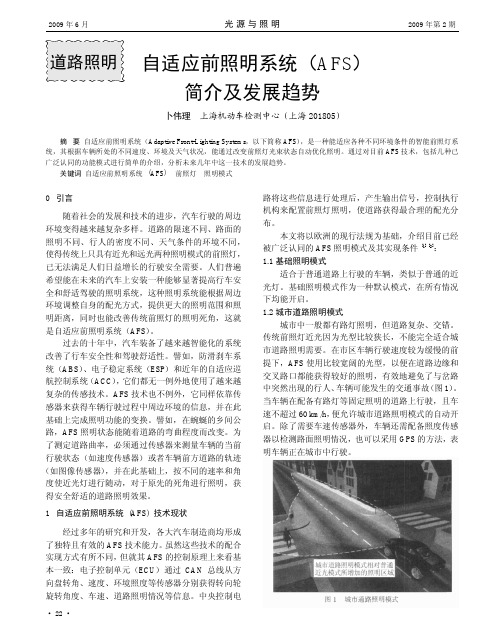
自适应前照明系统_AFS_简介及发展趋势
议上发言, 介绍 LED 路灯的产品和品种以及达到的质 量水平; 同时还邀请了 9 位专家学者就这方面内容和 国际上的现状作了介绍, 还宣传和说明了道路灯具的 性能标准和有关文件, 对全体与会代表的启发很大, 因 此每年的会议吸引了越来越多的参与者。
会议上安排了代表们在晚上参观了余姚市内使用 LED 路灯的路段, 实地体会了在 LED 路灯照明下道路 上的照明效果。有三条使用不同公司不同功率 (120 W、 150 W 和 180 W) 的 LED 路灯。并考察宁波安迪光电 科技有限公司的生产车间和点灯现场。
预见型 AFS 也是目前各大汽车制造商研制开发新 型 AFS 的主要方向。其概念主要基于车辆内部传感器 和外部环境传感器所获得的车况和环境状况信息,以 及对这些信息的处理方法。鉴于各类传感器所提供的 信息量非常巨大,一种能对信息进行高效处理的算法 尤显重要。
2.1.1 传感器 传统 ESP 系统所使用的一些车辆内部传感器(方 向盘转角传感器、加速度传感器以及车轴转速传感器) 可以提供车辆当前行驶状况信息,并通过数据库获得 对车辆转向角度的预测。 此外,还可以通过环境传感器譬如影像传感器来
另一方面,LED 技术在车辆照明灯具上的使用还 处于初级阶段,虽然与当前流行的 HID 光源比较优势 尚少,但随着 LED 新产品的不断开发,发光效率将越 来越高,其在 AFS 中的应用将有很大的发展空间。
参考文献
1 ECE R48 Revision 5 “uniform provisions concerning the approval of vehicles with regard to the installation of lighting and light-signalling devices”:78~80.
