matlab与优化设计
完整版优化设计Matlab编程作业
化设计hl4HU©0⑥ 3 hlu 凹内r d X1州fci-rU-fFF卢F ♦ 忡下¥为+1 —*— S-ll-« F41:Si —MATLABoftiHMirjirCfiffliiiiJ PHI■1**■ 温不平?」11,・—喜M - 〜FT 文词一时y 片 34ml 3F*L9TR0i. Jill!-LkftLgWf 1S1CSI掰f 1 ■ >A A A »W I % :k Dnfl w I ■ J k^lXMprfaMk tjn nn Alflhw初选 x0=[1,1] 程序:Step 1: Write an Mfle objfunl.m.function f1=objfun1(x)f1=x(1)人2+2*x(2)入2-2*x(1)*x(2)-4*x(1);Step 2: Invoke one of the unconstrained optimization routinesx0=[1,1];>> options = 0Ptimset('LargeScale','off);>> [x,fval,exitflag,output] = fminunc(@objfun1,x0,options)运行结果: x =4.0000 2.0000 fval = -8.0000exitflag =1 output = iterations: 3 funcCount: 12 stepsize: 1 firstorderopt: 2.3842e-007algorithm: 'medium-scale: Quasi-Newton line search message: [1x85 char]非线性有约束优化1. Min f(x)=3 x : + x 2+2 x 1-3 x 2+5 Subject to:g 2(x)=5 X 1-3 X 2 -25 < 0 g (x)=13 X -41 X 2 < 0 3 12g 4(x)=14 < X 1 < 130无约束优化 min f(x)=X 2 + x 2-2 x 1 x 2-4 x 1g5 (x)=2 < X 2 < 57初选x0=[10,10]Step 1: Write an M-file objfun2.mfunction f2=objfun2(x)f2=3*x(1)人2+x(2)人2+2*x(1)-3*x(2)+5;Step 2: Write an M-file confunl.m for the constraints. function [c,ceq]=confun1(x) % Nonlinear inequality constraints c=[x(1)+x(2)+18;5*x(1)-3*x(2)-25;13*x(1)-41*x(2)人2;14-x(1);x(1)-130;2-x(2);x(2)-57];% Nonlinear inequality constraints ceq=[];Step 3: Invoke constrained optimization routinex0=[10,10]; % Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun2,x0,[],[],[],[],[],[],@confun1,options)运行结果:x =3.6755 -7.0744 fval =124.14952.min f (x) =4x2 + 5x2s.t. g 1(x) = 2X] + 3x2- 6 < 0g (x) = x x +1 > 0初选x0=[1,1]Step 1: Write an M-file objfun3.m function f=objfun3(x) f=4*x(1)人2 + 5*x(2)人2Step 2: Write an M-file confun3.m for the constraints. function [c,ceq]=confun3(x) %Nonlinear inequality constraints c=[2*x(1)+3*x(2)-6;-x(1)*x(2)-1];% Nonlinear equality constraints ceq口;Step 3: Invoke constrained optimization routinex0=[1,1];% Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun,x0,[],[],[],[],[],[],@confun,options)运行结果:Optimization terminated: no feasible solution found. Magnitude of search direction less than2*options.TolX but constraints are not satisfied.x =11fval =-13实例:螺栓连接的优化设计图示为一压气机气缸与缸盖连接的示意图。
MATLAB实验遗传算法与优化设计(可编辑)
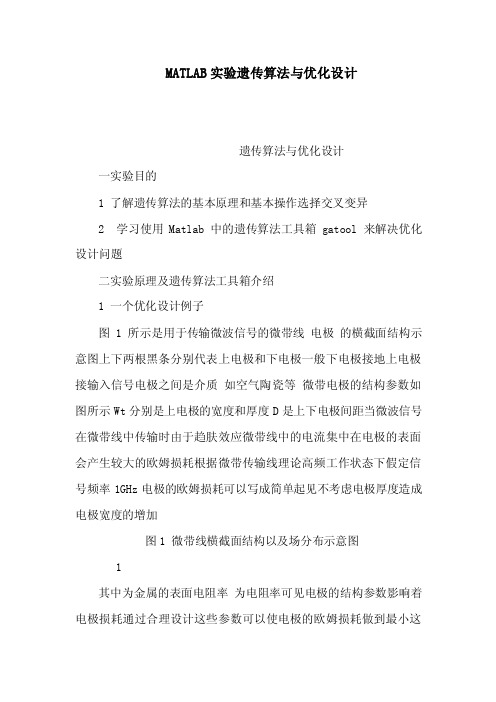
MATLAB实验遗传算法与优化设计遗传算法与优化设计一实验目的1 了解遗传算法的基本原理和基本操作选择交叉变异2 学习使用Matlab中的遗传算法工具箱 gatool 来解决优化设计问题二实验原理及遗传算法工具箱介绍1 一个优化设计例子图1所示是用于传输微波信号的微带线电极的横截面结构示意图上下两根黑条分别代表上电极和下电极一般下电极接地上电极接输入信号电极之间是介质如空气陶瓷等微带电极的结构参数如图所示Wt分别是上电极的宽度和厚度D是上下电极间距当微波信号在微带线中传输时由于趋肤效应微带线中的电流集中在电极的表面会产生较大的欧姆损耗根据微带传输线理论高频工作状态下假定信号频率1GHz电极的欧姆损耗可以写成简单起见不考虑电极厚度造成电极宽度的增加图1 微带线横截面结构以及场分布示意图1其中为金属的表面电阻率为电阻率可见电极的结构参数影响着电极损耗通过合理设计这些参数可以使电极的欧姆损耗做到最小这就是所谓的最优化问题或者称为规划设计问题此处设计变量有3个WDt它们组成决策向量[W D t] T待优化函数称为目标函数上述优化设计问题可以抽象为数学描述2其中是决策向量x1xn为n个设计变量这是一个单目标的数学规划问题在一组针对决策变量的约束条件下使目标函数最小化有时也可能是最大化此时在目标函数前添个负号即可满足约束条件的解X 称为可行解所有满足条件的X组成问题的可行解空间2 遗传算法基本原理和基本操作遗传算法 Genetic Algorithm GA 是一种非常实用高效鲁棒性强的优化技术广泛应用于工程技术的各个领域如函数优化机器学习图像处理生产调度等遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化算法按照达尔文的进化论生物在进化过程中物竞天择对自然环境适应度高的物种被保留下来适应度差的物种而被淘汰物种通过遗传将这些好的性状复制给下一代同时也通过种间的交配交叉和变异不断产生新的物种以适应环境的变化从总体水平上看生物在进化过程中子代总要比其父代优良因此生物的进化过程其实就是一个不断产生优良物种的过程这和优化设计问题具有惊人的相似性从而使得生物的遗传和进化能够被用于实际的优化设计问题按照生物学知识遗传信息基因Gene 的载体是染色体Chromosome 染色体中一定数量的基因按照一定的规律排列即编码遗传基因在染色体中的排列位置称为基因座Locus在同一个基因座上所有可能的基因就称为等位基因Allele生物所持有的基因以及基因的构成形式称为生物的基因型Genotype而该生物在环境中所呈现的相应性状称为该生物的表现型Phenotype在遗传过程中染色体上的基因能够直接复制给子代从而使得子代具有亲代的特征此外两条染色体之间也通过交叉 Crossover 而重组即两个染色体在某个相同的位置处被截断其前后两串基因交叉组合而形成两个新的染色体在基因复制时也会产生微小的变异Mutation从而也产生了新的染色体因此交叉和变异是产生新物种的主要途径由于自然选择在子代群体新产生的物种或染色体当中只有那些对环境适应度高的才能生存下来即适应度越高的被选择的概率也越大然后又是通过遗传和变异再自然选择一代一代不断进化因此生物遗传和进化的基本过程就是选择即复制交叉和变异遗传算法就是通过模拟生物进化的这几个基本过程而实现的①编码编码是设计遗传算法首要解决的问题在生物进化中选择交叉变异这些基本过程都是基于遗传信息的编码方式进行的即基于染色体的基因型而非表现型因此要模拟生物进化过程遗传算法必须首先对问题的可行解X决策向量进行某种编码以便借鉴生物学中染色体和基因等概念在遗传算法中将每一个决策向量X用一个染色体V来表示3其中每一个vi代表一个基因染色体的长度m不一定等于设计变量的数目n取决于染色体上基因的编码方式一般有两种编码方式二进制编码和浮点数编码如果是二进制编码每一个设计变量xi的真实值用一串二进制符号0和1按照一定的编码规则来表示每个二进制符号就代表一个基因因此染色体长度要远大于设计变量的数目这种由二进制编码构成的排列形式V就是染色体也称个体的基因型而基因型经过解码后所对应的决策向量X即可行解就是个体的表现型如果是浮点数编码每个设计变量用其取值范围内的一个浮点数表示构成染色体的一个基因vi因此个体的编码长度m也就等于决策变量的个数n由于这种编码方式使用的是决策变量的真实值所以也称真值编码方法无论哪种编码方式所有可能的染色体个体V构成问题的搜索空间种群遗传算法对最优解的搜索就是在搜索空间中搜索适应度最高的染色体后面叙述适应度的计算因此通过编码将一个问题的可行解从其解空间转换到了遗传算法能够处理的搜索空间经过个体的编码后就可以进行遗传算法的基本操作选择交叉和变异②选择复制操作选择也就是复制是在群体中选择适应度高的个体产生新群体的过程生物的进化是以集团为主体的与此相应遗传算法的运算对象是有M个个体或染色体组成的集合称为种群M也称为种群规模遗传算法在模拟自然选择时以个体的适应度Fitness高低为选择依据即适应度高的个体被遗传到下一代种群的概率较高而适应度低的个体遗传到下一代的概率则相对较低个体适应度由适应度函数计算适应度函数总是和个体表现型 