第四章 MATLAB与交直流调速系统仿真
基于MATLAB的直流调压调速控制系统的仿真
三、MATLAB仿真环境搭建
MATLAB提供了Simulink仿真工具,可以方便地进行控制系统的建模和仿真。在搭建直流调压调速控制系统的仿真环境时,首先需要对电机的特性进行建模,包括电机的电动力学方程、电机的转矩-转速特性曲线等。然后,设计控制器的结构和参数,通过Simulink建立相应的控制模型,最后进行仿真验证。MATLAB还提供了丰富的工具箱和函数库,如控制系统工具箱、电机控制工具箱等,能够方便地进行控制系统设计和分析。
2. 控制系统模型
在直流调压调速控制系统中,控制器起着至关重要的作用。常见的控制器包括PID控制器和模糊控制器。这些控制器可以根据电动机的工作状态和需求信号进行控制,实现对电动机速度和输出电压的精准控制。在进行仿真时,需要将控制器的数学模型结合到整个系统中,以实现对电动机的系统级控制。
在MATLAB中进行直流调压调速控制系统的仿真时,可以利用Simulink工具箱进行建模和仿真。Simulink是MATLAB的一个附加工具箱,提供了丰富的模块和功能,可以方便地对控制系统进行仿真和分析。以下是基于MATLAB的直流调压调速控制系统的仿真步骤:
五、实验结果与分析
通过MATLAB的仿真实验,我们可以得到直流调压调速控制系统的性能指标,如电机的转速曲线、电机的输出功率曲线等。根据仿真结果,我们可以对控制系统进行性能分析和优化,调整控制器的参数,改进控制策略,提高系统的稳定性和响应性能。通过仿真实验可以验证控制系统的设计是否满足实际要求,指导工程实践中的系统调试和优化。
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
第四章 MATLAB与交直流调速系统仿真

根据是否把系统输出信号进行反馈并参与控制而将自动控制系 统又分为开环控制系统和闭环控制系统。
第4章 MATLAB与交直流调速系统仿真
4.1.2控制系统的技术指标与要求
控制系统的技术指标通常分为静态指标和动态指标两大类。
1、静态指标 ⑴调速范围 生产机械要求电动机在额定负载时提供的最高转速 nmax与最低转速nmin之 比叫做调速范围,表示为: D n max / n min
第4章 MATLAB与交直流调速系统仿真
直流电动机I的状态空间表达式为:
x1 40 x 2 0 . 00144
y 0 x1 1 x2
92 . 5 x 1 500 0 x2 0
第4章 MATLAB与交直流调速系统仿真
查看此模型方法是通过选择电机模型,在右键弹出式菜单中,点击Look under mask,即可实现。
第4章 MATLAB与交直流调速系统仿真
4.3 直流调速系统与MATLAB 仿真实现
4.3.1直流调速系统控制方案
根据电动机的转速表达式:
n
u d id R d Ce
第4章 MATLAB与交直流调速系统仿真
MATLAB与交直流调速系统仿真
第4章 MATLAB与交直流调速系统仿真
4.1控制系统及控制技术指标与要求
4.1.1 自动控制和自动控制系统介绍
自动控制是指在无人直接参与的情况下,利用控制装置使被控对 象,如机器设备、生产过程中的速度、温度、压力等物理量自动 的按照预定规律运行或变化的处理过程。并将这种能对被控制对 象的工作状态进行自动控制的系统称为自动控制系统。
输出方程
0 . 185 1 3 x 1 3 2 10 u 2 10 x 2 0 0
直流调速系统的MATLAB仿真(参考程序)

直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
MU d+I dGTU cE +--UCR图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速控制系统是工业自动化领域中常见的一种控制系统,它可以实现对直流电机的电压和速度进行精确的控制。
本文基于MATLAB软件对直流调压调速控制系统进行了仿真,主要包括建立电路模型、设计控制器、进行系统仿真等步骤。
通过仿真分析,可以验证控制系统的性能和稳定性,为实际工程应用提供参考。
一、直流电机数学模型直流电机是直流调压调速控制系统的执行元件,其数学模型可以基于电路和机械原理进行建模。
直流电机的数学模型主要包括电动势方程和机械方程,可以用下面的公式表示:1)电动势方程:\[E_a = K_e \omega\]\(E_a\)是电机的电动势,\(K_e\)是电机的电机常数,\(\omega\)是电机的角速度。
综合考虑电动势方程和机械方程,可以得到直流电机的传递函数:\[G(s) = \frac{k}{(s+a)(s+b)}\]\(k\)是传递函数的增益,\(a\)和\(b\)是传递函数的两个极点。
二、控制器设计在直流调压调速控制系统中,通常采用PID控制器来实现对电压和速度的精确控制。
PID控制器的传递函数可以表示为:\[C(s) = K_p + K_i \frac{1}{s} + K_d s\]\(K_p\)、\(K_i\)和\(K_d\)分别是比例环节、积分环节和微分环节的增益。