汽车自适应前照灯系统的设计分析

C AN/ I u p l ain f AF ( a t e F o t Lg t g S se L N b s a pi t o S Ad pi rn ihi ytm)ae x o n e ee h e sbl y o S d s n c o v n r ep u d d h r.T e faiit fAF e i i g
成及 功能 示意 图 。
AF 是 指 针 对 外 界 条 件 对 汽 车 前 部 照 明 做 最 佳 S 调 整 以 增 强 行 车 安 全 的 系 统 。 AF 技 术 是 一 种 能 够 S 控 制 汽 车 前 照 灯 的 配 光 形 象 , 并 且 控 制 车 灯 光 束 的 照射 角度 随着行 车状 况变化 而上下 左右 调节 的技术 ,
Ke r y wo ds: Ve il e dlm p;A F h ce h a a S; f n to lde in; de i fs fwa e a d ha d u c ina sg sgn o o t r n r war CAN/ N s s se t s e; LI bu ; y tm e t
高 不 下 。给 人 民 的 生 命 财 产 造 成 了 巨 大 损 失 。 目前 传 统 的 车 辆 灯 光 照 明 系 统 存 在 着 诸 多 问题 ,在 复 杂
汽车自适应前照灯系统建模与仿真

汽车在水平路面 上等速行 驶 时的操 纵稳定 性 主要 是通 过 转向盘角输入或力输人 的响应来研 究 , 作为刚 体它具有 6 个 自由度 。为 了获得满意 的计算精度 , 常利 用 4 5个 自由 通 、 度非线性数学模型来模拟 , 即横摆 角速度 、 质心 的侧偏 角 、 车 身侧倾角 、 轮转 角和 转 向盘 转角 为 自由度 , 前 并考 虑轮胎 侧
信 号
处 理 电 路
为 O 、 :质心速度为 V U和 为 在 轴和 Y轴上 的分量 。 LO , 。/ ,
主MC3 I
、
F 分别 为地 面对前 、 轮 的侧偏 反 作用 力 , 挖 后 占为前 轮转
角 ,. a b为质心距前 、 轮的距 离 , 为车辆绕 轴的横摆角 后 可, 速度 , 质心的侧 偏角为 卢, v u 卢= / 。
s ne b t l a i cuayadl s vr ot g o p s , u s h ah acrc n s e hoi . ao s h g e o s n
KEYW ORDS: d p v o t ih y tm fa tmo i A a t e f n —l ts s i r g e o u o b l e;S e p rmoo ;I c e n I t p e tr n r me tP D
大于最小转弯半径的。汽车在弯道上行驶时车速和方 向盘 况下二 自由度 汽车模 型精度 足够。模 型如图 2所示 。
础, 根据汽车转弯时 的几 何关 系推导 出 A S系统数 学模 型 , F
建立 了基 于 增 量 式 PD的 A S控 制 算 法 , 在 MA L B I F 并 TA / s uik下进行了仿真验证了该方法 的可行性 。 i l m n
ALS自适应前照灯系统简介
AFS专论1·AFS自适应前照灯系统简介AFS(Adaptive Front Lighting System)自适应前照灯系统简介AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。
[1]AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS研发背景传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。
在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。
例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
[1]上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。
