NAO机器人参数
法国NAO机器人介绍(一)
法国NAO机器人介绍(一)引言概述:法国NAO机器人是由法国软银机器人公司(SoftBank Robotics)研发的,它是一款智能社交机器人,具备人工智能和机器学习等高级技术。
它在教育、研究、娱乐等领域有广泛的应用。
本文将从五个方面介绍法国NAO机器人的特点和应用。
正文:1. 外观与设计- NAO机器人采用小巧可爱的外观设计,高度为58cm。
它有一个圆形头部,两只大眼睛和可动的手臂以及腿部。
- 外观具有丰富的表情和动作表达能力,充满人性化的设计。
2. 高级功能与技术- NAO机器人搭载了语音识别和自然语言处理技术,能够与人进行沟通和对话。
- 它还具备人脸识别技术,能够辨认不同的人类面孔,并对每个人做出个性化的反应。
- NAO机器人还支持机器学习,可以根据与人类的互动不断学习和改进自己的表现和行为。
3. 应用领域与案例- 在教育领域,NAO机器人可以作为教学助手,辅助教师进行教学,提供趣味和互动的学习体验。
- 在研究领域,NAO机器人可被用于人机交互研究与实验,以便改进人机接口和智能机器人的设计。
- 在娱乐领域,NAO机器人可以作为表演者与观众进行互动,增强娱乐活动的趣味性。
4. 开发平台与工具- NAO机器人提供丰富的软件开发平台和工具,以便用户能够进行机器人程序的开发和编程。
- 用户可以使用Python、C++等编程语言,通过调用API接口实现与机器人的交互和控制。
5. 可持续发展与未来展望- NAO机器人凭借其先进的技术和多样化的应用领域,展示了巨大的潜力。
- 未来,NAO机器人有望在更多领域得到应用,如医疗护理、家庭服务等,为人们的生活带来更多便利和乐趣。
总结:通过介绍法国NAO机器人的外观与设计、高级功能与技术、应用领域与案例、开发平台与工具以及可持续发展与未来展望,我们可以看到NAO机器人作为一款智能社交机器人,已经在教育、研究、娱乐等领域展现出了强大的应用潜力,并且在未来有望进一步扩展应用领域,为人们带来更多乐趣和便利。
NAO机器人招标参数及配置清单
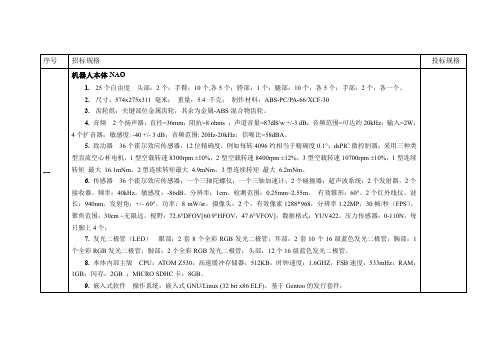
7. 发光二极管(LED) 眼部:2 套 8 个全彩 RGB 发光二极管;耳部:2 套 10 个 16 级蓝色发光二极管;胸部:1 个全彩 RGB 发光二极管;脚部:2 个全彩 RGB 发光二极管;头部:12 个 16 级蓝色发光二极管。
8. 本体内部主版 CPU:ATOM Z530,高速缓冲存储器:512KB,时钟速度:1.6GHZ,FSB 速度:533mHz;RAM: 1GB;闪存:2GB ;MICRO SDHC 卡:8GB。
套 个
数量
配置与技术指标
1
高度 约 58 cm 重量 约 5.4 kg
1 电池能量 持续时间约 90 min
1 专用包装箱
1 充电器 AC 90-230 V/DC 24 V 1 220V 国内版专用插头
9. 嵌入式软件 操作系统:嵌入式 GNU/Linux (32 bit x86 ELF),基于 Gentoo 的发行套件;
投标规格
10. 编程语言:机器人本体支持 C++/Python 编程语言, 上位机支持:C++/Python/.NET/Jave/MatLab/Choregrahpe 编程 语言。
法国NAO机器人介绍

法国NAO介绍法国NAO介绍一、概述法国NAO是一款拥有技术的人形。
其外形酷似一个小孩,身高约为58厘米,具有丰富的动作和表情,可以与人类进行交互和沟通。
NAO广泛应用于教育、研究、娱乐等领域。
二、功能介绍1.语音识别与语音合成功能NAO配备了先进的语音识别和语音合成技术,可以通过语音指令与用户进行对话。
它能够识别和理解中文、英文等多种语言,并且能够以流利的语速与用户进行交流。
2.视觉功能NAO配备了多种摄像头和传感器,能够实现人脸识别、物体识别和环境感知等功能。
它可以根据环境变化自动调整动作和表情,以更好地适应不同的场景。
3.动作与表情NAO具备丰富的动作与表情,可以模仿人类各种动作,如走路、跳舞等。
它还能够表达丰富的情感,如高兴、难过、惊讶等,以增强与用户的交流和互动。
4.编程与开发NAO提供了丰富的编程接口与开发工具,支持多种编程语言,如Python和C++等。
