2012年青岛理工大学考研真题 821 自动控制原理
青岛科技大学826机械设计2012年考研真题

图5
C)静应力D)对称循环变应力
二、填空题(1小分)在齿轮传动的设计和计算中,对于下列参数和尺寸应标准化的有;应圆整的有;没有标准化的也不应圆整的有。
(1)斜齿圆柱齿轮的法面模数 (2)斜齿圆柱齿轮的端面模数
(3)分度圆直径 (4)齿顶圆直径 (5)齿轮宽度B
5.简述轴的设计步骤。
四、分析、计算题(共40分)
1.(15分)已知普通螺栓连接的预紧力 N,螺栓刚度 kN/mm,被连接件刚度 kN/mm,试在图中作出螺栓连接的受力变形线图(以横坐标代表变形、纵坐标代表力);若螺栓连接在轴向外载荷 的作用下,伸长了 mm,试在图中准确的标出螺栓总拉力 ,外载荷 ,残余预紧力 。
A)制造困难B)要使用较长的销轴
C)不便于装配D)链板要产生附加的弯曲应力
6.如图3所示齿轮传动,轮1为主动轮,则轮2的齿面接触应力按变化。
A)对称循环B)脉动循环C)循环特性 D)循环特性
图3
7.巴氏合金通常用于作滑动轴承的。
A)轴套B)轴承衬C)含油轴瓦D)轴承座
8.两相对滑动的接触表面,依靠吸附油膜进行润滑的摩擦状态称。
2.V型带传动在工作过程中可能出现打滑现象,有人说这就是影响V带传动效率的主要原因,你同意这一观点吗?请说明理由。
3.齿轮传动中的载荷系数 为四个系数的乘积, ,分别说明 和 的名称及引入该系数是为了考虑哪些方面的影响?齿顶修缘、轮齿的螺旋角修形(鼓形齿)目的各是什么?
4.试分析比较滚动轴承、液体润滑滑动轴承、不完全液体润滑滑动轴承的特点及应用(提示:从摩擦系数的大小、工作转速的高低、是否可用于频繁启动的场合、承受冲击载荷的能力、回转精度等方面进行论述)。
【青岛大学2012年考研专业课真题】机械控制工程基础2012
ma x ,并计算当相位裕量为最大值 max 时,系统的开环截止频率 c 和增益
Kc 。 (20 分)
2
R( s )
K c (1 Βιβλιοθήκη 1 ) sKs 1 Ta s
1 Ti s
C ( s)
七.设系统的开环传递函数为 GK ( s)
K (T2 s 1) (其中K 0, T1 0, T2 0) s 2 (T1 s 1)
试画出 Nyquist 图, 并确定系统的稳定性。 (要求: 按 T1 T2 ,T1 T2 ,
T1 T2 三种情况分别讨论) 。 (30 分)
八.一单位反馈系统的开环传递函数为
G( s)
K s(1 0.2s)(1 0.05s)
求: (1) K 1 时系统的相位裕度和幅值增益裕度。 (10 分) (2)要求通过增益 K 的调整,使系统的增益裕度为 20dB,相位裕度 满足 40 。 (10 分)
青岛大学 2012 年硕士研究生入学考试试题