所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS功能简介阴雨天气的照明:如图1、图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
[1]图1 雨天积水反射的AFS光线(侧视)图2 雨天积水对AFS光线的反射(俯视)乡村道路的照明:在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。
afc参数

afc参数AFC参数AFC(Adaptive Frontlight Control)参数是指自适应前照灯控制系统的参数,该系统通过感应车辆的周围环境和行驶状态,自动调节车辆的前照灯亮度和角度,以提供最佳的照明效果,提高夜间行驶的安全性和舒适性。
一、AFC参数的作用和原理AFC参数是自适应前照灯控制系统的关键参数,它通过传感器感知车辆周围的环境光照强度、车速、方向盘转角等信息,结合车辆自身的灯光系统参数,进行智能调节。
其主要作用包括:根据前方路况自动调节前照灯亮度和角度;根据车速和转向角度调节转向灯的闪烁频率和灯光亮度;根据车内外环境光照强度调节仪表盘和中控台灯光的亮度等。
二、AFC参数的调节范围和策略AFC参数的调节范围通常是根据不同的车型和品牌而有所差异,但都符合一定的调节策略。
例如,在夜间行驶时,AFC系统会根据车速和转向角度自动调节前照灯的亮度和角度,以提供更好的照明效果,并减少对前方来车的干扰。
同时,AFC系统还会根据车内外环境光照强度调节仪表盘和中控台灯光的亮度,以提高驾驶员的可视性和舒适性。
三、AFC参数的优点和局限性AFC参数的优点在于能够根据车辆的行驶状态和环境变化,自动调节灯光亮度和角度,提高夜间行驶的安全性和舒适性。
它可以避免驾驶员因为照明不足或过强而产生视觉疲劳,提高驾驶员对前方路况的感知能力。
然而,AFC参数也存在一定的局限性,例如在极端恶劣天气条件下,传感器可能会受到雨水、雪花等物质的干扰,从而影响系统的准确性和稳定性。
四、AFC参数的未来发展方向随着科技的不断进步,AFC参数在未来还有很大的发展空间。
一方面,可以进一步提高传感器的精度和抗干扰能力,以应对各种复杂的道路和天气条件;另一方面,可以通过与其他安全辅助系统的联动,实现更智能化的前照灯控制,例如与车辆的自动驾驶系统相结合,实现自动调节前照灯亮度和角度的功能。
总结:AFC参数是自适应前照灯控制系统的关键参数,它通过感应车辆的周围环境和行驶状态,自动调节车辆的前照灯亮度和角度,提高夜间行驶的安全性和舒适性。
汽车前照灯智能自适应照明
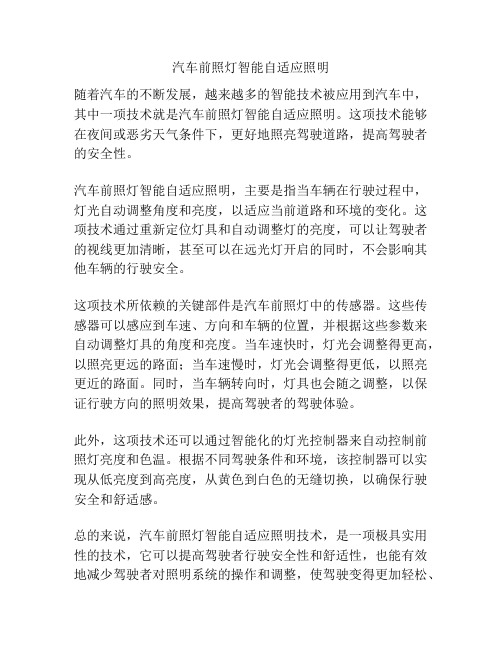
汽车前照灯智能自适应照明随着汽车的不断发展,越来越多的智能技术被应用到汽车中,其中一项技术就是汽车前照灯智能自适应照明。
这项技术能够在夜间或恶劣天气条件下,更好地照亮驾驶道路,提高驾驶者的安全性。
汽车前照灯智能自适应照明,主要是指当车辆在行驶过程中,灯光自动调整角度和亮度,以适应当前道路和环境的变化。
这项技术通过重新定位灯具和自动调整灯的亮度,可以让驾驶者的视线更加清晰,甚至可以在远光灯开启的同时,不会影响其他车辆的行驶安全。
这项技术所依赖的关键部件是汽车前照灯中的传感器。
这些传感器可以感应到车速、方向和车辆的位置,并根据这些参数来自动调整灯具的角度和亮度。
当车速快时,灯光会调整得更高,以照亮更远的路面;当车速慢时,灯光会调整得更低,以照亮更近的路面。
同时,当车辆转向时,灯具也会随之调整,以保证行驶方向的照明效果,提高驾驶者的驾驶体验。
此外,这项技术还可以通过智能化的灯光控制器来自动控制前照灯亮度和色温。
根据不同驾驶条件和环境,该控制器可以实现从低亮度到高亮度,从黄色到白色的无缝切换,以确保行驶安全和舒适感。
总的来说,汽车前照灯智能自适应照明技术,是一项极具实用性的技术,它可以提高驾驶者行驶安全性和舒适性,也能有效地减少驾驶者对照明系统的操作和调整,使驾驶变得更加轻松、愉悦。
在未来,该技术将会更加普及,搭载在更多的汽车上,并不断得到更新和升级。