用户可以根据自己的需求对进行编程和定制,以实现各种复杂的功能和应用。
三、应用领域1.教育领域NAO在教育领域有着广泛的应用。
它可以作为教辅工具,辅助教师讲解课程内容,并与学生进行互动。
此外,NAO也可以帮助儿童学习编程和发展创造力。
2.研究领域由于NAO具有良好的交互能力和可编程性,它被广泛应用于和研究领域。
研究人员可以利用NAO进行各种实验和研究,以推动和技术的发展。
3.娱乐领域NAO在娱乐领域也有着一定的应用。
例如,在儿童主题公园中,可以搭配NAO为孩子们提供互动娱乐体验。
此外,NAO还可以参与舞台表演和展览等活动。
四、附件本文档附件包括NAO产品手册、技术规格说明和相关案例分析。
五、法律名词及注释1.(Artificial Intelligence,简称):指计算机系统通过模拟人类的思维过程,具备识别、学习、推理、决策等智能行为的能力。
2.编程接口(Application Programming Interface,简称API):指软件系统提供的用于访问和操作其功能和数据的接口。
nao材质参数
nao材质参数
NAO机器人的材质参数如下:
1. 外壳材质:NAO机器人的外壳通常由高强度塑料制成,具有良好的韧性和耐用性。
2. 关节材质:NAO机器人的关节通常由金属材料制成,如铝合金和不锈钢。
这些材料具有较高的强度和耐磨性,能够承受机器人的运动和重量。
3. 外壳涂层:为了增加NAO机器人的外观质感和防尘防水性能,外壳通常会进行涂层处理。
这些涂层可以抗刮花和防止外壳受损。
4. 传感器材质:NAO机器人的传感器通常由高质量的材料制成,如光敏电阻器、压力传感器等。
这些材料能够精确地感知环境和人机交互信息。
总的来说,NAO机器人的材质参数设计旨在提供稳定性、耐用性和良好的人机交互性能。
NAO介绍

案 例 参 考
NAO是人形机器人, 为MAS技术提供了实现 平台
人机交互
返回目录
人机交互
特 点 及 优 势
• 个高清摄像头 2 NAO 是人形机器人,
为MAS技术提供了实现 平台 支持Wifi 支持蓝牙 ATOM Z530 1.6GHz 中 央处理单元
表 现 形 式
NAO是人形机器人, 为MAS技术提供了实 现平台 支持Wifi 支持蓝牙 ATOM Z530 1.6GHz 中央处理单元
2 SD 卡槽 • 个高清摄像头 开源Linux Gentoo 允许在远程模式下, 对大量数据的实时计算 处理
表 现 形 式
远程模式和机器人本地 模式两种编程方式,使 用相同的API(两者可以 方便切换)。远程模式 编程可以提供更强劲的 计算能力(把机器人作 为接口)。
案 例 参 考
面部识别
社交型机器人 能说/听/看 软件开发包包含高阶 API
表 现 形 式
更加贴近科研人员的 研究领域。科研人员 只需关注于自身的研 究课题,无需关注机 器人所有的软硬件低 层实现。(诸如软件 开发包中的语音合成, 语音识别,步态行走, 物体识别等等)
案 例 参 考
使用在线云计算的文字 识别演示
人工智能
院校名称
合肥工业大学 计算机与信息学院 情感计算研究所 东南大学 仪器科学学院 厦门大学 信息科学与技术学院 脑科学实验室 信号处理及仿生智能计算,人机交互与 虚拟现实技术 人工智能
研究方向
情感计算
哈尔滨工业大学
计算机学院
人工智能、智能机器人、机器人足球、 虚拟现实
人工智能
智能机器人
返回目录
表 现 形 式
1.NAO机器人概述-NAO机器人程序设计-王大东-清华大学出版社

1.1.1 NAO机器人系统
3.机器人特有硬件
(3)传感器
NAO使用传感器接收外部信号、获取机器人内部状态信息。
①接触传感器:触摸、按压、划过接触传感器可以触发接触 传感器产生电信号,进而完成向机器人输入信息。
向机器人输入开关量的接触传感器,包括头部触摸传感器 (由前、中、后三个触摸传感器组成),手部触摸传感器,脚 前部的碰撞传感器(也起到缓冲作用)。触摸其中任何一个传 感器都会向NAO发出信号。
NAO能够“听见”声音,并且能辩别出声音方向,也能 “说”出悦耳的声音。听和说的硬件是麦克风和扬声器。
扬声器:头部每个侧面分别安装了1个最大输出功率为2W 高音质扬声器,最高输出频率20KHz。
