北航现代控制理论作业(一)答案
现代控制理论试卷答案3套
现代控制理论试卷 1一、(10分)判断以下结论,若是正确的,则在括号里打√,反之打×(1)用独立变量描述的系统状态向量的维数是唯一。
()(2)线性定常系统经过非奇异线性变换后,系统的能观性不变。
()(3)若一个系统是李雅普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。
()(4)状态反馈不改变被控系统的能控性和能观测性。
()(5)通过全维状态观测器引入状态反馈来任意配置系统的闭环极点时,要求系统必须同时能控和能观的。
()二、(12分)已知系统1001010,(0)00121x x x⎛⎫⎛⎫⎪ ⎪==⎪ ⎪⎪ ⎪⎝⎭⎝⎭,求()x t.三、(12分) 考虑由下式确定的系统:2s+2(s)=43Ws s++,求其状态空间实现的能控标准型和对角线标准型。
四、(9分)已知系统[]210020,011003x x y⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?五、(17分) 判断下列系统的能控性、能观性;叙述李亚普诺夫稳定性的充要条件并分析下面系统的稳定性.[]xy u x x 11103211=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=六、(17分)已知子系统1∑ 111121011x x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,[]1110y x = 2∑ []22222110,01011x x u y x -⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦求出串联后系统的状态模型和传递函数.七、(15分)确定使系统2001020240021a x x u b -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦为完全能控时,待定参数的取值范围。
八、(8分)已知非线性系统 ⎩⎨⎧--=+-=2112211sin 2x a x xx x x试求系统的平衡点,并确定出可以保证系统大范围渐近稳定的1a 的范围。
现代控制理论 试卷 1参考答案一、(10分)判断以下结论,若是正确的,则在括号里打√,反之打× (1) 用独立变量描述的系统状态向量的维数是唯一。
现代控制理论第版课后习题答案
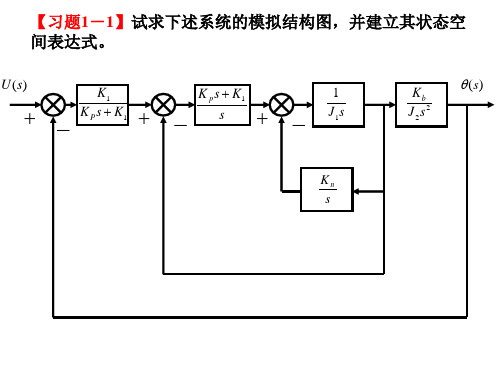
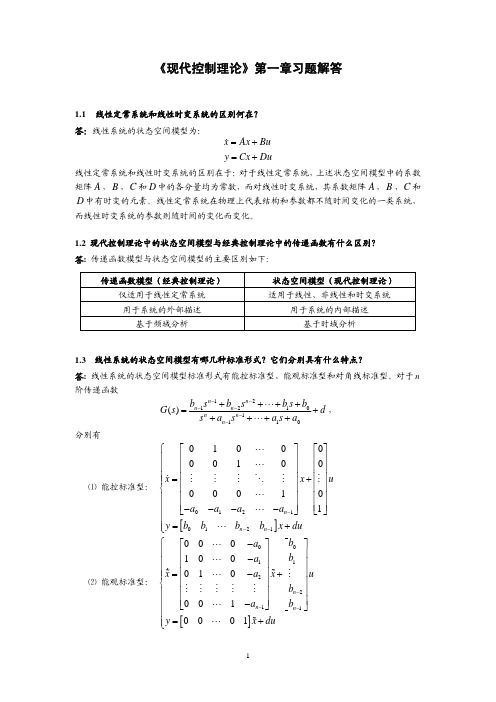
习题答案Document number : WTWYT-WYWY-BTGTT-YTTYU-2018GT《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令0(s) = y,则,=册所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压"⑴为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R?上的电压作为输出量的输出方程。