ie X 的目标函数值f X 关联一般是由目标函数经过一定的变换得到一种最简单的方法就是直接使用目标函数f X 作为适应度函数4选定了适应度函数之后个体适应度也随之确定则在选择操作时个体被选中的概率5其中Fi为个体的适应度这种选择方式称为比例选择也称轮盘赌选择除此之外还有多种选择方法如随机竞争选择均匀选择无回放随机选择等不一一介绍③交叉操作所谓交叉就是以一定的概率交叉概率从群体中选择两个个体染色体按照某种方式交换其部分基因从而形成两个新的个体在遗传算法中它是产生新个体同时也是获得新的优良个体的主要方法它决定了遗传算法的全局搜索能力对于不同的编码方式交叉操作的具体方法也不相同对于浮点数编码一般使用算术交叉对于二进制编码有单点交叉和多点交叉等方式不论何种方式在交叉操作时首先应定义交叉概率Pc这个概率表明种群中参与交叉的个体数目的期望值是M 是种群规模通常交叉概率应取较大的值以便产生较多的新个体增加全局搜索力度但是Pc过大时优良个体被破坏的可能性也越大如果Pc 太小则搜索进程变慢影响算法的运行效率一般建议的取值范围是04–099④变异操作遗传算法中的变异操作就是将染色体上某些基因座上的基因以一定的变异概率Pm用其他的等位基因替代从而形成新的个体对于浮点数编码变异操作就是将变异点处的基因用该基因取值范围内的一个随机数替换对于二进制编码则是将变异点处的基因由1变成00变成1变异操作也有多种方法如均匀变异非均匀变异高斯变异等变异操作的概率Pm要比交叉操作的概率Pc小得多变异只是产生新个体的辅助手段但它是遗传算法必不可少的一个环节因为变异操作决定了算法的局部搜索能力它弥补了交叉操作无法对搜索空间的细节进行局部搜索的不足因此交叉和变异操作相互配合共同完成对搜索空间的全局和局部搜索以上简要介绍了遗传算法的基本原理和操作归纳起来基本遗传算法一般可以表示为一个8元组6式中C 个体的编码方法E 个体适应度评价函数P0 初始种群M 种群规模选择操作交叉操作变异操作是进化终止代数进化终止条件其中有4个运行参数需要预先设定M T PcPm 种群规模M一般取为20100 终止代数T一般取100500交叉概率Pc一般取04099 变异概率Pm一般取0000101最后给出遗传算法的基本步骤①选择二进制编码或浮点数编码把问题的解表示成染色体②随机产生一群染色体个体也就是初始种群③计算每一个个体的适应度值按适者生存的原则从中选择出适应度较大的染色体进行复制再通过交叉变异过程产生更适应环境的新一代染色体群即子代④重复第3步经过这样的一代一代地进化最后就会收敛到最适应环境适应度最大的一个染色体即个体上它就是问题的最优解图2给出了基本遗传算法设计流程图其中t代表当前代数T是进化终止代数图2 基本遗传算法设计流程图3 Matlab遗传算法工具箱 gatoolMatlab的遗传算法工具箱有一个精心设计的图形用户界面可以帮助用户直观方便快速地利用遗传算法求解最优化问题在Matlab命令窗口输入命令gatool可以打开遗传算法工具箱的图形用户界面如图3所示GA工具箱的参数设置步骤如下图3 遗传算法工具1 首先使用遗传算法工具箱必须输入下列信息Fitness function 适应度函数这里指的是待优化的函数也即目标函数该工具箱总是试图寻找目标函数的最小值输入适应度函数的格式为fitnessfun其中符号产生函数fitnessfun的句柄fitnessfun代表用户编写的计算适应度函数目标函数的M文件名该M文件的编写方法如下假定我们要计算Rastrigin函数的最小值7M函数文件确定这个函数必须接受一个长度为2的行向量X也即决策向量向量的长度等于变量数目行向量X的每个元素分别和变量x1和x2对应另外M文件要返回一个标量Z其值等于该函数的值下面是计算Rastrigin函数的M文件代码function Z Ras_fun XZ 20X 1 2X 2 2-10 cos 2piX 1 cos 2piX 2M文件编写保存后再在gatool工具箱界面Fitness function栏输入 Ras_funNumber of variable 变量个数目标函数中的变量数目也即适应度函数输入向量的长度在上例中它的值是22 其次设置遗传算法参数即Options设置以下只介绍部分运行参数的设置其他未提及的参数采用默认设置即可①种群参数 PopulationPopulation size 种群规模每一代中的个体数目一般是20-100之间种群规模大算法搜索更彻底可以增加算法搜索全局最优而非局部最优的概率但是耗时也更长Initial range 初始范围其值是两行的矩阵代表初始种群中个体的搜索范围实际上是决策向量X中每个变量xi的初始搜索范围矩阵的列数等于变量个数Number of variable第一行是每个变量的下限第二行是每个变量的上限如果只输入2 1的矩阵则每个变量的初始搜索范围都一样注意初始范围仅限定初始种群中个体或决策向量的范围后续各代中的个体可以不在初始范围之内初始范围不能设置太小否则造成个体之间的差异过小即种群的多样性降低不利于算法搜索到最优解②复制参数 ReproductionCrossover fraction 交叉概率一般取04099默认08③算法终止准则 Stopping Criteria提供了5种算法终止条件Generations最大的进化代数一般取100500默认是100当遗传算法运行到该参数指定的世代计算终止Time limit指明算法终止执行前的最大时间单位是秒缺省是Inf 无穷大Fitness limit 适应度限当最优适应度值小于或等于此参数值时计算终止缺省是-InfStall generation 停滞代数如果每一代的最佳适应度值在该参数指定的代数没有改善则终止计算缺省是50代Stall time 停滞时间如果每一代的最佳适应度值在该参数指定的时间间隔内没有改善则终止计算缺省是20秒3 设置绘图参数即Plots设置绘图参数Plots工作时可以从遗传算法得到图形数据当选择各种绘图参数并执行遗传算法时一个图形窗口在分离轴上显示这些图形下面介绍其中2个参数Best fitness 选择该绘图参数时将绘制每一代的最佳适应度值和进化世代数之间的关系图如图4的上图所示图中蓝色点代表每一代适应度函数的平均值黑色点代表每一代的最佳值Distance 选择此参数时绘制每一代中个体间的平均距离它反映个体之间的差异程度所以可用来衡量种群的多样性图4的下图显示的即是每一代个体间的平均距离图44 执行算法参数设置好了之后点击工具箱界面上的按钮Star 执行求解器在算法运行的同时Current generation当前代数文本框中显示当前的进化代数通过单击Pause按钮可以使计算暂停之后再点击Resume可以恢复计算当计算完成时Status and results窗格中出现如图5所示的情形图5其中包含下列信息算法终止时适应度函数的最终值即目标函数的最优值Fitness function value 0003909079476983379算法终止原因Optimization terminated imum number of generations exceeded 超出最大进化世代数最终点即目标函数的最优解[x1 x2] [-0004 -000193]两个变量的例子三实验内容1 Rastrigin函数的最小值问题函数表达式如 7 式函数图像如下图6所示它有多个局部极小值但是只有一个全局最小值Rastrigin函数的全局最小值的精确解是0出现在[x1 x2] [0 0]处图6 Rastrigin函数图像使用遗传算法工具箱近似求解Rastrigin函数的最小值首先编写计算适应度函数的M文件然后设置运行参数绘图参数Plots勾选Best fitness和Distance两项其它参数可以使用默认值执行求解器Run solver计算Rastrigin函数的最优值观察种群多样性对优化结果的影响决定遗传算法的一个重要性能是种群的多样性个体之间的距离越大则多样性越高反之则多样性越低多样性过高或过低遗传算法都可能运行不好通过实验调整Population 种群的Initial range 初始范围参数可得到种群适当的多样性取Initial range参数值[1 11]观察Rastrigin函数最小值的计算结果取Initial range参数值[1 100]观察Rastrigin函数最小值的计算结果取Initial range参数值[1 2]观察Rastrigin函数最小值的计算结果2 微带电极欧姆损耗的优化微带电极的欧姆损耗公式可由 1 式表示令设计变量[WDt] [x1 x2 x3] X变量的约束条件如下8根据 1 式和 8 式使用遗产算法工具箱优化设计电极的结构参数W 宽度 D 间距 t 厚度使得电极的欧姆损耗最小 1 式中用到的常数提示对约束条件 8 式的处理可以在编写计算适应度函数的M文件中实现方法是在M文件中引入对每个输入变量值范围的判断语句如果任一变量范围超出 8 式的限制则给该个体的适应度施加一个惩罚使得该个体被遗传到下一代的概率减小甚至为0一般可用下式对个体适应度进行调整9其中F x 是原适应度F x 是调整后的适应度P x 是罚函数为简单计本问题中我们可以给个体的适应度 com件的返回值Z 加上一个很大的数即可如正无穷Inf四思考题1 在遗传算法当中个体的变异对结果有何影响如果没有变异结果又将如何试以Rastrigin函数最小值的计算为例说明取变异概率为0即交叉概率Crossover fraction 102 遗传算法工具箱针对的是最小化函数值问题如果要利用该工具箱计算函数的最大值该如何实现。
