上海大学机电工程与自动化学院
上海大学机电工程与自动化学院钱晋武

凝聚优秀骨干教师的重点学科
日期
上海市高教局 第一期 1986年-1990年
上海市高教局 第二期 1991年-1995年
上海市教委 第三期(1996年-2000年)
上海市教委 第四期(2001年-2005年) 上海市重点学科 2000年-2003年 教育部重点学科 2001年-2005
序
学科名称
号
1
本统一, 建设11门学科基础主干课程) 强调网络教育平台建设(建成学院局域
网,服务多媒体网上教学)
三、加强实践教学培养学生动手能力
1、课内实践教学注重创新性、设计性、综合性实验 2、课外科技活动注重研究和创新能力培养
学术导师模式 学科竞赛模式(三大机器人比赛系列等)
3、制度保障 获奖奖励 科研折算课程设计学分 4、教师自主开发(或参与设计)创新实验平台
精密机械工程系
1994.5
上海大学 机械电子工程学院
1999.5
上海大学机电工程与自动化学院 (设机械自动化系,精密机械工程系,自动化系)
1994.5
上海大学 自动化学院
学科专业现状
专业现状 两大平台:机械工程/电气工程 七个本科专业:
机械工程及自动化、电气工程及其自动化、自 动化、测控技术与仪器、工业工程、包装工程、 工业设计 主要涉及四个一级学科:机械工程、电气工程、 仪器科学与技术、控制科学与工程 6个博士学位授予点/十一个硕士学位授予点 教育部、上海市、市教委重点学科建设单位
一项; 全国大学生电子设计竞赛 一等奖三项,三等
奖一项。
五、注重课外,探索全面学分 制下的学生培养
发挥组织作用:党员核心小组 发挥老师作用:导师制 发挥社团作用:机器人学生分会等 发挥学生作用:学生成才沙龙
上海大学机械自动化系导师介绍

固耦合系统建模、试验台架设计及测试,研究摩擦副间的润滑及工作机理;
旋转类机械的转子系统动力学分析,涉及理论建模仿真及相关实验测试;
基于生物力学基础的人—机耦合系统分析。
研 究 机械设计、计算机辅助分析、机 招 生 要 勤奋好学,最好 CET6 已过
方向 电系统驱动及控制、环境能量收 求
集与利用、振动利用技术
产学研合作关系。
研究领域:机电控制、动态分析与仿真、计算机辅助测试、计算机集成制造;目前在研的
项目包括:计算机测控集成模块开发、大型养路机械测控系统研制、新型节能液压元件及系统
开发。
金健 讲师
张健滔 副教授
研 究 流体润滑
招 生 要 本专业,刻苦勤奋,自律性强
方向
求
滑动轴承的流体动力润滑理论的研究,涉及计算流体力学、传热学及固体弹性力学,液-
为工厂产品(工业非标产品)或市场商品(终端产品),有诸多外观专利并撰写了用于机械工程
大类下的工业设计专业培养基本完备的教材一套,为若干大学作为主干课程使用,在产品设计过
程中对材料、成本、后处理等方面的应用有较成熟的经验.