麦克风:头部4个,灵敏度40dB,频率范围150Hz- 12kHz。NAO利用双耳的到达时间差进行声源定位,通过 运算检测到声源的方向,实现与人互动。
1.1.1 NAO机器人系统
3.机器人特有硬件
(2)超声波(声纳)
NAO安装超声波器件的目的是测量障碍物距离。
NAO有两套超声波发射器/接收器,位于胸部两侧,上方是 发送器,下方是接收器。
超声波工作原理与雷达类似。超声波发送器发出超声波,并 等待声波回传。如果在一定时间内没有接收到超声波的回声, 则认为在有效检测距离内没有障碍物。如果接收器收到了回 声,根据返回时间,可以计算出得到障碍物的距离。NAO 能够探测前方0.25-2.55米范围内是否有障碍物,探测角度 60度,超声波频率为40KHz。
3.机器人特有硬件
(3)传感器
②惯性传感器:测量身体状态及加速度,包括2个陀螺仪, 1个加速度计。
③位置传感器(MRE磁性编码器):测量机器人自身关节 位置,36个。如在录制舞蹈过程中,位置传感器可以测量 机器人各关节数据,最终将这些数据存储以记录机器人的状 态。
NAO机器人技术参数
NAO技术参数
NAO技术参数:
1、外观
1.1 尺寸:高度、宽度、深度
1.2 重量:总重量、重心位置
1.3 外壳材料:材质、颜色
1.4 响应式感应器:头部、身体等部位的传感器位置和类型
2、硬件
2.1 处理器:类型、主频、核心数
2.2 内存容量及类型
2.3 存储容量及类型
2.4 连接接口:USB、以太网等接口类型和数量
2.5 电源:电池组或外接电源
2.6 摄像头:分辨率、焦距、快门速度
2.7 麦克风:数量、位置、音频采样率
2.8扬声器:类型、功率
2.9传感器:陀螺仪、加速度计、触摸传感器等
2.10 轮子和关节:数量、类型、运动范围
3、软件
3.1 操作系统:基于Linux的版本
3.2 编程环境:支持的编程语言、IDE、SDK等
3.3 功能:语音识别、图像识别、自然语言处理等 3.4 控制算法:运动控制、路径规划等算法细节
3.5 传感器数据处理:传感器数据读取和处理的方法
3.6 网络通信:支持的通信协议和接口
4、功能
4.1 语音交互:语音识别、语音合成、对话交互功能 4.2 图像处理与识别:人脸识别、物体识别等
4.3 动作控制:步行、跳舞、迎宾等动作控制功能 4.4 社交互动:表情、手势、触摸等社交互动功能 4.5 学习能力:自主学习、知识库管理等
4.6 多协作:与其他的协作能力
5、附件
本文档附带以下附件:
- [NAO产品手册](附件)
- [NAO技术规格表](附件)
- [NAO用户指南](附件)
6、法律名词及注释
- 法律名词1:相关注释或解释 - 法律名词2:相关注释或解释 - 法律名词3:相关注释或解释。
NAO机器人你不知道的核心功能

kate07
目录
01. NAO机器人简介 02. NAO机器人核心功能
NAO机器 人简介
NAO机器人是一款适合科研、教学和展示的理想合作 平台!2007年7月,被ROBOCUP机器人世界杯组委会 作为标准平台组的官方平台。
智能机器人,人形机器人,教学机器人,竞赛机器人, robocup比赛用机器人,展览展示机器人,科技馆用机 器人。
谢谢观看
单击此处添加副标题内容
卡特07 2020.4.10
NAO机器人一台 电池一块 充电器一个 AUS电源线一根 软件dvd光盘一张 用户手册一份 安全手册一份
质保期一年
NAO-V5智能人形机器人
NAO机器 人
NAO机器人动作灵活,拥有一个惯性导航仪装置,以保持在移动模式下的平稳。还可以靠声纳传感器探测并绕过障碍物,这使它的活动十分准确。 每只脚上配备有四个压力传感器,用来确定每只脚压力中心的位置,并进行适当调整让NAO更好的保持平衡。
NAO机器 人核心功 能
1.25个自由度,能模仿人类大部分动作 2.双手抓取300的重物 3.wiif802.11无线网络何以太网端口,可以远程遥控机器人 4.在嘈杂环境下能将语音内容转接到大型功放系统 5.双图像处理能力,具有物体识别何人脸追踪 6.可以身高 58cm 体重 5.2kg 外壳材料:工程塑料 电源:2.15ah/21.6V锂电池 正常工 作90分钟 25个自由度 多媒体:4个麦克风,2个扬声器 视觉:2个CMOS数字摄像头 视野 60度 分辨率1288*968 速度30fps NAO机器人配置清单