基于MATLAB的优化设计中可视化方法的研究
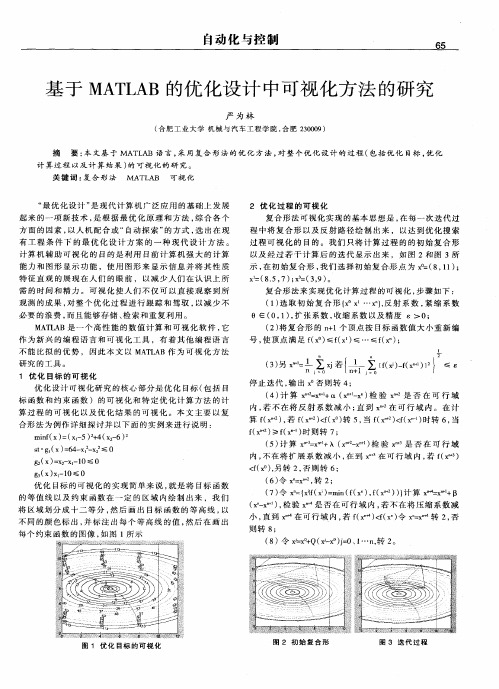
2 优 化 过 程 的 可 视 化
复合 形 法 可视 化 实 现 的基本 思 想 是 , 每一 次 迭代 过 在 程 中将 复 合形 以及 反 射 路 径 绘 制 出来 ,以达 到 优化 搜 索
过 程 可 视化 的 目的 。我 们 只将 计 算 过 程 的的初 始 复合 形
则 转 8 ; ( 8)令 x x J %Q(j 。 0、 … n转 2 = x X) — 1 , 。
不 同 的颜 色 标 出 , 并标 注 出每 个 等 高 线 的值 , 后 在 画 出 然 每个 约 束 函数 的 图像 , 图 1 示 如 所
m n( ) ( l5 4 x 6 ifX = X )+ ( 2 ) - - s・ lx = 4 x一 2 0 tg( ) 6 一 l X ≤ 2 g( ) X x 0 0 2 X -2 广1 ≤ 一
g( X- 0≤ 0 3 x) 11
( 计 算 x-X ( m-n ) 验 x 是 否 在 可 行 域 5) r ̄ + x xt 检 r 3 + m 内, 不在 将 扩 展 系数 减 小 , 到 ) 在可 行 域 内 , fx 在 【 I . 若 (m)
( ) 复 合形 的 n 1个顶 点 按 目标 函 数值 大 小重 新 编 2将 +
号 , 顶 点 满 足 fX ) ( - ≤ … ≤ fX) 使 (o ≤f X) (n :
上
n , n 、 2
1 优 化 目标 的 可 视 化
(另 } x { .[ _叶 ≤ 3 , j f f } s ) 若 (( x
停止 迭 代 , 出 x 否 则 转 4; 输 o ( ) 算 X 2X (n_ n 检 验 x 是 否 在 可 行 域 4计 nD + x+ x) +  ̄ I m 内 , 不 在 将 反 射 系 数 减 小 ; 到 x 在 可行 域 内 。 在 计 若 直 算 fx , fx < (0 转 5 当 f x (( ) ( ) 若 ( ) fX ) , ( m)f X 时转 6, 当
MATLAB优化的设计实验课件.ppt

例如: x=[1 2 3 4 5 6 7 8 9 0] y=[1,2,3,4,5,6,7,8,9,0] z=[1,2,3,4,5;2,3,4,5,6,7]
2021/3/3
1.2.2数组
例如:a = 1:2:15 则:
a(2) a(3:5) a(5:-1:2) a([2,6,8])
1 3 5 7 a的值 9 11 13 15
2021/3/3
1.2.3 数组运算
1、数组的基本运算 设有数组a 1 n ,b 1 n ,x 1 m ,g m n ,h n m ,fm n 变量或常量c1,c2,..c.k
2021/3/3
1.2.2数组
2)域表定义数组 变量=初值:增量:终值|初值:终值 变量=(初值:增量:终值)*常数 例如: x=0:0.02:10 y=1:80 z=(1:0.1:7)*10e-5
2021/3/3
1.2.2数组
3)利用函数定义数组 变量=linspace(初值,终值,元素个数)
如:x = linspace(0,pi,11) 的结果为:
x= Columns 1 through 4
0 0.3142 0.6283 0.9425 Columns 5 through 8
1.2566 1.5708 1.8850 2.1991 Columns 9 through 11
2.5133 2.8274 3.1416
2021/3/3
1.1 MATLAB窗口
2、Workspace(工作区) 程序运行中的自定义变量和默认变量都包含在工作
优化设计-Matlab优化工具箱的介绍及8种函数的使用方法
计算结果 截面高度h x(1)=192.9958mm 斜边夹角θ x(2)=60.0005度 截面周长s f=668.5656mm
[x,fval,exitflag,output,grad,hessian]=fminbnd(@fun,x0,options,P1
3.例题:
3.2.3函数fminunc
解:(1)建立优化设计数学模型 (2)编写求解无约束非线性优化问题的M文件
2 优化工具箱 (Optimization Toolbox)
• 优化工具箱主要应用 ①求解无约束条件非线性极小值; ②求解约束条件下非线性极小值,包括目标 逼近问题、极大-极小值问题; ③求解二次规划和线性规划问题; ④非线性最小二乘逼近和曲线拟合; ⑤求解复杂结构的大规模优化问题。
• 优化工具箱的常用函数
初始点
各分目标期望值 各分目标权重 线性不等式约束的常数向量 线性不等式约束的系数矩阵 设置优化选项参数 非线性约束条件的函数名 设计变量的下界和上界 线性等式约束的常数向量 线性等式约束的系数矩阵
目标函数在最优解的海色矩阵
无定义时以空矩阵 符号“[ ]”代替
三、例题
3.5.1 函数fgoalattain
x1
x2
3.例题:
64516 2x 1 解:(1)建立优化设计数学模型 f ( X) x1 x1ctgx 2 sin x 2
使用Matlab进行电力系统分析和优化设计
使用Matlab进行电力系统分析和优化设计概述电力系统是现代社会运行的关键基础设施,对于电网的设计和运行进行分析和优化是保障电力供应的重要任务。
Matlab作为一种功能强大的工具和编程语言,被广泛应用于电力系统领域,能够提供一系列用于电力系统分析和优化设计的工具和函数。
1. 电力系统建模电力系统建模是进行电力系统分析和优化设计的基础。
在Matlab中,可以使用不同的方式进行电力系统建模,如节点模型、分支模型和网络模型。
节点模型是通过对电力系统网络进行节点和支路的描述,表示电力系统的拓扑和参数关系。
分支模型则是将电力系统分解为若干个支路,通过对每个分支进行建模计算。
网络模型则是将电力系统建模为一个整体,通过求解一组方程组来获得电力系统的节点电压和支路功率。
2. 电力系统分析电力系统分析是对电力系统运行状态和安全性进行评估和分析的过程。
在Matlab中,可以使用各种分析方法进行电力系统分析,例如潮流分析、短路分析、稳定性分析和谐波分析等。
潮流分析是用于求解电力系统的节点电压和支路功率分布的一种方法。
通过潮流分析,可以确定电力系统的潮流分布情况,找出潮流过载和电压偏差等问题,并提供相应的优化建议。
短路分析是用于评估电力系统在短路故障时的电流分布和保护措施的一种方法。
短路分析可以帮助确定电力系统的短路电流和设备额定电流的比较情况,从而评估电力系统的安全性和保护设备的合理性。
稳定性分析是用于评估电力系统在故障和变动负荷等情况下的稳定性和可靠性的一种方法。
通过稳定性分析,可以确定电力系统的动态响应和稳定裕度,提供相应的优化设计和控制建议。
谐波分析是用于评估电力系统中谐波电压和谐波电流的一种方法。
通过谐波分析,可以确定电力系统中谐波电压和谐波电流的谐波含量,找出谐波问题的根源,并提供相应的滤波器和接地措施。
3. 电力系统优化设计电力系统优化设计是在满足电力供应要求的前提下,通过合理配置和控制电力系统的各个元件,以提高系统的效率和可靠性。
机械优化设计MATLAB程序

机械优化设计MATLAB程序
1.建立目标函数和约束条件
在机械优化设计中,目标函数是需要最小化或最大化的量,可以是机械结构的重量、成本、应力等。
约束条件是指机械结构必须满足的条件,例如最大应力、最小挠度等。
在MATLAB中通过函数来定义目标函数和约束函数。
2.选择优化算法
MATLAB提供了多种优化算法,例如遗传算法、粒子群算法、模拟退火算法等。
根据实际情况选择合适的优化算法。
3.设计参数和变量范围
机械结构的优化设计通常涉及到多个参数和变量,如尺寸、材料等。
在MATLAB中通过定义参数和变量范围来限制优化过程中的空间。
4.编写优化程序
在MATLAB中,可以使用优化工具箱的相关函数来编写机械优化设计程序。
程序的基本结构包括定义目标函数、约束函数、参数和变量范围,并选择合适的优化算法进行求解。
5.运行优化程序
在编写完成程序后,可以通过运行程序来开始优化过程。
MATLAB会根据设定的目标函数和约束条件进行,并最终得到最优解。
6.分析优化结果
优化程序运行完成后,可以通过MATLAB提供的分析工具对优化结果进行评估。
可以通过绘制图表、计算相关指标等方式对结果进行分析和比较。
7.进一步优化和改进
根据优化结果,可以对机械结构进行进一步优化和改进。
可以调整参数和变量范围,重新运行优化程序,直到得到满意的结果。
总之,以上是一种用MATLAB编写机械优化设计程序的基本流程。
通过合理地利用MATLAB提供的工具和函数,可以帮助工程师进行机械结构的优化设计,提高设计效率和准确性。
机械优化设计MATLAB程序

机械优化设计MATLAB程序机械优化设计MATLAB程序引言机械优化设计是现代工程领域中的重要课题,通过采用数值方法和优化算法,可以实现对机械产品设计的自动化和优化。
MATLAB 作为一种功能强大的科学计算软件,为机械优化设计提供了丰富的工具和函数。
本文将介绍如何使用MATLAB编写机械优化设计程序,并讨论如何应用MATLAB进行机械优化设计。