本人对具有严谨的工程思维、浪漫的艺术才气和萌动着创新意念的青年抱有好感,如果你是,
研究生课程教学工作(微机接口与控制专题和机械工程测试、信息、信号处理测试等课程),并
担任主讲多门本科生教学课程工作。本人已经连续主带了 8 届硕士研究生工作,已毕业的五届
硕士研究生的硕士论文的评审质量都达到了优良。全部顺利通过硕士论文答辩。现担任上海市
互换性协会委员、秘书长。
金侠杰 高工
研 究 机电控制、机械系统设计、计算 招 生 要 动手能力强、踏实肯干、
严良文 副教授
研究方向
支持多种现场总线协议的现场智能单元研究与开发
支持多种现场总线协议的现场智能单元研究与开发R&D of Smart Field Unit Based on Fieldbus Multi-protocol谢志冰 费敏锐 赵维琴(上海大学机电工程与自动化学院,上海 200072)摘 要阐述了实现一种支持Modbus/TCP工业以太网、DeviceNet和Profibus-DP现场总线等3种工业通信网络协议的智能化现场节点的设计思想,并给出了软、硬件和通信接口的设计要点。
该现场智能单元运行稳定、可靠,具有应用和推广的前景。
关键词现场智能单元多协议现场总线Abstract The developing strategy of a kind of field intelligent unit based on three kinds of industrial communication networks and fieldbus protocols including MODBUS/TCP, DeviceNet and Profibus-DP is described. Its design outline of software, hardware, network and fieldbus interface is given. The experiment and application show that the smart field unit is stable, reliable and has a bright future in its application and popularity.Keywords Smart field unit Multi-protocol Fieldbus0 引言现场总线控制系统的逐步推广和发展,对底层的测量仪表也提出了很多新的要求。
现场智能单元就是一款网络化智能仪表,它继承了传统智能仪表的优点,同时增加了现场总线双向通信功能。
上海大学机电工程与自动化学院 导师介绍

方明伦 (男),上海大学终身教授。
专业:机械制造及其自动化。
主要研究领域:计算机集成制造系统、制造系统自动化和机器人研究及应用开发。
现任上海市机械自动化及机器人重点实验室主任、上海机器人研究所所长、上海大学CIMS中心主任、上海大学学术委员会主任、上海大学学位委员会副主任、上海市机器人学会会长、上海市机械工程学会副会长、全国高校机械制造及自动化学会副会长、国务院学位委员会机械学科评议组成员。
曾任教育部第一、二、三届科技委委员,国家“863”计划第一、二、三届CIMS主题中的“质量控制”专题和“先进制造及自动化”专题专家组成员。
主持研制“上海二号工业机器人”并获上海市科技进步一等奖;主持研制“上海五号工业机器人”并获上海市科技振兴一等奖;“桑塔纳汽车汽缸盖浇注模” 获上海市科技进步三等奖。
“以机电一体化高新技术改造传统的机械专业” 获上海市优秀教学成果二等奖。
曾获“国家有突出贡献的中青年专家”的荣誉称号,上海市劳动模范、上海市高校优秀导师。
至目前已培养20余名博士生获得工学博士学位,五十余名硕士生获得工学硕士学位。
目前承担和参与的项目:国家自然科学基金项目:“一种新的制造过程多目标化理论与方法的研究”;上海市重点基础攻关项目“基于快速成型技术的仿生组织制造方法研究”;国家“863”计划和上海市科委的“服务机器人”和“机器人关键部件”项目;企事业委托项目多项。
