(完整版)宝元LNC-M528A系统参数
宝元数控精密股份有限公司LNC-M528A硬件说明书

A1 安川伺服接线范例 ............................................................................................................................................... 30 A2 松下伺服接线范例 ............................................................................................................................................... 32 A3 三菱伺服接线范例 ............................................................................................................................................... 34
A-系统架构图............................................................................................................................................................... 40 B-主动力线 ................................................................................................................................................................... 47 C-控制回路接线........................................................................................................................................................... 49 E- ONOFF ...................................................................................................................................................................... 50 F-主轴端子界面 ........................................................................................................................................................... 51 I-INPUT 接线 ................................................................................................................................................................ 52 O-OUTPUT 接线........................................................................................................................................................... 54 P-伺服主动力 ............................................................................................................................................................... 56 BK-伺服驱动器动力煞车 ........................................................................................................................................... 61
宝元 m520i 系统使用手册 简体中文版

操作手冊
2010/5 版本:V04.00.001(4408210042)
Leading Numerical Controller
LNC Technology Co., Ltd.
LNC-M520 系列
目
錄
目
錄
概要.......................................................................................................... 1
2.4.1 絕對座標畫面..................................................................................................................25 2.4.2 相對座標畫面..................................................................................................................26 2.4.3 機械座標畫面..................................................................................................................27 2.4.4 座標量測.........................................................................................................................28 2.4.5 離開系統畫面..................................................................................................................29 2.5 程式機能(PROG)....................................................................................................................30 2.5.1 現行程式.........................................................................................................................31 2.5.2 背景程式.........................................................................................................................37 2.5.3 檔案總管.........................................................................................................................38 2.5.4 程式核對.........................................................................................................................44 2.5.5 手動輸入.........................................................................................................................45 2.5.6 通訊連線(RS232).......................................................................................................46 2.5.7 DNC 直接傳輸加工功能.................................................................................................50 2.6 補正機能(OFFSET) ................................................................................................................51 2.6.1 刀具補正.........................................................................................................................51 2.6.2 巨集變數.........................................................................................................................52 2.6.3 座標系設定 .....................................................................................................................53 2.7 銑床 EASY-CAM .........................................................................................................................55 2.7.1 前言 ................................................................................................................................55
LNC 系列控制器参数设定

主軸參數驗證方式
將主軸轉速的顯示設為實際值(參數0090號 設為1),檢查是否和命令值相符. 檢視輸出電壓: 馬達轉速 = 主軸轉速 / 齒比, 輸出電壓 = 馬達轉速 / 參數0092號 * 10.