为了实现对电压和速度的精确控制,可以设计两个PID控制器,分别用于电压环和速度环。
电压环的PID控制器可以根据电机的电动势方程进行设计,速度环的PID控制器可以根据电机的机械方程进行设计。
三、系统仿真基于MATLAB软件,可以建立直流调压调速控制系统的仿真模型,对系统进行模拟和分析。
需要建立直流电机的数学模型,包括电动势方程和机械方程,并将其转化为传递函数形式。
然后,设计电压环和速度环的PID控制器,确定各个环节的增益参数。
将电机模型和控制器模型进行组合,得到整个系统的开环传递函数。
直流调速系统的MATLAB仿真
直流调速系统的MATLAB仿真直流调速系统是一种常见的电动机调速系统,其通过控制电枢电流或者换向电压,实现对电机转速的控制。
MATLAB是一款功能强大的工程软件,可以进行系统的建模仿真和控制算法的开发,因此可以用来进行直流调速系统的MATLAB仿真。
首先,我们需要对直流调速系统进行建模。
直流调速系统的主要组成部分包括电机、电流控制器和运动控制器。
电机是系统的执行器,电流控制器用来控制电机的电流,根据控制电机速度的需求调节电机的电压和电流。
运动控制器用来计算输出控制电压,控制电机的转速。
在MATLAB中,可以使用Simulink工具箱进行系统的建模。
Simulink提供了丰富的电气元件库和控制元件库,方便用户进行系统的搭建。
首先,我们需要在Simulink中搭建直流电机模型,可以使用电感、电阻和后验电动势等元件来描述电机的特性。
然后,可以添加电流控制器和运动控制器,分别用来控制电机的电流和速度。
在仿真过程中,我们可以通过输入电压的变化来模拟用户对电机速度的调节。
可以使用阶跃输入信号来模拟用户的控制输入。
然后,通过对系统进行仿真,观察输出转速的变化,并根据需要对控制算法进行调节。
可以使用MATLAB的绘图工具对输出转速进行可视化,也可以记录仿真过程中的各种参数,方便后续的分析和处理。
当然,在进行直流调速系统的MATLAB仿真时,还可以加入一些其他的因素,如电机负载变化、电机参数变化等。
这些因素会对系统的动态性能和稳态精度产生影响,因此需要在仿真过程中对其进行考虑。
总之,直流调速系统的MATLAB仿真可以帮助我们进行系统的设计和优化。
通过对系统的建模和仿真,以及对仿真结果的分析,可以帮助我们更好地理解和掌握直流调速系统的原理和特性,并且为系统的实际应用提供指导和支持。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速控制系统是一种常见的工业控制系统,广泛用于电力系统、电机驱动系统等领域。
MATLAB是一种功能强大的数学软件,可以用于建立系统的数学模型,进行仿真和控制算法的设计。
在直流调压调速控制系统中,主要包括两个部分:调压环节和调速环节。
调压环节用于控制直流电压的大小,而调速环节则用于控制直流电机的转速。
需要建立直流调压调速系统的数学模型。
以调压环节为例,可以根据直流调压系统的电路特性,建立其数学模型。
假设直流调压调速系统的输入电压为Vin,输出电压为Vout,输入电流为Iin,输出电流为Iout,则可以得到以下数学模型:Vout = K1 * Vin - K2 * IoutK1和K2分别为系统的增益参数。
接下来,需要设计调压环节的控制算法。
常见的控制算法包括比例控制、积分控制和PID控制。
假设调压环节的控制信号为U,设定电压为Vref,则可以得到以下控制算法:U = Kp * (Vref - Vout) + Ki * ∫(Vref - Vout)dt + Kd * d(Vref - Vout)/dtKp、Ki和Kd分别为比例、积分和微分参数。
然后,可以使用MATLAB进行系统仿真。
需要在MATLAB中定义系统的参数和控制算法。
然后,可以使用SIMULINK工具箱来建立系统的模型,连接各个模块,并设置输入电压和负载。
可以运行模型,观察系统的输出结果,评估系统的性能。
在仿真过程中,可以根据不同的需求和控制策略,调整系统的参数和控制算法,进行参数优化和性能改进。
基于MATLAB的直流调压调速控制系统的仿真可以帮助工程师和研究人员进行系统设计和性能评估,提高系统的稳定性和可靠性。
通过仿真还可以节省成本和时间,快速验证和优化控制算法。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真一、直流调压调速控制系统的基本原理直流调压调速控制系统通常由电源模块、调速器、电流反馈回路、转速反馈回路以及电机等组成。
其基本工作原理是通过电源模块提供不同的电压和电流输入,调速器根据控制信号对电源模块进行控制,实现对电机的调速和调压。
电流反馈回路和转速反馈回路则可以实时监测电机的电流和转速,并将监测到的信号反馈给调速器,以实现闭环控制。
在实际应用中,一般会根据具体的需求,设计不同的调速、调压算法和控制策略,以实现系统的高性能和稳定性。
1. 模型建立我们需要建立直流调压调速控制系统的MATLAB仿真模型。