联系方式:021‐56333060; 021‐56331235通信地址:上海市延长路149号上海大学校办(200072)龚振邦 (男),教授。
专业:机械电子工程、精密机械。
主要研究领域:先进机器人技术与精密工程。
现任上海大学精密机械研究所所长、微机械技术研究中心主任。
他曾是“国际先进机器人计划”(IAPP, International Advanced Robotics Program)合作协调委员会委员,国家教育部第四届科技委员会工程技术学部一部委员,国家自然科学基金委工程和材料学部机械学科第八届评审专家组组长,国家863计划智能机器人主题第二、三、四届专家组专家,国家863计划微机电系统发展战略研究专家组副组长。
2.7 与或图法知识表示与问题求解
(111) (122)
(122) (322)
(322) (333)
(113) (111)
(123) (113)
(122) (322) (321) (321) (331) (123)
(333) (331)
自动化系仪自教研室
2.2.6 问题归约法
[例]求解不定积分
A B C A B
1 1 2 3 1
1 C
自动化系仪自教研室
2
3
2.2.6 问题归约法
归约过程 (1)移动圆盘A和B至柱子2的双圆盘难题;
A B C
1
2 1 (111)
3
C
1 A
B
2 1 (122)
3
自动化系仪自教研室
2.2.6 问题归约法
(2)移动圆盘C至柱子3的单圆盘难题;
1 A
B C
2 1 (122)
自动化系仪自教研室
6.2.4 基于与或图的搜索
与或图的基本概念回顾
与树:当把一个复杂问题分解为若干个子问题时, 可用一个“与树”来表示这种分解。 或树:当把一个复杂问题变换为若干个与之等价的 新问题时,可用一个“或树”来表示这种变换。
A
A
B
C
D
B
C
23 或图自动化系仪自教研室
与图
6.2.4 基于与或图的搜索
2.2.6 问题归约法
本原问题:
指那种不能或不需要再进行分解或变换,且可以直 接解答的问题。 归约: 把一个复杂问题分解或变换为一组本原问题的过程。 问题的分解:是指把一个复杂问题分解为若干个子问题的过程。
问题的解是所有子问题解的“与”,即只有当所有子问题都有解时, 原问题才有解。
智能制造技术与应用研究中心-上海大学机电工程与自动化学院
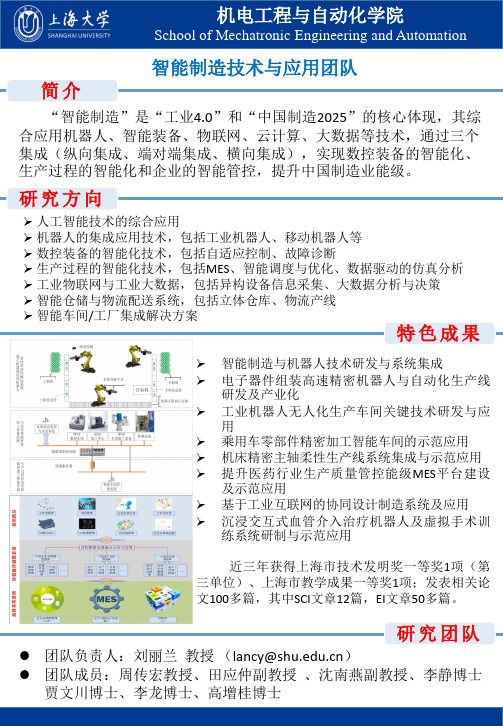
智能制造技术与应用团队
“智能制造”是“工业4.0”和“中国制造2025”的核心体现,其综合应用机器人、智能装备、物联网、云计算、大数据等技术,通过三个集成(纵向集成、端对端集成、横向集成),实现数控装备的智能化、生产过程的智能化和企业的智能管控,提升中国制造业能级。
人工智能技术的综合应用
机器人的集成应用技术,包括工业机器人、移动机器人等
数控装备的智能化技术,包括自适应控制、故障诊断
生产过程的智能化技术,包括MES、智能调度与优化、数据驱动的仿真分析
工业物联网与工业大数据,包括异构设备信息采集、大数据分析与决策
智能仓储与物流配送系统,包括立体仓库、物流产线
智能制造与机器人技术研发与系统集成
电子器件组装高速精密机器人与自动化生产线
研发及产业化
工业机器人无人化生产车间关键技术研发与应
用
乘用车零部件精密加工智能车间的示范应用
机床精密主轴柔性生产线系统集成与示范应用
提升医药行业生产质量管控能级MES平台建设
及示范应用
基于工业互联网的协同设计制造系统及应用
沉浸交互式血管介入治疗机器人及虚拟手术训
练系统研制与示范应用
近三年获得上海市技术发明奖一等奖1项(第
三单位)、上海市教学成果一等奖1项;发表相关论
文100多篇,其中SCI文章12
篇,EI文章50多篇。
●团队负责人:刘丽兰教授(lancy@)
●团队成员:周传宏教授、田应仲副教授、沈南燕副教授、李静博士
贾文川博士、李龙博士、高增桂博士。
氩弧焊原理
特种氩弧焊机电源的实现
上海大学机电工程与自动化学院 上海 9 8 : : : ; 9 <
!