NAO机器人

红色球员的H值设定为0,允许误差为正负5。
目标识别结果
图2 红色球员识别效果(黑框中显示)
目标识别结果
图3 蓝色机器人
定义蓝色机器人(图3)颜色特征的RGB值为:0000FF 采集次数
颜色通道
R
1
52
2
0
3
0
4
0
5
84
6
34
7
0
8
30
9
0GB H来自52255 225
0
204 225
0
203 225
S分量:
3 S 1 min( R, G, B) ( R G B)
I RG B 3
I分量:
目标识别结果
首先,从比赛环境中截 取目标图像,然后利用 吸管进行颜色采集。吸 管可以提取出选定像素 点的颜色信息RGB值。
图1 红色机器人
定义红色机器人(图1)颜色特征的RGB值为:FF0000 采集次数 颜色通道 R G B H 1 213 20 20 0 2 255 44 44 0 3 255 75 75 0 4 255 85 85 0 5 255 16 16 0 6 255 50 50 0 7 255 26 26 0 8 255 43 43 0 9 255 48 48 0
Nao机器人视觉模块
Nao机器人头部装 有虚拟彩色摄像头, Nao机器人队员通 过摄像头获得周围 环境的图像信息, 视觉模块需要对该 彩色图像进行处理 和分析,从中识别 出目标对象。视觉 模块还包括Nao机 器人头部关节的状 态角,这用于求取 目标物体与机器人 的相对位置信息
Nao机器人视觉模块
图 RGB(左)和HSI(右)模型示意图
RGB转HSI
NAO机器人技术参数
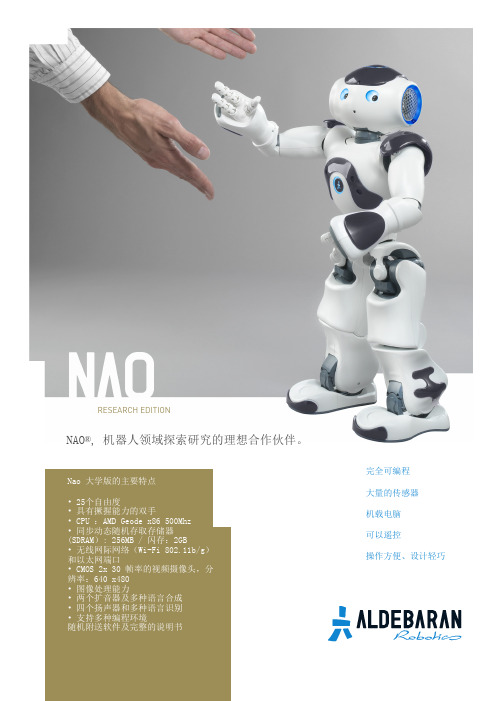
NAO®, 机器人领域探索研究的理想合作伙伴。
Nao 大学版的主要特点
• 25个自由度 • 具有撅握能力的双手 • CPU :AMD Geode x86 500Mhz N•ao同Ac步ade动mi态cs 随Edi机tion存ke取y fe存atu储re器s (SDRAM): 256MB / 闪存:2GB -•25无De线gre网es际of F网re络edo(m Wi-Fi 802.11b/g) -和Tw以o p太reh网en端sile口hands -•x8C6MAOMSD G2exode30500帧Mh率z C的PU视频摄像头,分 -辨25率6 M:B S6D4R0AMx4/ 280GB Flash memory • 图像处理能力 -•Wi两-Fi个802扩.11音b a器nd及eth多er种net语po言rt 合成 -•2x四30个FP扬S C声MO器S v和ide多oca种m 语res言. 64识0x4别80 -•Vis支ion持pr多oce种ssi编ng程cap环ac境ities -随Tw机o l附oud送spe软ak件ers及an完d E整ngl的ish说vo明cal书synthesis
Nao®是一个身高58公分的两足机器人。它是Aldebaran RoboticsTM 公司四年潜心研究的成果,集多种软、硬件为一身,兼有出色的外 形设计。 Nao是同类机器人中的佼佼者。其硬件采用最新科技设计制造,保证 了Nao动作的流畅性,还配备了多种传感器。此外,Nao可在Linux、 Windows或Mac OS X等操作系统下编程,并随机提供完整的软件和使 用说明书。
整体特性
机体规格与材料
高度 重量 机体材料
能量
充电器 电池能量
法国NAO机器人介绍(二)2024
法国NAO机器人介绍(二)引言:法国NAO机器人作为一款具有先进技术和人性化设计的人形机器人,备受关注。
本文旨在介绍法国NAO机器人的特点、功能以及应用领域。
正文:1. 外观与设计- NA0机器人采用人形设计,身高约为58厘米,具有可爱的儿童样貌,拥有13个关节,可以做出多达25个自然动作。
其外观设计简洁大方,色彩鲜艳,吸引人眼球。
2. 技术特点- NA0机器人搭载了强大的语音识别和语言交流系统,能够识别和理解人类语言,实现智能对话。
此外,NA0机器人还具备人脸识别、触摸感应、姿势控制等技术,可以与人类进行互动。
3. 功能应用- 教育领域:NA0机器人可以作为一位优秀的教育助手,辅助教师进行儿童教育,帮助孩子学习语言、科学等知识。
