北航现代控制理论作业(三)
现代控制理论大作业
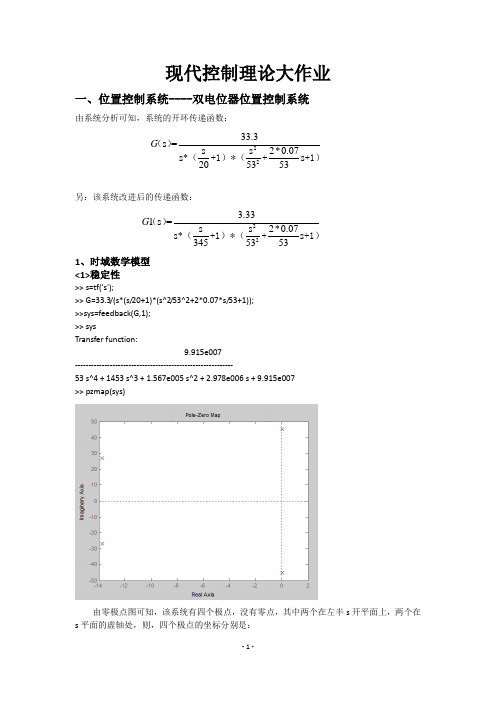
现代控制理论大作业一、位置控制系统----双电位器位置控制系统由系统分析可知,系统的开环传递函数:2233.3s =s s 2*0.07s*s 205353G()(+1)*(++1)另:该系统改进后的传递函数:223.331s =s s 2*0.07s*s 3455353G ()(+1)*(++1)1、时域数学模型<1>稳定性>> s=tf('s');>> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sysTransfer function:9.915e007 -----------------------------------------------------------53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007>> pzmap(sys)由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:>> p=pole(sys)p =0.0453 +45.2232i0.0453 -45.2232i-13.7553 +26.9359i-13.7553 -26.9359i系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态<2>稳态误差分析稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。
改进后系统(G1)如下,求其特征方程的极点:>> s=tf('s');>> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1));>> sys2=feedback(G1,1);>>p=pole(sys2);p =1.0e+002 *-3.4492-0.0206 + 0.5258i-0.0206 - 0.5258i-0.0338可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析:由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
现代控制理论大作业

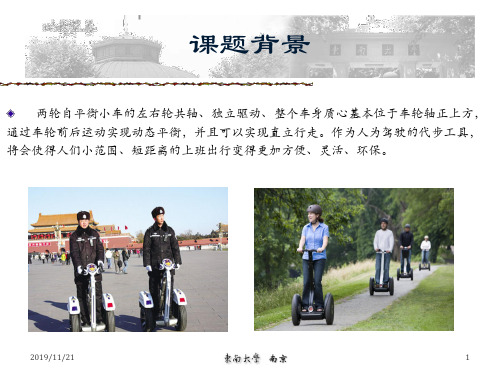
现代控制理论直流电动机模型的分析姓名:李志鑫班级:测控1003学号:20100203030921直流电动机的介绍1.1研究的意义直流电机是现今工业上应用最广的电机之一,直流电机具有良好的调速特性、较大的启动转矩、功率大及响应快等优点。
在伺服系统中应用的直流电机称为直流伺服电机,小功率的直流伺服电机往往应用在磁盘驱动器的驱动及打印机等计算机相关的设备中,大功率的伺服电机则往往应用在工业机器人系统和CNC铣床等大型工具上。
[1]1.2直流电动机的基本结构直流电动机具有良好的启动、制动和调速特性,可以方便地在宽范围内实现无级调速,故多采用在对电动机的调速性能要求较高的生产设备中。
直流伺服电机的电枢控制:直流伺服电机一般包含3个组成部分:-图1.1①磁极:电机的定子部分,由磁极N—S级组成,可以是永久磁铁(此类称为永磁式直流伺服电机),也可以是绕在磁极上的激励线圈构成。
②电枢:电机的转子部分,为表面上绕有线圈的圆形铁芯,线圈与换向片焊接在一起。
③电刷:电机定子的一部分,当电枢转动时,电刷交替地与换向片接触在一起。
直流电动机的启动电动机从静止状态过渡到稳速的过程叫启动过程。
电机的启动性能有以下几点要求:1)启动时电磁转矩要大,以利于克服启动时的阻转矩。
2)启动时电枢电流要尽可能的小。
3)电动机有较小的转动惯量和在加速过程中保持足够大的电磁转矩,以利于缩短启动时间。
直流电动机调速可以有:(1)改变电枢电源电压;(2)在电枢回路中串调节电阻;(3)改变磁通,即改变励磁回路的调节电阻Rf以改变励磁电流。
本文章所介绍的直流伺服电机,其中励磁电流保持常数,而有电枢电流进行控制。
这种利用电枢电流对直流伺服电机的输出速度的控制称为直流伺服电机的电枢控制。
如图1.2Bm电枢线路图1.2——定义为电枢电压(伏特)。
——定义为电枢电流(安培)。
——定义为电枢电阻(欧姆)。
——定义为电枢电感(亨利)。
——定义为反电动势(伏特)。
现代控制理论大作业
2019/11/21
2
课题背景
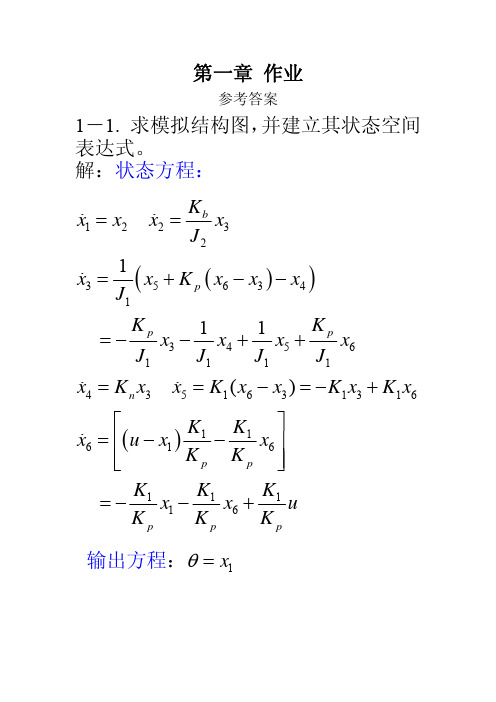
系统工作原理
Accelerometer gyroscope 遥控器
电源
左轮 软件编码
AD 采样
滤波
MCU
驱动器1 驱动器2
无线模块
软件编码 右轮