在Simulink中,我们可以按照实际系统的组成,分别建立电源模块、调速器、电流反馈回路、转速反馈回路和电机等部分的仿真模型。
在建立模型的过程中,我们需要考虑各个部分之间的耦合关系、传递函数以及控制算法和策略等因素,以建立一个真实可靠的仿真模型。
2. 参数设置在建立模型之后,我们需要对各个部分的参数进行设置。
这些参数包括电源模块的输出电压和电流、调速器的控制信号、电流反馈回路和转速反馈回路的传感器参数、电机的参数等。
在设置参数的过程中,我们需要根据实际系统的要求,进行合理的选择和调整,以保证仿真的准确性和有效性。
3. 仿真验证完成模型建立和参数设置之后,我们可以进行仿真验证。
在仿真过程中,我们可以输入不同的电压和电流信号,观察系统的输出电流和转速,并通过对比实际数据,验证仿真模型的准确性和有效性。
我们还可以对系统的性能和稳定性进行评估和优化,以提高系统的控制精度和响应速度。
4. 控制策略优化在仿真验证的基础上,我们还可以对系统的控制策略进行优化。
通过改变调速算法、调压策略和闭环控制方法等参数,在仿真环境中对系统的性能和稳定性进行评估和对比,以达到系统优化的目的。
结论通过MATLAB的Simulink工具,我们可以方便地建立直流调压调速控制系统的仿真模型,并对系统的性能和稳定性进行评估和优化。
直流调速系统的matlab仿真
一,转速反馈控制直流调速系统的matlab仿真1,基本原理:根据自动控制原理,将系统的被调节量作为反馈量引入系统,与给定量进行比较,用比较后的偏差值对系统进行控制,可以有效地抑制甚至消除扰动的影响,而维持被调节量很少变化或不变,这就是反馈控制的基本作用。
在负反馈基础上的“检查误差,用以纠正误差”这一原理组成的系统,其输出量反馈的传递途径构成一个闭环回路,因此被称作闭环控制系统。
在直流系统中,被调节量是转速,所构成的是转速反馈控制的直流调速系统。
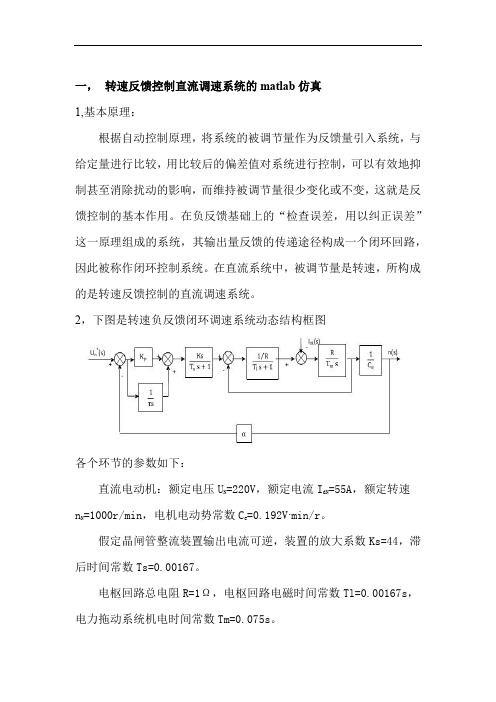
2,下图是转速负反馈闭环调速系统动态结构框图各个环节的参数如下:直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电机电动势常数C e=0.192V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后时间常数Ts=0.00167。
电枢回路总电阻R=1Ω,电枢回路电磁时间常数Tl=0.00167s,电力拖动系统机电时间常数Tm=0.075s。
转速反馈系数α=0.01 V·min/r。
对应的额定电压U n*=10V。
在matlab的simulink里面的仿真框图如下其中PI调节器的值暂定为Kp=0.56,1/τ=11.43。
3,仿真模型的建立:进入matlab,单击命令窗口工具栏的simulink图标,打开simulink模块浏览器窗口,如下图所示:打开模型编辑器窗口,双击所需子模块库的图标,则可以打开它,用鼠标左键选中所需的子模块,拖入模型编辑窗口。
要改变模块的参数双击模块图案即可(各模块的参数图案)。
加法器模块对话框Gain模块对话框把各个模块连接起来并按照上面给定的电机参数修改各个模块相应的参数,可以得到如下的比例积分的无静差直流调速系统的仿真框图:4,仿真后的结果及其分析:其中输出scope1中可以看出超调和上升时间等。
改变PI调节器的参数,并在仿真的曲线中得到最大的超调级调整时间,相互间进行比较,如下表所示:参照以上表格中的数据分析可知,改变PI调节器的参数,可以得到快速响应的超调量不一样,调节时间不一样的响应曲线。
MATLAB与交直流调速系统仿真

• Matlab软件介绍 • 交直流调速系统概述 • 交直流调速系统的仿真模型 • Matlab在交直流调速系统仿真中的
应用 • Matlab仿真的优化与改进
01
Matlab软件介绍
Matlab的特点与优势
强大的数学计算能力
Matlab提供了丰富的数学函数库,支持各种复杂的数学计算,包括 矩阵运算、统计分析等。
控制系统分析与设计
Matlab提供了多种控制系统分析和设计的 方法,如根轨迹法、频率响应法、状态空间 法等。
02
交直流调速系统概述
交直流调速系统的定义与分类
交直流调速系统的定义
交直流调速系统是指通过调节交流或直流电源的电压、电流等参数,实现对电机 等驱动装置的速度调节的系统。
交直流调速系统的分类
直流电机调速系统的仿真模型
01பைடு நூலகம்
建立直流电机数学 模型
根据直流电机的工作原理,建立 电压、电流、转速等物理量之间 的数学关系。
02
建立控制系统模型
03
仿真模型的验证
根据控制策略和控制电路,建立 控制系统的传递函数或状态方程。
通过实验数据或实际系统运行数 据,对仿真模型的准确性和可靠 性进行验证。
交流电机调速系统的仿真模型
详细描述
通过对仿真结果进行统计分析、性能 指标评估等,可以全面了解各种控制 策略和算法在不同工况下的表现。这 有助于选择最优的控制方案,提高调 速系统的性能和稳定性。
05
Matlab仿真的优化与改进
提高仿真的精度和稳定性
算法改进
采用更精确的数值计算方法,如有限差分法、有限元 法等,以提高仿真精度。