MATLAB的优势与其他科学计算软件相比,MATLAB具有许多优势:1. 丰富的工具箱:MATLAB包含了各种各样的工具箱,涵盖了数值计算、优化、曲线拟合、数据可视化等领域,这些工具箱为机械优化设计提供了强大的支持。
2. 简单易用的编程语言:MATLAB使用的编程语言是一种高级语言,语法简单易懂,对于初学者而言非常友好。
即使没有编程经验,用户也能够快速上手。
3. 丰富的函数库:MATLAB拥有丰富的函数库,用户可以直接调用这些函数来完成各种任务,无需从零开始编写代码。
4. 广泛的应用领域:MATLAB在工程、科学、金融等领域得到了广泛的应用,拥有一个庞大的用户社区。
用户可以通过查看官方文档、参与用户社区等途径获取帮助和支持。
机械优化设计的步骤机械优化设计一般包括以下几个步骤:1. 建立数学模型:首先需要建立机械系统的数学模型,该模型可以基于物理原理或实验数据。
通过建立数学模型,可以将机械系统的性能指标与设计变量进行数学描述。
2. 确定优化目标:根据机械系统的需求和限制条件,确定优化目标。
优化目标可以是多个,如最小化能量损失、最小化材料使用量等。
3. 选择优化算法:基于问题的性质选择合适的优化算法。
常用的优化算法包括遗传算法、粒子群算法、梯度下降算法等。
4. 编写MATLAB代码:根据以上步骤,编写MATLAB代码实现机械优化设计。
MATLAB提供了丰富的工具箱和函数来辅助编写优化算法的代码。
编写机械优化设计MATLAB程序的步骤以下是编写机械优化设计MATLAB程序的一般步骤:1. 导入必要的工具箱和函数库:% 导入优化工具箱import optim.% 导入其他必要的函数库import matlab.2. 建立数学模型:根据机械系统的特点和要求,建立相应的数学模型。
matlab机械优化设计应用实例
一维优化问题
一维优化问题的数学模型为:
min
具体的调用格式如下: 调用格式1:
f ( x)
x1 x x2
在matlab中,一维优化问题,也就是一维搜索问题的实现是由函数fminbnd 来实现的。
调用方式二: 在命令窗口中输入: [x,fval]=fminsearch(@demfun1,[0,0]) 得到的结果 X= 1.0016 0.8335 Fval= -3.3241
约束优化问题
1.线性规划
f=[-7;-5]; A=[3,2;4,6;0,7]; b=[90;200;210]; lb=zeros(2,1); 调用linprog函数 [x,fval]=linprog(f,A,b,[],[],lb)
方法二:在MATLAB的M编辑器中建立函数文件用来保存所要 求解最小值的函数:
function f=demfun1(x) f= 2*x(1)^3+4*x(1)*x(2)^3-10*x(1)*x(2)+x(2)^2; 保存为demfun1.m。
然后,在命令窗口中调用该函数,这里有两种调用方式:
调用方式一: 在命令窗口中输入: [x,fval]=fminsearch('demfun1',[0,0])
调用格式2:[X,FVAL]=fminunc(FUN,X0) 这种格式的功能是:同时返回解x和在点x处的目标函数值。
1. 求函数F=sin(x)+3的最小值点。
function f=demfun(x) f=sin(x)+3 然后,在命令窗口中输入: X=fminunc(@demfun,2)
[精品]机械优化设计及其MATLAB实现
![[精品]机械优化设计及其MATLAB实现](https://img.taocdn.com/s3/m/e620f15c7ed5360cba1aa8114431b90d6c8589fe.png)
[精品]机械优化设计及其MATLAB实现
机械设计优化是一种在构建机械系统时,通过设计方法和技术,使机械系统具有最佳性能特征的一类工程问题。
它不仅要求机械系统要具备结构合理、可行性强和功能合理等可行性特征,而且要求满足系统的性能优化约束,以达到最佳的功能和性能。
为了解决机械设计优化类问题,许多算法已经得到广泛的应用,例如遗传算法、粒子群算法、陡峭穿越法以及模拟退火算法。
这些算法具有计算简单、收敛速度快以及优化效果好等特点,因此已经广泛应用于机械设计优化中。
同时,结合MATLAB等强大的数值计算软件,可以加速优化问题的计算,快速有效地解决问题。
根据机械设计优化的研究进程,MATLAB对于此类问题的解决有着重要的作用。
MATLAB 支持多种优化算法,具有函数极小化技术、计算机辅助优化设计(CAD)和遗传算法、模拟退火算法和粒子群等多种算法技术,可用于求解大多数机械设计优化问题。
此外,MATLAB还提供了丰富的可视化工具,使我们可以对平面或空间机械结构进行可视化监控,从而更好地理解机械系统的效果以及优化结果的合理性。
总之,MATLAB是一款功能强大的数值计算软件,它的强大功能可以帮助机械工程师解决机械设计优化类问题,提升设计效率和工作效果,因此成为机械设计优化领域中经久不衰的重要工具之一。
工程优化设计与matlab实现

The process of engineering optimization design entails a systematic approach to enhancing the performance of an engineering system through a variety of techniques and methodologies. This involves the identification of optimal design parameters that will result in a highly efficient, cost-effective, and dependable system. The utilization of mathematical models, simulation, and optimization algorithms is employed to thoroughly explore the design space and ascertain the most favorable solutions. The ultimate objective of engineering optimization design is to meet specified performance criteria while minimizing the resources and costs necessary to achieve said criteria.工程优化设计的过程要求采取系统的方法,通过各种技术和方法提高工程系统的性能。
这涉及确定最佳设计参数,从而建立一个高效、成本效益高和可靠的系统。
利用数学模型、模拟和优化算法来彻底探索设计空间并确定最有利的解决办法。
工程优化设计的最终目标是达到规定的性能标准,同时尽量减少实现上述标准所需的资源和费用。
matlab在机械优化设计中的应用

matlab在机械优化设计中的应用一、引言随着科技的不断发展,机械优化设计在工程领域中得到了广泛的应用。
而在机械优化设计中,matlab作为一款强大的数学软件,在优化算法的实现和结果分析等方面具有很大的优势。
本文将探讨matlab在机械优化设计中的应用。
二、matlab在机械优化设计中的基础知识1. matlab基础知识Matlab是一种交互式数值计算环境和编程语言,可用于科学计算、数据分析和可视化等多个领域。
Matlab有着丰富的函数库和工具箱,可进行各种数学运算、统计分析、图像处理、信号处理等操作。
2. 机械优化设计基础知识机械优化设计是指通过运用数学模型和计算方法对机械结构进行全面分析和综合考虑,以达到最佳性能指标或最小成本等目标。
其中包括了多目标规划、遗传算法、神经网络等多种方法。
三、matlab在机械优化设计中的应用1. 优化算法实现Matlab提供了各种常见的数值计算方法和最优化方法,如线性规划、非线性规划、遗传算法等。
通过Matlab的函数库和工具箱,可以轻松地实现各种优化算法,并且可以根据具体需求进行自定义编程。
2. 结果分析Matlab在结果分析方面也有很大的优势。
通过Matlab的图形界面,可以绘制各种图表,如散点图、折线图、柱状图等。
同时,Matlab还提供了多种统计分析方法,如方差分析、回归分析等,可以对优化结果进行全面的统计分析。
3. 机械结构设计Matlab还可以用于机械结构设计。
通过建立机械结构模型,并运用Matlab中的有限元分析工具箱进行模拟计算,可以得到机械结构在不同载荷下的应力和变形情况。
这些数据可以进一步用于优化设计和结构改进。
4. 案例应用以一台压缩机为例,利用Matlab进行机械优化设计。
首先建立压缩机的数学模型,并根据实际需求设置相关参数和目标函数。
然后采用遗传算法对压缩机进行优化设计,并得到最佳设计方案。
最后利用Matlab中的有限元分析工具箱对最佳设计方案进行模拟计算,并得到应力和变形等数据。
基于matlab的齿轮减速器优化设计
基于MATLAB的齿轮还原设计优化是一项具有挑战性的任务,需要深入了解齿轮动力学和有效利用MATLAB的能力。
该项目的目标是优化齿轮减速系统的设计,以在最小的能量损失下实现最佳性能。
优化过程的第一步是使用MATLAB来模拟齿轮还原系统。
这涉及到创建一个数学模型,准确代表系统的动态。
模型必须考虑到每个齿轮上的牙齿数量,齿轮比,应用于系统的扭矩,以及其他重要的参数。
一旦模型被创建,就可以用来模拟不同条件下的减速齿轮系统的性能。
为了优化齿轮减速系统的设计,可以使用MATLAB的优化工具箱。
这个工具箱提供了一系列优化算法,可以用来寻找系统参数的最佳值。
这些算法可用于尽量减少能量损失,最大限度地提高效率,或者实现任何其他性能目标。