减速机构 左电机
右电机 减速机构
2019/11/21
3
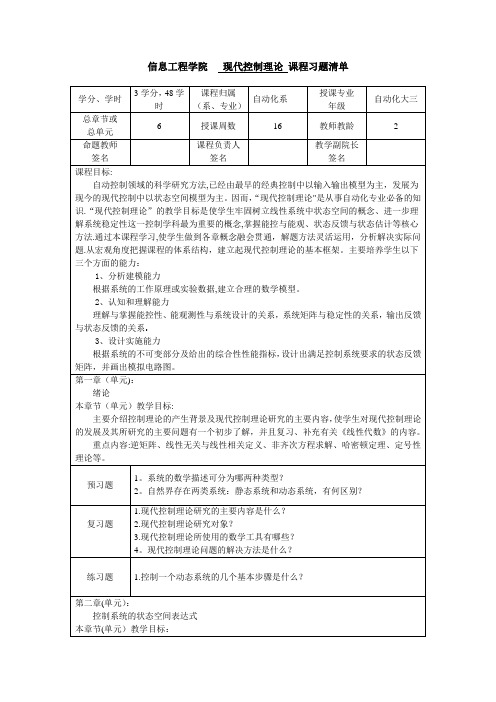
系统工作原理 前进(后仰)
后退(前倾)
2019/11/21
课题背景
后退(纠正后仰) 前进(纠正前倾)
Matlab计算程序:
pole=[-1,-2,-3,-4]; K=place(A,B,pole) A1=A-B*K; pole=[-3,-4,-5,-6]; K=place(A,B,pole) A2=A-B*K; pole=[-8,-9,-10,-11]; K=place(A,B,pole) A3=A-B*K;
figure; hold on; plot(curve1(:,2),'color','blue'); plot(curve2(:,2),'color','red'); plot(curve3(:,2),'color','green'); xlabel(‘时间(s)'); ylabel(‘摆动角度(rad)'); hold off
2019/11/21
N C,CA,CA2 ,CA3
计算结果:
rankc = 4 ranko = 4
结论: k(M)=4 系统完全能控 Rank(N)=4 系统完全能观
稳定性分析
运用Matlab解出矩阵A的特征值如下:
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
现代控制理论1-8三习题库
信息工程学院现代控制理论课程习题清单正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线性变换,线性定常系统状态方程的求解方法.重点内容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本性质,传递函数矩阵的定义.要求熟练掌握通过传递函数、微分方程和结构图建立电路、机电系统的状态空间表达式,并画出状态变量图,以及能控、能观、对角和约当标准型.难点:状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。
预习题1。
现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别?2。
状态、状态空间的概念?3.状态方程规范形式有何特点?4。
状态变量和状态矢量的定义?5。
怎样建立状态空间模型?6.怎样从状态空间表达式求传递函数?复习题1.怎样写出SISO系统状态空间表达式对应的传递函数阵表达式2.若已知系统的模拟结构图,如何建立其状态空间表达式?3.求下列矩阵的特征矢量⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=2510221-1A4.(判断)状态变量的选取具有非惟一性。
5.(判断)系统状态变量的个数不是惟一的,可任意选取。
6.(判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输出关系的系统,表达为状态空间描述。
7.(判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定常系统中应用,也可以在时变系统中应用。
8.如果矩阵A 有重特征值,并且独立特征向量的个数小于n ,则只能化为模态阵。
9.动态系统的状态是一个可以确定该系统______(结构,行为)的信息集合。
这些信息对于确定系统______(过去,未来)的行为是充分且必要的。
10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时,则称这样的系统为______(线性定常,线性时变)系统.如果这些元素中有些是时间t 的函数,则称系统为______(线性定常,线性时变)系统。
11.线性变换不改变系统的______特征值,状态变量)。
《现代控制理论》第3版课后习题答案
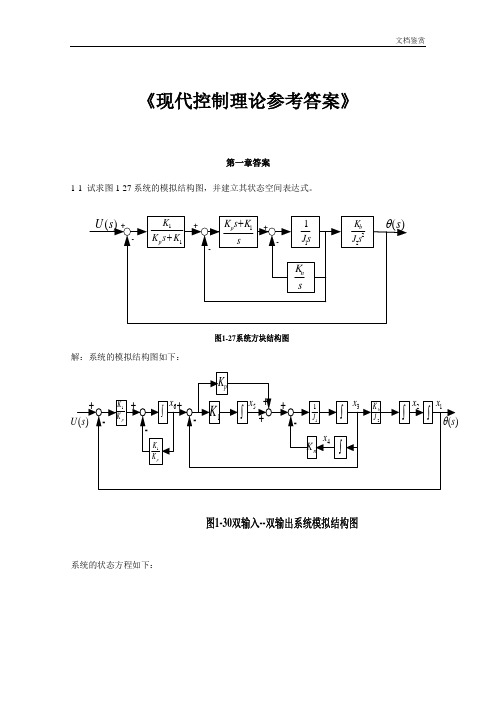
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》习题册

第一章 控制系统的状态空间描述1-1 求图示网络的状态空间表达式,选取C u 和i 为状态变量。
RL +1-2 已知系统微分方程,试将其变换为状态空间表达式。
(1)u y y y y 2642=+++(2)u u y yy 237+=++(3)u u u y y yy 23745++=+++(4)u u u u y y y y 81786116+++=+++1-3试画出如图所示系统的状态变量图,并建立其状态空间表达式。
1-4 已知系统的传递函数,试建立其状态空间表达式,并画出状态变量图。