- 医疗领域:NA0机器人可以作为陪护机器人,为患者提供精神支持和娱乐活动,缓解病人的孤独感。
- 娱乐领域:NA0机器人可以参与舞蹈、音乐等表演活动,为观众带来视听盛宴,增加娱乐活动的互动性。
- 商业领域:NA0机器人可以作为导购员或服务员,为客户提供导购、服务等咨询和指导。
- 科研领域:NA0机器人还被广泛应用于人工智能领域的研究,可以为研究人员提供数据采集、实验参与等支持。
4. 进一步发展- 近年来,法国NA0机器人在技术上不断改进,从硬件到软件都有了重大突破。
未来,NA0机器人有望实现更加复杂的语言交流、更加精准的动作控制,进一步拓展其应用领域。
5. 局限性与挑战- 尽管法国NA0机器人在人工智能和机器人技术方面取得了巨大进展,但仍存在局限性。
例如,其成本较高,普及度有限。
此外,机器人与人类的互动仍然存在一定的技术挑战,如情感交流的复杂性。
总结:法国NA0机器人作为一款先进的人形机器人,具备可爱的外观和出色的功能。
它在教育、医疗、娱乐、商业和科研领域都有广泛的应用前景。
尽管还存在一定的局限性和挑战,但随着技术的不断发展,NA0机器人有望进一步实现功能的扩展和应用的普及。
NAO机器人
NAO介绍:NAO是一个多用途的人形,由法国开发公司AldebaranRobotics设计和制造。
该具备先进的和机器视觉技术,具有广泛的应用领域,在教育、医疗、娱乐和研究等领域都有重要的应用价值。
1.技术规格在这一部分,我们将详细介绍NAO的技术规格,包括的尺寸、重量、传感器、处理器、通信方式等。
2.外观及功能这一部分将提供有关NAO外观和各个部件的详细信息,例如头部、身体、手臂、腿、视觉系统和声音系统等。
我们还将介绍的基本功能,如运动、语音识别、面部识别和物体识别等。
3.应用场景在这一部分,我们将探讨NAO在不同领域的应用场景。
主要包括教育、医疗、娱乐和研究领域。
我们将讨论在学校教育中的应用,医疗机构中的辅助治疗和护理,以及在娱乐活动和研究项目中的应用。
4.开发和编程这一部分将介绍如何开发和编程NAO。
我们将讨论使用的开发环境和编程语言,以及的编程接口和开发工具。
我们还将提供一些示例代码和教程,以帮助用户入门。
5.支持和维护在这一部分,我们将说明NAO的支持和维护政策。
包括技术支持、维修服务和软件更新等。
我们还将提供相关联系方式,以便用户获取帮助和解决问题。
附件:- NAO技术规格表- NAO开发手册- NAO编程示例代码法律名词及注释:1.(Artificial Intelligence,简称):是指通过计算机模拟和实现人类智能的一种技术和方法。
2.机器视觉(Computer Vision):机器视觉是一种通过计算机和摄像机等设备模拟和实现人类视觉的技术。
3.肢体运动(Motion):的肢体运动是指利用自身机械结构和电动装置实现的各种动作和姿态调整。
4.语音识别(Speech Recognition):语音识别是一种将语音信号转换为可识别文本或命令的技术。
5.面部识别(Facial Recognition):面部识别是一种通过分析人脸图像来识别和验证人脸身份的技术。
6.物体识别(Object Recognition):物体识别是一种通过计算机视觉技术来识别和分类物体的能力。
仿人机器人 第三章 NAO机器人
仿人机器人第三章 NAO机器人在科技飞速发展的今天,仿人机器人已经成为了一个备受关注的领域。
而在众多的仿人机器人中,NAO 机器人以其独特的魅力和强大的功能脱颖而出。
NAO 机器人是由法国 Aldebaran Robotics 公司开发的一款具有高度智能化和交互性的仿人机器人。
它的外形小巧可爱,身高约 58 厘米,体重约 5 公斤,拥有一双灵动的眼睛和丰富的表情,能够与人进行亲切而自然的交流。
NAO 机器人配备了多种先进的传感器,包括摄像头、麦克风、超声波传感器等,这些传感器使得它能够感知周围的环境和人类的行为。
通过摄像头,NAO 机器人可以识别面部表情、手势和物体;麦克风则让它能够接收和理解人类的语言指令;超声波传感器帮助它检测周围的障碍物,避免碰撞。
在运动能力方面,NAO 机器人具有出色的灵活性和协调性。
它可以行走、跑步、跳舞、甚至能够完成一些复杂的动作,如踢足球、打太极等。