解:由图,令ii =x}J2 =x2,u c =x3l输出量y = R2X2• & 1 1Rg + L, Xj + x y = u有电路原理可知:L2XI+R2X2=X3= x2 +C x3写成矢量矩阵形式为:14两输入也,两输出比,比的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令x, = y,吃=,,兀3 =,,则有相应的模拟结构图如下:并画岀相应的模拟结构图10 £初・ 117/ \ 6(5 + 1) -4 V 3 a解:VV (5)= ------ ---------- = --------- +— + ------------+ 丄s(s + 2)(s + 3y (s + 3y 5 + 3 s + 2 s1- 7给定下列状态空间表达式y = [0 0 1 x 2_V 3_(1) 画出其模拟结构图 (2) 求系统的传递函数解:-1 0(2) W(s) = (s/ — A)= 25 + 31 — 1 5 + 31-8求下列矩阵的特征矢量_0 1 0 _ (3)32-12 -7 -6-1 0解:A 的特征方程 |刀—A|= —3 2-2 =23+6/l 2 + lU + 6 = 0 1272 + 6解之得:入=—1,/?2 = —2,/?3 = —31-6 (2)已知系统传递函数W(s)=6(5 + 1)5(5 +2)(5+ 3)2,试求岀系统的约旦标准型的实现,■ 010 '/AiP113 0 2 P11 =— P21 -12 -7 -6_ ■皿■叽当人=一1时,令內=1Ai-1 (或令Pll =一1,得片=P21 =1 )1■ 0 1 0 ■P\2Pn 3 02 Pll =-2 P22-12 -7 _6. L/^2.解得:”22=一2卩2丿32 =>12'P22 =P\2(或令从2 T,得4 = "22“320 1当人=一3时, 3 0 -12 -71 -2£ 2解得:〃23=-3/心〃33=3门3令戸3 = 1得1・9将下列状态空间表达式化成约旦标准型(并联分解)~4 1 -2■3 fX 2 = 1 0 2X 2 + 2 7⑵-.1-1 d_5 3_得解得:P 2] =^31 =-P\\当人=一2时,令门2 = 2 得P 2 = 2 -41'4 1 -2'当人=3时, 1 02=3 "211 -13 .解之得 Pl2 = P12 + 1,P22 = “32 令 Pl2 =1并联联结(第3版教材)已知如图1・22所示的系统,其中子系统1、2的传递函数阵分别求系统的闭环传递函数_4 1 -2 P11PwT 1 0 2 "21 =3 P21 + 11 -1 3 -■叽丄 当An =3时,解:A 的特征方程2-4 -1 |27 - A| = -12 -1 1 2-2 =(2-1)(2-3)2 =02- 3解之得 P2! =Pj] =P11令/“iPw■fP21 = 1■叽丄当人=1时, 解之得 P13 = °,“23 = 2^33 令 “33 = 1约旦标准型1- 10已知两系统的传递函数分别为W|(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解: (D 串联联结MlR = 得10 -1得1-H (第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:M2已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数I】的系数b(即控制列阵)为⑴b=;解法1 :解法2 :求T,使得厂,;得宀鳥所以T=所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数屛‘。
《现代控制理论》课后习题全部答案(最完整打印版)

第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。
现代控制理论课后题及答案
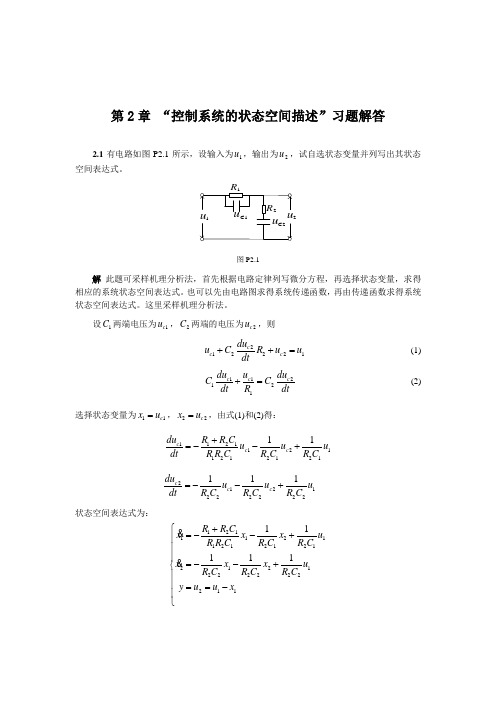
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
《现代控制理论》第三版_.习题答案
K1
0 0 K1
K p
B 0 0 0 0 0
K1
T
K p
C 1 0 0 0 0 0;
1-3.