(1)61161)(232+++++=s s s s s s G (2)6513)(22++++=s s s s s G(3))3()1(4)(2++=s s s s G (4)13332)(232+++++=s s s s s s G1-5 已知系统233)()(2+++=s s s s U s Y ,试求其能控标准型和对角标准型。
1-6 已知系统传递函数,试用并联法求其状态空间表达式。
(1)61161)(23+++=s s s s G (2)2545)(23+++=s s s s G1-7 试求下列状态方程所定义系统的传递函数。
⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21212121211001101142510x x y y u u x x x x1-8 试将下列状态方程化为对角标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1751326712203010(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=01161161000101-9 试将下列状态方程化为约当标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=102112(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213*********(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100452100010第二章 线性控制系统状态空间表达式的解2-1 试求下列系统矩阵A 对应的状态转移矩阵。
现代控制理论大作业
现代控制理论大作业“现代控制理论”课本质上是一门工学理论基础课,它在电气工程领域众多研究工作中也有着广泛的应用,例如发电机励磁控制、发电机调速控制、电力电子装置控制等。
“现代控制理论”课立足于近年来控制理论与工程应用的最新进展,旨在实现以下两个目的:一是将控制与系统理论的前沿领域介绍给研究生,使之理解基本思想并掌握基本设计方法;二是在工程实践(主要是电力系统)与先进理论之间架设一座桥梁,使研究生能正确地运用有关理论和方法解决实际工程问题。
通过实现上述目标,本课程可拓宽研究生的专业基础知识,了解和掌握学科前沿动态,培养和提高研究生独立从事科研的能力。
课程内容本课程的教学理念是“用生动鲜活的例子诠释复杂的控制理论,用教师的研究经历点亮学生思考的火炬”。
“现代控制理论”立足于近年来控制理论与工程应用的最新进展,紧紧围绕鲁棒控制和非线性系统控制两个重点,主要讲述以下内容:①线性最优控制系统理论。
②非线性最优控制系统设计——微分几何方法。
③线性H∞控制设计原理。
④非线性控制系统H∞设计原理。
课程教学方式本课程采用教师讲授、学生课外阅读、习题练习和研究型大作业相结合的教学模式。
为加强理论联系实际,避免过分理论化,课程结合控制工程特别是电力系统工程实际,设置了下述专题研究:a. 汽轮机汽门开度系统非线性控制器设计b. 可控串联补偿鲁棒控制器设计c. 水轮机调速非线性鲁棒控制器设计d. 静止无功补偿器非线性控制器设计e. 直流输电系统非线性控制器设计f. 倒立摆控制器设计(购置2级和3级倒立摆各1台)g. 电力巡线机器人越障控制上述专题研究的目的是:在基本掌握现代控制理论主要设计方法的基础上,让研究生开展某一专题的研究,以培养学生的综合能力和素质。
这一部分内容可以代替课程的期末考试(笔试闭卷)。
教师事先就专题研究的要求、选题、难度等方面进行指导;专题研究一般由个人独立完成,内容较多的题目可以两个人作为一组来完成。
现代控制理论第三版课后答案

1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
1-5系统的动态特性由下列微分方程描述u u u y y y y 23375)2(......++=+++列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡321321321132100573100010x x x y u x x x x x x 。