伺服軸齒比、節距
機械類(以X軸為例)
參數0068號:X軸馬達側齒數(齒比分母值). 參數0100號:X軸螺桿側齒數(齒比分子值). 參數0104號:X軸導螺桿節距,單位um. 設定說明:依實際機台傳動機構設計規格設定 之.
伺服軸參數驗證方式
以X軸為例
將手輪上軸向選擇旋到 X 軸、倍率旋到 100 ,此 時每轉動手輪一格,X軸即移動0.1mm. 先檢視馬達driver位置迴路增益(1/sec)之設定值, 再以Jog方式移動X軸,觀察在等速運動下,X軸 的進給率、 servo lag(系統資訊000號)以及位置 迴路增益三者之間是否符合下列關係: servo lag ≈ Feedrate / 位置迴路增益值
參數0024號:X軸對應之伺服軸號碼. 參數0025號:Y軸對應之伺服軸號碼. 參數0026號:Z軸對應之伺服軸號碼. 參數0027號:第四軸對應之伺服軸號碼. 設定說明:若 X 軸接線接到轉接板上的第 N 軸, 則參數 0024 號設為 N ;若沒有接馬達則設為 0 . 餘軸類推.建議值:X軸設為1,Y軸設為2,Z軸 設為3,若有第四軸則設為4,若無則設為0.
伺服軸移動方向(contd.)
參數0185號:設定各伺服軸Encoder回授訊號是否反向. 設定說明:Bit0 ~ 3分別用以設定X ~ 第四軸encoder回授 訊號是否反向.若Bit0設為0,代表X軸encoder回授訊號不 反向;若設為 1 ,代表 X 軸 encoder 回授訊號反向.餘軸類 推.若要讓X、Y軸encoder回授訊號反向,則此參數設定應 為3. 使用時機:以X軸為例,當按下OP面板上 +X 鍵,X軸有移 動,但在放開按鍵後,X軸的servo lag(可由系統資訊000號 觀察)卻不會減少至0,且按 +X 鍵越多次,X軸的servo lag 就越大,到最後觸發 servo lag overflow 警報.若 X 軸為 V command 控 制 , 則 是 會 造 成 暴 衝 現 象 . 此 時 代 表 X 軸 encoder訊號方向和控制命令方向相反,將此參數Bit0設為1 即可解決.此現象通常導因於參數0116號的Bit0被設為1.
宝元系统手册 M500 繁体中文程式手册V1_2_0

功能說明 快速定位 直線插值
順時鐘圓弧插值 逆時鐘圓弧插值
暫停 正確停止 資料輸入設定 極座標指令取消 極座標指令 XY 平面選擇 ZX 平面選擇 XZ 平面選擇 英制指令 公制指令 刀具行程極限 ON 刀具行程極限 OFF 參考點復歸檢查 參一參考點自動復歸 第二、三、四參考點自動復歸 刀鼻半徑補正取消 刀鼻半徑補正偏左 刀鼻半徑補正偏右 刀長補正正方向 刀長補正負方向 刀長補正取消 放大縮小指令取消 放大縮小指令 區間坐標系設定 機械坐標系設定 工作坐標系統 1〜6 選擇 正確停止模式 一般切削模式 單一巨程式呼叫 模式巨程式呼叫 模式巨程式呼叫取消 座標旋轉指令 座標旋轉指令取消
圖例:
Y G90 G01 X200. Y100. F200. ;絕對
5.1 巨集指令的功能簡介 ................................................................................................... 5-1 5.2 呼叫 MACRO 程式........................................................................................................... 5-2
09
03 03 00 05 05 10 10 以下皆爲巨集Fra bibliotek1-2
2 一般 M 碼機能表
M碼 M00 M01 M02 M03 M04 M05
M06 Txx M08 M09 M10 M11 M19 M25 M26 M28 M29 M30 M40 M41
M90 Txx M91 Txx
M95 M98 M99
MWG.52控制系统说明书

质量保证
............................................... 18
S. p. A.
Controlli Industriali
注意
(BOSENSE LIMITED / CHINA)用户手册
本手册记录了访产品的适用领域和其应用场所,技术特点、安装要求、设置和功能的有关说明,适用于本设备的 用户和安装人员。 本手册是与产品一同发售,请保持其完整的送至最终用户手中。 设计人员可将本手册中的内容集成至自已系统说明书中。 Re S.P.A 公司保留产品和手册升级的权利,对已售出产品和手册不进行升级。 本产品是需安装的部件,在安装时应满足当地的安装要求和条例。 本产品需由专业技术人员进行安装和设置。 本产品能手动移动。
导向系统“WG.700” 尺寸 ...................... 16
超声波或红外线传感器尺寸 .................... 17
CCD传感器尺寸 ....................................... 17
宝元528A操作手册

1.7
銑床圖形對話式 ................................................................................................................................110
寶元數控精密股份有限公司 LNC Technology C.......................................................................................................................... 80 1.5.1 1.5.2 1.5.3 1.5.4 1.5.5 刀具補正 ............................................................................................................................... 80 溫昇補償 ............................................................................................................................... 81 巨集變數 ............................................................................................................................... 82 座標系設定 ........................................................................................................................... 84 刀具登錄 ............................................................................................................................... 88
宝元LNC 安川SimgaV参数设定调机说明

LNC調整YASKAWA Σ-V Series說明 1.0版賴宜宏注意:進行安川SigmaWin+ English Edition軟體前,請先確實依照『技術文件_M-II數位通訊功能_V0.1.doc』執行相關設定,確保【M-II伺服軸】【M-II主軸】相關參數的設定,【M-II伺服軸與主軸的SERVO ON/OFF控制】可以搭配PLC使用者參數的A bit做SERVO ON/OFF控制比較方便,如下圖:調機前相關說明:1.慣量比:每台CNC機床的X軸Y軸Z軸負載都不同,因此3軸的慣量比請使用SigmaWin+ 軟體去抓取各軸慣量比,各軸驅動器參數Pn103都不一樣。
2.安川驅動器參數設定:每台CNC機床的X軸Y軸Z軸剛性與反應都不同,通常使用SigmaWin+ 軟體抓取到的驅動器參數後,會將3個軸向之中負載最大的軸向當做基礎,也就是說如果Z軸的慣量比最大負載也就最重,那麼Autotunin g只要Z軸就可以了,因此請將X軸與Y軸驅動器參數所有全部參數都設成與Z軸伺服參數相同這樣加工才不會產生問題,除了剛剛所說的Pn103不一樣之外。
3. 調機前,請將控制器參數1932設為0,採用AI C,R10等級調機,建議如下參數數值參數數值參數數值參數數值408 10 701 35 705 200000 1004 10000000 422~424 100 702 0 710~712 400000 429 2 437~439 0 703 25 730 200000 407 0 700 100 704 1200000 731~733 95一、SigmaWin+ 連線1.點選,將USB調機線連接到驅動器的CN7。
2.Connect使用Online 搭配USB 再按下Search。
注意:如果沒有安裝SigmaWin+ USB驅動程式,則無法使用USB選項3.選取ΣV打勾,搭配USB在Search,等待掃描後會出現所連接的驅動器。
宝元程式操作说明书3

3.1 G代码概要3.2 定位(G00)3.3 直线切削(G01)3.4 圆弧切削/螺纹切削(G02、G03)3.5 无运动时间(G04)3.6 准确定位校验(G09、G61、G64)3.7 输入可编程数据(G10)3.8 软限程3.9 返回到工作原点(G28)3.10 自工作原点开始的返回(G29)3.11 返回到第2、第3、第4工作原点(G30) 3.12 选择机械坐标系(G53)3.13 选择工件坐标系(G54~G59)3.14 选择追加工件坐标系(G54.1)3.15 坐标旋转功能(G68、G69)3.16 使用测量结果坐标旋转(G168)3.17 绝对位置坐标指令与相对位置坐标指令(G90、G91)3.18 设定工件坐标系(G92)3.19 测量进给(G131、G132)3.20 攻丝转向的转换3.21 (G133、G134)G代码优先顺序3.1 G代码概要G代码以地址字母G后3位内的数字指令此程序段执行何种功能。
G代码有以下2种不同的有效范围。
有*的接通电源时即为常态。
(注)坐标计算功能在第6章说明。
(注)刀具直径补正在第4章说明。
有*的接通电源时即为常态。
(注)刀具长度修正在第4章中说明。
有*的接通电源时即为常态。
(注)固定循环在第5章中说明。
有*的接通电源时即为常态。
(注)G120~G129指令在操作说明书的选购的「自动测量」中说明。
3. 2 定位(G00)从现在位置到终点位置,各轴分别以快速进给方式移动。
也就是说,刀具的运动轨迹不一定是直线。
指令形式没有选购附加轴,而对附加轴发出指令时,发生报警。
刀具轨迹终点起点03L01.ai(注1)限定位置中校验是指确认现在位置是否在指定(终点)位置的范围之内。
(由机械参数设定各轴的限定位置中的范围。
)(注2)由机械参数设定各轴的快速进给速度。