图形可视化
Matlab直流调速系统仿真

MATLAB仿真技术大作业实验报告题目:直流调速系统仿真永磁直流电机参数如下:电枢电阻0.2Ω,电枢电感2.4mH,电动势系数0.1V/rpm,转动惯量0.43kg•m2。
仿真中其余电机参数设置为0。
电机负载情况如下:0~1s,电机空载,即负载转矩TL为0;1s~2s,电机满载运行,负载转矩TL为145N•m。
该电机由降压变换器供电。
斩波器使用两个IGBT及其反并联二极管构成单相桥臂,两个IGBT的驱动信号互补,如下图所示。
开关频率2.5kHz,输入电压600V,通过改变IGBT 导通占空比而改变电机端电压(即PWM方式工作)。
仿真使用ode23t求解器。
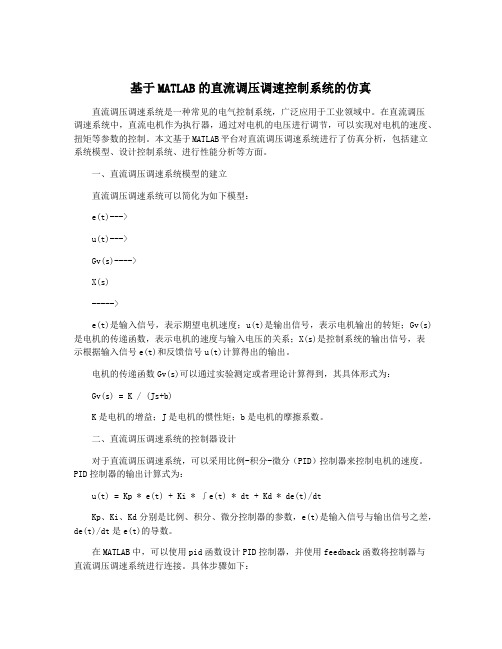
1、电机开环特性通过斩波器给电机供电,电机端电压平均值420V,计算PWM脉冲占空比。
画出转速的波形,画出电机电枢电流的波形。
记录电机起动时的最大电流,记录负载时的稳态电枢电流。
根据仿真结果求出空载和负载时的转速。
(注意电机模型m端口输出的转速单位是rad/s,请将其转为以rpm为单位的波形。
)解:1)斩波器的占空比为V o/Vd,也就是2)以下为转速波形以及电枢电流波形图(经过单位换算,单位为rpm);3)记录电机起动时的最大电流,记录负载时的稳态电枢电流。
由图可知:电机起动时的最大电流为1452A,负载时的稳态电枢电流为153A。
4)根据仿真结果求出空载和负载时的转速。
空载时转速:4200rpm 负载时转速:345.149rad/s = 3900rpm。
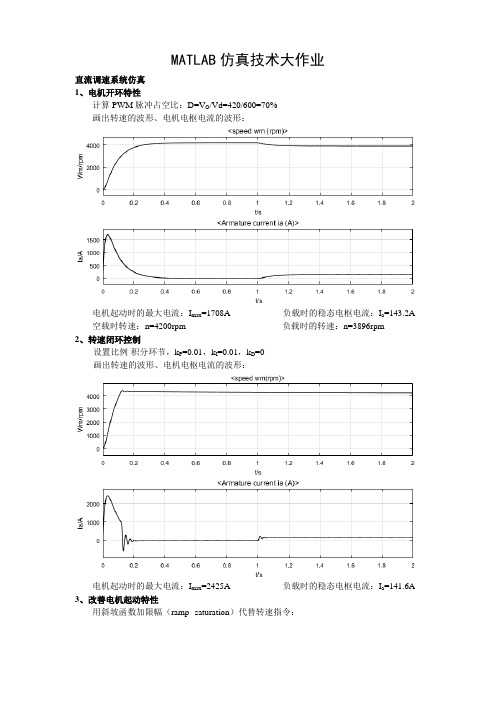
2、转速闭环控制为了改善电机调速性能,对该直流电机系统加入转速闭环控制。
转速控制器使用比例-积分控制器,转速指令为4200rpm,控制器输出量为斩波器的调制波(即占空比)。
调节控制器的比例和积分环节参数以实现较好的动、静态性能。
画出转速的波形,画出电机电枢电流的波形。
记录电机起动时的最大电流,记录负载时的稳态电枢电流。
选取P = 1,I = 7.5 得到如图所示图形,可得转速波形以及电枢电流波形如下图所示记录下电机起动时的最大电流I = 2388.372A ,负载时的稳态电枢电流I = 160.435A 。
第4章 matlab简介与直流调速系统仿真
一、单闭环(内容)1 开环直流调速系统的仿真2 单闭环有静差转速负反馈调速系统的建模与仿真3 单闭环无静差转速负反馈调速系统的建模与仿真4 单闭环电流截止转速负反馈调速系统的建模与仿真5 单闭环电压负反馈调速系统的建模与仿真6 单闭环电压负反馈和带电流正反馈调速系统的建模与仿真7 单闭环转速负反馈调速系统定量仿真8 双闭环直流调速系统定量仿真9 三闭环直流调速系统仿真10 α=β配合控制调速系统仿真11 逻辑无环流可逆直流调速系统仿真12 pwm直流调速系统仿真3 Simulink环境中的系统模型、仿真结果及分析3.1Matlab和Simulink简介3.2 Matlab建模与仿真3.3电流环的MATLAB计算及仿真3.3.1电流环校正前后给定阶跃响的MATLAB 计算及仿真3.3.2绘制单位阶跃扰动响应曲线并计算其性能指标3.3.3单位冲激信号扰动的响应曲线3.3.4电流环频域分析的MATLAB计算及仿真3.4转速环的MATLAB计算及仿真3.4.1转速环校正前后给定阶跃响应的MATLAB计算及仿真3.4.2绘制单位阶跃信号扰动响应曲线并计算其性能指标3.4.3单位冲激信号扰动的响应曲线3.4.4转速环频域分析的MATLAB计算及仿真目录摘要I1双闭环直流调速系统的工作原理1.1双闭环直流调速系统的介绍1.2双闭环直流调速系统的组成1.3双闭环直流调速系统的稳态结构图和静特性1.4双闭环直流调速系统的数学模型2系统设计方法及步骤2.1系统设计的一般原则2.2电流环设计2.2.1确定时间常数2.2.2选择电流调节器结构2.2.3选择电流调节器参数2.2.4校验近似条件2.3转速环设计2.3.1确定时间常数2.3.2选择转速调节器结构2.3.3选择转速调节器参数2.3.4校验近似条件3 Simulink环境中的系统模型、仿真结果及分析3.1Matlab和Simulink简介3.2 Matlab建模与仿真3.3电流环的MATLAB计算及仿真3.3.1电流环校正前后给定阶跃响的MATLAB 计算及仿真3.3.2绘制单位阶跃扰动响应曲线并计算其性能指标3.3.3单位冲激信号扰动的响应曲线3.3.4电流环频域分析的MATLAB计算及仿真3.4转速环的MATLAB计算及仿真3.4.1转速环校正前后给定阶跃响应的MATLAB计算及仿真3.4.2绘制单位阶跃信号扰动响应曲线并计算其性能指标3.4.3单位冲激信号扰动的响应曲线3.4.4转速环频域分析的MATLAB计算及仿真4V-M双闭环直流不可逆调速系统的电气原理总图5总结参考文献电机参数为:调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统,直流电动机:220V,136A,1460r/min,电枢电阻Ra=0.2Ω,允许过载倍数λ= 1.5;电枢回路总电阻:R= 0.5Ω,电枢回路总电感:L= 15mH,电动机轴上的总飞轮力矩:GD2= 22.5N·m2,晶闸管装置:放大系数Ks=40,电流反馈系数:β=0.05V/A,转速反馈系数:α=0.007Vmin/r,滤波时间常数:Toi=0.002s ,Ton=0.01s设计要求:(1)稳态指标:转速无静差;(2)动态指标:电流超调量σi≤5%,空载起动到额定转速的转速超调量σn≤10%。