" # $ % & ’ $ ( & ) *) + ,) . # /0 1 2 2 % 3+ ) /0 2 # 4 & $ % , / 5 ) *6# % 7 # /
姚 青
摘 要 > 讨论了一种用于氩弧焊机的电源系统 ?该系统解决了现有焊接电源存在的引弧困难 @ = 电流控制精度低等 问题 A 电源 随工 控 机 控制 的 给 定焊 接 电 流 参 数 而 变 化 B 提 高 了 设 备 的 自 动 化 程 度B 扩大了焊接参数的可调范围 B 降低了焊接电流硬件的复杂程度 ?实践证明 B 整个系统设计合理 @ 操作方 便B 完全满足焊接技术的要求 ? 关键词 C 特种氩弧焊机 B 工控机 B 焊接电源 = > FG Z[ , D E ( / $ 4 ( H IJ K L M G G N OP H K L G J Q R S N S K T H UIJ N V J K R L V J W J N H G J VR UX Y J G S G J K Y R L L O L X J \Q S U Z[ L H N W JX Y JG K H ] N J \H PG K H V M Q R U TJ N J Q X K R QS K QS U VQ H U X K H N N R U TX Y JG K J Q R L R H UH PJ N J Q X K R QQ M K K J U X Y J IJ N V R U TG H IJ KIR N N Q Y S U T JIR X YX Y JG S K S \J X J K LH PIJ N V R U TJ N J Q X K R QQ M K K J U XT R W J U] OX Y JR U V M L X K R S N BS Q H \G M X J K U VR X S N L HR \G K H W J L X Y J V J T K J J H P S M X H \S X R H US U VR U Q K J S L J L X Y J S V ^ M L X R U TK S U T J H P IJ N V R U T BS Z[ G S K S \J X J K L U VK J V M Q J LX Y JQ H \G N J _ R X OH P X Y JY S K V IS K JH P IJ N V R U TJ N J Q X K R Q R X O Y JG K S Q X R Q JG K H W J L Z X Y S X X Y JQ H U X K H N L O L X J \ IH K ‘ LIJ N N S U V\J J X LX Y JK J a M J L X H P X Y JIJ N V R U TX J Q Y U H N H T OP M N N O C BR BIJ b# 3 . ) / 7 E L G J Q R S N S K T H UIJ N V J K U V M L X K R S N Q H \G M X J K N V R U TG H IJ K L M G G N O
上海大学机械设计大作业:螺旋起重器(千斤顶)设计

目录一、确定螺纹牙型及螺纹基本尺寸..................................... ........... .. (3)1.1螺纹牙型的选择............................................................. ........... ..................... (3)1.2螺纹基本尺寸.................................... ......................................... ...... . (3)二、螺杆的设计计算...................................................... ........... ..................... ... . (3)2.1材料......................................................... ........... .. (3)2.2螺杆结构................................................. ........... ...... ........... . (3)2.3自锁性校核................................................ ........... .................... ... ... (4)2.4强度校核.......................................... .......... ........... ..................... (5)2.5稳定性校核................................................... ........... ................................ ..6三、螺母的设计计算.................................................. ........... ................. ...... . (7)3.1材料...................................................... ......... ..................... ... ... ...... ... . (7)3.2螺纹牙工作圈数z...................................... ........... ........................... ....... .73.3螺母的结构尺寸........................................... ....................... ... ...... .. (7)3.4螺纹牙强度校核............................................ .. . (8)3.5螺母悬置部分强度和螺母凸缘强度校核....... ......................................... .9四、托杯的设计计算..................................................... ........... ............... (10)五、手柄的设计计算.................................................. ........... ............. .................. .115.1材料.............................................................. ........... ........... .................. (11)5.2手柄长度................................. .............. ........... ...................... ................ .125.3手柄直径.............................. ................. ........... ...................... ............... ..125.4手柄结构.............................................. ........... ........... ....................... ..... .12六、底座的设计计算............................... ........... ........... ..................... ............. . (13)6.1材料.............................. ........ ........... ........... ........................... ............. (13)6.2底座结构.................................. ........... ........... ........................... (13)七、螺旋起重器(千斤顶)效率.................... ........... ........... ........... ......... .. (14)八、装配工作图............................. ........... ........... ........... (15)所示。
上海大学机电工程及其自动化-薄壁圆筒磨边机的结构设计论文
上海大学机电工程及其自动化-薄壁圆筒磨边机的结构设计论文毕业设计(论文)题目: 薄壁圆筒磨边机设计学院机电工程与自动化学院专业(层次) 机械工程及自动化(专升本、本)年级2012级班级专升本学生姓名祝佳陶学号124A0577指导教师金健目录摘要 (1)Abstract (2)第一章绪论 (3)1.1磨削加工的特点概述 (3)1.2砂轮磨削国内外的发展与趋势 (3)1.2.1国外的发展 (3)1.2.2国内的发展 (4)1.2.3发展趋势 (4)1.3砂轮磨削的关键技术 (5)1.4课题设计思路 (5)1.5课题设计结构 (5)1.6课题研究的目的及意义 (5)第二章薄壁圆筒磨边机的总体设计方案 (7)2.1驱动方案的确认 (7)2.1.1液压驱动 (7)2.1.2气压驱动 (7)2.1.3电动机驱动 (8)2.1.4驱动方案的确认 (8)2.2砂轮主轴箱升降机构方案的确认 (8)2.3主轴机构结构方案确认 (9)2.4圆筒夹紧机构的确认 (9)2.5整机方案的确认 (10)2.6本章小结 (11)第三章薄壁圆筒磨边机磨边砂轮主轴的计算 (12)3.1驱动电机的选择 (12)3.2转速图的拟定 (12)3.3传动轴的估算 (13)3.4齿轮模数的估算 (15)3.5各轴结构的设计 (16)3.6主轴组件的刚度和刚度损失的计算 (17)3.7齿轮强度校核 (18)3.8传动轴挠度的验算 (19)3.9本章小结 (20)第四章薄壁圆筒磨边机夹紧机构的设计计算 (21)4.1拟定技术参数 (21)4.2滚珠丝杠的计算及选择 (21)4.3滚珠丝杠支承轴承的选择 (23)4.4滚珠丝杠的校核 (25)4.4.1临界压缩负荷 (25)4.4.2临界转速 (26)4.4.3滚珠丝杠拉压振动与扭转振动的固有频率 (26)4.4.4滚珠丝杠扭转刚度 (28)4.4.5滚珠丝杠传动精度计算 (29)4.5滚珠丝杠进给传动系统变形计算 (29)4.5.1滚珠丝杠精度计算 (30)4.6伺服电机的选择与计算 (32)4.6.1进给伺服电机的校核 (34)4.7联轴器的选择 (35)4.8本章小结 (35)第五章薄壁圆筒磨边机主轴提升机构的设计 (36)5.1拟定技术参数 (36)5.2滚珠丝杠的计算及选择 (36)5.3伺服电机计算及选择 (36)5.4立柱的设计 (36)5.4.1按立柱外形分类 (36)5.4.2材料分类 (36)5.4.3立柱结构的选择 (37)5.5本章小结 (37)第六章结论 (38)参考文献 (40)致谢 (42)薄壁圆筒磨边机设计摘要据经济合作与发展组织日前发布报告称,世界石油需求快速增长,原因是新兴经济体石油消耗不断增长,纽约——美国能源情报署预测,今年全球石油需求将增加1.2%至万桶/日。