通过运行不同起始值和约束的优化算法,可以找到减速齿轮系统的最佳设计。
除了使用MATLAB的优化工具箱外,还必须考虑减速齿轮系统的局限性和局限性。
齿轮的尺寸和重量,可用的扭矩,以及理想的齿轮比都是在优化过程中必须考虑的重要制约因素。
通过将这些限制纳入优化算法,可以实现符合所有要求的设计。
一旦找到符合性能和约束要求的设计,就必须使用MATLAB验证设计。
这涉及对优化参数进行模拟,以确保减速齿轮系统如期运行。
如果模拟显示系统没有达到预期的性能目标,可能需要进一步优化或调整设计。
利用MATLAB设计和优化减速系统是一项复杂但有益的任务。
通过使用MATLAB的模型和优化能力,有可能找到一个能满足所有性能和约束要求的减速齿轮系统的最佳设计。
这有助于为各种应用建立高效和可靠的减速齿轮系统。
优化设计Matlab程序
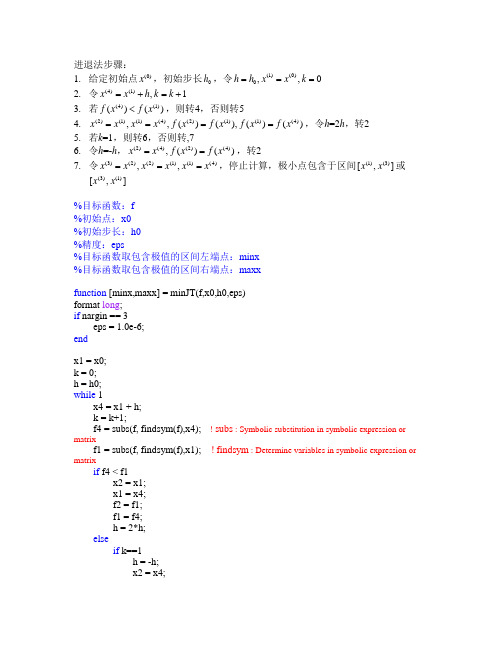
进退法步骤:1. 给定初始点(0)x ,初始步长0h ,令(1)(0)0,,0h h x x k ===2.令(4)(1),1x x h k k =+=+ 3.若(4)(1)()()f x f x <,则转4,否则转5 4.(2)(1)(1)(4)(2)(1)(1)(4),,()(),()()x x x x f x f x f x f x ====,令h =2h ,转2 5.若k =1,则转6,否则转,7 6.令h =-h ,(2)(4)(2)(4),()()x x f x f x ==,转2 7. 令(3)(2)(2)(1)(1)(4),,x x x x x x ===,停止计算,极小点包含于区间(1)(3)[,]x x 或(3)(1)[,]x x%目标函数:f%初始点:x0%初始步长:h0%精度:eps%目标函数取包含极值的区间左端点:minx%目标函数取包含极值的区间右端点:maxxfunction [minx,maxx] = minJT(f,x0,h0,eps)format long ;if nargin == 3eps = 1.0e-6;endx1 = x0;k = 0;h = h0;while 1x4 = x1 + h;k = k+1;f4 = subs(f, findsym(f),x4); ! subs : Symbolic substitution in symbolic expression or matrixf1 = subs(f, findsym(f),x1); ! findsym : Determine variables in symbolic expression or matrixif f4 < f1x2 = x1;x1 = x4;f2 = f1;f1 = f4;h = 2*h;elseif k==1h = -h;x2 = x4;f2 = f4;elsex3 = x2;x2 = x1;x1 = x4;break;endendendminx = min(x1,x3); maxx = x1+x3 - minx; format short;syms t;f=t^4-t^2-2*t+5;[x1,x2]=minJT(f,0,0.1)黄金分割法:% 目标函数:f% 极值区间左端点:a% 极值区间右端点:b% 精度:eps% 目标函数取最小值时的自变量值:x % 目标函数的最小值:minffunction [x,minf] = minHJ(f,a,b,eps) format long;if nargin == 3eps = 1.0e-6;endl = a + 0.382*(b-a);u = a + 0.618*(b-a);k=1;tol = b-a;while tol>eps && k<100000fl = subs(f , findsym(f), l);fu = subs(f , findsym(f), u);if fl > fua = l;l = u;u = a + 0.618*(b - a);elseb = u;u = l;l = a + 0.382*(b-a);endk = k+1;tol = abs(b - a);endif k == 100000disp('找不到最小值');x = NaN;minf = NaN;return;endx = (a+b)/2;minf = subs(f, findsym(f),x);format short;抛物线法:% 目标函数:f% 极值区间左端点:a% 极值区间右端点:b% 精度:eps% 目标函数取最小值时的自变量值:x% 目标函数的最小值:minffunction [x,minf] = minPWX(f,a,b,eps)format long;if nargin == 3eps = 1.0e-6;endt0 = (a+b)/2;k = 0;tol = 1;while tol>epsfa = subs(f,findsym(f),a);fb = subs(f,findsym(f),b);ft0 = subs(f,findsym(f),t0);tu = fa*(b^2 - t0^2)+fb*(t0^2 - a^2)+ft0*(a^2 - b^2);td = fa*(b - t0)+fb*(t0 - a)+ft0*(a - b);t1 = tu/2/td;ft1 = subs(f,findsym(f),t1);tol = abs(t1 - t0);if ft1 <= ft0if t1<= t0b = t0;t0 = t1;elsea = t0;t0 = t1;endk = k+1;elseif t1<= t0a = t1;elseb = t1;endk = k+1;endendx = t1;minf = subs(f,findsym(f),x); format short;一维牛顿法:% 目标函数:f% 初始点:x0% 精度:eps% 目标函数取最小值时的自变量值:x % 目标函数的最小值:minffunction [x,minf] = minNewton(f,x0,eps) format long;if nargin == 2eps = 1.0e-6;enddf = diff(f);d2f = diff(df);k = 0;tol = 1;while tol>epsdfx = subs(df,findsym(df),x0);d2fx=subs(d2f,findsym(d2f),x0;x1=x0-dfx/d2fx;k = k + 1;tol = abs(dfx);x0 = x1;endx = x1;minf = subs(f,findsym(f),x);format short;最速下降法:%: 目标函数:f%: 初始点:x0%: 自变量向量:var%: 精度:eps%: 目标函数取最小值时的自变量值:x%: 目标函数的最小值:minffunction [x,minf] = minFD(f,x0,var,eps)format long;if nargin == 3eps = 1.0e-6;endsyms l;tol = 1;gradf = - jacobian(f,var);while tol>epsv = Funval(gradf,var,x0);!Objective function value of the current point tol = norm(v); ! Vector and matrix normsy = x0 + l*v;yf = Funval(f,var,y);[a,b] = minJT(yf,0,0.1); %初始点0,步长为0.1xm = minHJ(yf,a,b);x1 = x0 + xm*v;x0 = x1;endx = x1;minf = Funval(f,var,x);format short;用共轭梯度法求无约束问题minf(x),n x R ∈的算法步骤如下:1. 给定初始点(0)x ,及精度ε2. 若(0)()f x ε∇≤,停止,极小点为(0)x ,否则转3.3. 取(0)(0)()d f x =-∇,且置k=04. 用一维搜索法求k α,使得()()()()()min ()k k k k k f x d f x d αα+=+令(1)()()k k k x x d α+=+,转55. 若(1)()k f x ε+∇≤,停止,极小点为(1)k x +,否则转66. 若k+1=n ,令(0)()n x x =转3,否则转77. 令2(1)(1)(1)()2()()(),()k k k k k k k f x d f x d f x λλ+++∇=-∇+=∇,置1k k =+,转4程序举例:function [x,minf] = minGETD(f,x0,var,eps) format long ;if nargin == 3eps = 1.0e-6;endx0 = transpose(x0);n = length(var);syms l ;gradf = jacobian(f,var);v0 = Funval(gradf,var,x0);d = -transpose(v0);k = 0;while 1v = Funval(gradf,var,x0);tol = norm(v);if tol<=epsx = x0;break;endy = x0 + l*d;yf = Funval(f,var,y);[a,b] = minJT(yf,0,0.1);xm = minHJ(yf,a,b);x1 = x0 + xm*d;vk = Funval(gradf,var,x1);tol = norm(vk);if tol<=epsx = x1;break;endif k+1==nx0 = x1;continue;elselamda = dot(vk,vk)/dot(v,v);d = -transpose(vk) + lamda*d;k = k+1;x0 = x1;endendminf = Funval(f,var,x);format short;用牛顿法求无约束问题,步骤:1. 