相应的模拟结构图如下:1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W )1)(2)(3()3(2)3(2+++=+++=-s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=--)2)(1(150)3()3(2033)1)(2)(3(1)(21s s s s s s s s s s s s A sI ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=-=-)3)(12()3()3()1)(2)(3(1210)2)(1(150)3()3(2033)1)(2)(3(1)()(21s s s s s s s s s s s s s s s s s s s s B A sI s W ux[])1)(2()12()1)(2)(3(1)3)(12()3()3(100)()(1+++=+++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=-=-s s s s s s s s s s s B A sI C s W uy 1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=2102111)(1s s s s s W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=0114131)(2s s s s W试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++==)2)(1(1)1(1)4)(3)(2(75)3)(1(121021110114131)()()(2212s s s s s s s s s s s s s s s s s s W s W s W(2)并联联结⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++±⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=±=01141312102111)()()(11s s s s s s s s W s W s W1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=210111)(1s s s s W ⎥⎦⎤⎢⎣⎡=10012)s (W求系统的闭环传递函数 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2101111001210111)()(211s s s s s s s W s W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-++=+2301121001210111)()(1s s s s s s s s I s W s W I []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+-320)3(1211212331)()(121s s s s s s s s s s s s s s s W s W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-+++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+=-310)3(1211101)1)(2(3312111112012331)()()()(1121s s s s s s s s s s s s s ss s s s s s s s s s W s W s W I s W1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2121111s s s )s (W ⎥⎦⎤⎢⎣⎡=10012)s (W求系统的闭环传递函数 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=212111100121211111s s s s s s )s (W )s (W⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=+232112100121211111s s s s s s s s )s (W )s (W I []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+-1221232512111s s s s s s s )s (s )s (W )s (W I []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-++++++++-+++++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-++++-++++-++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+=-252)25)(2(66251)25()2()83()1(1121)2(222)2(1)2(32)2(325)1(2112112212325)1()()()()(222322222221111s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s ss s s s s s s s s s s s W s W s W I s W2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论作业