也就是说,不能以F指令来指定快速进给速度。
3. 3 直线切削 (G01)从现在位置到终点位置以指定的进给速度作直线移动指令形式X 、Y 、Z 、A 、B 、C 轴内任意2轴可同时指令。
LNC-M500操作手册
LNC-M500系列铣床控制器操作手册宝元科技股份有限公司POU YUEN TECHNOLOGY CROP.1-2目录1 LNC 500概要................................................................1-1 1.1 硬体规格..............................................................1-1 1.2 软体规格................................................................ 1-2 1.3 G码表................................................................. 1-31.4 一般M码机能表...........................................................1-42 CNC操作...................................................................2-1 2.1 操作装置种类.............................................................2-1 2.1.1 操作装置介绍.........................................................2-1 2.2 画面及功能说明......................................................2-32.2.1 显示画面的布置.........................................................2-3 2.2.2 各机能群组功能...............................................2-42.2.3 座标机能(POS)......................................................2-92.2.4 程式机能(PROG)......................................................2-14 2.2.5 补正机能(OFFSET)......................................................2-21 2.2.6 诊断机能(DGNOS).......................................................2-242.2.7 PARAM参数.......................................................2-343 控制面板操作..............................................................3-1 3.1 电源开 / 关............................................................3-1 3.2 紧急停止键(EMG-STOP).....................................................3-1 3.3 程式启动(CYCLE START)....................................................3-2 3.4 程式暂停(FEED HOLD)....................................................3-3 3.5 LED 灯号(LED SIGNAL).....................................................3-3 3.6 模式选择(MODE SELECT)....................................................3-3 3.7 单节停止.................................................................3-4 3.8 轴向选择(AXIS SELECTION).................................................3-5 3.9 主轴操作键(SPINDLE ROTATION)..........................................3-5 3.10 过行程释放(OT RELEASE)..................................................3-6 3.11 切削水开关(COOLANT SUPPLY)..............................................3-6 3.12 刀塔(TOOL MAGAZINE )....................................................3-7 3.13 附加功能选择............................................................3-7 3.14 进给率 / 快速位移速率调整钮............................................3-7 3.15 轴速率调整钮............................................................3-8 1-34 附录一...................................................................4-11-11 LNC 500概要LNC 500 系列PC-BASED控制器,是宝元科技精密控制部,依据CNC铣床之功能需求,研发多年而获致的高性能控制器,有稳定,高速,高精度之特性,更具备友善的操作介面.本手册将依序介绍关於LNC M500的相关设定与操作方式.1.1 硬体规格表 1-1 硬体规格LNC M500 规格显示器 5.7"STN 液晶显示器动态存取记忆体 (DRAM RAM) 32M bytes或以上CF卡 32M bytes 或以上软式磁碟机 3,5" 1.44 M bytesPC主机板 (CPU BOARD) 工业级PC板主轴系统提供Pulse控制加DA输出讯号输入点/输出点(最大) 144 Input / 144 Output(串列输出)伺服系统提供Pulse 位置回路控制直接资料传输 (DNC) RS232 19200 Baud Rate操作面板标准铣床专用面板MPG 手轮操作型面板三合一MPG可控轴数 4 轴直线插补同动轴数 3轴圆弧插补同动轴数 2轴手轮可控轴数 3 轴主轴数 1 轴最小输入单位0.001mm0.0001inch0.001 deg最小命令值0.001mm0.0001 inch0.001 deg1-21.2 软体规格表 1-2 软体规格LNC M500 规格作业系统 DOS档案格式 DOS FAT程式规格一般G,M码程式巨集程式机能模式种类 EDIT (程式编辑模式)MEM (自动模式)MDI (手动输入模式)JOG (连续寸动模式)MPG (手摇轮模式)RAPID (快速定位模式)HOME (回参考点模式)画面群组机能 (POS)座标位置机能(PROG)程式机能(OFFSET)补正机能(DGNOS)诊断机能(PARAM)参数机能MLC(Machine Logic Controller) I/O/C/S/A BIT 计时器/计数器/暂存器使用语文繁体中文/简体中文/英文1-31.3 G码表表 1-3 G码表G码功能说明群组G00 快速定位 01G01 直线插值 01G02 顺时钟圆弧插值 01G03 逆时钟圆弧插值 01G04 暂停 00G09 正确停止 00G10 资料输入设定 00G15 极座标指令取消 17G16 极座标指令 17G17 XY平面选择 02G18 ZX平面选择 02G19 XZ平面选择 02G20 英制指令 06G21 公制指令 06G22 刀具行程极限ON 00G23 刀具行程极限OFF 00G27 参考点复归检查 00G28,G29 参一参考点自动复归 00G30 第二,三,四参考点自动复归 00G40 刀鼻半径补正取消 07G41 刀鼻半径补正偏左 07G42 刀鼻半径补正偏右 07G43 刀长补正正方向 08G44 刀长补正负方向 08G49 刀长补正取消 08G50 放大缩小指令取消 11G51 放大缩小指令 11G52 区间坐标系设定 14G53 机械坐标系设定 14G54 G59 工作坐标系统1 6选择 141-4G码功能说明群组G61 正确停止模式 15G64 一般切削模式 15G65 单一巨集程式呼叫 12G66 模式巨集程式呼叫 12G67 模式巨集程式呼叫取消 12G68 座标旋转指令 16G69 座标旋转指令取消 16G73,G74,G76,G80~G89固定回圈切削(钻孔,攻牙) 09G90 绝对指令 03G91 增量指令 03G92 坐标系统设定 00G94 每分钟进给量设定mm/min. 05G95 每分钟进给量设定mm/rev. 05G98 复归到初始点 10G99 复归到R点 101.4 一般M码机能表表 1-4 一般M码机能表M 码机能备注M00 程式暂停 Program stop CNCM01 选择性程式暂停 Optional stop CNCM02 程式结束 End of program CNCM03 主轴正转 Spindle CWM04 主轴反转 Spindle CCWM05 主轴停止 Spindle stopM06 自动换刀 Auto tool changeM08 开切削液 Coolant ONM09 关切削液 Coolant OFFM30 程式结束并返回开头 Program rewind CNCM98 呼叫副程式 Calling of subprogram CNCM99 由副程式返回主程序 End of subprogram CNC2-12 CNC操作2.1 操作装置种类就操作者所操作的面板来说,区分为MDI资料输入面板及操作面板.MDI资料输入面板的主要功用是让使用者可以逐字编辑或修改程式以及设定数值.而操作面板是为了达成加工之各种需求所使用的控制面板,上面置有许多不同功能的开关,按键以及脉波产生器(手轮)等等.本公司所设计的面板是把MDI资料输入面板和操作面板整合在一块.2.1.1 操作装置介绍以下我们仅以LCD液晶显示器之资料输入面板作介绍.在资料输入面板上所看到的键,依功能可分为3类:(1)主功能键:在LCD的正下方,有6个横式按键.它们是用来让使用者输入对应於显示萤幕下方的功能选择.(2)机能族群选择键:在LCD的右方有五个按键,可选择5种机能,分别是POS,PROG,OFFSET,DGNOS,和PARAM.:各种座标显示画面族群.:所有与程式相关资讯画面.:刀具补偿的设定.:显示诊断画面的即时讯息.:显示参数画面.