给定初始点(0)x ,及精度ε2. 若(0)(f x ε∇≤,停止,极小点为(0)x ,否则转3.3. 计算12()()k f x -⎡⎤∇⎣⎦,令2()1()[()]();k k k d f x f x -=-∇∇ 4. 令(1)()(),1k k k x x d k k +=+=+,转2程序举例:function [x,minf] = minNT(f,x0,var,eps) format long ;if nargin == 3eps = 1.0e-6;endtol = 1;x0 = transpose(x0);gradf = jacobian(f,var);jacf = jacobian(gradf,var);while tol>epsv = Funval(gradf,var,x0); tol = norm(v);pv = Funval(jacf,var,x0);p = -inv(pv)*transpose(v);p = double(p);x1 = x0 + p;x0 = x1;endx = x1;minf = Funval(f,var,x);format short;syms t s;f=(t-4)^2+(s+2)^2+1;[x, mf]=minNewton(f, [0 0],[t s])。
机械优化设计MATLAB程序

机械优化设计MATLAB程序正文:⒈前言⑴研究背景机械优化设计是一种在机械工程领域中被广泛应用的方法,旨在通过使用数学模型和优化算法来改进机械系统的性能。
MATLAB是一种强大的数值计算和编程工具,可以用于开发机械优化设计程序。
⑵目的和范围⒉问题描述⑴设计需求在开始编写机械优化设计程序之前,需要明确设计需求,即需要实现的机械系统的性能指标或目标。
这些需求可以包括系统的功率、效率、噪声、振动等方面。
⑵优化目标根据设计需求,确定最终优化目标。
例如,通过调整机械系统的参数来最大化系统的效率、最小化系统的振动等。
⒊数学模型⑴设计变量设计变量是机械系统中可以调整的参数。
需要对设计变量进行定义和范围设定,以确保优化算法能够在合理的范围内搜索最优解。
⑵约束条件约束条件是在进行优化时必须满足的条件。
这些条件可以包括设计变量的边界条件、约束函数等。
在编写MATLAB程序时,需要将这些约束条件作为输入参数。
⒋算法选择与实现⑴优化算法选择根据优化目标和系统的特点,选择合适的优化算法。
常见的优化算法包括遗传算法、粒子群优化算法、模拟退火算法等。
⑵优化算法实现根据选择的优化算法,编写MATLAB程序实现优化过程。
程序应包括目标函数的定义、算法的参数设置、迭代过程和终止条件等。
⒌算法验证与结果分析⑴数据采集与处理在进行机械优化设计实验时,需要采集相应的实验数据,并对数据进行处理。
这些数据可以包括设计变量的调整情况、系统性能指标的变化等。
⑵结果分析基于采集到的数据,分析和比较不同优化算法的性能。
可以绘制图表展示优化过程和结果的变化,以便于进一步分析和优化。
⒍结论与展望总结机械优化设计MATLAB程序的设计过程和结果,对实验结果进行分析,并提出未来改进和研究的方向。
1、本文档涉及附件:附件1:MATLAB程序代码示例附件2:数据采集记录表2、本文所涉及的法律名词及注释:机械优化设计:指利用数学模型和优化算法改善机械系统性能的方法。
MATLAB在机械优化设计中的应用
MATLAB在机械优化设计中的应用摘要:本文通过阐述MATLABOptimizationToolbox模块的多个复杂函数模型,分析了该软件在机械设计中的重要作用,并进行了相关的案例优化分析。
关键词:MATLAB;机械设计;优化;引言在机械设计中,传统的设计过程主要是通过定性分析或不断试凑确定设计结果,效果差且效率低,而机械优化设计是通过运用数学规划和计算机技术求得最优方案。
1、MATLAB软件及其优化工具箱MATLAB在管理科学与工程、机械优化设计以及数据分析与处理等众多领域均有广泛应用。
该软件包括主软件和大量子工具箱两部分,在机械优化设计领域可以选择OptimizationToolbox,该工具箱内包含大量设计计算函数。
2、MATLAB在机械优化设计中的应用2.1线性规划及应用在MATLAB的专用工具箱模块内,线性规划问题可以选择linprog函数处理该情况。
以下为线性规划数学模型:因此,,曲柄摇杆机构的L1=1,L2=52.531,L3=55.412,L4=5。
4、结束语通过阐述MATLAB在机械设计中的关于线性规划及应用、无约束和有约束应用三种优化应用方式,总结出MATLAB的使用流程,并经过以上机械设计中的实例优化分析得出,在机械设计过程中融入MATLAB优化设计工具,不但可以保证设计出的产品达到使用要求,而且在保证零件安全性和可靠性的基础上优化了零件的结构设计,并同时极大的提升了设计效率。
参考文献[1]郭蓓蓓. MATLAB在机械优化设计中的应用[J]. 科技展望, 2016, 26(18).[2]朱艳华, 周春梅. 基于MATLAB的曲柄摇杆机构的机械优化设计[J]. 科技创新与应用, 2014(34):34-35.。
MATLAB软件在优化设计中的应用
MATLAB软件在优化设计中的应用首先,MATLAB在工程设计中的应用非常广泛。
例如,在机械工程中,MATLAB可以用于优化零件的尺寸、形状和结构,以提高其性能和可靠性。
通过使用MATLAB的优化算法,工程师可以确定最佳设计,同时考虑多个约束条件,例如材料成本、制造工艺等。
此外,MATLAB还可以用于优化流体力学问题,例如优化船舶的阻力和航速,优化管道的流量和压力损失等。
其次,MATLAB在金融风险计算中的应用也非常重要。
金融市场是一个高度不确定和复杂的系统,需要在投资决策中考虑多个因素和风险。
MATLAB中的金融工具箱提供了一系列用于风险建模和优化的功能,例如投资组合的风险和回报分析、风险价值和条件风险测量等。
金融机构和投资公司可以使用MATLAB进行投资组合优化,以确定最佳的资产配置,以最大化回报或最小化风险。
另外,MATLAB在电力系统优化中也有广泛应用。
电力系统是一个复杂的网络系统,其中包括发电机、变压器、输电线路等。
优化电力系统可以提高能源利用率,减少能源浪费和环境影响。
MATLAB可以用于电力系统的规划和操作优化,例如确定最佳发电机组合、优化输电线路配置、最小化电网损耗等。
此外,MATLAB还可以应用于电力市场设计和电力系统稳定性分析等方面。
除了上述几个领域,MATLAB还可以在许多其他优化设计问题中应用。
例如,在交通规划中,MATLAB可以用于优化交通信号时间表,以最大化交通流量和减少拥堵。
在医学影像处理中,MATLAB可以优化图像重建算法,以提高对图像中细微结构的分辨能力。
在化工厂的过程优化中,MATLAB可以用于寻找最佳操作条件,以提高生产效率和产品质量。
总之,MATLAB在优化设计中具有广泛的应用。
其强大的数学计算能力和灵活的编程环境使其成为解决各种优化问题的理想工具。
不仅可以用于工程设计、金融风险计算和电力系统优化等领域,还可以在交通规划、医学影像处理和化工过程优化等领域中发挥重要作用。
优化设计Matlab实例解析

优化设计Matlab实例解析MATLAB是一种基于矩阵运算的高级编程语言和环境,被广泛应用于各个领域的科学计算和工程问题。
在实际应用中,我们经常面临优化设计的任务,即在给定的限制条件下,寻找最优的解决方案。
优化设计可以应用于诸如控制系统设计、信号处理、图像处理、机器学习等问题中。
下面我们以一个简单的例子来说明如何使用MATLAB进行优化设计。
假设我们有一个矩形花园,每边有一定的长度,我们希望找到一个长和宽使得花园的面积最大化。
令矩形花园的长和宽分别为x和y,由于边长有限制条件,即x的范围为0到20,y的范围为0到10,同时花园的长度之和不得超过30。
我们的目标是找到一组合适的x和y,使得面积A 最大。
在MATLAB中,我们可以使用优化工具箱中的函数fmincon来求解这个问题。
以下是具体的实现步骤:1.创建目标函数首先,我们需要定义一个目标函数来评估每组x和y的解决方案。
在这个例子中,我们的目标是最大化矩形花园的面积,因此我们的目标函数可以简单地定义为A=x*y。
```matlabfunction A = objective(x)A=-x(1)*x(2);%最大化面积,取负号end```2.设置限制条件接下来,我们需要定义限制条件。
在这个例子中,我们需要考虑两个限制条件,即x和y的范围以及长度之和的限制。
我们可以使用函数fmincon提供的constr函数来定义这些限制条件。
```matlabfunction [c, ceq] = constr(x)c=[x(1)-20;%x的上限x(2)-10;%y的上限x(1)+x(2)-30];%长度之和的限制ceq = []; % 无等式限制end```3.求解问题有了目标函数和限制条件,我们可以使用fmincon函数来求解问题。
```matlabx0=[10,5];%初始猜测lb = [0, 0]; % x和y的下限ub = [20, 10]; % x和y的上限options = optimoptions('fmincon', 'Display', 'iter'); % 设置选项```在这里,我们使用了初始猜测x0、x和y的上下限lb和ub以及其他选项。