现代控制理论大作业要求:(1)自选一实际物理对象进行研究,建立实际物理系统的状态空间模型;(2)进行原系统的定性分析,包括稳定性、能控性、能观性分析;(3)根据系统提出的性能指标要求(如超调量、超调时间、调节时间等动态 性能指标以及稳态误差等稳态性能指标),进行原系统的仿真分析,和要求的性能指标做对比;(4)对不稳定系统且能镇定的系统,进行镇定控制;(5)对未达到性能指标要求的系统进行状态反馈控制设计,满足系统性能指 标要求;(6)设计状态观测器观测所有状态;(7)设计降阶状态观测器;(可选)(8)最优控制;(9)体会及对课程建议。
1实际物理模型:如图1所示,为一交接车前后连接振动简化模型。
设计一个调节器系统使得在无扰动的情况下,系统保持在零位置上(y1=0)。
其中m1=1,m2=2,k=36,b=0.62系统的描述方程:)()(m )()(m 212122121211y y b y y k yu y y b y y k y-+-=+-+-= 其空间状态模型为:设:。
,,,24132211y x yx y x y x ====[]⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡432121432143210001u 01003.03.018186.06.0-3636-10000100x x x x y y x x x x x x x x 3分析与求解过程:由根轨迹和特征根(a = -0.4500 + 7.3347i -0.4500 - 7.3347i -0.000 0 )知虽实根都为负数但都靠近零轴,是李雅普诺夫定义下的稳定,但存在震荡,所以把希望闭环极点配置在10-s ,10-s ,32-2-s ,322-s ===+=和把最小阶观测器希望极点配置在16-s ,15-s ==来改善系统的性能。
《现代控制理论》课后习题全部答案(最完整打印版)
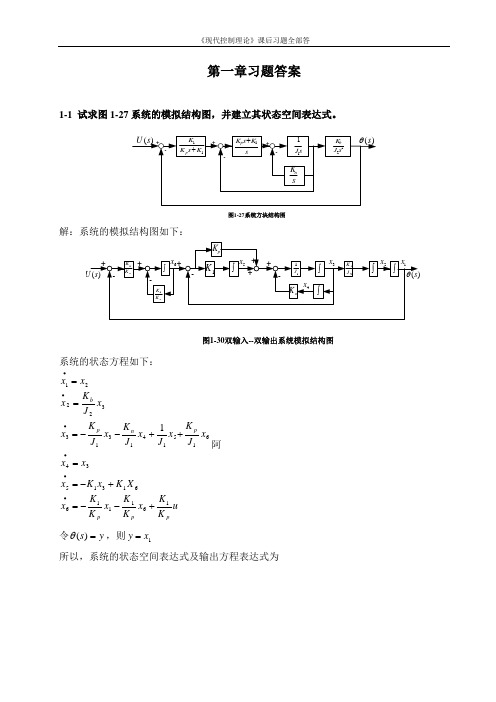
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
北航-现代控制理论结课大作业

1. 控制系统任务的物理描述为了满足飞机品质的要求,飞机的纵向运动和横侧向运动都需要有能够连续工作的阻尼器,以用来调整飞机的飞行姿态,避免其出现不必要的俯仰和倾斜。
维持飞机纵向运动的阻尼器称为俯仰阻尼器,维持飞机横侧向运动的阻尼器称为偏航阻尼器。
本次课程大作业旨在通过运用Matlab 的经典控制系统设计工具对某型飞机偏航阻尼器进行控制系统的设计。
2. 控制系统对象的数学模型巡航状态下,某型飞机侧向运动的状态空间模型为:111121314111222122232421221313233343132234142434441424()1()()()()2()()()3()()4t x t a a a a b b t x t a a a a b b u t a a a a b b u t x t t a a a a b b x t t x x x x ••••⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦ 1111213141221222324234()()()()()()x t c c c c y t x t c c c c y t x t x t ⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦式中: 1()x t :侧滑角(单位为rad )2()x t :偏航角速度(单位为/rad s )3()x t :滚转角速度(单位为/rad s )4()x t :倾斜角(单位为rad )输入向量及输出向量分别为:1()u t :方向舵偏角(单位为rad )2()u t :副翼偏角(单位为rad )1()y t :偏航角速度(单位为/rad s )2()y t :倾斜角(单位为rad )设飞机巡航飞行时的速度为0.8马赫,高度为40000英尺,此时模型的参数为:0.055800.99680.08020.04150.598000.11500.031803.050000.38800.4650000.0805 1.00000A --⎡⎤⎢⎥--⎢⎥=⎢⎥--⎢⎥⎣⎦ 0.007290.00000.475000.007750.15300.1430000B ⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦0 1.000000 1.0C ⎡⎤=⎢⎥⎣⎦0000D ⎡⎤=⎢⎥⎣⎦首先输入飞机状态空间模型参数。