图
1-29
机械系统。M1
M
受外力
2
作用 f1 f2作用,求M1 M 2运动速度输出的
状态空间表达式。
解:微分方程 M1 y1 f1 K1(c1 c2 ) B1( y1 y2 )
M 2 y2 f2 K2c2 B2 y2 K1(c1 c2 ) B1( y1 y2 )
第一章 作业
参考答案
1-1. 求模拟结构图,并建立其状态空间 表达式。 解:状态方程:
x1 x2
x2
Kb J2
x3
x3
1 J1
x5 K p x6 x3 x4
Kp J1
x3
1 J1
x4
1 J1
x5
Kp J1
x6
x4 Kn x3 x5 K1(x6 x3 ) K1x3 K1x6
x 6
设状态变量 x = c1 c2 y1 y2 T
y y1 y2 T ,u f1 f2 T
令 x1 c1, x2 c2, x3 y1, x4 y2
x1 x3 x2 x4
x3
K1 M1
x1
K1 M1
x2
B1 M1
x3
B1 M1
x4
1 M1
f1
x4
K1 M2
x1
K1 K2 M2
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
现代控制理论习题及答案
现代控制理论习题及答案现代控制理论习题及答案现代控制理论是控制工程领域的重要分支,它研究如何设计和分析控制系统,以实现对动态系统的稳定性、响应速度、精度等方面的要求。
在学习现代控制理论过程中,习题是一个非常重要的环节,通过解答习题可以帮助我们巩固理论知识,提高问题解决能力。
本文将介绍一些常见的现代控制理论习题及其答案,希望对读者有所帮助。
1. 题目:给定一个开环传递函数 G(s) = 10/(s+5),求其闭环传递函数 T(s) 和稳定性判断。
解答:闭环传递函数 T(s) 可以通过公式 T(s) = G(s) / (1 + G(s)) 计算得到。
代入G(s) 的表达式,得到 T(s) = 10/(s+15)。
稳定性判断可以通过判断开环传递函数G(s) 的极点是否在左半平面来进行。
由于 G(s) 的极点为 -5,位于左半平面,因此系统是稳定的。
2. 题目:给定一个系统的状态空间表达式为 dx/dt = Ax + Bu,其中 A = [[-1, 2], [0, -3]],B = [[1], [1]],求系统的传递函数表达式。
解答:系统的传递函数表达式可以通过状态空间表达式进行求解。
首先,计算系统的特征值,即矩阵 A 的特征值。
通过求解 det(sI - A) = 0,可以得到系统的特征值为 -1 和 -3。
然后,将特征值代入传递函数表达式的分母,得到传递函数的分母为 (s+1)(s+3)。
接下来,计算传递函数的分子,可以通过求解 C = D(sI - A)^(-1)B 得到,其中 C 和 D 分别为输出矩阵和输入矩阵。
代入给定的 A、B 矩阵,计算得到 C = [1, 0] 和 D = [0]。
因此,系统的传递函数表达式为 G(s) = C(sI - A)^(-1)B = [1, 0] * [(s+1)^(-1), -2(s+3)^(-1); 0, (s+3)^(-1)] * [1; 1] =(s+1)^(-1) + 2(s+3)^(-1)。
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
《现代控制理论》第3版课后习题答案
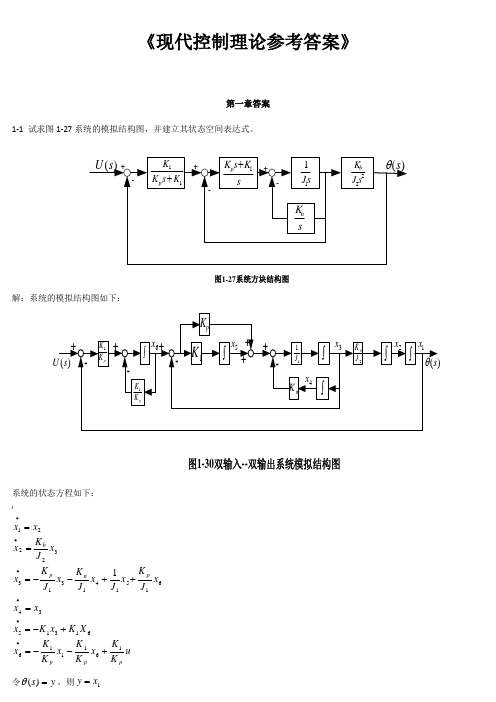
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下: )u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为: `[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论习题解答(第一章)

g
题 1-3 图 2
Y2 (s)
3
U (s)
K1
x6
x6
T1 1
T1
K2
x4
x4
T2 1
K3 x2
x2 1 T4
T2
x3
x3
x5
x5
K5
T5
1 T5
写成矩阵的形式得:
题 1-3 图 3
x 1
=− 1 T4
x1
+
1 T4
x2
x2 = K 3 (x4 − x3 )
x3 = x2
x 4