MATLAB关于Powell优化设计程序

f0 = X0_1(1)^2+2*X0_1(2)^2-4*X0_1(1)-2*X0_1(1)*X0_1(2); % 初始点的函数值.
Dt1_1 = f0-f1; % 计算本轮相邻两点函数值的下降量. Dt2_1 = f1-f2; Dtm_1 = max(Dt1_1,Dt2_1); % 进行收敛判断(是否用得到的第一个共轭方向替换上一轮中的第一个一维搜索方向). if (F3<F1&&(F1+F3-2*F2)*(F1-F2-Dtm_1)^2<0.5*Dtm_1*(F1-F3)^2) S1_2 = S2_1; S2_2 = S_1; else S1_2 = S2_1; S2_2 = S1_1; end syms a3 % 以下语句是求出沿S_1方向进行一维搜索的最佳步长因子以及第二轮迭代的初始点X0_2. X_1 = X2_1+a3*S_1; f3 = X_1(1)^2+2*X_1(2)^2-4*X_1(1)-2*X_1(1)*X_1(2); ff3 = diff(f3); a3 = solve(ff3,0); % 求得沿S_1方向进行一维搜索的最优步长 a3. X_1 = X2_1+a3*S_1; f3 = eval(X_1(1)^2+2*X_1(2)^2-4*X_1(1)-2*X_1(1)*X_1(2)); % 得到第二轮迭代的初始点X_1处的函数值. X0_2 =eval(X_1); F_1 = f3; % 进行迭代终止检验 d1 = sqrt((X0_2(1)-X0_1(1))^2+(X0_2(2)-X0_1(2))^2); if (d1>E) % 得到d1 = 2.886173937932362 fprintf('第一轮迭代完成过后的精度检验值为:d1 = %4f\n',d1) % 进行迭代终止检验是否继续进行下一轮迭代 % 第二轮迭代(K=2!) % 沿S2_1方向进行第二轮迭代第一次一维搜索 syms a4 % 以下语句是求出沿S1_2方向进行一维搜索的最佳步长因子 X1_2 = X0_2+a4*S1_2; f4 = X1_2(1)^2+2*X1_2(2)^2-4*X1_2(1)-2*X1_2(1)*X1_2(2); ff4 = diff(f4); a4 = solve(ff4,0);% 得到第二轮迭代第一次一维搜索的最优步长因子a4. fprintf('第二轮迭代第一次一维搜索的最优步长因子为: a4 = %4f\n',eval(a4)) X1_2 = X0_2+a4*S1_2; f4 = eval(X1_2(1)^2+2*X1_2(2)^2-4*X1_2(1)-2*X1_2(1)*X1_2(2)); % 得到第二轮迭代点X1_2处的函数值f4. % 沿S2_2方向进行第二轮迭代第二次一维搜索 syms a5 X2_2 = X1_2 + a5*S2_2; f5 = X2_2(1)^2+2*X2_2(2)^2-4*X2_2(1)-2*X2_2(1)*X2_2(2); ff5 = diff(f5); % 得到第二轮的迭代初始点X0_2.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械优化设计课程设计题目:齿轮减速器最优化设计班级:机械班成员2013年6月19日一.设计题目:二级斜齿圆柱减速器的最优化设计二.设计要求:要求减速器有最小的体积和最紧凑的结构三.原始数据:四.设计内容1.设计方案的拟定及说明2.电动机的选择及参数计算3.带轮的初选与计算4.计算圆柱斜齿轮的输入转矩、传动比、转速,然后建立数学模型编写matlab语言程序,运行程序包括geardesign. m 齿轮系统设计主程序Gearobjfun. m目标函数子程序Gearconstr. m 约束条件子程序Gearparameter.m许用应力计算子程序5.输出结果1.该减速器为二级斜齿圆柱减速器,低速级采用二级斜齿圆柱齿轮传动,选择三相交流异步电动机,v带传动2.确定电动机的容量:选择电动机的容量应保证电动机的额定功率大于等于工作机所需要的功率电动机参数t=60/40=1.5s v=s/t=6.0*10^-3m/s P=0.5FV=0.5*110*60*0.001=3.3kw1.η=η1* η32*η23*η4*η5其中齿轮传动η1=0.96滚动轴承η2=0.98齿轮传动η3=0.97联轴器η4=0.99卷筒η5=1.0η=0.96*0.98^3*0.97^2*0.99*1.00=0.84 P d=3.3\0.84=2.93kw三,确定电动机的转速已知压片机的转速40piece/min带传动的传动比i1=2~4 二级齿轮减速器的传动比i2=8~40,所以电动机的转动范围n=i1i2n=640~6400r/min可行方案如下确定电动机的转速具体数据如下计算减速器输入转矩T1,输入转速n,总传动比iiα=1420/40=35.5 初值i0=3计算i=iα/i0=35.5/3=10.52转速n=n m/i0=1420/3=473.33r/min输入转矩T d=9550*3.93/1420=26.43N.mT=T d*i0*η=26.43*3*0.96=72.12N.m输入转矩T1=76.12N.m,输入转速n1=473.33r/min,总传动比11.83建立二级减速器的数学模型,并用MATLAB 语言编制求解程序,如下3.程序如下:(1)%geardesign.m4.global rat;5.global kk;6.global tt1;7.global n0;8.global t;9.global hbs;10.global sigmahp;11.global sigmafp;12.kk=1.2;13.tt1=7.612e4;14.rat01=4;15.rat=11.83;16.n0=473.33;17.t=24000;18.hbs=[280,240,280,240];19.[sigmahp,sigmafp]=gearparameter(rat01);20.x0=[2,3,30,25,4,10,15,];21.options=optimset('Display','iter','TolFun',1e-8);22.lbnd=[2,2,20,20,3,8,8];23.ubnd=[4,4,40,40,5,16,16];24.[x,f,exitflag,output]=fmincon('gearobjfun',x0,[],[],[],[],lbnd,ubnd,'gearconstr',options)(2)%gearobjfun.mfunction f=gearobjfun(x)global rat;f=(x(1)*x(3)*(1+x(5)))/cos(x(6)*pi/180)+(x(2)*x(4)*(1+rat/x(5)))/ cos(x(7)*pi/180);(3)%约束条件子程序gearconstr.mfunction [c,ceq]=gearconstr(x)global rat;global tt1;global kk;global sigmahp;global sigmafp;beta(1)=x(6)*pi/180;beta(2)=x(7)*pi/180;epa(1)=(1.88-3.2*(x(5)+1)/x(3)/x(5))*cos(beta(1));epa(2)=(1.88-3.2*(rat+x(5))/x(4)/rat)*cos(beta(2));for i=1:2yep(i)=1.053/epa(i);zep(i)=sqrt(yep(i));zh(i)=2.9027-0.3702*exp(beta(i));endzv(1)=x(3)/(cos(beta(1)))^3;zv(2)=x(5)*zv(1);zv(3)=x(4)/(cos(beta(2)))^3;zv(4)=rat/x(5)*zv(3);for i=1:4yfa(i)=3.8193-0.3628*log(zv(i));%齿形系数ysa(i)=1.1233+0.146*log(zv(i));%应力校正系数endfor i=1:2epsbeta(i)=0.318*x(i+2)*tan(beta(i));ybeta(i)=1.0-epsbeta(i)*x(i+5)/120;if(ybeta(i)<0.75)ybeta(i)=0.75;endendc(1)=zh(1)*zep(1)*(cos(beta(1)))^2*sqrt((1+1/x(5))/(x(1)*x(3))^3) *sqrt(kk*tt1)-3.726e-3*sigmahp(2);c(2)=zh(2)*zep(2)*(cos(beta(2)))^2*sqrt((x(5)*(1+x(5)/rat))/(x(2) *x(4))^3)*sqrt(kk*tt1)-3.802e-3*sigmahp(4);c(3)=(cos(beta(1)))^2/x(3)^2/x(1)^3*yfa(1)*ysa(1)*yep(1)*ybeta(1) *kk*tt1-0.5*sigmafp(1);c(4)=(cos(beta(1)))^2/x(3)^2/x(1)^3*yfa(2)*ysa(2)*yep(1)*ybeta(1) *kk*tt1-0.5*sigmafp(2);c(5)=x(5)*(cos(beta(2)))^2/x(4)^2/x(2)^3*yfa(3)*ysa(3)*yep(2)*ybe ta(2)*kk*tt1-0.5208*sigmafp(3);c(6)=x(5)*(cos(beta(2)))^2/x(4)^2/x(2)^3*yfa(4)*ysa(4)*yep(2)*ybe