《现代控制理论》第三版 第三章.习题答案.pdf
0 1 0 0 1 0 Rc 1 0 0 0 0 0
,
求
得
1 0 0 1 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0
1
0
0
0 0
Rc1
0 0
0 0
0 0 0 1 0 1 1 0
0 1 1 0 0 0
1 0 0 0 0 0
0
0
1
1
1
1
0
,
0
0
0
Co 0m
0m
Im
0 0
0 0
0 0
0 0
1 0 0 1
第二步: 判别该能观标准型实现的状态
是否完全能控。
M Bo Ao Bo Ao2Bo
0 0 0 0 0 0
0 1 0 0 0 0
1 0
0 0
0 1
本章问题:
1. M b Ab An1b ,n的确定(维 数应为 A 阶数)。 2.矩阵、向量写法的区分。
3.3-3(3) 2、 3讨论较复杂。
W (s)
s2 s2
6s 4s
8 3
1
s2
2s 5 4s
3
所以其能控标准 I 型为
A
0 3
1 4
b
0 1
c
5T 2
d
1
所以其能观标准 II 型为
A
0 3
1 T 4
b
5 2
c
现代控制理论习题解答(第四章)

第四章 控制系统的稳定性3-4-1 试确定下列二次型是否正定。
(1)3123212322212624)(x x x x x x x x x x v --+++= (2)232123222126410)(x x x x x x x x v ++---= (3)312321232221422410)(x x x x x x x x x x v --+++= 【解】: (1)04131341111,034111,01,131341111<-=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数不定。
(2)034101103031,0110331,01,4101103031<-=--->=--<-⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=P 二次型函数为负定。
(3)017112141211003941110,010,1121412110>=---->=>⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=P 二次型函数正定。
3-4-2 试确定下列二次型为正定时,待定常数的取值范围。
312321231221211242)(x x x x x x x c x b x a x v --+++=【解】:312321231221211242)(x x x x x x x c x b x a x v --+++=x c b a x T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=1112121110212111,011,0111111>---->>c b a b a a 满足正定的条件为:⎪⎩⎪⎨⎧++>+>>1111111114410ca b c b a b a a3-4-3 试用李亚普诺夫第二法判断下列线性系统的稳定性。
;1001)4(;1111)3(;3211)2(;1110)1(x x x x x x x x ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--=【解】: (1)设22215.05.0)(x x x v +=⎩⎨⎧≠≤==-=--=+=)0(0)0(0222221212211)(x x x x x x x x x x x x x v为半负定。
现代控制理论大作业
现代控制理论大作业现代控制理论大作业1.解:(1).选取状态变量为:x1=y, x2=y’,x3=y’’由题可得:a2=1 , a1=4, a0=5所以x3’=-5x1-4x2-x3+3u系统的状态方程为:x1’=x2x2’=x3x3’=-5x1-4x2-x3+3u输出方程为:y=x1将微分方程表达为矩阵形式即得其状态空间表达式:[x1’; x2’; x3’]=[0,1,0;0,0,1;-5, -4, -1][x1;x2;x3]+[0;0;3]uy=[1, 0, 0][x1;x2;x3](2).