基于电流矢量的三电平逆变器死区和管压降补偿策略
基于电流矢量的三电平逆变器死区和管压降补偿策略宋文祥;张旭【摘要】在电机控制过程中,死区和管压降的存在导致逆变器输出波形畸变.为了消除电压和电流的畸变,死区和管压降补偿是必要的.本文给出了一种简洁高效的三电平电压型逆变器死区补偿方法,用以改善电机的输出波形,详细分析了死区产生机理,利用电流矢量对死区进行准确补偿.根据PWM状态和电流矢量的位置分析功率器件压降的变化,结合电流方向进行补偿.最后基于F2812DSP芯片的三电平逆变器实验平台对该方法进行了开环和闭环实验研究,验证了理论分析的正确性和实际可行性.%In order to prevent the output waveforms distortion due to dead-time and forward voltage, we must add the dead-time and forward voltage compensation in the process of motor control. This paper introduced a simple and efficient dead-time compensation method for three-level inverter to improve output waveforms. The cause of dead-time was analysed in detail, and dead-time can be compensated accurately using current vector. We analyse the changes in forward voltage of power devices based on PWM state and the position of current vector, and then compensate according to the current direction. Finally open and closed loop experiments are done to prove the proposed strategy through experiment on a three-level model inverter developed with F2812DSP. We can prove that the analysis is correct and the method can be used in practice.【期刊名称】《电工电能新技术》【年(卷),期】2012(031)002【总页数】5页(P47-51)【关键词】三电平逆变器;死区补偿;管压降补偿;电流矢量【作者】宋文祥;张旭【作者单位】上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072【正文语种】中文【中图分类】TM4641 引言为防止逆变器桥臂直通,必须在同一桥臂互补的触发信号中加入死区,以保证同桥臂上开关管可靠关断后,与之互补的开关管才能导通。
三种高分辨率DPWM 产生方法的分析和比较
三种高分辨率DPWM产生方法的分析和比较徐妍萍高艳霞邢淞上海大学机电工程与自动化学院,上海200072Email:Email:gaoyanxia@摘要数字脉宽调制(DPWM)是数字开关电源控制的关键。
为了满足输出电压精度,避免极限环现象,必须在合理的时钟频率下实现高分辨率DPWM。
本文分别采用延迟线法、Delta-Sigma法及混合法,在32MHz硬件时钟频率情况下,基于FPGA实现了11位的高分辨率DPWM。
文中论述了三种方法的基本原理,并分析了各自的优缺点,最后给出了实验结果,比较了三种方法对输出电压的稳态性能、动态性能的影响。
关键词数字脉宽调制(DPWM);高分辨率;延迟线;Delta-Sigma;混合法Analysis and Comparison of Three Implementation Methodologiesfor High-Resolution DPWMXU Yanping GAO Yanxia XING Song1)2)3)College of Mechatronics Engineering and Automation,Shanghai University,Shanghai,200072Email:gaoyanxia@Abstract:The digital pulse-width modulator(DPWM)is a crucial module for digital controlled switching mode power supply(SMPS).A high-resolution DPWM must be implemented under a reasonable clock