ta(2)*kk*tt1-0.5208*sigmafp(4);%非线性约束问题d1=x(1)*x(3)/cos(beta(1));d2=x(1)*x(3)*x(5)/cos(beta(1));d3=x(2)*x(4)/cos(beta(2));d4=x(2)*x(4)*rat*x(5)/cos(beta(2));a1=0.5*x(1)*x(3)*(1+x(5))/cos(beta(1));a2=0.5*x(2)*x(4)*(1+rat/x(5))/cos(beta(2));c(7)=d4-d2-20;c(8)=40+0.5*d2-a2;c(9)=d2-350;c(10)=d4-350;c(11)=50-d1;c(12)=abs(2*x(1)-round(2*x(1)))-0.001;c(13)=abs(2*x(2)-round(2*x(2)))-0.001;ceq=[];(4)%gearparameter.mfunction [sigmahp,sigmafp]=gearparameter(rat01)global n0;global rat;global kk;global t;global hbs;for i=1:4sigmah(i)=495+0.889*(hbs(i)-150);sigmaf(i)=170+0.3*(hbs(i)-150);endnr(1)=n0;nr(2)=nr(1)/rat01;nr(3)=nr(1)/rat01;nr(4)=n0/rat;for i=1:4nn(i)=60*nr(i)*t;if(nn(i)<1e+5) zn(i)=1.6;elseif(nn(i)<1e+7) zn(i)=2.75-0.1006*log(nn(i));else zn(i)=1.0;endif(nn(i)<1e+4) yn(i)=2.5;elseif(nn(i)<3*1e6) yn(i)=5.06-0.2728*log(nn(i));else yn(i)=1.0;endendfor i=1:4sigmahp(i)=sigmah(i)*zn(i)/1.1;sigmafp(i)=sigmaf(i)*yn(i)*1.48;end运行上述最优化设计程序,得到以下结果:Max Line search Directional First-orderIter F-count f(x) constraint steplength derivative optimality Procedure0 8 611.911 3410 Infeasible start point1 16 620.428 1068 1 5.9 169 infeasible2 24 663.819 680.6 1 6.9 163 Hessian modified; infeasible3 32 614.864 544.1 1 -14.4 142 Hessian modified; infeasible4 40 557.166 479 1 -29 135 infeasible5 48 512.611 441.2 1 -16.4 135 infeasible6 58 506.971 435.8 0.25 -3.32 135 infeasible7 69 504.897 433.5 0.125 -3.22 135infeasible8 81 503.994 432.7 0.0625 -3.2 135 infeasible9 103 503.995 432.7 -6.1e-005 -3.19 135 infeasible10 125 503.996 432.7 -6.1e-005 -3.19 135 infeasible11 134 497.358 474.5 0.5 -3.19 134 infeasible12 143 493.941 496.3 0.5 -3.24 134 infeasible13 152 492.149 508.2 0.5 -3.38 134 infeasible14 160 490.287 521.5 1 -3.5 134 infeasible15 168 490.245 523.3 1 -14.9 134 infeasible16 190 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible17 212 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible18 234 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible19 256 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible20 278 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible21 300 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible22 322 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible23 344 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible24 366 490.245 523.3 -6.1e-005 88.7 134 Hessian modified twice; infeasible25 388 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible26 410 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible27 432 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible28 454 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible29 476 490.245 523.2 -6.1e-005 88.7 134Hessian modified twice; infeasible30 498 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible31 520 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible32 542 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible33 564 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible34 586 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible35 608 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible36 630 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible37 652 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible38 674 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible39 696 490.245 523.2 -6.1e-005 88.7 134 Hessian modified twice; infeasible40 707 490.255 523.3 0.125 88.7 134 Hessian modified twice; infeasibleSolver stopped prematurely.fmincon stopped because it exceeded the function evaluation limit,options.MaxFunEvals = 700 (the default value).x =2.5225 1.2726 40.4671 19.2726 2.2726 7.3134 7.2726f =490.2449exitflag =output =iterations: 40funcCount: 707lssteplength: 0.1250stepsize: 1.1490e-004algorithm: 'medium-scale: SQP, Quasi-Newton, line-search'firstorderopt: 133.5199constrviolation: 523.2813message: 'Solver stopped prematurely.fmincon stopped because it exceeded the function evaluation limit,options.MaxFunEvals = 700 (the default value).'>>输出最优解如下:x =2.5225 1.2726 40.4671 19.2726 2.2726 7.3134 7.2726f =490.2449经过适当的圆整和标准化修正后的齿轮传动系统设计参数见表如下:经过进一步的分析,证明此设计结果正确合理,是满足设计要求并使中心距取5 的倍数系列值时的最佳方案.注意上述材料有几处错误以上资料仅供参考。