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
(4) G(s)
=
s3
s2 + 2s + 3 + 3s 2 + 3s + 1
【解】: 此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)
⎡0 1
x
=
⎢ ⎢
0
0
⎢⎣− 6 −11
y = [1 1 1]x
0 ⎤ ⎡0⎤
1
⎥ ⎥
x
现代控制理论第一章答案
a0 3 a1 7 a2 5 b0 2 b1 1 b2 0 b3 0
标准型实现
1 0 0 0 x 0 u 0 x 0 1 3 7 5 1
y (b0 a 0 b3 ) (b1 a1b3 ) (b2 a 2 b3 )x 2 1 0x
1 0 0 0 x 0 0 1 x 0 u 3 7 5 1
y (b0 a 0 b3 ) (b1 a1b3 ) (b2 a 2 b3 )x 2 3 1x
【习题1-6】已知系统传递函数
10( s 1) (1) W ( s ) s ( s 1)(s 3) 6( s 1) (2) W ( s ) s ( s 2)(s 3) 2
x1
0 0 0 x 0 K1 Kp 0
1
0 Kb 0 J2 Kp 0 J1 0 K1 0 0 0 Kn
0 0 1 J1 0 0 0
0 0 Kp J1 K1 K1 Kp 0
0 0 0 0 1 0 J1 x 0 0 K1 Kp 0 0 0
y 0 0 1x
【解】(1)画模拟结构图的步骤 第一步:画出三个积分器 第二步:画出各增益系数和信号综合点 第三步:根据各变量的相互关系用信号线连接起来 (2)求系统的传递函数矩阵
Y ( s) 2s 2 7 s 3 1 W ( s) c( sI A) b U ( s) ( s 1)(s 2)(s 3) 2s 1 ( s 1)(s 2)
1 0
4 3
【习题1-10】已知两个子系统的传递函数分别为:
(完整word版)《现代控制理论》第3版课后习题答案
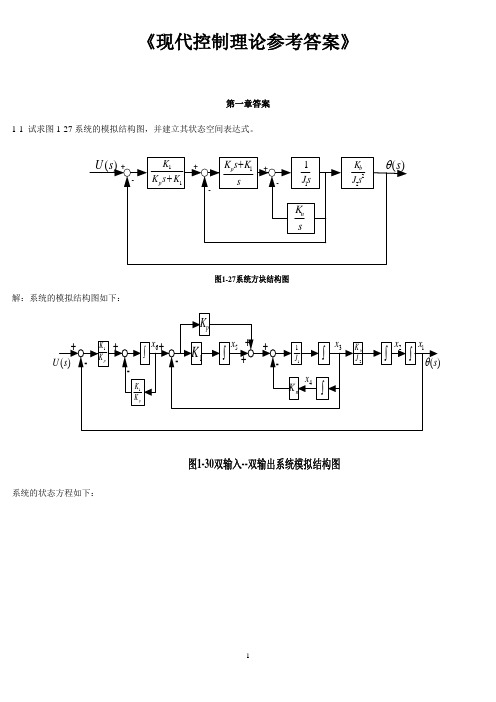
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论大作业1
Harbin Institute of Technology现代控制理论基础上机实验报告之一亚微米超精密车床振动控制系统的状态空间法设计课程名称:现代控制理论院系:航天学院自动化班号:1104103作者:皮永江学号:1110410228指导教师:刘杨、井后华哈尔滨工业大学2014年6月5日1.工程背景介绍超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。
2.实验目的通过本次上机实验,使同学们熟练掌握:a)控制系统机理建模b)时域性能指标与极点配置的关系c)状态反馈控制律设计d)MATLAB语言的应用3.给定的实际参数与数学建模3.0参数与物理模型机床的已知参数上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
床身质量的运动方程为:(1)空气弹簧所产生的被动控制力作动器所产生的主动控制力假设空气弹簧内为绝热过程,则被动控制力可以表示为:(2)标准压力下的空气弹簧体积相对位移(被控制量)空气弹簧的参考压力参考压力下单一弹簧的面积参考压力下空气弹簧的总面积绝热系数电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
由于系统工作在微振动状况,且在低于作动器截止频率的低频范围内,因此主动控制力可近似线性化地表示为:(3)力-电流转换系数电枢电流其中,电枢电流满足微分方程:(4)控制回路电枢电感系数控制回路电枢电阻控制回路反电动势控制电压综上得到如下方程组:3.1如果忽略非线性部分数学建模设状态变量为:得到状态方程:状态空间表达式:代入数据:那么状态空间表达式为:显然系统能控,可以采用状态反馈进行任意配置极点。
《现代控制理论》课后习题答案1
G ( s) =
每一个环节的状态空间模型分别为:
1 2s + 5 ⋅ s+3 s+5
2 = −5 x 2 + u1 ⎧x ⎩ y = −5 x 2 + 2u1
1 = −3x1 + u ⎧x ⎨ ⎩ y1 = x1
又因为 y1 = u1 , 所以
和 ⎨