随着科技的不断进步和智能化的趋势,越来越多的汽车制造商已经开始关注汽车前照灯智能自适应照明技术的开发和应用。
随着汽车生产技术和电子技术的不断进步,这项技术也将会不断得到完善和升级。
在汽车行业中,许多制造商已经应用了汽车前照灯智能自适应照明技术。
比如BMW的智能自适应前照灯系统,它可以根据车速、转弯角度、路面坡度等参数来自动调整灯光的照射角度,并且可以自动切换远光灯和近光灯。
奥迪的Matrix LED前照灯技术,则是通过数百个控制LED灯的独立控制器,实现了更加精确和无缝的光束切换,以提供更好的照明效果。
ALS自适应前照灯系统简介
AFS专论1·AFS自适应前照灯系统简介AFS(Adaptive Front Lighting System)自适应前照灯系统简介AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。
[1]AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS研发背景传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。
在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。
例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
[1]上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。
所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS功能简介阴雨天气的照明:如图1、图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
[1]图1 雨天积水反射的AFS光线(侧视)图2 雨天积水对AFS光线的反射(俯视)乡村道路的照明:在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。
afe的名词解释

afe的名词解释随着科技的不断发展和人们对数字化生活的追求,新的名词和术语层出不穷。
其中,AFE是一种常被提及的名词。
那么,AFE的具体含义是什么呢?在本文中,我们将对AFE进行详细解释,帮助读者更好地理解这一概念。
AFE,即Adaptive Front-lighting System的缩写,是一种车辆辅助系统,旨在提高驾驶者在夜间或有光线条件变化时的行驶安全性。
它主要通过可调节的前照灯照明方式,使驾驶者在道路上能够更清晰地看到周围环境,降低事故发生的风险。
AFE系统主要由以下几个组件构成。
首先是传感器,负责监测环境光照强度和车辆行驶速度等信息。
根据这些信息,系统可以自动调整前照灯的亮度和角度,确保驾驶者在任何光线条件下都能获得最佳照明效果。
其次是控制单元,它接收来自传感器的数据,并根据预设的算法进行实时计算和控制。
最后是前照灯模块,通过电动机等装置实现灯光亮度和角度的调整。
AFE系统的工作原理可以简单描述为以下几个步骤。
首先,传感器检测到周围的光线强度。
如果光线较强或速度较慢,系统会自动将前照灯的亮度调整到最佳状态,以避免视觉干扰和不适。
反之,当环境光线较暗或速度较快时,系统会增加前照灯的亮度,提供更清晰的照明效果。
在这个过程中,系统还可以根据车辆的转向角度和倾斜情况,调整前照灯的角度,确保驾驶者能够更好地看到道路上的障碍物和转弯。
与传统的固定亮度或手动调节前照灯相比,AFE系统的优势显而易见。
首先,它可以根据实际需要自动调整前照灯的亮度,无需驾驶者频繁干预,减轻了驾驶者的负担。
其次,AFE系统能够根据车辆速度和环境光照的变化实时调整前照灯的亮度和角度,提供更个性化和精准的照明效果。
这不仅可以提高驾驶安全性,还能减少驾驶者的视觉疲劳和不适感。
AFE系统的应用领域非常广泛。
除了在汽车行业中被广泛采用外,它在其他领域中也有着重要的应用。