frequency in order to satisfy the precision of the output voltage and avoid limit cycles.In this paper,an11-bit high-resolution DPWM is realized based on FPGA under a32MHz hardware clock frequency with the Delay-Line,the Delta-Sigma and the Hybrid respectively adopted. The basic principles of the three methodologies are described and the advantages and disadvantages of them are analyzed. Finally,the experimental results are given,by which the effects of the three methodologies on steady-state and dynamic performances are compared.Key words:digital pulse-width modulator(DPWM),Delay-Line,Delta-Sigma,Hybrid,high-resolution1.引言目前,低成本、高性能的小功率DC-DC变换器在便携式产品中得到越来越广泛的应用。
2.3 产生式法知识表示与问题求解

自动化系仪自教研室
21
2.2.2 产生式知识表示法
➢ 2.2.2.4 产生式系统的应用举例 例-动物识别系统
这是一个用以识别虎、金钱豹、斑马、长颈鹿、企鹅、驼鸟、信天翁等7种动 物的产生式系统。为了实现对这些动物的识别,该系统建立了如下规则库:
R7: IF 该动物是哺乳动物 R8: IF 该动物是哺乳动物
自动化系仪自教研室
16
2.2.2 产生式知识表示法 ➢ 2.2.2.2 产生式系统的组成
推理机
推理机(Inference Engine) 选择匹配
规则库
综合数据库
冲突消解 执行操作
产生式系统的基本结构
终止推理
路径解释
自动化系仪自教研室
17
2.2.2 产生式知识表示法
➢ 2.2.2.3 产生式系统的推理策略
自动化系仪自教研室
24
2.2.2 产生式知识表示法
➢ 2.2.2.4 产生式系统的应用举例 例-动物识别系统
这是一个用以识别虎、金钱豹、斑马、长颈鹿、企鹅、驼鸟、信天翁等7种动 物的产生式系统。为了实现对这些动物的识别,该系统建立了如下规则库:
R14: IF 该动物是鸟 R15: IF 该动物是鸟
自动化系仪自教研室
10
2.2.2 产生式知识表示法 ➢ 2.2.2.1 产生式表示知识的基本方法
❖ 与蕴涵式的主要区别
蕴涵式表示的知识只能是精确的,产生式表示的知 识可以是不确定的
原因是蕴涵式是一个逻辑表达式,其逻辑值只有真和假
蕴含式的匹配一定要求是精确的,而产生式的匹配 可以是不确定的
原因是产生式的前提条件和结论都可以是不确定的,因此其匹 配也可以是不确定的
自动化系仪自教研室
2.3 传递函数 2.4 典型环节的传递函数

sX o (s)
+
k A2 R
X o (s)
=
sX i (s)
得到传递函数
G(s) = X o (s) = s = Ts
Xi (s)
s
+
k A2R
Ts +1
T = A2R k
由上面传递函数形式看出,液压阻尼器是包含有惯性环 节和微分环节的系统,称之为具有惯性的微分环节。
若|Ts|<<1时,G(s)≈Ts,系统近似成为理想微分环节。
如果对微分方程进行拉氏变换,得到代数方程(复数域), 将使解算简化而方便。传递函数是在拉普拉斯变换基础上产生 的,可以用来方便直观地描述零初始条件下的单输入单输出系 统,是对元件及系统进行分析、研究与综合的有力工具。
根据传递函数在复平面上的形状可以直接判断系统的动态 性能,找出改善系统品质的方法。传递函数是经典控制理论的 基础,是极其重要的基本概念。
得到系统(或环节)传递函数的一般形式
G(s) =
X o (s) Xi (s)
=
bmsm + bm−1sm−1 + L+ b1s + b0 ansn + an−1sn−1 + L+ a1s + a0
由此可知,只要知道系统微分方程,就可求出其传递函
数。
上海大学 机电工程与自动化学院
2.3 传递函数
2.3.3 传递函数的特点
微分环节的方框图
因此,理想微分环节的传递函数为
微分环节的 时间常数
G(s) = X o (s) = Ts
Xi(s)
Ts
Xo(s)
Xi (s)
当输入量为阶跃函数时,理论上输出量将是一个幅值为
二阶系统与主导极点

c(t ) a a j e
j 1
q
p jt
2 k k t bk2 ck e sin( k 1 k2 t k ) k 1
r
(衰减系数pj、kk ) 极点距虚轴的距离决定了其所对应的暂态分量衰 减的快慢 距离越远衰减越快 减的快慢,距离越远衰减越快;
调节时间ts
t
调节时间
c(t ) 1 1 1 2 e nt sin(n 1 2 t )
n t
1 e
/ 1
2
ts
4
n
3
ts
n
实际的ωnts—ξ曲线
性能指标与闭环极 点的关系
ts 4
越大,超调量越大
n
/ 1 2
C ( s ) b0 s m b1s m 1 ... bm 1s bm G (s) R ( s ) a0 s n a1s n 1 ... an 1s an K ( s zi )
i 1 n j m
nm
K b a
0 0