1 = −3 x1 + u ⎧x ⎨ 2 = x1 − 5 x 2 ⎩x y = 2 x1 − 5 x 2
由此得到的 d 就是状态空间实现中的直接转移项 D 。 1.6 在例 1.2.2 处理一般传递函数的状态空间实现过程中,采用了如图 1.12 的串联分解, 试问:若将图 1.12 中的两个环节前后调换,则对结果有何影响? 答: 将图 1.12 中的两个环节调换后 y a(s)
5
1.10
已知单输入单输出时不变系统的微分方程为:
(t ) + 3 y (t ) = u ( t ) + 6u ( t ) + 8u ( t ) y (t ) + 4 y
试求:(1)建立此系统状态空间模型的对角线标准形; (2)根据所建立的对角线标准形求系统的传递函数。 答: (1)由微分方程可得:
s 2 + 6s + 8 2s + 5 G(s) = 2 = 1+ 2 s + 4s + 3 s + 4s + 3
记
G 1 (s) =
其中,
c c 2s + 5 2s + 5 = = 1 + 2 , s + 4 s + 3 ( s + 1)( s + 3) s + 1 s + 3
现代控制理论课后作业答案程鹏王艳东

现代控制理论第一次作业1-1.由图1-1所示,可得:1311322323313112121()331()122x u x s x u x x x u x x x u x s x x x x y x x u s y x x u⎧=-⎪+=--⎧⎪⎪⎪=--=-⎪⎪⇒+⎨⎨=⎪⎪=⎪⎪=++⎩⎪⎪=++⎩ 则状态空间可表示为:()301101112000110x x uy x u--⎛⎫⎛⎫⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=+ 1-4.由101,111A B ⎛⎫⎛⎫==⎪ ⎪⎝⎭⎝⎭。
11210()()1110111(1)1s s sI A s s s s ---⎛⎫Φ=-= ⎪--⎝⎭⎛⎫ ⎪-⎪= ⎪ ⎪--⎝⎭则,110[()]t Attt e e L sI A tee --⎛⎫=-= ⎪⎝⎭, ()010()()1()t ttA t t t e eBu d u d t e e τττττττττ----⎛⎫⎛⎫=⎪ ⎪-⎝⎭⎝⎭⎰⎰,()1u τ= 则,()0()(0)()1010212tAtA t t t t t t t t x t e x e Bu d e e te e te e te τττ-=+⎛⎫⎛⎫-⎛⎫=+ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎛⎫-= ⎪⎝⎭⎰1-5.(1)极点多项式为: 由()2rank G s =, 一阶子式公分母:2(1)s s + 二阶子式公分母:22(1)s s + 极点多项式为:22(1)s s + (2)零点多项式为:二阶子式:2222212(1)()212(1)(1)s s s s s s s s --+-++=++ 零点多项式为:1(1)()2s s -+现代控制理论第二次作业1-7.系统的状态方程为:x Ax bu =+其中,01101001n A a a a -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥---⎣⎦,001b ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦。
1101111101111011000()011**1001**111n n n n n n n n n s sI A b s s s s s s s s s s s ααααααααα----------⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-=⎢⎥⎢⎥-⎢⎥⎢⎥+⎣⎦⎣⎦⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥++++⎢⎥⎢⎥⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥=⎢⎥++++⎢⎥⎣⎦1-8.