例如,在航空和航海领域,也有一些类似的自适应照明系统被用于提高飞行员和船员的视觉体验和安全性能。
AFS自适应前照灯系统

AFS自适应前照灯系统(Adaptive Front-Loght System)一、功能根据车辆的行驶状况、路状以及天气来适时的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优照明表现。
二、工作原理及系统图AFS系统分为两大部分:1、前照灯光束高度自动控制系统2、智能AFS自适应前照灯系统1、前照灯光束高度自动控制系统前照灯点亮时,前照灯光束高度自动控制系统根据车辆的行驶状况,操作前照灯光束高度调节电动机。
AFS ECU根据高度控制传感器和各ECU的信号计算车辆状态的变化,然后ECU根据该信息控制前照灯光束高度调节电动机,以改变前照灯反射器角度。
2.智能AFS(自适应前照灯系统)智能AFS通过移动近光,在转向过程中保持大范围的近光照明及良好的视野。
智能AFS 采用中高速控制和低速控制。
在中高速控制过程中,系统根据转向角和转速计算目标光照角,并分别改变各近光前照灯的放置角。
在低速控制过程中,系统根据转向角计算目标光照角,并改变入弯侧近光前照灯的旋转角。
低速控制满足下死所有条件,AFS ECU执行低速控制·发动机正在运转·车辆正以10Km/H或更高的速度向前行驶·转向角为6º或更大·近光灯点亮·AFS OFF开关关闭旋转范围中速控制·发动机正运转·车辆正以30Km/h或更高时速前进·转向角为7.5º或更大·近光灯点亮初始化设定控制发动机起动时,AFS ECU驱动前照灯旋转执行器,将前照灯投射光束向车辆中间方向移至操作极限位置,然后使其返回到正常位置。
从而,AFS ECU估算进行基准控制的前照灯位置。
自适应前照明系统
五、自适应前照明系统的应用
• 奔驰E级LED智能照明系统具有5种发光模式,分别是乡村道路照明、 高速公路照明,增强型雾灯、主动转弯照明和弯道辅助照明。
2020/5/7
本章 小节
1、自适应前照明系统定义及组成 2、自适应前照明系统工作原理 3、自适应前照明系统功能 4、自适应前照明系统的应用
智能网联汽车技术
V2X ICV
Landar
5G
——冷却系统 ——自适应前照明
HD Map 系统
主讲人:
3课时
ADAS辅助驾驶系统
自适应前照明系统的定义及组成 自适应前照明系统的工作原理及功能 自适应前照明系统的应用
一、自适应前照明系统的定义
• 自适应前照明系统(AFS):根据天气情况、外部光线、道路状况 以及行驶信息,自动改变前照明系统的工作模式,调整照射光线 的光形,消除视野暗区,为驾驶员提供更宽范围、更为可靠的照 明视野,保证驾驶员和道路行人的安全
• (3)系统在前照灯初始化置位时,通过获取霍尔位置传感器的位置 信号,判断前照灯实际运行的角度与控制单元输出角度之间的误差, 如果误差不大,通过角度PD调节算法对误差进行调节;如果误差过大 ,说明前照灯出现了故障,系统会产生故障报警信号提醒驾驶员前照 灯出现故障
• (4)系统通过液晶显示装置实时显示系统的工作状态,包括车速状 态、转向盘转角状态、车灯转角状态等
2020/5/7
三、自适应前照明系统的工作原理
• (2)系统通过获取大灯开关器件信号和环境光强传感器的光照强度信号 ,对前照灯开关进行控制,系统会设置一个光照阈值,当光照强度小于阈 值时,系统自动延时打开前照灯;当光照强度大于阈值时,系统自动延时 关闭前照灯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静态自动调光;
动态调光(DHL)
仪表信号指示功能
远光近光控制模式
系统电源管理(Master和Slave)
故障诊断与Failsafe(Master和Slave)
负载故障诊断
控制器掉线诊断
失步检测和校正
基于CCP的标定接口(Master)
在线配置系统功能(Master和Slave)
在线升级控制软件
系统功能:
具有随动转向氙气大灯(HID)的光线照亮范围角度能够外侧旋转15°,内侧旋转7°。同时还能针对车速,以及汽车轴荷变化(载重量变化,加速和减速,上下坡等)情况来改变车灯上下的高度来保证合理的照射距离。不仅如此,AFS控制模块还能保证在颠簸路面和短时间的路面冲击下,前照灯照射距离不会进行频繁调整,以提高系统鲁棒性,防止驾驶员眼睛疲劳。