(3)文字符号键:这些字母符号及数字主要是作为程式编辑及资料输入用.其中有一些符号被缩小在按键的右下角,要使用这些缩小的符号,须同时压下SHIFT键和该文字符号键.见图2.1-1:2-2图 2.1.1–1 操作介绍说明主功能键机能族群选择键文字符号2-32.2 画面及功能说明关於基本操作的说明,基本上我们仍将其区分五个部分: 座标,程式,补正,诊断,参数等. 我们使用【…】来表示萤幕下方主功能键,以表示MDI资料输入面板上的按键,以免使用者在对照参考时产生混淆.2.2.1 显示画面的布置图 2.2.1–1 显示画面布置显示画面布置1: 目前指定程式名.2: CNC模式讯息3: 机械状态讯息.4: 错误警报讯息(Alarm).5: 主功能键提示.6: 输入区.7: 软键功能指示列8: 讯息提示列1 2 4 356782-42.2.2 各机能群组功能位置座标功能键图 2.2.2–1 位置座标架构图清X清Z全清机械POS清Y核对手动量测设X设Y设Z全设相对绝对2-5程式编辑功能键图 2.2.2–2 程式编辑架构图通讯协议PROG现行定位删列标示取消下页拷贝删除总管拷贝更名开档返回设定剪下贴上上页返回返回2-6补正画面功能键图 2.2.2–3 补正画面架构图OFFSET刀补座标变量设X设Y设Z全设返回2-7诊断画面功能键返回I/O I点 O点C点 S点A点DGNOS警报讯息警报警告历程RG.D 计时计数 RG.RMLC2资讯诊断讯息统计返回升级返回返回2-8参数画面功能键图 2.2.2–5 参数画面架构图系统PARAM伺服机械主轴手轮补偿原点操作其他上页下页返回用户软键锁定忽略空跑跳跃暂停重启手轮返回权状密码解锁上锁返回下页上页返回设定2-92.2.3 座标机能(POS)压键,进入座标显示画面,我们会看到六个主功能键选项可供选择,分别是【绝对】,【机械】,【相对】,【量测】,【核对】,【手动】六种画面选择.在这些画面中有几个共同显示的资讯,分别说明如图2.2.3-1所示:1. 实际进给速率:伺服机构的进给速度,是三个伺服轴的复合速度.2. 实际主轴转速:当时主轴的实际转速.3. 伺服进给率4. 主轴转速百分率5. F0:当进给率调为F0时,在软功能键指示列将秀出F0,在MEM,MDI,JOG模式下速度为零,在RAPID模式下是以参数所设定值为实际速度的.F0是在参数40号是设定.SBK:在MEM mode自动执行时,按下SBK按钮,此讯号为ON,则在单一BLOCK执行结束后,系统会停止,STL讯号OFF,系统状态为B_STOP,必须等Cycle start(ST)讯号ON后再执行下一个BLOCK.BDT:在MEM mode自动执行且此讯号ON时,若要程式中有"/"出现,则其后至EOB之间的输入将被忽略.DRN:在MEM或MDI mode时,若此讯号ON,则程式所下之进给率进行:GOO:当RT为ON=快速进给率(RAPID feed)当RT为OFF=手动进给率(JOG feed)G01:手动进给率(JOG feed)MLK:在手动及自动mode下,所有移动命令不送至位置控制伺服系统,但软体插值仍执行, 所以程式座标仍会更新.123452-10OPS:若此讯号为ON,则在程式执行遇到M01时,系统会暂停,STL讯号OFF,待按下Cycle Start(ST)后再继续执行.绝对座标画面压下【绝对】,进入绝对座标主画面.图 2.2.3–2 绝对座标画面绝对座标就是程式座标,机械座标值-刀具补正量-(G54~G59座标偏移值)= 绝对座标值. 机械座标画面压下【机械】,进入相对座标主画面.图 2.2.3–3 机械座标画面机械座标是目前位置相对於原点的距离.每一个机台都有自己的原点,为了安全起见,每次重新开机都必须先寻求原点后,才能进行加工.2-11相对座标画面压下【相对】,进入相对座标主画面.图 2.2.3–4 相对座标画面相对座标系统表示的是现在位置与使用者所决定的任意点的距离,所以使用者可以随时将相对座标值归零,也可以用非零的数值直接输入.如果想重设座标值,使得X座标为100.000,Y座标为200.000和Z座标为300.000,只要输入X100. Y200. Z300.后再压,座标值立刻被重置.座标量测对於程式原点的设定,本控制器提供二种程式座标的设定方法,其一为在【座标】输入机械座标去定义定程式原点的位置,其二为利用G92去定义,本功能页【量测】是采后者,为以刀具就地所在的位置来设定新的座标系统之原点,此原点所构成的座标系统即是加工座标系统,一经设定之后,绝对值指令即参考此座标系统来计算,本系统提供了如图示的设定方法. 图 2.2.3–5 座标量测画面【设X】 : 设定X轴绝对座标2-12压【设X】,设定X座标值成为G92所设定的X值.范例: 在手动输入模式输入.1.输入10.2.按INPUT此数值将被设入G92的X值.3.压【设X】,X的绝对座标值将变成10.程式核对压下【核对】,进入程式核对主画面旁边是【绝对座标】,【余移动量】的次画面.左下方F是进给速率(命令值);S为主轴转速(命令值);F Rate 为伺服进给率.S Rate 为主轴转速百分率;图 2.2.3–6 程式核对主画面手动输入压下【手动】,进入手动输入主画面.2-13图 2.2.3–7 手动输入主画面手动输入模式下,可以输入单一单节并执行的方式作动.若使用者键入单一动作指令后,压,这指令将会出现在主萤幕区的左半部,然后压启动(Cycle Start)键,此指令将立即被执行,并显示相关的资讯.这种方式来做测试动作,一方面比较安全,另一方面也节省时间.(MODAL):为目前所作用G码群组.2-142.2.4 程式机能(PROG)压进入程式相关显示画面.程式编辑模式(EDIT)下,画面显示现行程式内容,可以直接编辑程式内容,开启其他加工程式或作档案删除或复制等处理.图 2.2.4–1 程式机能主画面2.2.4.1 基本编辑功能说明在编辑模式下,功能键选项会是一些与加工程式有关的编辑功能.【现行】显示全萤幕的线上程式内容,此功能只在编辑模式下方可执行.【总管】将磁碟机中加工程式目录区的程式名一览列出,以供使用者选择.如果使用者在程式开头的第一行加注如 /*ABCDE*/的格式,则文字"ABCDE"会成为一览表中各程式的备注文字,与程式名同时显示.另有开档选择,复制,删除档案功能.在开档选择中,可开启一个新或旧有档案.新档案时,得先键入档名,如O0001,O1234….如果是开启旧档,则可利用游标选定程式,压下用以开启旧档,并进行编辑.【通讯】在编辑模式下,藉由RS232通讯介面,达到控制器与其他PC之间的档案传送或接收.2.2.4.2 现行按下【现行】主功能键显示如下画面,对应著【定位】,【删列】,【标示】,【取消】,【拷贝】, 【剪下】,【贴上】等子功能键.2-15图 2.2.4–2 【现行】功能主画面1图 2.2.4–3 【现行】功能主画面2【定位】按下右侧「定位」功能键后可直接在对话盒输入程式的"列"号数后按下【INPUT】, 使游标直接移到该列定位.(图2.2.4-4)【删列】可直接删除游标位置的一列程式码.【标示】将游标移动到欲标示的起始/结束列按下右方的「标示」功能键,再将游标移动到欲标示的结束/起始列的位置后再按一次「标示」功能键即可将标示欲标示的列数(图2.2.4-5).【取消】可取消前次的标示记号.【拷贝】对程式标示的区域范围进行复制.【剪下】剪下程式标示的区域范围.【贴上】贴上前次拷贝或剪下的标示区域的程式码.2-16图 2.2.4–4 定位输入栏画面图 2.2.4–5 标示功能画面2-172.2.4.3 总管当我们压下【总管】后,就会出现如下的画面.图 2.2.4–6 总管功能主画面【开档】档案选择.按下此子功能后,萤幕上会出现一个对话框,可选择欲开启档名,在EDIT 模式下,所开启档案为现行程式,其他模式下无法开档.【拷贝】档案拷贝.按下此子功能后,萤幕上会出现一个对话框,可选择来源档名,及复制后的新档名.复制完成后,使用者可以用程式一览表作确认.软式磁碟机亦可做为存取对象.【更名】变更档名.按下此功能键后,萤幕上会出现一个对话框,来选择欲更改档名的档案, 确定后会再出现一对话框,显示使用者选取档案的路径及档名,并提供一输入列让使用者输入想变更后的档名.变更后的档案路径可由使者者自订,也可以选择存放於软碟机上.变更完成后可以经由程式一览表中确认.【删除】删除档案.按下此功能后,萤幕上会出现一个对话框,来选择欲删除的档案.删除完成后,使用者可以用程式一览表作确认.【设定】变更工作目录的路径.按下功能键后,弹出一个对话盒,让使者输入或按上下键选择工作目录的路径.选择完后按左右键将游标移至输入列中按下确定功能键即可.2-182.2.4.4 通讯(RS232)在编辑模式下,使用者可以压【通讯】子功能键,达到控制器与其他PC之间的档案传送或接收.按下【通讯】如图2.2.4-4.图 2.2.4–7 通讯主画面图 2.2.4–8 控制器与其他PC之间的档案传送或接收示意图[SEND][OPENFiles[SAVEASTurning 600CNCProgram store device MMI External PC[RS232]FilesFilesFiles2-19在功能键中显示【传输】及【协议】两种功能.按下【传输】得图2.2.4-5.图 2.2.4–9 通讯\传输功能画面在使用RS232功能前,请确认接线是否已经妥当,而且RS232设定画面内容,与外部装置的设定一致.当看到RS232传输的视窗出现在萤幕上时,控制器即已随时准备好程式的接收,只要外部有程式传入,控制器会自行接收,并出现在视窗中,此时,传输的主动权在外部PC . 在使用者压【传输】后,画面中软键的选项变成【传送】,【读取】,【储存】,【清除】,【重置】,【取消】等功能键.各功能键的作用介绍如下:【传送】外部PC与控制器进行程式交换.【读取】控制器读取一个程式档案.【储存】当外部传入一个程式档案到控制器的RS232视窗中时,由此决定将档案存在控制器中的某暂存器的地方.【清除】放弃并清除在视窗中的程式档案.【重置】当控制器与外部PC在传输程式档案中的硬体重置.图 2.2.4–10 选择传输档案画面2-20其次,刚才提到的RS232的组态设定必须一致且正确,才能顺利进行RS232传输或所谓的DNC功能.按压子功能【协议】,将会出现RS232设定的视窗,并可藉游标移动来修改.图 2.2.4–11 通讯\协议功能画面Port:端口,在此一般设定为COM2Data Bit:数据位,在此一般设定为8_BitsStop Bit:停止位,在此一般设定为2_BitsParity Check:奇偶校验,在此一般设定为EvenBaud Rate:传输率,在此一般设定为9600Mode:模式,在此一般设定为TerminalCodes:编码,在此一般设定为ASCII注意的是此设定要与PC机一致.2.2.4.5 DNC 直接传输加工功能DNC 功能对CAD/CAM系统的使用者而言是一个相当有用的功能,由於控制器的储存记忆体容量一般都不大,所以CAD/CAM的程式可能无法一次载入,边传边做的DNC功能占重要地位. DNC的程式由於是边传边做,所以它不能由控制器编辑,也不能使用副程式呼叫或跳跃指令. 在T500系统中,已装有高容量的存储器,可采用将档案先行传入存储器再执行的方式,我们称此种方式为内部DNC方式.而边传边做的DNC功能仍然保留,我们称此种方式为外部DNC 方式,而且使用上也相当便利.现将程序说明如下:a. 对控制器与外部PC设定RS232组态,并将设定协调一致.b. 把模式拨至编辑.c. 