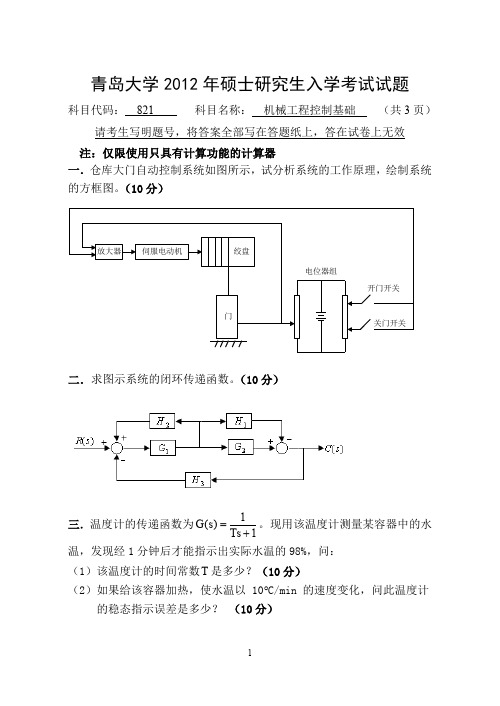
科目代码: 821 科目名称: 机械工程控制基础 (共 3 页) 请考生写明题号,将答案全部写在答题纸上,答在试卷上无效 注:仅限使用只具有计算功能的计算器 一.仓库大门自动控制系统如图所示,试分析系统的工作原理,绘制系统 的方框图。 (10 分)
放大器
伺服电动机
1
四. 如图所示的单位反馈随动系统, K 16s 1 ,T 0.25s ,试求:
(1)求特征参数 , n ; (5 分) (2)计算最大超调量和调整时间; ( 2% ) (5 分) (3)若要求最大超调量为 16%,当 T 不变时 K 应当取何值?(10 分)
五.系统的结构图如图所示,试求
青岛理工大学812自动控制原理2015-2019年考研专业课真题试卷
青岛理工大学2015年考研专业课真题试卷(原版)
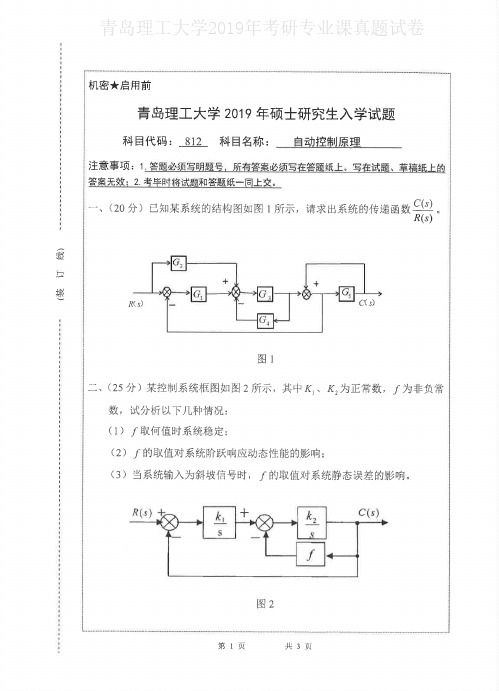
青岛理工大学2019年考研专业课真题试卷
青岛理工大学2019年考研专业课真题试卷
青岛理工大学2019年考研专业课真题试卷
青岛理工大学2018年考研专业课真题试卷(原版)
青岛理工大学2018年考研专业课真题试卷原版)
青岛理工大学2017年考研专业课真题试卷(原版)
青岛理工大学2017年考研专业课真题试卷(原版)
青岛理工大学2017年考研专业课真题试卷(原版)
青岛理工大学2016年考研专业课真题试卷(原版)
青岛理工大学2016年考研专业课真题试卷(原版)
青岛理工大学2015年考研专业课真题试卷(原版)
青岛理工大学2015年考研专业课真题试卷(原版)
【青岛大学2012年考研专业课真题】信号与系统2012
4
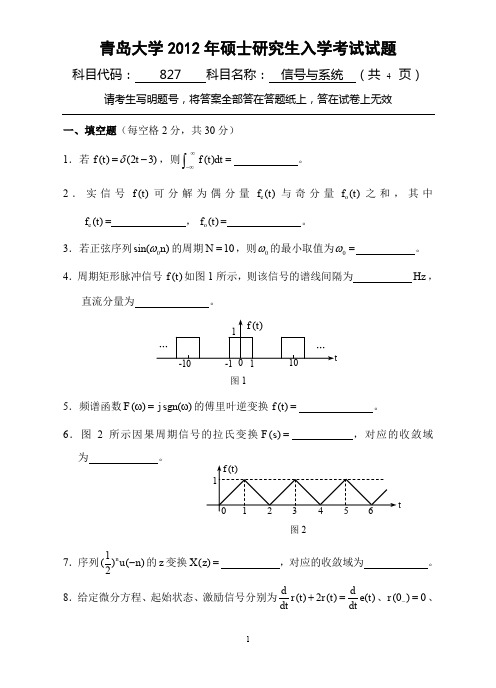
科目代码: 827 科目名称: 信号与系统 (共
4
页)
请考生写明题号,将答案全部答在答题纸上,答在试卷上无效
e(t ) e3t u(t ) ,则 r (0 )
。
9 .若可逆系统的单位冲激响应为 h(t ) ,其逆系统的单位冲激响应为 hI (t ) ,则
h(t ) hI (t )
。
10.图 3 所示以 f (t ) 为输入, g (t ) 为输出的对 调幅波进行相干解调的系统是 (线性/非线性) 、 的。 (时变/时不变)
f (t )
低通滤波
g (t )
cos(0t )
图3
二、 (15 分)计算图 4 所示矩形脉冲信号 h(t ) 和半波正弦脉冲信号 e(t ) 的卷积积 分 r (t ) h(t ) e(t ) ,并画出 r (t ) 的波形。
f e (t ) =
, f o (t ) =
。 。
Hz ,