反证法:设1121[]n rank b AbA b n n -=<,则存在一个非零向量α使得: 11111011[]00n n n bAbA b b Ab A b αααα---=+++=不防设110n α-≠,则,11111201211()n n n n A b b Ab A b αααα----=-+++两边同乘A ,则11111201211()n n n n A b Ab A b A b αααα---=-+++则可看出1n A b 能用12(,,)n b Ab A b -线性表出,以此类推,可得11+1n n n A b A b A b (,)均可由12(,,)n b Ab A b -线性表出,则:121[]n rank b AbA b n n -=≠ 与已知矛盾,假设不成立,所以有111[]n rank b AbA b n -=1-9.(1)解:010110001A ⎡⎤⎢⎥=--⎢⎥⎢⎥⎣⎦,011b ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,[]121C =可控性矩阵2011110111U bAbA b -⎡⎤⎢⎥⎡⎤==-⎣⎦⎢⎥⎢⎥⎣⎦,det 0U ≠,故系统可控。
(完整版)现代控制理论试卷答案与解析
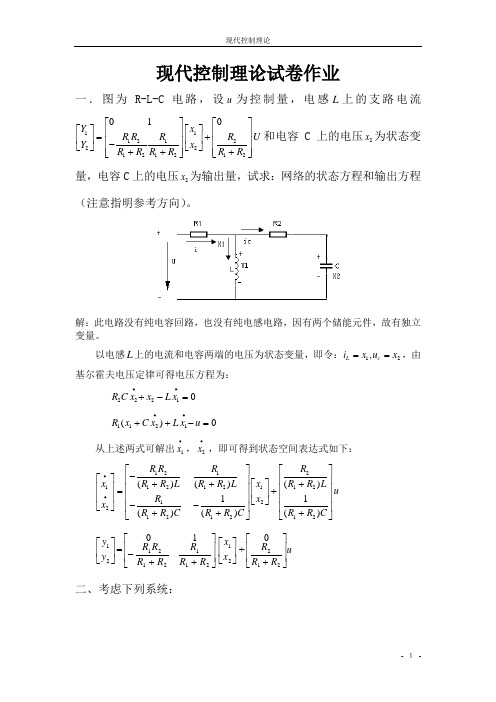
现代控制理论试卷作业一.图为R-L-C电路,设u为控制量,电感L上的支路电流11121222121212010Y xUR R R RY xR R R R R R⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦+++⎢⎥⎢⎥⎣⎦⎣⎦和电容C上的电压2x为状态变量,电容C上的电压2x为输出量,试求:网络的状态方程和输出方程(注意指明参考方向)。
解:此电路没有纯电容回路,也没有纯电感电路,因有两个储能元件,故有独立变量。
以电感L上的电流和电容两端的电压为状态变量,即令:12,L ci x u x==,由基尔霍夫电压定律可得电压方程为:2221R C x x L x••+-=1121()0R x C x L x u••++-=从上述两式可解出1x•,2x•,即可得到状态空间表达式如下:121121212()()R Rx R R LRxR R C••⎡-⎡⎤⎢+⎢⎥⎢=⎢⎥⎢-⎣⎦⎢+⎣121121221212()()11()()R RxR R L R R LuxR R C R R C⎤⎡⎤⎥⎢⎥++⎡⎤⎥⎢⎥+⎢⎥⎥⎢⎥⎣⎦-⎥⎢⎥++⎦⎣⎦⎥⎦⎤⎢⎣⎡21yy=⎥⎥⎦⎤⎢⎢⎣⎡++-21121211RRRRRRR⎥⎦⎤⎢⎣⎡21xx+uRRR⎥⎥⎦⎤⎢⎢⎣⎡+212二、考虑下列系统:(a)给出这个系统状态变量的实现;(b)可以选出参数K(或a)的某个值,使得这个实现或者丧失能控性,或者丧失能观性,或者同时消失。
解:(a)模拟结构图如下:13123312312321332133x u kx xx u kxx x x axy x x•••=--=-=+-=+则可得系统的状态空间表达式:123xxx•••⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦32-⎡⎢⎢⎢⎣112311xkk x ua x-⎡⎤⎤⎡⎤⎢⎥⎥⎢⎥-+⎢⎥⎥⎢⎥⎢⎥⎥⎢⎥-⎦⎣⎦⎣⎦[2y=1]123xxx⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦(b ) 因为 3023A -⎡⎢=⎢⎢⎣ 001 k k a -⎤⎥-⎥⎥-⎦ 110b ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦302Ab -⎡⎢=⎢⎢⎣ 0013 k k a -⎤⎥-⎥⎥-⎦131001-⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ 23023A b -⎡⎢=⎢⎢⎣ 0013 k k a -⎤⎥-⎥⎥-⎦301-⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦92k k a -⎡⎤⎢⎥=-⎢⎥⎢⎥--⎣⎦ [M b = Ab 2110A b ⎡⎢⎤=⎦⎢⎢⎣ 301- 91020k k a -⎤⎡⎥⎢-→⎥⎢⎥⎢--⎦⎣ 010 31k a -⎤⎥-⎥⎥-⎦所以:当1a =时,该系统不能控;当1a ≠时,该系统能控。