在压下页或者在总管页或者开档选择页键入RS232,压下,程式档名将变为为RS232.把模式拨至MEM模式.按CYCLE START,让CNC等待程式的传入.d. 启动外部PC 的传出动作.e. 机械自动开始执行加工.2-212.2.5 补正机能(OFFSET)按进入补正机能画面,【刀补】,【变量】,【座标】.操作者可在手动资料输入模式且机械准备完成状态时修改这些设定.图 2.2.5–12.2.5.1 刀补按【刀补】键可进入以下画面,并且可在MDI模式下手动资料输入.图 2.2.5–2 补正机能主画面每次在工件程式中使用一刀具补正号码时,绝对座标将随著刀具补正值而变化,其值为:绝对座标值 = 机械座标值–G54~G59 偏移–刀具外形补正值移动游标光棒到欲设定的组号上,在手动资料输入模式(MDI)下输入设定值,再压写入控制器.2-222.2.5.2 变量按下【变量】键,进入巨集变数画面.在此功能中,变数可被输入或修改,但是输入或修改只有在「准备完成」,「机械暂停」,「区段停止」的状态下才可以进行.修改的方式是先将光棒移至欲修改之位置后,输入所要的值后再按下即可.其中L开头的变数是区域变数,C开头的变数是全域变数.图 2.2.5–3 变量功能主画面2.2.5.3 座标压软键【座标】,进入工件座标系的画面.一共有7组的工件座标系,分别代表G53到G59, 操作者可以在MDI的模式下,由游标标定组别,并以Xxx…Zzz…的字串输入后,按,选定的座标值将立刻被更新,供加工程式来叫用不同的座标系统.第一个画面是扩充偏移(00),G53工件座标系,次页才是G54,G55,G56,G57,G58,G59.01号G54原点的机械坐标值=01号的设定值+(00)号的设定值;02号G55原点的机械坐标值=02号的设定值+(00)号的设定值;依此类推,06号G59原点的机械坐标值=06号的设定值+(00)号的设定值.G54到G59都会受到(00)号设定值的影响.如输入X-256.5,按,会将-256.5设定到游标标定组的X座标值.2-23图 2.2.5–4 座标功能画面扩充偏移的设定会直接影响其他6个座标系.G54到G59是工件座标系,设定时要考虑的是工件座标,刀具和程式内容.如果要重设一个座标系:a. 利用游标键,移到要设定的座标系的号码上.b. 输入轴名称及新座标值,三轴可连写,记得要填小数点,以免混淆.(例:X100. Z200.)c. 按,将值输入控制器.自动座标截取设入机能当游标停在 G54~G59 时,本功能旨在将目前机械座标自动设入工作座标设定页,区分有【设X】【设Y】【设Z】【全设】等按钮项,功能说明如下:【设X】:将目前机台X的机械座标值,直接抄入(Teach in)游标停在的工作座标系上【设Y】:将Y轴的机械座标值直接抄入游标停在的工作座标系上【设Z】:将Z[轴的机械座标值直接抄入游标停在的工作座标系上【全设】:将目前机台的三轴机械座标值,直接抄入游标停在的工作座标系上2-242.2.6 诊断机能(DGNOS)按下键出现下五个主功能画面,分别为【警报】,【I/O】,【MLC2】,【资讯】,【升级】. 在诊断功能画面上可以得知人机介面的讯号及机器本身之状况,便於维修及系统测试.图 2.2.6–1 诊断机能主画面2.2.6.1 警报按下【警报】得画面如图2.2.6-2.图 2.2.6–2 警报功能画面按【警报】进入【警报】,【警告】,【讯息】,【历程】的子功能显示画面.当有任何警报或MLC方面的操作警示出现时,警报或讯息会出现在萤幕上.也就是说,操作者透过此键,以获得状况说明.在系统运作中发生了问题,就会产生警报讯息.使用者能藉此找出问题及对策.如果系统产生了警报,整个使用者操作进行会立刻停止,并将讯息表列在萤幕中.当问题处理完毕,必须按,才能将状况解除.当操作警示出显示在萤幕上时,压【讯息】键以便得到更仔细的讯息,如图2.2.6-3.警示2-25出现并不会中断加工的进行,而是提醒使用者某些情况的因应.操作警示是配合MLC LADDER的设计所决定的,例如,防护门没有关好,由LADDER的机能引出"DOOR NOT CLOSE",或是切削水循环故障而引出"COOLANT LOW"诸如此类.所以当警示出现,应检查机械及周边设备的状况.(本节适用工具机制造厂人员)警示讯息编辑是由工具机制造厂技术人员,配合MLC LADDER的设计,及机器操作的考量来编写的文字提示,不应被使用者随意更改,机器出厂时即向客户说明.这些讯息内容,应力求清楚简单.图 2.2.6–3 讯息功能画面2.2.6.2 IOCSA按下【I/O】得画面如下:图 2.2.6–4 IOCSA主画面此画面分为五大部份,而焦点的指定方式则是透过次功能键来指定,被指定之类别将显示於画面中左上方之栏位(以上图为例,按下之次功能键为【I点】,则该类别显示於左上方之栏位);而该类别之页数切换,则是透过,控制.2-262.2.6.3 MLC2按下【MLC2】主功能键画面如下,可看到【计数】,【RG.R】,【RG.D】,【计时】四个子功能键.图 2.2.6–5 MLC2主功能画面【MLC2】及【IOCSA】是用以查看I/O及系统内部状态的画面.共有I,O,C,S,A,计数器,计时器,暂存器,D暂存器.在维护修理机台,或寻找不正常原因的情况下会用到.图 2.2.6–6 I/O及系统内部状态如果需要更详细的说明,请查阅维护手册.操作面板 MLC (阶梯程式) CNC 系统TIMEROISCREGISTERCOUNTER2-272.2.6.4 资讯按下【资讯】得画面如下.(系统资讯是显示系统维护变数的画面,此功能提供给设计者及系统维护人员使用).图 2.2.6–7 资讯功能主画面【讯息】按下讯息键显示如下的画面.图 2.2.6–8 资讯\讯息画面此画面的编号所代表的意义列如下表:2-28表 2-1编号意义编号意义0 X轴伺服落后计数值 201 Y轴伺服落后计数值 212 Z轴伺服落后计数值 223 第4轴伺服落后计数值 234 等待MST完成标记 245 到达实际位置检查标记 256 实际主轴转速 267 主轴伺服落后计数值 278 主轴命令值 289 主轴定位中心(解码器)PLUSE 2910 主轴定位到达范围PLUSE 3011 3112 32 X轴机台实际座标值13 33 Y轴机台实际座标值14 34 Z轴机台实际座标值15 35 第4轴机台实际座标值16 X轴手轮命令计数值 36 主轴正转圈数之计次值17 Y轴手轮命令计数值 37 当前机台位置18 Z轴手轮命令计数值 38 中断触发计数器19 第四轴手轮命令计数值 39 主轴现在位置离索引点距离【诊断】:诊断的项目共有八项,这些项目主要是检查轴卡到I/O卡的传输线是否有接好,Jump的位置对不对等等,若视窗右边中的在诊断过后转变成×,代表此一项目有错误,可以在解决对策的讯息列中得到可能发生的错误,以检查并消去错误的产生.图 2.2.6–9 资讯\诊断画面视窗最上方的挡块状态表示原点挡块的状态,为1表示各轴目前的位置在原点挡块的位置. 2-29【统计】:按下统计会出现如下的视窗其图示的意义介绍如下:图 2.2.6–10 资讯\统计画面1. 切削时间:每当使用者按下了操作面板上的Cycle Star键,切削时间先重置(归零)然后开始计时,直到这个加工行程结束.2. 运转时间:运转时间是每次开机后切削时间的总和,直到关机后才被重置(归零).3. 加工部品数:当CNC系统每次读入M02或M30等程式结尾的M码时,系统会自动将加工品数逐次加上.功能键介绍:1.时间:此功能键是在清除加工运转时间.按下功能键后会显示讯息盒提示使用是否确定要清除运转时间.(如图2.6.6-11)图 2.2.6–11 清除运转时间2.件数:此功能键是在清除加工件数.按下功能键后会显示讯息盒提示使用是否确定要清除加工件数.(如图2.6.6-12)1232-30图 2.2.6–12 清除加工件数3.初始:设定加工件数的初始值.(如图2.2.6-13)图 2.2.6–13 初始件数设定4.最大:设定最大加工件数的值.当加工件数的值等於最大加工件数的值,可以依使用者的需要做不同的处理.(如图2.2.6-14)2-31图 2.2.6–14 设定最大加工件数2.2.6.5 升级此一功能只有在准备未了的状态下才能执行.先压下EMG-STOP后再压下【升级】按键,画面出现系统升级画面. 出现一个对话框如下,让使用者选择要进行的工作项目为何.各项功能列表如下:图 2.2.6–15 诊断\升级功能画面1. 系统升级:若要选择此项功能请先插入附有本公司最新版软体的软碟,然后按【确定】,将会出现安装画面,在安装过程中会有安装程式介绍,只要按照安装程式的介绍即可升级系统.2. 存盘实体诊查:会弹出对话盒(如图2.2.6-12),按下确定键后回到DOS模式下(如图2.2.6-13).让使用者选择要工作的磁碟为A或C,若使用者无输入值,则执行预设值C磁碟机.提供给使用者选择的工作项目有四类: (1).扫毒 (2).磁碟扫描 (3).磁碟重整 (4).离开系统图 2.2.6–16 存盘实体检查确认画面2-32图 2.2.6–17 存盘实体检查功能选项3. 参数备份:。
NQ宝元LNC520I系统简明操作
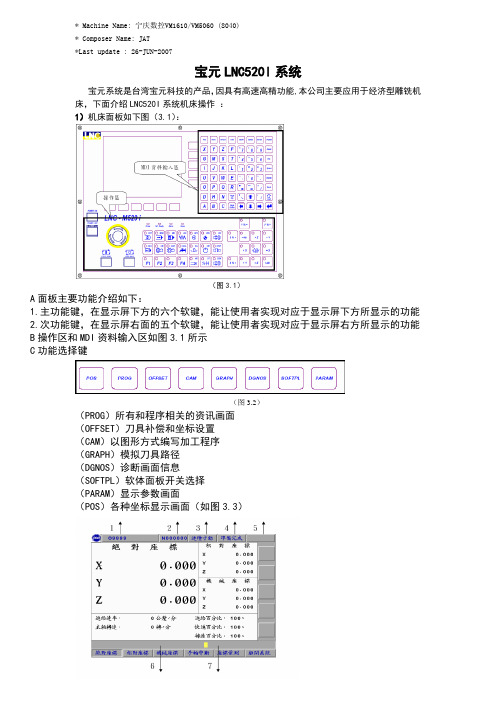
* Machine Name: 宁庆数控VM1610/VM5060 (8040)* Composer Name: JAT*Last update : 26-JUN-2007宝元LNC520I系统宝元系统是台湾宝元科技的产品,因具有高速高精功能,本公司主要应用于经济型雕铣机床,下面介绍LNC520I系统机床操作:1)机床面板如下图(3.1):(图3.1)A面板主要功能介绍如下:1.主功能键,在显示屏下方的六个软键,能让使用者实现对应于显示屏下方所显示的功能2.次功能键,在显示屏右面的五个软键,能让使用者实现对应于显示屏右方所显示的功能B操作区和MDI资料输入区如图3.1所示C功能选择键(图3.2)(PROG)所有和程序相关的资讯画面(OFFSET)刀具补偿和坐标设置(CAM)以图形方式编写加工程序(GRAPH)模拟刀具路径(DGNOS)诊断画面信息(SOFTPL)软体面板开关选择(PARAM)显示参数画面(POS)各种坐标显示画面(如图3.3)(图3.3)3)工作坐标系设置工件坐标系的零点偏置有四个,分别是G54、G55、G56、G57零点偏置的设置可通过操作软键OFFSET下的坐标系中的矩形中心/圆形中心/教导输入等分中对刀,测量计算。
4)设置通讯:(例XP)和拷贝程序1.设置电脑名称和工作组(系统和将联网的计算机同步)2.启用来宾帐户3.设置传输文件夹并共享(系统和将联网的计算机同步)4.按装并启用NETBUI协议5.设置自动IP地址通讯设置完毕后,就可以按(PROG)下的档案总管等按纽拷贝程序到系统中了。
5)一切准备完毕后数控启动键就可自动加工了在自动加工前请把进给率调低,以免发生意外自动加工中可用手轮执行加工程序,手轮上的X/Y和系统上的F2按纽控制。
如在操作过程中有报警出现,请在系统上按诊断软键查寻报警说明。
如还有疑问,请联系我们!南京宁庆数控机床制造有限公司售后服务部电话025-********传真025-********。
宝元系统用户参数说明

001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017
参数说明
程式编辑 开机寻原点优先 优先回原点轴 快速移动 50%