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速系统是一种常见的电气控制系统,广泛应用于工业领域中。
在直流调压调速系统中,直流电机作为执行器,通过对电机的电压进行调节,可以实现对电机的速度、扭矩等参数的控制。
本文基于MATLAB平台对直流调压调速系统进行了仿真分析,包括建立系统模型、设计控制系统、进行性能分析等方面。
一、直流调压调速系统模型的建立直流调压调速系统可以简化为如下模型:e(t)--->u(t)--->Gv(s)---->X(s)----->e(t)是输入信号,表示期望电机速度;u(t)是输出信号,表示电机输出的转矩;Gv(s)是电机的传递函数,表示电机的速度与输入电压的关系;X(s)是控制系统的输出信号,表示根据输入信号e(t)和反馈信号u(t)计算得出的输出。
电机的传递函数Gv(s)可以通过实验测定或者理论计算得到,其具体形式为:Gv(s) = K / (Js+b)K是电机的增益;J是电机的惯性矩;b是电机的摩擦系数。
二、直流调压调速系统的控制器设计对于直流调压调速系统,可以采用比例-积分-微分(PID)控制器来控制电机的速度。
PID控制器的输出计算式为:u(t) = Kp * e(t) + Ki * ∫e(t) * dt + Kd * de(t)/dtKp、Ki、Kd分别是比例、积分、微分控制器的参数,e(t)是输入信号与输出信号之差,de(t)/dt是e(t)的导数。
在MATLAB中,可以使用pid函数设计PID控制器,并使用feedback函数将控制器与直流调压调速系统进行连接。
具体步骤如下:1. 建立直流调压调速系统的模型;2. 调用pid函数,设计PID控制器,并设置控制器的参数;3. 调用feedback函数,将控制器与直流调压调速系统进行连接;4. 设计输入信号e(t);5. 运行模拟程序,观察系统的输出信号u(t)。
三、直流调压调速系统的性能分析在直流调压调速系统的仿真中,可以通过观察系统的输出信号u(t)来评估系统的性能。
直流调速系统的Matlab仿真(课程设计作业)

运动控制系统课程设计班级电信2014姓名张庆迎学号************摘要直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。
本文从直流电动机的工作原理入手,建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。
然后按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
在理论分析和仿真研究的基础上,本文设计了一套实验用双闭环直流调速系统,详细介绍了系统主电路、反馈电路、触发电路及控制电路的具体实现。
对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。
采用MATLAB软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。
关键词直流电机直流调速系统速度调节器电流调节器双闭环系统Abstract DC motor has been widely used in the area of electric drive because of its neatly adjustment, simple method and DC motor has been widely used in the area of electric drive because of its neatly adjustment, simple method and smooth control in a wide range, besides its control performance is excellent. Beginning with the theory of DC motor, this dissertation builts up the mathematic model of DC speed control system with double closed loops, detailedly discusses the static and dynamic state performance of the system. Afterward, according to automation theroy this papar