第一篇自适应前照灯控制系统(AFS)
自适应前照灯控制系统(AFS)
AFS能够根据汽车方向盘角度和车速,不断对大灯进行动态调节,适应当前的转向角,保持灯光方向与汽车的当前行驶方向一致,以确保对前方道路提供最佳照明并对驾驶员提供最佳可见度,从而显著增强了黑暗中驾驶的安全性。
系统结构:
AFS电子控制模块,包括一个Master和两个Slave。AFS主要是根据车辆和道路状况,来控制前照灯左右和上下的照射角度,从而提高驾驶员的视野,提升夜间驾驶的安全性。Master控制器以汽车方向转角、车速和前后轴高度等高速CAN总线信号或者真实传感器信号作为输入,经过复杂的控制逻辑和算法,得到期望的近光灯照射角度;并通过LIN总线发给左右两个Slave控制器,Slave再驱动电机来实现照射角度的实时动态变化。
除此之外,AFS还可以根据环境状况(如雨,雾)来适当的调整前照灯的角度。
在技术上,Master和Slave都具有Bootloader功能,实现控制程序和标定模块的在线升级和下载。AFS控制模块还可以根据不同地域,不同车型的要求,通过配置标定模块来实现所需要的不同功而改变角度(Bending Mode);
Ballast故障监测
第二篇自适应转向大灯系统(2008-08-06 17:24:58)
标签:汽车前照灯led模块大灯情感
智能驱动和控制技术为汽车行驶安全带来革命性变化作者:邹治永时间:2006-11-03来源:电子产品世界浏览评论汽车前照灯主要是用于汽车夜间行驶照明。它的亮度和照射方向对于行车安全是至关重要的。夜间汽车所有前照灯同时照明时,灯具应具有能使驾驶员看清前方100米距离以内交通障碍物的性能,照明光束应对准汽车的前进方向,主光轴方向应该偏下。前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰易见,或者给迎面驶来的汽车里的驾驶员造成眩目,妨碍视野,这些都是导致事故的重要因素。在2006广州车展上,人们看到新奥迪S8配置了创新的照明科技—带有LED日间运行灯的自适应前照灯。其加强型氙气前照灯配有静态转向灯和动态转弯灯以及独立的LED日间行车灯。雪铁龙新C5号称是世界上最安全的轿车之一,其双功能氙气转向大灯夜间能以左右15o的角度转动(转弯时外侧灯转动8o,内侧灯可转动15o),使您在转弯时能获得更佳的视野,从而提高行驶安全性。氙气灯与LED灯配合,标志着LED在提高汽车行驶安全性的应用中迈出了实质性的步伐,下面向你介绍智能驱动和控制技术为汽车行驶安全所带来的革命性变化。自适应转向大灯系统:具备向中低档车推广的技术基础自适应转向大灯系统位于前照灯单元内,介于日间行车照明系统及氙气灯模块之间。以奥迪A8为例,当车辆以低于70公里/小时的速度行驶时打开转向灯,或者当驾驶员将方向盘转到一个特定的角度时,它便会自动打开自适应转向大灯系统,在车辆完全变向之前对弯道进行照明。自适应转向大灯系统(AFS)的基本功能包括:*前照灯自动校平系统:在车辆倾斜的情况下保证灯光与路面呈水平状态,前照灯自动校平系统根据传感器的一系列数据,尤其是从前后车轴传来的悬架压缩数据调节各车灯的角度。*改变车灯光束的方向:自适应转向大灯系统通过对氙气前照灯实施电子控制来改变车灯光束的方向,从而使光线的分布与车辆的转向角相适应,以便于迎面而来的转弯和岔路口—尤其是司机的凝视点—能够得到最佳的照明。研究表明,当车辆转弯时,旋转前照灯光束能使司机凝视点的照明度提高300%。自适应转向大灯系统的基本构成包括:1.两台步进电机,分别控制大灯在水平和垂直方向的转动;2.步进电机的驱动及转换器件;3.电子控制单元(ECU);4.安装大灯的结构件;5.传递控制信号以及采集传感器数据的LIN总线,还有将传感器数据传递给其它控制单元的CAN总线。目前,在控制、传感和驱动方面,以AMI Semiconductor公司为代表,已经推出了AMIS-30621及AIMS-30623步进电机控制器集成电路,它们能够直接安装于自适应转向大灯系统机电一体化模块之中,通过LIN总线接口,既节省了布线成本,又拥有更好的电磁兼容性能。