选取系统的状态变量为:x1=y-h0ux2=x1’-h1u=y’-h0u’-h1ux3=x2’-h2u=y’’-h0u’’-h1u’-h2u 由题可得:a0=0, a1=3/2, a2=0b0=-1/2, b1=0, b2=1/2, b3=0所以:[h0;h1;h2;h3]=[1 0 0 0;0 1 0 0;3/2 0 1 0;0 3/2 0 1]^-1*[0 ;1/2;0 ;-1/2]=[0;1/2;0;-5/4]取状态变量为:x1=y-h0u=yx2=x1’-h1u=x1’-1/2ux3=x2’-h2u=x2’所以该系统的状态空间表达式为:[x1’;x2’;x3’]=[0 1 0;0 0 1;0 -3/2 0][x1;x2;x3]+[0;1/2;0;-5/4]uy=[1 ,0, 0][x1;x2;x3](3)由题可得:a2=2, a1=3, a0=5;b3=5, b2=0, b1=0, b0=7所以[h0;h1;h2;h3]=[1 0 0 0;2 1 0 0;3 2 1 0;5 3 2 1]^-1*[5;0;0;7] =[5;-10;5;2]取状态变量为:x1=y-h0u=y-5ux2=x1’-h1u=x1’x3=x2’-h2u=x2’所以该系统的状态空间表达式为:[x1’;x2’;x3’;]=[0 1 0;0 0 1;-5 -3 -2][x1;x2;x3]+[5;-10;5;2]u2.经典控制理论是建立在常微分方程稳定性理论和以拉普拉斯变换为基础的根轨迹和奈奎斯特判断理论之上。
现代控制理论大作业
控制理论:控制理论是讲述系统控制科学中具有新观念、新思想的理论研究成果及其在各个领域中,特别是高科技领域中的应用研究成果,但是在民用领域即实际生活中有很严重的脱节。
飞行器控制技术的进步是与自动控制理论的发展密切相关的。
控制理论在飞行器控制技术方面获得了广泛的应用,取得了许多重要成果。
现代控制理论:建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。
在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。
现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。
它所采用的方法和算法也更适合于在数字计算机上进行。
现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。
发展过程:现代控制理论是在20世纪50年代中期迅速兴起的空间技术的推动下发展起来的。
空间技术的发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题。
这类控制问题十分复杂,采用经典控制理论难以解决。
1958年,苏联科学家Л.С.庞特里亚金提出了名为极大值原理的综合控制系统的新方法。
在这之前,美国学者R.贝尔曼于1954年创立了动态规划,并在1956年应用于控制过程。
他们的研究成果解决了空间技术中出现的复杂控制问题,并开拓了控制理论中最优控制理论这一新的领域。
1960~1961年,美国学者R.E.卡尔曼和R.S.布什建立了卡尔曼-布什滤波理论,因而有可能有效地考虑控制问题中所存在的随机噪声的影响,把控制理论的研究范围扩大,包括了更为复杂的控制问题。
几乎在同一时期内,贝尔曼、卡尔曼等人把状态空间法系统地引入控制理论中。
状态空间法对揭示和认识控制系统的许多重要特性具有关键的作用。
其中能控性和能观测性尤为重要,成为控制理论两个最基本的概念。
现代控制理论课后习题答案
前言本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
编者 2005年5月第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
现代控制理论试题(详细答案)
一、 1 系统 x
21 x
0 u, y
0 1 x能控的状态变量个数是
cvcvx ,
02
1
能观测的状态变量个数是 cvcvx 。 2 试从高阶微分方程 y 3y 8 y 5u 求得系统的状态方程和输出方
程( 4 分/ 个)
解 1 . 能控的状态变量个数是 2,能观测的状态变量个数是 1。状
观的,请画出观测器设计的框图,并据此给出观测器方程,观测器设
计方法。
解 观测器设计的框图:
观测器方程:
~x Ax~ Bu L( y Cx) ( A LC )x~ Bu Ly
其中: ~x 是观测器的维状态, L是一个 n×p维的待定观测器增益矩阵。
观测器设计方法:
由于
det[ I ( A LC )] det[ I ( A LC )T ] det[ I ( AT CT LT )]
et
0
0
0
et
0 ……… . ……… . (2 分)
0 e2t et e2t
(2 分)
et
0
01
0
et
00
0 e2t et e2 t 1
et
0 …………… .. ……… .