( s p ) (s p ) ( s
q
p jt
2 k k t bk2 ck e sin( k 1 k2 t k ) k 1
r
Hale Waihona Puke 1)高阶系统的单位阶跃响应由一阶和二阶系统的 响应函数叠加而成。 2)如果所有闭环极点都在 s 平面的左半平面,则随 着时间t→∞,c(∞)=a。,系统是稳定的。 3)极点的性质决定瞬态分量的类型; )极点的性质决定瞬态分量的类型 实数极点非周期瞬态分量; 共轭复数极点阻尼振荡瞬态分量。 阻尼振荡瞬态分量
系统零点分布对时域响应的影 响
上海大学机电工程与自动化学院2023年考研复试科目及参考书目

上海大学机电工程与自动化学院2023年考研复试科
目及参考书目1500字
上海大学机电工程与自动化学院2023年考研复试科目及参考书目
2023年考研复试科目:
1. 机械工程学科基础面试
2. 机械工程学科专业面试
科目一:机械工程学科基础面试
1. 理论力学
2. 材料力学
3. 热处理技术与工艺
4. 机械设计基础
5. 控制工程基础
6. 机械CAD/CAM基础
7. 机电一体化技术基础
8. 其他相关工程学科基础知识
科目二:机械工程学科专业面试
1. 机械设计与理论
2. 机电系统与自动化
3. 制造工程与自动化
4. 先进制造技术及装备
5. 先进机器人技术
6. 自动化控制工程
7. 液压与气动传动控制
8. 机械工程实验技术与数据处理
参考书目:
1. 《理论力学》马达根
2. 《工程热力学》吴文儒、陈北平
3. 《机械设计基础》蔡华宇、徐庆南
4. 《自动控制理论基础》刘保荣
5. 《计算机辅助设计与制造》白小凡
6. 《机械工程制图基础》王卫南、王东霞
7. 《机电一体化技术基础》沈庆江、袁均良
8. 《机器人学与控制工程》吴元顺、刘洪泉
9. 《液压与气动传动控制工程》冯玉祥、高普林
10. 《机械科学基础》张乃平、张志远
以上是上海大学机电工程与自动化学院2023年考研复试科目及参考书目的一份简要介绍,希望能对你有所帮助。
如需了解更多详细信息,建议咨询上海大学机电工程与自动化学院官方网站或拨打咨询电话进行确认。
上海大学机电工程与自动化学院简

上海大学机电工程与自动化学院简介学院愿景:科技创新的源泉,工科人才的摇篮,产学研与国际合作的平台。
学院宗旨:面向经济发展,培养创新人才,推动科技进步,服务社会需求。
学院文化:以人为本、团结协作、脚踏实地、开拓进取。
学院作风:与时俱进、求真务实、昂扬向上、争创一流。
机电工程与自动化学院是一个机、电、测、控多学科交叉的学院,下设精密机械工程系、机械自动化工程系、自动化系、工程技术训练中心、无人艇研究院和新型显示技术及应用集成教育部重点实验室。
教学科研涵盖机械工程、控制科学与工程、仪器科学与技术、电气工程四个一级学科。
拥有9个本科专业;4个一级学科硕士点,16个二级学科硕士点;3个一级学科博士点,15个二级学科博士点;3个博士后科研流动站。
学院现有在校本科生2060余名,硕士研究生、博士研究生2000余名。
学院拥有上海市电站自动化技术重点实验室、上海市智能制造及机器人重点实验室、教育部新型显示技术与系统集成重点实验室、海洋智能无人装备教育部工程研究中心、复杂网络化系统智能测控与应用学科创新引智基地(“111”引智基地)、TFT LCD关键材料和技术国家工程实验室、上海市平板显示工程技术研究中心、上海智能无人艇系统工程技术中心、上海市教委智能装备技术重点实验室、上海市教委自动化制造装备及驱动技术工程研究中心、上海市上海机器人研究所等11个省部级研发基地,以及教育部、上海市教委工程训练实验教育示范中心等教学实践基地;拥有上海大学-华中科技大学快速制造工程中心、上海大学精密机械研究所、上海大学网络化控制研究中心等多家校级研发基地;以及上海机器人产业技术研究院、能源与自动化联合实验室(中英科学桥合作伙伴)、上海大学-南瑞集团智能电网新技术联合研发中心、智能制造与机器人创新实验室、上海大学-Creaform医疗3D数字化示范实验室、上海大学中瑞微系统集成技术中心、上海大学-上海质检院智能机电装备检测技术联合研究中心等联合研发基地。
根据拉普拉斯变换的微分定理
两 e jt cost jsin t
式
f
(t)
0 sin
t,
t0 t0
相 减
e-jt cost jsin t
由欧拉公式,正弦函数表达为:sin t 1 e jt e-jt
2j
其拉普拉斯变换为:
L sin t sin t estdt 1 e jt e-jt estdt
(b) 当s=-pj时,G(s)→∞,则sj=-pj称为G(s)的 极点 。
分母为零
上海大学 机电工程与自动化学院
2.2.1 复数和复变函数
例:
当s= +j时,求复变函数G(s) =s2+1的实部u和虚部v。
解:
G(s)=s2+1=( +j)2 + 1 = 2 + j(2 ) - 2 + 1
使积分式绝对收敛,故Res >a是拉普拉斯变换的定义域, a称 为收敛坐标。
上海大学 机电工程与自动化学院
2.2 拉普拉斯变换
2.2.3 典型时间函数的拉普拉斯变换
(1) 单位阶跃函数
单位阶跃函数定义:
1(t)
0, 1,
t0 t0
其拉普拉斯变换为:
L 1(t)
1(t
fns的拉氏反变换很容易由拉氏变换表查得那么当fs不能很简单地分解成各个部分之和时可采用部分分式展开将fs分解成各个部分之和然后对每一部分查拉氏变换表得到其对应的拉氏反变换函数其和就是要得的fs的拉氏反变换ft函数
2. 数学模型与传递函数
2.2 拉普拉斯变换
系统的数学模型以微分方程的形式表达输出与输入的关 系。经典控制理论的系统分析方法:时域法、频域法。