刀库刀数 强制轨道润滑 润滑NO 时间 润滑OFF 时间 加工件数警报 自动断电功能(M30 指令结束后) 断电延长时间 是否有第四轴4 轴回原点方向 刀库及刀臂维修功能
1
标准设定
1 1 1 0 24 0 12 25 0 0 5 0 1 0 0 0 0
018
主轴外部定位监测
0
019
安全门功能
0
020
夹刀延长时间
10
021
手动主轴定位延长时间
0
022
主轴定位完成延长监测时间
50
023
空压忽略
1
宝元数控精密股份有限公司 LNC Technology Co.,Ltd
Saturday, November 26, 2011
2
标准设定001程式编辑002开机寻原点优先003优先回原点轴004快速移动50005刀库刀数24006强制轨道润滑007润滑no时间12008润滑off时间25009加工件数警报010自动断电功能m30指令结束后011断电延长时间012是否有第四轴功能013x轴回原点方向014y轴回原点方向017刀库及刀臂维修功能018主轴外部定位监测019安全门功能020夹刀延长时间10021手动主轴定位延长时间022主轴定位完成延长监测时间50023空压忽略saturdaynovember262011宝元数控精密股份有限公司lnctechnologyco
宝元程式操作说明书 (2)
.1.1 程序的种类和构成1.2 程序段的构成1.3 单词的构成1.4 数值指令1.5 编号1.6 可选择程序段的程序跳过1.7 控制脱开接入功能1.1 程序的种类和构成程序分为主程序和子程序2种(1)主程序加工一个零件的程序。
在主程序中调取子程序,可提高制作程序的效率。
结束主程序用M02(或M30)。
主程序(2)子程序由主程序或其他子程序调取使用。
最后用M99结束子程序。
子程序1.2 程序段的构成程序由数个指令构成。
每一个指令称为程序段。
程序段由1个或数个单词构成。
每个程序段之间以程序段结束代码(EOB)分开。
(本书说明中,程序段结束代码以“;”表示。
)···;NO001G92×100 ;•···;M02 ;程序段程序段(注1)程序段结束代码在ISO码是[LF] OA(16位数)EIA码是[CR] 80(16位数)(注2)1个程序段的最多字数是128个字母。
1.3单词的构成单词由如下所示地址及几位数的数值构成。
(数值前可加+,-符号。
)X -1000地址数值单词(注1)地址由英文字母(A~Z)中的一个字母表示。
(注2)地址字母「O」除备注以外不使用。
1.4数值指令(1)小数点指令数值的指令方法有以下2种,由参数1设定。
指令方法1 (基本)指令方法2 (最小)(注)用户参数……参照操作说明书(2)地址的数值指令范围最大位数为9位。
指令中小于最小设定单位部分,自动削除。
1.5 编码指在各程序段的位置字母N后可加上编码(1~9999)。
利用编码可使用编码搜索及重新开始功能。
指令形式i )在N后接数字(0~9)表示。
i i )编码最多以4位数指定。
(注1)不要用NO。
(注2)编码写在程序段的前面。
NO 1 0 0 G 9 0 ×1 0 0 ;如在程序段的前面有可选择跳过程序段(’/’)指令的情况下,编码写在其前后都可以。
NO 1 0 0 /G 9 0 ×1 0 0 ;或者/NO 1 0 0 G 9 0 ×1 0 0 ;(注3)编码的顺序可任意定,不是连续的数字也可以。
AT528 AT528L 手持式交流低电阻测试仪 用户手册说明书
用户手册User’s GuideAT528/AT528L手持式交流低电阻测试仪Rev.B3固件说明:适用于主程序RevA1.6及以上的版本@Instruments常州安柏精密仪器有限公司.江苏省常州市钟楼区宝龙国际61-3层电话:*************传真:*************销售服务电子邮件: *****************技术支持电子邮件: ****************©2005-2016 Applent Instruments Ltd.2 AT528/AT528L 用户手册声明根据国际版权法,未经常州安柏精密仪器有限公司(Applent Instruments Ltd.)事先允许和书面同意,不得以任何形式复制本文内容。
安全信息为避免可能的电击和人身安全,请遵循以下指南进行操作。
免责声明用户在开始使用仪器前请仔细阅读以下安全信息,对于用户由于未遵守下列条款而造成的人身安全和财产损失,安柏仪器将不承担任何责任。
仪器接地为防止电击危险,请连接好电源地线。
不可在爆炸性气体环境使用仪器不可在易燃易爆气体、蒸汽或多灰尘的环境下使用仪器。
在此类环境使用任何电子设备,都是对人身安全的冒险。
不可打开仪器外壳非专业维护人员不可打开仪器外壳,以试图维修仪器。
仪器在关机后一段时间内仍存在未释放干净的电荷,这可能对人身造成电击危险。
不要超出本说明书指定的方式使用仪器超出范围,仪器所提供的保护措施将失效。
警告:不要加直流电压或电流到测试端,否则会损坏仪器。
警告:测试电容器前,确保电容器已放电,否则会损坏仪器。
安全标志:设备由双重绝缘或加强绝缘保护废弃电气和电子设备 (WEEE) 指令2002/96/EC切勿丢弃在垃圾桶内有限担保和责任范围 3有限担保和责任范围常州安柏精密仪器有限公司(以下简称Applent)保证您购买的每一台AT528/L在质量和计量上都是完全合格的。
此项保证不包括保险丝以及因疏忽、误用、污染、意外或非正常状况使用造成的损坏。
宝元操作说明新版
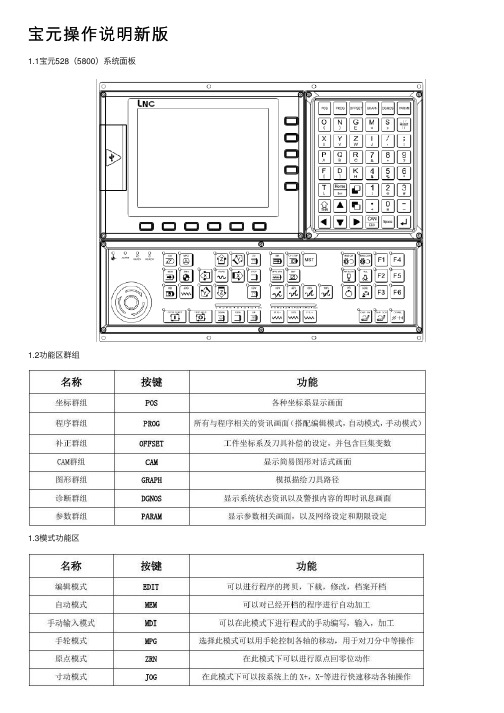
宝元操作说明新版1.1宝元528(5800)系统⾯板1.2功能区群组1.3模式功能区1.4按键区2宝元528(5800)系统操作使⽤2.1⼀般操作流程:1)开机---回机床原点---⼯件分中----对⼑-----拷贝加⼯程序----选择程序进⾏开档---切换到⾃动模式(⾃动模式)---⼿轮模拟(F2)-----启动(CYCLE START)2)回原点:ZRN---启动(CYCLE START)(直到⾯板上HOME指⽰类亮为⽌,表⽰回原点完成3)分中:补偿----座标系设定----矩形中⼼---设X1,X2,Y1,Y2,(为四⾯分中)对⼑:补偿---座标系设定----⼀般设定---设Z。
5)拷贝程序:编辑模式---PROG—档案总管---复制档案----选择E或Z盘----选择要加⼯的⽂件名----确定⽂件名----将加⼯⽂件进⾏开档。
2.2常⽤命令:1)移动⾄要加⼯⼯件的中⼼点(下例为:G54座标系来说明的)按下《⼿动输⼊》输⼊“G54G0X0Y0”--按下《登录》--按下《启动(CYCLE START)》2)输⼊主轴转速⼿动输⼊—输⼊“M3S10000”---登录----启动(CYCLE START);M3表⽰主轴正转,S10000表⽰转速值为每分钟10000转。
3)加⼯前座标偏移(机床重启后数值不变,应注意在加⼯另⼀⼯序时改为0)补偿---座标系设定----移动光标⾄0座标系----输⼊您想要偏移的轴及值---确定(按回车键)(例如:输⼊“Z10”,表⽰在G54座标系的基础上将Z轴抬⾼10MM。
)4)加⼯中偏移座标(⼿轮中断,机床重启后⾃动归0)按下程序暂停(FEED HOLD,灯亮)---F3(⼿轮中断)---按下座标---按下《⼿轮中断》----⽤⼿轮移动你想要偏移的轴和值。
注:A:未重新启动时,这偏移值仍然有效,在加⼯另⼀⼯序时应⽤⼿轮中断功能将该⼿轮移动值移动为零。
B:⼿轮中断有模式控制锁定的,在⾃动模式(⾃动模式)下的程序暂停的情形下,按下操作⾯板上的F3才能启动⼿轮中断功能(⼿轮插⼊功能)。
宝元_m520i_系统使用手册_简体中文版

2.4.1 絕對座標畫面..................................................................................................................25 2.4.2 相對座標畫面..................................................................................................................26 2.4.3 機械座標畫面..................................................................................................................27 2.4.4 座標量測.........................................................................................................................28 2.4.5 離開系統畫面..................................................................................................................29 2.5 程式機能(PROG)....................................................................................................................30 2.5.1 現行程式.........................................................................................................................31 2.5.2 背景程式.........................................................................................................................37 2.5.3 檔案總管.........................................................................................................................38 2.5.4 程式核對.........................................................................................................................44 2.5.5 手動輸入.........................................................................................................................45 2.5.6 通訊連線(RS232).......................................................................................................46 2.5.7 DNC 