e2t
《现代控制理论》复习题 1
一、( 10分,每小题 2分)试判断以下结论的正确性,若结论是正确 的,则在其左边的括号里打√,反之打×。
的特征值都具有负实部是一致的。
( √ )5. 根据线性二次型最优控制问题设计的最优控制系统一定
是渐近稳定的。
二、( 15分)考虑由下式确定的系统:
s3 G( s) s2 3s 2
试求
其状态空间实现的能控标准型、 能观标准型和对角线标准型, 并画出
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
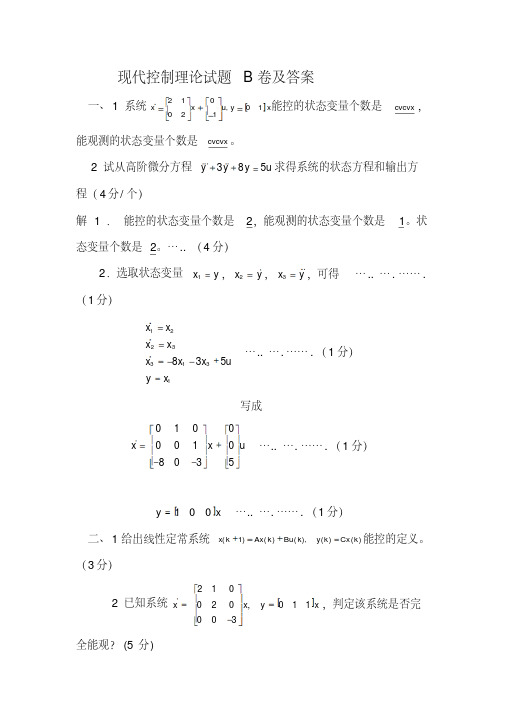
Control law −K
Observer ˙ = Ax x ˜ ˜ + Bu + Ly ˜ y ˜ = y − Cx ˜ + −
C Compensator
Figure 1.
3
4. Consider the system represented in state variable form x ˙ = Ax+Bu y = Cx+Du where A= 1 2 −5 −10 ,B= −4 1 , C = ( 6 −4 ) and D = ( 0 ).
Verify that the system is observable and controllable. If so, design a full-state feedback law and observer by placing the closed-loop system poles at s1, 2 = −1 ± j and the observer poles at s1,2 = −10.
1
Name:
Number:
3. A system has a matrix differential equation ˙= x 0 1 2 0 x+ b1 b2 u
What values for b1 and b2 are required so that the system is controllable?
˙ = x
x +
u
2. Consider a system with state-space model given below. −3 1 0 1 ˙ = 0 −3 1 x + 0 u x 0 0 −3 1 a1 0 0 y = x 0 1 0 a) Is the system observable? Does it depend on a1? b) Find the range of values of a1 for which the system is observable? c) Is the system controllable? Does it depend on a1?
Design a full-state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at s1,2 = −1.4 ± j 1.4, s3,4 = −2 ± j and the observer poles s1, 2 = −18 ± j 5, s3, 4 = −20. Construct the state variable compensator using Figure 1 as a guide and simulate the closed-loop system using Simulink. Select several values of initial states and initial state estimates in the observer and display the tracking results on an x, y -graph.
Name:
Number:
Modern Control Theory and Application - Homework 3 1. A state-space model of a system is given below. Is the model controllable? −2 1 0 0 0 0 −2 0 0 0 0 0 −1 0 0 0 0 0 −5 0 0 0 0 0 −4 0 2 1 1 2
2
e:
Number:
5. Consider the system in state variable form 0 1 0 0 0 0 1 0 x + ˙ = x 0 0 0 1 −2 −5 −1 −13 y = ( 1 0 0 0 )x+( 0 )u 0 0 u 0 1