其关节的设计和驱动系统使得动作流畅自然,仿佛一个真正的人类在活动。
NAO 机器人的软件系统也非常强大。
它运行着一套专门开发的操作系统,支持多种编程语言和开发工具,方便开发者为其编写各种应用程序。
同时,它还具备自主学习和适应环境的能力,能够根据不同的任务和场景,调整自己的行为和策略。
在教育领域,NAO 机器人发挥着重要的作用。
它可以作为教学助手,帮助教师进行课堂教学。
例如,在数学课堂上,NAO 机器人可以通过生动有趣的方式展示数学概念和解题过程;在语言学习中,它能够与学生进行对话练习,纠正发音和语法错误。
此外,NAO 机器人还可以激发学生对科学技术的兴趣,培养他们的创新思维和实践能力。
在医疗领域,NAO 机器人也有着广阔的应用前景。
它可以作为康复辅助工具,帮助患者进行康复训练。
对于患有自闭症、老年痴呆等疾病的患者,NAO 机器人可以陪伴他们,提供情感支持和心理疏导。
在科研领域,NAO 机器人为研究人员提供了一个理想的实验平台。
Nao机器人中文说明

3、电池与设备器
Nao 电池 1300 mAH Nao 充电器
Ref NA20CHA1
塔米智能科技(北京)有限公司 电话:+86-10-82609889 传真:+86-10-82609004 地址:北京市海淀区苏州街 16 号神州数码大厦 1607 室 邮编:100080
环境互动工具
Infrared
编程能力 Nao拥有一个开放的编程构架,所以不同的软件模块可以和谐的方式相互作用。 不管使用者的专业水平如何,都完全能用我们的图像编程平台Choregraphe®\u26469X 为Nao编制程序,以使用C++语言创造或编辑它的行为。最高级的操作人员还可 以通过一个非常丰富的应用程序接口使用各种脚本语言来为Nao编程。 依靠这个高级的应用程序接口,使用者可以创造Nao的移动动作并控制它的平 衡。更专业的使用者还可打开一个低水平的传感器与驱动器编写程序,如果愿 意并可用他们自己的编码替换我们的编码。 最后,在使动作序列生效时,Choregraphe 也适用于微软 Robotics Studio 和 Cyberbotics Webots 模拟器。
高性能的两足机器人
Nao, 是一个高 58 公分的机器人,是Aldebaran RoboticsTM 公司花费了三年时间的 研究成果。它是各种硬件和软件以独特的方式组装成的一种产品,并有着讨人 喜欢的外形设计。它可在 Linux、微软或 MacOS 等多种平台上编程,全部借 助最新技术设计,所以动作连贯并带有品种多样的传感器。
主板:
-x86 AMD GEODE 500MHZ CPU
-256 MB SDRAM/1GB 闪存
嵌入式软件:
OS:
嵌入式 Linux(32bit * 86 ELF)
NAO机器人技术参数
NAO技术参数NAO技术参数1. 外观设计- 尺寸:高度、宽度、深度- 重量:单位为千克- 外壳材料:描述外部的材料2. 层级结构- 头部- 摄像头:分辨率、视角、帧速率等参数- 陀螺仪:描述陀螺仪技术参数- 头部关节:描述关节数量和类型- 躯干- 身体关节:描述关节数量和类型- 传感器:描述躯干部分的其他传感器,如触摸传感器、惯性传感器等- 手臂- 关节:描述每个手臂的关节数量和类型- 末端执行器:描述手臂末端执行器的类型- 腿部- 关节:描述每条腿的关节数量和类型- 步行模式:描述行走的模式,如两条腿的行走模式或者四条腿的行走模式- 电源和充电- 电池:描述电池容量和类型- 充电时间:描述充电所需的时间3. 感知和交互能力- 语音识别:描述接收和解析语音的技术- 语音合成:描述语音的技术- 视觉识别:描述通过摄像头获取和解析视觉信息的技术- 触觉传感器:描述的触摸传感器技术- 环境感知:描述识别和理解周围环境的能力- 用户交互:描述与用户进行交互的技术和接口4. 软件和编程接口- 操作系统:描述所使用的操作系统- 编程语言:描述的编程语言和开发环境- 开发工具:描述的开发工具和 SDK- 数据库:描述所使用的数据库技术5. 安全性和隐私保护- 安全机制:描述的安全功能和保护机制- 隐私保护:描述如何处理用户数据和保护用户隐私6. 附件- 附件1:相关文档或资料的名称和描述- 附件2:相关图片或示意图的名称和描述法律名词及注释:- 版权:指作为知识产权的一种,保护原创作品的权益。