calculates the parameters of the system. Then, this dissertation simulates and analyzes the system by means of Simulink. The results of simulation are consistent with theory calculation. Some experience was acquired through simulation. Based on the theory and simulation, this dissertation designs a DC speed control system with double closed loops, discusses the realization of main circuit, feedback circuit, control circuit and trigger circuit. The results of experiment show that the static and dynamic state performance of this system are good, which indicate that the design can meet the puter-aided analysis and design are carried out for speed-controlling system of the d-c motorby by using TOOL BOX and SIMULINK.Keywords DC motor, DC governing system, speed governor, current governor, double loop control system, simulink一、双闭环直流调速系统的工作原理1、双闭环直流调速系统的介绍双闭环调速系统的工作过程和原理:电动机在启动阶段,电动机的实际转速(电压)低于给定值,速度调节器的输入端存在一个偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器, 此时则以最大电流给定值使电流调节器输出移相信号,直流电压迅速上升,电流也随即增大直到等于最大给定值, 电动机以最大电流恒流加速启动。
MATLAB与交直流调速系统仿真

在未来,我们可以进一步研究和改进交直流调速系统的控制策略和效率。
Hale Waihona Puke MATLAB与交直流调速系 统仿真
MATLAB与交直流调速系统仿真的背景
交直流调速系统的原理
1 交流调速系统
采用变频器或触发控制器对交流电机的电源 频率进行调整来改变其转速。
2 直流调速系统
使用变阻器或变压器来调节直流电机的电流, 从而改变其转速。
MATLAB在交直流调速系统中的应用
1 数学建模
性能评估
分析不同控制算法的性能表现,找到最佳控制策略。
系统优化
通过仿真结果来改进交直流调速系统的响应速度和 稳定性。
问题与挑战
1 模型准确性
建立准确的数学模型是交直流调速系统仿真 的挑战之一。
2 控制算法设计
选择和设计适合交直流调速系统的高性能控 制算法也面临着一些困难。
总结与展望
总结成果
通过MATLAB仿真,我们可以更深入地了解交直流调速系统,并优化其性能。
使用MATLAB建立交直流调速系统的数学模型,包括电流、转速和扭矩方程。
2 控制算法开发
使用MATLAB进行控制算法设计和调试,以实现高效的调速性能。
仿真实例展示
系统性能
通过MATLAB仿真,评估交直流调速系统的转速响应 和动态性能。
电流响应
分析在不同负载和输入电压条件下,电机的电流响 应。
结果分析与讨论
MATLAB直流调速系统仿真
MATLAB仿真技术大作业直流调速系统仿真1、电机开环特性计算PWM脉冲占空比:D=V O/Vd=420/600=70%画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=1708A 负载时的稳态电枢电流:I a=143.2A 空载时转速:n=4200rpm 负载时的转速:n=3896rpm2、转速闭环控制设置比例-积分环节,k P=0.01,k I=0.01,k D=0画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=2425A 负载时的稳态电枢电流:I a=141.6A 3、改善电机起动特性用斜坡函数加限幅(ramp--saturation)代替转速指令:斜坡斜率设为8400,限幅设为4200。
画出转速的波形、电机电枢电流的波形:电机起动时的最大电流:I max=619.7A4、简化降压斩波器降压斩波器只使用一只IGBT和一只二极管时,再次进行仿真。