Vishay Intertechnology公司推出的新型环境光感应器,通过对外部环境光的感应,可以实现汽车前照灯的闭环控制。在汽车照明控制的ECU和车灯之间,需要采用MOSFET驱动器,为了防止输出过载的情况下,Supertex公司推出一款变频PWM控制器IC—HV9930,它可以实现电流限制,并通过电容隔离措施保护LED灯不受MOSFET开关失效的影响,适合于具备低压直流输出的汽车LED灯。在LED前照灯方面,斯坦利电气与德国海拉公司(Hella)联合开发了将4个大型LED芯片封装成一个大功率白色LED模块的方案,每个白色LED模块发出140流明亮度的光束,预计2008年前后将达到并超过HID灯的发光效率。日本小丝制作所推出的前照灯配备有11个白色LED模块,包括近光灯6个,远光灯时追加5个,近光灯点亮时的光束为800流明~1000流明,这种前照灯具有AFS功能,在弯道行驶时灯光照射角度转向汽车转弯方向,前照灯中部是可以转动的。此外,Avago和Lumileds推出三款了中等功率发光二极管产品—Envisium Power,该产品的主要应用之一就是前转向灯和车后组合转向灯。Osram Opto Semiconductorvs公司则推出了集内部和外部照明于一体的LED照明模块,目标是增强汽车的色彩和设计总体效果。Nichia甚至宣布,2007年将推出150流明/瓦的LED。上述情况表明,LED作为前照灯在提高汽车行驶安全性领域中的应用已经具备大规模普及的基本条件。智能驱动和控制技术:汽车LED照明市场的竞争热点在汽车照明系统中,高亮度LED(HBLED)具有广阔的应用前景(图1),它将使汽车照明更为智能化,为驾驶提供更多的安全,为汽车设计和消费者带来更多色彩斑斓的变化。图1 LED在汽车中应用的布局图自适应前照灯照明系统(AFS)为汽车根据环境的变化调整光线提供了一定程度的智能。早期的AFS采用的是氙气灯,目前,开发自适应前照灯系统的公司包括:Hella、Valeo和Visteon等等,随着LED模块亮度的大幅度提高,他们已经开始采用LED作为前照灯的光源。在美国,SAE标准组织已经批准将LED作为前照灯主要照明功能器件,欧洲可能最晚要到2008年才能由欧洲经济委员会(ECE)批准相应的标准。由于AFS的控制涉及的主要控制参数包括:道路弯度、道路类型、天气条件和驾驶员的需求,基本控制问题是何时调整光线的方向和亮度?如何优化弯道与汽车倾斜度之间的关系?AFS完全依赖软件算法实现电控,以往的开发过程中,车厂和AFS开发商之间要做长期的配合测试才能获得第一手数据,这种做法已经难以满足快速上市的需求。为了优化AFS的控制算法,在LED车灯设计方面,德国Brandenburg公司提供一种称为LucidShape的AFS仿真系统(图2)。图2称为LucidShape的AFS仿真系统LucidDrive是其中的一种夜间驾驶仿真工具,通过该工具可以分析汽车前照灯在真实路况中的性能,设计人员只要选择对测试路径、载荷、前照灯光束的位置进行设置之后,就可以开始仿真。在仿真过程中,你可以切换不同的灯组,并在驾驶过程中实时观察其影响,从而直接对各种前照灯设置进行比较,优化控制算法。LucidDrive支持动态选择汽车的前照灯、发光的参数和驾驶时的观察位置,所有的变化造成的影响可以立即反映出来,其中,还包含各种测试路面的模式,用户可以随时作出改变。通过反复测试,可以设计出光学性能优良、符合驾驶各种驾驶条件和适应各种路面状况的AFS光机电一体化系统。目前,支持自适应前照灯系统控制需求的半导体公司包括:Freescale、ST、ADI、AMIS、Hitachi、Melexis、Xilinx、Microsemi等公司,提供功率驱动器件MOSFET的公司则有ST、IR、Fairchild等公司。控制前照灯转动的步进电机驱动和控制集成电路的放置有两种方案:一是直接驱动,通过位于车内的中央控制单元(ECU)对步进电机进行控制;二是机电一体化驱动,通过采用高度集成