- 商标:用于区分商品或服务的标识,受到法律保护。
- 隐私权:个人对其个人信息的保护权利。
Nao机器人中文说明
Nao中文说明Nao中文说明一、介绍Nao是一款智能人形,具备语音识别、人脸识别、动作控制等多项功能。
本文档将详细介绍Nao的各项特性和使用方法。
二、外观和部件1、外观:Nao外观呈人形设计,身高约为58厘米。
2、部件:a:头部:包括眼睛、嘴巴、耳朵等感知器官。
b:上半身:包括肩膀、手臂、胸部等机械结构。
c:下半身:包括大腿、小腿、足部等机械结构。
d:传感器:包括摄像头、触摸传感器、陀螺仪等。
三、基本功能1、语音识别:Nao能够识别用户的语音指令,并作出相应的回应。
2、人脸识别:Nao能够识别用户的面部特征,并调整表情和姿势作出互动。
3、动作控制:Nao能够执行各种动作,如走路、跳舞等。
4、知识问答:Nao具备基础的功能,可以回答一些简单的问题。
四、使用方法1、连接电源:将Nao插入电源适配器,并将适配器连接至电源插座。
2、启动:按下上方的电源按钮,并等待系统启动完成。
3、连接网络:通过无线网络或以太网线将Nao连接至互联网。
4、语音控制:对Nao说出指令,例如“你好Nao”来唤醒,并开始对话。
5、人脸识别:通过Nao的摄像头,让识别用户的面部特征,并与用户互动。
五、注意事项1、使用环境:Nao适用于室内使用,避免放置在有水和明火的地方。
2、动作控制:在执行动作时,确保周围没有障碍物,以免受阻。
3、更新固件:定期检查并更新Nao的固件,以获得最新的功能和修复。
六、常见问题解答1、Q: Nao如何与其他设备连接?A: Nao可以通过无线网络或以太网线连接至其他设备,例如智能方式或电脑。
2、Q: 我可以为Nao定制新的动作吗?A: 是的,Nao支持用户自定义动作,您可以使用开发工具包进行编程。
3、Q: Nao的电池续航时间是多久?A: Nao的电池续航时间约为2小时,具体取决于使用情况和功能需求。
附件:本文档附带Nao用户手册和软件安装指南。
法律名词及注释:1、:根据概念塑造的机电一体化装置,能够自动执行各种任务的设备。
NAO

NAO机器人介绍NAO是一个57厘米高的可编程仿人机器人。
其关键组件如下:·拥有25个自由度(DOF)的身体,其关键部件为电机与致动器。
·一系列传感器:2个高清摄像头、4个麦克风、两组超声波距离传感器、2个红外线发射器和接收器、1组惯性传感单元(两个陀螺仪,一个加速计)、9个触觉传感器及8个压力传感器。
·用于自我表达的器件:语音合成器、LED灯及2个高品质扬声器。
·一个CPU(ATOM Z530),1.6G主频,1G RAM,2Gflash,8Gmicro SDHC。
·第二个CPU(ARM 9),用以处理所有传感器数据。
·一个1.28Ah电池,根据使用方式的不同,可为NAO提供1.5小时、甚至更长的自主时间。
构建机器人的应用程序具有挑战性:应用程序建立在大量先进的复杂技术之上,如语音识别、物体识别、地图构建等。
应用程序必须安全可靠,而且能够利用有限的资源、在有限的环境中运行。
NAO支持用户可在Windows、Mac或Linux系统下开发代码,并通过C++、Python、Urbi、.Net 等多种语言进行调用。
建立在该框架之上的模块提供丰富的API接口,以便与NAO互动。
可满足一般机器人开发的需要:并行,资源,同步,事件。
运动全方位行走NAO行走使用的是一个简单动态模型(线性倒摆,LIPM)及二次规划(Quadratic programming)。
NAO使用关节传感器提供的反馈信息,来完成行走平衡。
这样,既可提高机器人行走的鲁棒性,免受小的干扰,也可吸收躯干在前面和侧面的振荡。
此外,NAO还可在多种地面上行走,如地毯、瓷砖地、木质地板等,并可从一种地面自如地行走至另一种地面。
全身运动NAO的运动模型基于一个普遍的逆运动学(Generalized Inverse Kinematics),可处理笛卡尔和关节控制、平衡、冗余和任务优先级等。
换言之,当要求NAO伸出手臂时,它会同时弯下躯干。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NAO机器人参数