直接傳輸加工功能.................................................................................................50 2.6 補正機能(OFFSET) ................................................................................................................51 2.6.1 刀具補正.........................................................................................................................51 2.6.2 巨集變數.........................................................................................................................52 2.6.3 座標系設定 .....................................................................................................................53 2.7 銑床 EASY-CAM .........................................................................................................................55 2.7.1 前言 ................................................................................................................................55
宝元系统 调机简易说明 车床

新机调机简易说明一:通电(1):通电前确认事项1:所有焊接信号线需正向测量一边,反向测量一边确认信号线接线正确无误2:确认输入总电源电压为为380V(2):通电1:将所有电箱内通电开关关闭2:测量电箱内开关输入及输出(三相AC220V,三相AC380V,AC24V,DC24V)无短路,确认主电路接线无误。
3:将主机后背DC24V输入插头拔除,安川输入三相电源插头拔除,安川开关电源插头拔除。
4:主轴伺服及变频器通电,先送确认变频器电源开关,测量输入端三相电压为AC380V,无缺相后,打开开关确认变频器正常后。
5:安川伺服通电,先确认伺服驱动器电源开关输入端电压为AC220V,无缺相,打开电源开关,测量安川伺服主电源端子三相电压为AC220V,无缺相,再确认安川开关电源电压二相为AC220V。
三轴伺服相同测试方法,确认后断电插入安川电源主电路及开关电源输入端子,通电测试伺服是否正常。
6:系统电源通电:先确认系统电源开关输入电压为二相AC220V,打开电源开关,确认主轴电源输入电压为AC220V,用万用表DC5V,DC12V输出电压正确,再确认到主机DC24V电源端子直流电压是否为DC24V,正负是否正确(可查看主机后背DC24V母座标示)。
以上确认正确后可进行下部操作二:参数汇入功能1:联网上传资料新机过来请将系统参数651号设为1,并关机重启,开机后设定机台IPPARAM→网络设定→设定IP如下范例控制器端IP 172.17.90.9子网屏蔽255.255.255.0预设网关172.17.90.1计算机端IP 172.17.90.10子网屏蔽255.255.255.0预设网关172.17.90.1设定IP后系统关机重启,开启计算机端ReCON – Maintenance联网软件,机台联线设定控制器的IP172.17.90.9,单击联机。
控制器端会出现联机授权画面。
授权后→机台参数→设定参数所在路径→控制器端压下急停→选择要上传的项目→单击上传。
(完整版)宝元LNC-M528A系统参数

用户参数参数功能说明001程式编辑D051 0可编辑 1保护002开机寻原点优先D052 0否 1是003优先回原点轴D053 0同时 1 Z轴004快速移动50%D054 0否 1是005刀库总刀数D055=刀塔总刀数(0-50)006强制导轨润滑D056 0自动 1手动007润滑ON时间D056 0自动 1手动008润滑OFF时间D058 单位分009加工件数报警D059 0不执行 1执行010自动断电功能D060 0不执行 1执行011断电延迟时间D061 秒 0-32767012润滑油机无油报警信号D062013主机冷冻机运行选择D063 0不运行 1运行014主轴异常信号选择D064 0常开 1常闭015主轴速度检查选择D065 0时间 1信号 2编码器016主轴正转速度到达时间D066 单位0.1秒 0-32678 017主轴反转速度到达时间D067 单位0.1秒 0-32678 018主轴停止到达时间D068 单位0.1秒 0-32678 019刀库功能选择D069 0无 1开启020安全门D070 0否 1是021刀库故障排除,解除Z轴销定D081 0正常 1解除022刀库调试功能,空刀运行D082 0装刀运行 1空刀运行023轴向限位功能选择D083 0硬体限位 1PLC限位024第4轴功能D084 0关闭 1开启0255轴功能D085 0关闭 1开启0266轴功能D086 0关闭 1开启027X轴回原点功能D087 0正向 1反向028Y轴回原点功能D088 0正向 1反向029Z轴回原点功能D089 0正向 1反向030第4轴回原点功能D090 0正向 1反向0315轴回原点功能D091 0正向 1反向0326轴回原点功能D092 0正向 1反向033主轴限位开关选择D093 0常开 1常闭034O22输出功能选择D094 0吹气 1气封035刀库马达直流制动时间D095 单位0.01秒 0-3267 036N/A N/A037N/A N/A038N/A N/A039N/A N/A040N/A N/A系统参数-伺服参数说明常见数值R0408G05_R预设等级R1004切削最高速度 um/min5000000 R1800X轴 切削最高速度 um/min5000000 R1801Y轴 切削最高速度 um/min5000000 R1802Z轴 切削最高速度 um/min10000000 R1803X轴 切削最高速度 um/min2000000 R0806切削转角允许误差 um50 R1986X轴旋转参考半径um(0:N/A)0 R1987Y轴旋转参考半径um(0:N/A)R1988Z轴旋转参考半径um(0:N/A)R1989第4轴旋转参考半径um(0:N/A)R0400切削直线加速时间msR0401[R1]切削钟型加减速时间msR0402[R1]切削平滑加减速时间msR0403[R1]切削后加减速时间msR0404[R1]圆弧箝制速度um/minR0405[R1]圆弧箝制最小速度um/minR0429转角方式 0一般 1速度差 2参考R0430[R1]转角参考速度um/minR0410[R1]X转角速度差um/minR0411[R1]Y转角速度差um/minR0412[R1]Z转角速度差um/minR0413[R1]4转角速度差um/minR0407启动前馈功能R0422X轴位置回路增益1/sR0423Y轴位置回路增益1/sR0424Z轴位置回路增益1/sR0425第4轴位置回路增益1/sR0431[R1]X轴速度前馈(%)R0432[R1]Y轴速度前馈(%)R0433[R1]Z轴速度前馈(%)R0434[R1]第4轴速度前馈(%)R0437X轴前馈加减速时间(ms)R0438Y轴前馈加减速时间(ms)R0439Z轴前馈加减速时间(ms)R0440第4轴前馈加减速时间(ms)R0700[R10]切削直线加减速时间msR0701[R10]切削钟型加减速时间msR0702[R10]切削平滑加减速时间msR0703[R10]切削后加减速时间msR0704[R10]圆弧箝制速度um/minR0705[R10]圆弧箝制最小速度um/minR0710[R10]X轴转角速度差um/minR0711[R10]Y轴转角速度差um/minR0712[R10]Z轴转角速度差um/minR0713[R10]第4轴转角速度差um/min R0730[R10]转角速度参考um/minR0731[R10]X轴速度前馈(%)R0732[R10]Y轴速度前馈(%)R0733[R10]Z轴速度前馈(%)R0734[R10]第4轴速度前馈(%)R1940AIC-II切削直线加减速时间msR1941AIC-II切削钟型加减速时间msR1942AIC-II切削平滑加减速时间msR1943AIC-II切削后加减速时间msR1944AIC-II圆弧箝制速度um/minR1945AIC-II圆弧箝制最小速度um/min R1946AIC-II转角参考速度um/minR0416X轴静止时伺服落后检查umR0417Y轴静止时伺服落后检查umR0418Z轴静止时伺服落后检查umR0419第4轴静止时伺服落后检查umR0409CAM断差修正量(um) 0:关闭R0406SHINING MODER0001V cmd控制位置回路增益1/sR0002X轴 最大伺服落后 umR0003Y轴 最大伺服落后 umR0004Z轴 最大伺服落后 umR0005第4轴 最大伺服落后 umR0010X轴G00加减速时间msR0011Y轴G00加减速时间msR0012Z轴G00加减速时间msR0013第4轴G00加减速时间msR0024X轴所对应其伺服轴之号码R0024Y轴所对应其伺服轴之号码R0024Z轴所对应其伺服轴之号码R0024第4轴所对应其伺服轴之号码R0040G00最低overide在F0之百分比值R1112X轴马达encoder一转的pulse数R1113Y轴马达encoder一转的pulse数R1114Z轴马达encoder一转的pulse数R1115第4轴马达encoder一转的pulse数R0054设定X轴回授倍率因数 1/2/4R0055设定Y轴回授倍率因数 1/2/4R0056设定Z轴回授倍率因数 1/2/4R0057设定第4轴回授倍率因数 1/2/4R0845设定X轴为 0线性 1旋转R0846设定Y轴为 0线性 1旋转R0847设定Z轴为 0线性 1旋转R0066设定第第4轴为 0线性 1旋转R0065使用绝对值式编码器BITR0108设定X轴马达增益值RPM/1VR0109设定Y轴马达增益值RPM/1VR0110设定Z轴马达增益值RPM/1VR0111设定第4轴马达增益值RPM/1VR0116伺服轴输出命令反相BITR0185伺服轴回授信号反相BITR0156X轴命令格式0:AB 1:CW 2:PD 3:V R0157Y轴命令格式0:AB 1:CW 2:PD 3:V R0158Z轴命令格式0:AB 1:CW 2:PD 3:V R0159第4轴命令格式0:AB 1:CW 2:PD 3:V R0191X轴Encoder讯号格式R0192Y轴Encoder讯号格式R0193Z轴Encoder讯号格式R0194第4轴Encoder讯号格式R0800X轴G00位置检查视窗范围umR0801Y轴G00位置检查视窗范围umR0802Z轴G00位置检查视窗范围umR0803第4轴G00位置检查视窗范围um。