3.若正弦序列 sin(0 n) 的周期 N 10 ,则 0 的最小取值为 0 4.周期矩形脉冲信号 f (t ) 如图 1 所示,则该信号的谱线间隔为 直流分量为 。
1 … -10 -1 0 1 图1 10
f (t )
…
t
5.频谱函数 F () j sgn() 的傅里叶逆变换 f (t ) 6 .图 2 所示因果周期信号的拉氏变换 F ( s) 为 。
f (t )
1 0 1 2 3
图2
。 ,对应的收敛域
4
5
6
t
1 7.序列 ( ) n u (n) 的 z 变换 X ( z ) 2
8.给定微分方程、起始状态、激励信号分别为
青岛理工大学自动控制原理总复习题.doc

青岛理工大学自动控制原理总复习题.doc总复习第一章的概念2、自动控制系统基本控制方式:(1)、反馈控制方式;(2)、开环控制方式;(3)、复合控制方式。
3、基本要求的提法:可以归结为稳定性(长期稳定性)、准确性(精度)和快速性(相对稳定性)。
第二章要求:1、掌握运用拉氏变换解微分方程的方法;2、牢固掌握传递函数的概念、定义和性质;3、明确传递函数与微分方程之间的关系;4、能熟练地进行结构图等效变换;5、明确结构图与信号流图之间的关系;6、熟练运用梅逊公式求系统的传递函数;例1 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(1211s R s C s R s C ,)()(,)()(2122S R S C s R s C 。
例2 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(,)()(,)()(s N S E s R s E s N s C s R s C 。
例3:例4、一个控制系统动态结构图如下,试求系统的传递函数。
X r )例5 如图RLC 电路,试列写网络传递函数 U c (s)/U r (s).解: 零初始条件下取拉氏变换:例6某一个控制系统的单位阶跃响应为:t t e e t C --+-=221)(,试求系统的传递函数、微分方程和脉冲响应。
(t)U )()()()(22t u t u dtt du RC dt t u d LC r c c c =++11)()()(2++==RCs LCs s U s U s G r c )()()()(2s U s U s RCsU s U LCs r c c c =++=?k KK P 1例7一个控制系统的单位脉冲响应为t t e e t C ---=24)(,试求系统的传递函数、微分方程、单位阶跃响应。
第三章本章要求:1、稳定性判断1)正确理解系统稳定性概念及稳定的充要条件。
闭环系统特征方程的所有根均具有负实部;或者说,闭环传递函数的极点均分布在平面的左半部。