画出电机电枢电流的波形与第3问的波形进行比较:与第3问的波形进行比较:t=0.3s时,I a(3)=379.3A I a(4)=379.3At=0.8s时,I a(3)=-8.92A I a(4)=-0.02107At=1.5s时,I a(3)= 143.4A I a(4)=143.8A通过对比,可知三段波形的数值几乎无差别或差别非常小可忽略不计;但波形显示在t=0.5s 左右时第四问波形的纹波值比第三问波形的纹波值小。
因为器件替换后,各部分的功能并未发生变化,电路的正常工作状态并未受到影响,因此用不同的降压斩波器波形几乎无差别。
纹波的区别可能是因为二极管与带反并联二极管的IGBT、不带反并联二极管的IGBT与带反并联二极管的IGBT结构上的区别所导致。
交—直—交变频调速系统仿真

4 MATLAB仿真应用计算机仿真技术对交直流调速系统进行仿真分析,可以加深我们对所有理论的理解,提高实践动手能力。
计算机仿真还是一种低成本的实验手段,近年来获得了广泛的应用。
目前,使用MATLAB对控制系统进行计算机仿真的主要方法是:以控制系统的传递函数为基础,使用MATLAB的Simulink工具箱对其进行计算机仿真研究。
本章就对PWM交流变频调速的MATLAB仿真作以研究。
4.1 Matlab软件简介MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB和Mathematica、Maple并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
Matlab有以下诸多优势:(1)友好的工作平台和编程环境MATLAB由一系列工具组成。
这些工具方便用户使用MATLAB的函数和文件,其中许多工具采用的是图形用户界面。
包括MATLAB桌面和命令窗口、历史命令窗口、编辑器和调试器、路径搜索和用于用户浏览帮助、工作空间、文件的浏览器。
随着MATLAB的商业化以及软件本身的不断升级,MATLAB的用户界面也越来越精致,更加接近Windows的标准界面,人机交互性更强,操作更简单。
而且新版本的MATLAB提供了完整的联机查询、帮助系统,极大的方便了用户的使用。
简单的编程环境提供了比较完备的调试系统,程序不必经过编译就可以直接运行,而且能够及时地报告出现的错误及进行出错原因分析。
(2)简单易用的程序语言Matlab一个高级的矩阵/阵列语言,它包含控制语句、函数、数据结构、输入和输出和面向对象编程特点。
MATLAB与交直流调速系统仿真
连接到其它附加电路中,而鼠笼式电机无此输出端子;
• m:电机信号输出端子,一般接电机测试信号分配器观测电
机内部信号,或引出反馈信号。
MATLAB应用技术
转子类型列表框,分别可以将电机设置为绕线式 (Wound)和鼠笼式(Squirrel-cage)两种类型
参考坐标列表框,可以选择 转子坐标系(Rotor)、静 止坐标系(Stationary)、同 步旋转坐标系(Synchronous)
500
400
300
200
100
0
0
1
2
3
4
5
6
7
8
9 10
图 电磁转矩波形
从仿真结果可以分析:转速能够在较短的时间内达到稳定,但起动 电流冲击很大,同时电磁转矩的冲击也很大。
MATLAB应用技术
例2.直流电动机分级起动 由于直流电动机直接起动电流过大,为了限制起动电流,通常在电源和电动机之
间加上起动变阻箱。 起动变阻箱由三个电阻组成,在每个电阻两端并联一个理想开关,通过设置开关
不同的导通时间,来切除电阻。起动瞬间,三个开关全部断开,此时电阻全部接 入。一定时间后,第一个开关导通,相应地第一个电阻被切除。依此类推,达到 限制电流和保证电磁转矩的目的。
MATLAB应用技术
MATLAB应用技术
1.使用模块 (1)断路器(Breaker) 断路器取自SimPowerSystems工具箱中的Elements库里的Breaker模块
MATLAB应用技术
2.仿真参数设置
MATLAB应用技术
3.仿真结果
1400
1200
1000
800
600
400
200
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F+和F-:此端子为直流电动机励磁电路控制端子,分别连接励磁电源的正极与负极; A+和A-: 电动机电枢回路控制端; TL:电动机的负载转矩信号输入端;
m: 电动机信号的测试端,包括转速w(rad/s),电枢电流Ia(A), 励磁电流If(A),电磁转矩Te(N.m)。
W ( s ) X X c r T d T m s 1 2 C T e m s 1 0 . 0 1 0 2 . 0 8 . s 1 2 5 0 . 8 8 s 1 5 0 . 0 s 2 5 . 4 2 0 . 8 s 1 1 W (s) 5 .41 2.7 50
0 .0s2 2 0 .8 s 1s24s 050
精品课件
MATLAB应用技术
3、直流电动机数学模型的状态空间表达式实现
xx12200 .1.108083 125
20.0118035xx12021103u
x x 1 20.0 40014904 .5 2x x1 25 00u0
输出方程
y 0
1
x1 x2
精品课件
MATLAB应用技术
直流电动机1的状态空间表达式为:
MATLAB应用技术
清华大学出版社
王忠礼 段慧达 高玉峰编著
精品课件
4.MATLAB与交直流调速系统仿真
精品课件
MATLAB应用技术
1 MATLAB基本知识
•4.1控制系统及控制技术指标与要求
4.1.1自动控制和自动控制系统介绍 自动控制是指在无人直接参与的情况下,利用控制装置使被控对 象,如机器设备、生产过程中的速度、温度、压力等物理量自动 的按照预定规律运行或变化的处理过程。并将这种能对被控制对 象的工作状态进行自动控制的系统称为自动控制系统。
nmax100%
nref
(3)调节时间ts
调节时间是指输出响应曲线与稳态值之差 达到允许范围内(一般取稳态值的±2%或 ±5%)所需要的时间,而且以后不再超出这 个范围。
(4)振荡次数N
精品课件
MATLAB应用技术
3、抗扰动指标
(1)动态速降 动态速降是指扰动引起的最大转速偏差
nmax
(2)恢复时间 t f
根据是否把系统输出信号进行反馈并参与控制而将自动控制系 统又分为开环控制系统和闭环控制系统。
精品课件
MATLAB应用技术
4.1.2控制系统的技术指标与要求
控制系统的技术指标通常分为静态指标和动态指标两大类。
1、静态指标
⑴调速范围 生产机械要求电动机在额定负载时提供的最高转速 nmax与最低转速nmin之比叫做 调速范围,表示为:
x1
x2
40 0.00144
92.5x1 0 x2
500
0
u
y 0
பைடு நூலகம்
1
x1 x2
其中,输入量: u ud 状态变量: x1id,x2n ,输出量为: yn
精品课件
MATLAB应用技术
4、基于电气原理图的直流电动机数学模型实现
电动机模型位于SimPowerSystems工具箱下machines库中的DC machines 和DiscreteDC machines分别是直流电动机和离散直流电动机模型
精品课件
MATLAB应用技术
4.2.2 直流电动机数学模型
以他激式直流电动机为例分析直流电动机数学模型
Ld
Rd
TL
id Ud
+
n
EM
-
电枢回路的微分方程式:
ed idRd Ld ddditud
机械运动方程
TdTmdd22nt TmddntnC ude
精品课件
MATLAB应用技术
直流电动机对象引入两个状态变量: x1id,x2n ,仍然选取输入量:
指由扰动作用瞬间到输出量恢复到允许范围内(一般取稳态值的±2% 或±5%)所经历的时间。
(3)振荡次数N
振荡次数N为在恢复时间内被调量在稳 态值上下摆动的次数,它代表系统的稳 定性和抗扰能力的强弱。
精品课件
MATLAB应用技术
4.2 直流电动机模型与MATLAB的实现
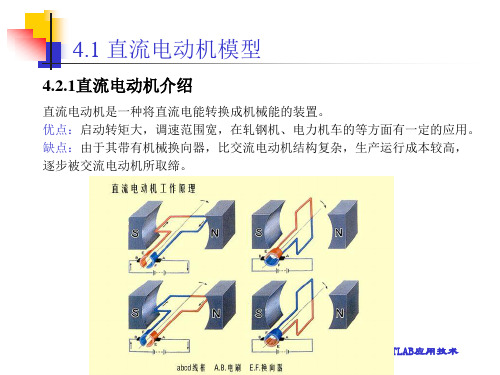
4.2.1直流电动机介绍
直流电动机是一种将直流电能转换成机械能的装置。由于其带有 机械换向器,较比交流电动机结构复杂,生产运行成本较高,并 有逐步被交流电动机所取缔。但是由于直流电动机具有启动转矩 大,调速范围宽等优势,在轧钢机、电力机车的等方面有一定的 应用。同时由于直流电动机原理简单,理论基础厚重,对电机学 习者具有很强的吸引力。
u ud ,输出量为: yn
状态空间表达式:
x1 x2
Rd Ld
CM
GD2
Ce Ld 0
xx12
1 Ld
0
u
y x2 0
1xx12
精品课件
MATLAB应用技术
4.2.3直流电动机模型在MATLAB中的实现
直流电动机数学模型形式主要有三种表现形式,包括动态微分方程式或者 差分方程式、传递函数或者脉冲传递函数、状态空间表达式, 1、直流电动机参数计算
Ld Rd
2103 0.02s5 0.08
机电时间常数: T mG 32 7 D C R m 5 C de31 7 0 .2 1 5 0 .0 5 8 0 .1 88 0 2 .8 s
精品课件
MATLAB应用技术
2、直流电动机数学模型的传递函数形式实现 直流电动机数学模型的传递函数表达形式:
计算得到此直流电动机的相关参数:
电势常数: C e U no n n I m n oR o m am 2 2 1 70 0 0 0 .0 0 0 5 0 0 .1V 8 /r ( 5 m 1 )im 转矩常数: CM1C .0e 3 01..108350.1k8.g mA
电磁时间常数:
Td
已知某直流电动机调速系统(在本章中简称系统I),控制系统主回路 与直流电动机的主要参数如下:
电动机: Pnom150kWInom700A Ra 0.05 nnom 100r/0min 主回路: Ld 2mH Rd 0.08 全控桥式整流 m6 负载及电动机转动惯量:GD 2 12k5gm2
精品课件
MATLAB应用技术
Dnmax/nmin
⑵静差率 调速系统的静差率是指电动机稳定运行时,负载由零增加到额定值时,对 应的静态转速降与理想空载转速之比称作静差率S,即
Sn0 nnomnnom
n0
n0
精品课件
MATLAB应用技术
2、动态指标 ⑴ 跟随指标
(2)最大超调量 %
指输出响应与给定值的最大偏差量Δnmax(t)与给定值nref(t)之比,即