宝元接对刀仪说明

宝元接对刀仪根据用户的反馈,特别编辑了对刀仪接宝元系统的说明一:硬件准备与识别1:对刀仪一个。
(通常用常闭的,不过宝元系统改常开常闭比较方便,如果实在没常闭的常开也一样使用。
)2:弄清楚对刀仪每根线的定义。
(一般由这几个定义组成:对刀信号,过行程保护信号,对刀信号输入端,过行程保护信号输入端,24V,0V)3:找到宝元系统对刀信号输入端口,宝元系统对于对刀仪端口是专用的端口。
这点比新代系统做的好一点。
一般在显示屏背面,一个标有SH1或(L-IN1)的接线端口。
如下图:4:找到上图报警接口OT1和OT2,把上面的跳线卸掉。
然后这两个接口分别接对刀仪过行程保护的两条线即可。
(这是在机床没有写对刀过行程保护PLC接口时的最简单有效的接法。
)5:以上四点都完成了,开始对刀仪信号线与宝元系统连接。
如下图:二:以上硬件准备就绪后接下来是参数设置和对刀程序的设置了。
1:对刀命令的设置如下图:上图是设定对刀变数的G码和M码。
一般G码为36,M码为06.2:设定对刀信号的常开或常闭极性,如下图:上图是对刀信号点的常开和常闭设定,NC表示常闭,NO表示常开。
3:设定对刀信号输入点的接口,是1口还是2口。
如下图:上图是接口设定窗口。
宝元对刀信号口提供了两个,可以任意选择1或者2接口。
4:对刀宏程序的导入和编辑。
上图为对刀宏程序显示窗口,宝元一般为O9004和O9010两个。
一个设定落差用,一个对刀用。
在宏程序里面可以修改对刀速度,对刀次数,对刀吹气的时间。
一般更换对刀仪不需要宏程序,如果是新装对刀仪就需要宏程序。
如果需要可以加我个人微信号(szzww314)获取下载地址。
5:开启是否使用对刀仪功能,如下图:上图是开启对刀仪是否使用的功能和对刀报警功能。
三:以上为宝元系统安装对刀仪到参数设定的全部图文内容,如果感觉还是不是很详细。
可以关注我们的微信公众号:qq28336389(国雕数控维修)。
里面有更多详细的内容可分享朋友圈。
宝元系统基本操作

三测量刀长:
1)MDI(手动输入模式)→PROG→输入M06T1→登录→按启动
2)如果是多把刀连在一起加工的程式,则可以在刀具(D)前面加M06Tn(n数值不能为0或同一个数值而且Tn与相邻Hn的n数值要一致)
四打开加工程式:
1)EDIT(程式编辑模式)→PROG→档案总管→选择需要加工的程式文件名→按回车键(确定)
4)CAM:程式群组(用作图形辅助编辑加工,现不用)
5)DGNOS:诊断功能及机械即时信息
6)SOFTPL:软件面板开关选择(一般不用)
7)PARAM:参数群组(包含所有的参数,如用户参数里的润滑泵开启与关闭的时间设定
8)MPG:手轮模式
9)CYCLESTART:程式启动按钮
10)FEEDHOLD:程式停止
五启动加工:
1)MEM(自动模式)→按启动键→执行加工
六接点
1)MEM→PROG→程式再启→输入断点序号→按回车键→重启搜寻→启动加工
七按键的功能定义:
1)POS:坐标群组
2)PROG:程式群组(所有与程式有关的文件都在此群组内,包括程式档案手动输入程式等
3)0FFSET:补正群组(包括G54G55…分中教导输入坐标等)
11)CAN:删除键
12)Space:空格键八本地网络设置:宝元系 Nhomakorabea基本操作
一设定加工坐标系:
1)OFFSET→坐标系→选择(G54G55…Gnn)→1选择分中功能或教导输入或手动输入(数值前面要加X或Y或Z)
二求落差:
1)把刀尖移动到Z轴加工坐标点(一般是定在夹具表面)→MDI→PROG→输入G36→按复位键(RESET)→登录→按两下启动键(CYCLISTARET)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用户参数
参数功能说明001程式编辑D051 0可编辑 1保护
002开机寻原点优先D052 0否 1是
003优先回原点轴D053 0同时 1 Z轴
004快速移动50%D054 0否 1是
005刀库总刀数D055=刀塔总刀数(0-50)006强制导轨润滑D056 0自动 1手动
007润滑ON时间D056 0自动 1手动
008润滑OFF时间D058 单位分
009加工件数报警D059 0不执行 1执行
010自动断电功能D060 0不执行 1执行
011断电延迟时间D061 秒 0-32767
012润滑油机无油报警信号D062
013主机冷冻机运行选择D063 0不运行 1运行
014主轴异常信号选择D064 0常开 1常闭
015主轴速度检查选择D065 0时间 1信号 2编码器016主轴正转速度到达时间D066 单位0.1秒 0-32678 017主轴反转速度到达时间D067 单位0.1秒 0-32678 018主轴停止到达时间D068 单位0.1秒 0-32678 019刀库功能选择D069 0无 1开启
020安全门D070 0否 1是
021刀库故障排除,解除Z轴销定D081 0正常 1解除
022刀库调试功能,空刀运行D082 0装刀运行 1空刀运行023轴向限位功能选择D083 0硬体限位 1PLC限位024第4轴功能D084 0关闭 1开启
0255轴功能D085 0关闭 1开启
0266轴功能D086 0关闭 1开启
027X轴回原点功能D087 0正向 1反向
028Y轴回原点功能D088 0正向 1反向
029Z轴回原点功能D089 0正向 1反向
030第4轴回原点功能D090 0正向 1反向
0315轴回原点功能D091 0正向 1反向
0326轴回原点功能D092 0正向 1反向
033主轴限位开关选择D093 0常开 1常闭
034O22输出功能选择D094 0吹气 1气封
035刀库马达直流制动时间D095 单位0.01秒 0-3267 036N/A N/A
037N/A N/A
038N/A N/A
039N/A N/A
040N/A N/A
系统参数-伺服
参数说明常见数值
R0408G05_R预设等级
R1004切削最高速度 um/min5000000 R1800X轴 切削最高速度 um/min5000000 R1801Y轴 切削最高速度 um/min5000000 R1802Z轴 切削最高速度 um/min10000000 R1803X轴 切削最高速度 um/min2000000 R0806切削转角允许误差 um50 R1986X轴旋转参考半径um(0:N/A)0 R1987Y轴旋转参考半径um(0:N/A)
R1988Z轴旋转参考半径um(0:N/A)
R1989第4轴旋转参考半径um(0:N/A)
R0400切削直线加速时间ms
R0401[R1]切削钟型加减速时间ms
R0402[R1]切削平滑加减速时间ms
R0403[R1]切削后加减速时间ms
R0404[R1]圆弧箝制速度um/min
R0405[R1]圆弧箝制最小速度um/min
R0429转角方式 0一般 1速度差 2参考
R0430[R1]转角参考速度um/min
R0410[R1]X转角速度差um/min
R0411[R1]Y转角速度差um/min
R0412[R1]Z转角速度差um/min
R0413[R1]4转角速度差um/min
R0407启动前馈功能
R0422X轴位置回路增益1/s
R0423Y轴位置回路增益1/s
R0424Z轴位置回路增益1/s
R0425第4轴位置回路增益1/s
R0431[R1]X轴速度前馈(%)
R0432[R1]Y轴速度前馈(%)
R0433[R1]Z轴速度前馈(%)
R0434[R1]第4轴速度前馈(%)
R0437X轴前馈加减速时间(ms)
R0438Y轴前馈加减速时间(ms)
R0439Z轴前馈加减速时间(ms)
R0440第4轴前馈加减速时间(ms)
R0700[R10]切削直线加减速时间ms
R0701[R10]切削钟型加减速时间ms
R0702[R10]切削平滑加减速时间ms
R0703[R10]切削后加减速时间ms
R0704[R10]圆弧箝制速度um/min
R0705[R10]圆弧箝制最小速度um/min
R0710[R10]X轴转角速度差um/min
R0711[R10]Y轴转角速度差um/min
R0712[R10]Z轴转角速度差um/min
R0713[R10]第4轴转角速度差um/min R0730[R10]转角速度参考um/min
R0731[R10]X轴速度前馈(%)
R0732[R10]Y轴速度前馈(%)
R0733[R10]Z轴速度前馈(%)
R0734[R10]第4轴速度前馈(%)
R1940AIC-II切削直线加减速时间ms
R1941AIC-II切削钟型加减速时间ms
R1942AIC-II切削平滑加减速时间ms
R1943AIC-II切削后加减速时间ms
R1944AIC-II圆弧箝制速度um/min
R1945AIC-II圆弧箝制最小速度um/min R1946AIC-II转角参考速度um/min
R0416X轴静止时伺服落后检查um
R0417Y轴静止时伺服落后检查um
R0418Z轴静止时伺服落后检查um
R0419第4轴静止时伺服落后检查um
R0409CAM断差修正量(um) 0:关闭
R0406SHINING MODE
R0001V cmd控制位置回路增益1/s
R0002X轴 最大伺服落后 um
R0003Y轴 最大伺服落后 um
R0004Z轴 最大伺服落后 um
R0005第4轴 最大伺服落后 um
R0010X轴G00加减速时间ms
R0011Y轴G00加减速时间ms
R0012Z轴G00加减速时间ms
R0013第4轴G00加减速时间ms
R0024X轴所对应其伺服轴之号码
R0024Y轴所对应其伺服轴之号码
R0024Z轴所对应其伺服轴之号码
R0024第4轴所对应其伺服轴之号码
R0040G00最低overide在F0之百分比值R1112X轴马达encoder一转的pulse数R1113Y轴马达encoder一转的pulse数R1114Z轴马达encoder一转的pulse数R1115第4轴马达encoder一转的pulse数R0054设定X轴回授倍率因数 1/2/4
R0055设定Y轴回授倍率因数 1/2/4
R0056设定Z轴回授倍率因数 1/2/4
R0057设定第4轴回授倍率因数 1/2/4
R0845设定X轴为 0线性 1旋转
R0846设定Y轴为 0线性 1旋转
R0847设定Z轴为 0线性 1旋转
R0066设定第第4轴为 0线性 1旋转
R0065使用绝对值式编码器BIT
R0108设定X轴马达增益值RPM/1V
R0109设定Y轴马达增益值RPM/1V
R0110设定Z轴马达增益值RPM/1V
R0111设定第4轴马达增益值RPM/1V
R0116伺服轴输出命令反相BIT
R0185伺服轴回授信号反相BIT
R0156X轴命令格式0:AB 1:CW 2:PD 3:V R0157Y轴命令格式0:AB 1:CW 2:PD 3:V R0158Z轴命令格式0:AB 1:CW 2:PD 3:V R0159第4轴命令格式0:AB 1:CW 2:PD 3:V R0191X轴Encoder讯号格式
R0192Y轴Encoder讯号格式
R0193Z轴Encoder讯号格式
R0194第4轴Encoder讯号格式
R0800X轴G00位置检查视窗范围um
R0801Y轴G00位置检查视窗范围um
R0802Z轴G00位置检查视窗范围um
R0803第4轴G00位置检查视窗范围um。