应用领域:
机器视觉音频处理模式识别定位与导航运动控制智能系统控制信息融合脑-机接口人工智能智能机器人机器学习多智能体人机交互自闭症物联网机器人比赛机电一体化教育展示公关
关键特性:
1、通用仿人机器人:
内置英特尔ATOM处理器、动作更流畅、语音和视觉性能显著提升
2、强大的视觉与音频处理能力:
a) 摄像头:
摄像头传感器可提供灵敏度更高的VGA格式画面,微光光感更出色。
高清分辨率下可达到30幅画面的处理速度。
水平方向转动头部239度,垂直转动68度。
视角范围水平61度,垂直47度。
b) 物体识别:
可识别大量物体,并通过Choregraphe软件保存物体信息。
当再次看到已保存物体时,自动进行识别并说出名称。
c) 面部探测与识别:
这是最广为人知的一项互动功能。
NAO可探测并学习记忆不同面部,并对其识别。
d) 声音合成:
NAO会说九种语言。
在Choreghraphe软件中的“Say”命令盒中,可插入文字,调整声音参数。
随后,NAO就会以恰当的语调说出这段文字。
e) 自动语音识别:
语音识别是人类与机器人互动的核心元素。
NAO可在2米范围内听到您说话,并能听懂一整句话或关键词汇。
f) 声音探测与定位:
NAO可借助头部的4个麦克风,像人类一样探测到周围环境中的声音,并进行声源定位。
3、生动自然的动作反射:
a) 智能刚度:
根据实际情况,NAO可自动调节电机耗电量。
更有效使用驱动器组件,也可节约电池。
b) 摔倒管理器:
摔倒探测系统,帮助NAO在倒地之前,用手臂进行自我保护,并且学会了如何自己站起来。
c) 防自撞:
36个传感器可防止NAO的手臂碰撞到身体的其他部位。
他始终知道自己的头部、躯干、双腿和双臂的位置。
d) 资源管理器:
NAO能够合并、调整相互矛盾的命令。
能中断、停止或调整正在执行中的行为,之后,再挂靠新的行为命令。
硬件参数
主板:
CPU:英特尔ATOM Z530 1.6GHz ,内存1GB,闪存2GB,扩展内存8GB
音频:
扬声器:侧面2个2W(阻抗8欧姆)麦克风:头部4个,灵敏度40dB
红外:
前额2个,发射角度+/-60度,波长940nm
电源:
输入:100-240V,50/60Hz
锂电池:21.6V/1.28Ah,27.6Wh,正常使用90分钟,活跃使用60分钟
语言:
语音合成:英语,法语,西班牙语,德语,意大利语,中文,日语,韩语,葡萄牙语
自动语音识别:英语,法语,西班牙语,德语,意大利语,中文,日语,韩语
视觉:
摄像头:前额2个,最大分辨率1288*968,
帧率:千兆网内640*480分辨率30帧,百兆12帧。
320*240分辨率为30帧
声纳:
发射、接收各2个,探测范围0.25m-2.55M,探测角度60度,频率40KHz
接触传感器:
胸前按钮1个,足部碰撞传感器2个,头部触觉传感器3个,手部触觉传感器2个。
惯性传感器:
陀螺仪2个,加速计1个
位置传感器(MRE磁性编码器):36个
LEDS彩灯:
头部传感器12个,耳部20个16级蓝色
眼部16个,胸部按钮1个,足部2个RGB全彩
自由度(DOF):
头部2个,手臂10个,髋部1个,腿部10个,手部2个总计25个
电机:直流空心杯电机
头部2个,手臂关节6个,腿部关节6个
规格:
高度58cm,重量5.2kg,工业塑料
联接类型:无线网际网络(IEE 802.11g) 和以太网端口
软件:嵌入式GNU/Linux 编程环境:C++/Python/.NET/Java/MatLab
硬件平台
NAO是一个57厘米高的可编程仿人机器人。
其关键组件如下:
· 身体拥有25个自由度(DOF),其关键部件为电机与制动器。
· 36个位置传感器,2个摄像头、4个麦克风、2个超声波距离传感器、2个红外线发射器和接收器、1个惯性板、9个触觉传感器及8个压力传感器。
· 用于自我表达的器件:语音合成器、LED灯及2个高品质扬声器。
· 一个CPU(位于机器人头部),运行一个Linux内核,并支持ALDEBARAN公司自行研制的专有中间件(NAOqi)。
· 第二个CPU(位于机器人躯干内)。
· 一个55瓦时电池,根据使用方式的不同,可为NAO提供1.5小时、甚至更长的自主时间。