Arduino常用函数精编版
arduino基本函数

arduino基本函数Arduino是一款开源的电子原型平台,它提供了一套用于编写和上传代码的基本函数库。
这些基本函数可以帮助开发者实现各种功能,从简单的控制LED灯的开关,到复杂的传感器数据采集和处理。
本文将介绍几个常用的Arduino基本函数,并展示它们的用法和作用。
1. pinMode函数pinMode函数用于设置Arduino的引脚模式,可以将引脚设置为输入模式(INPUT)或输出模式(OUTPUT)。
在输入模式下,引脚可以接收外部信号;在输出模式下,引脚可以控制外部设备。
例如,以下代码将引脚13设置为输出模式:```pinMode(13, OUTPUT);```2. digitalWrite函数digitalWrite函数用于控制引脚的电平状态,可以将引脚设置为高电平(HIGH)或低电平(LOW)。
在输出模式下,可以使用digitalWrite函数控制LED灯的亮灭。
例如,以下代码将引脚13设置为高电平,点亮LED灯:```digitalWrite(13, HIGH);```3. digitalRead函数digitalRead函数用于读取引脚的电平状态,可以获取引脚接收到的外部信号。
在输入模式下,可以使用digitalRead函数读取传感器的数据。
例如,以下代码将读取引脚2的电平状态并将结果存储在变量sensorValue中:```int sensorValue = digitalRead(2);```4. analogWrite函数analogWrite函数用于模拟输出,可以通过调节引脚的占空比来控制输出的电压。
这个函数通常用于控制PWM(脉宽调制)信号。
例如,以下代码将引脚9设置为模拟输出模式,并将占空比设置为50%:```analogWrite(9, 128);```5. analogRead函数analogRead函数用于读取引脚的模拟电压值,可以获取传感器输出的模拟信号。
例如,以下代码将读取引脚A0的模拟电压值并将结果存储在变量sensorValue中:```int sensorValue = analogRead(A0);```6. delay函数delay函数用于延迟一段时间,可以暂停程序的执行。
arduino基本函数
arduino基本函数Arduino是一种开源硬件平台,它基于易于使用的硬件和软件,可以用于创建各种互动项目。
在本文中,我们将介绍一些Arduino的基本函数,这些函数是编写Arduino代码时经常使用的。
1. digitalWrite()函数:这个函数用于将指定的引脚设置为高电平(HIGH)或低电平(LOW)。
例如,digitalWrite(13, HIGH)会将数字引脚13设置为高电平。
2. pinMode()函数:这个函数用于将指定的引脚设置为输入(INPUT)或输出(OUTPUT)模式。
例如,pinMode(13, OUTPUT)会将数字引脚13设置为输出模式。
3. digitalRead()函数:这个函数用于读取指定引脚的电平状态,返回值为HIGH或LOW。
例如,state = digitalRead(13)会将数字引脚13的电平状态保存在变量state中。
4. analogWrite()函数:这个函数用于在指定的引脚上产生模拟信号。
模拟信号的取值范围是0到255,对应于引脚的电压范围0到5V。
例如,analogWrite(9, 127)会在数字引脚9上输出一个占空比为50%的PWM信号。
5. analogRead()函数:这个函数用于读取指定引脚上的模拟信号。
模拟信号的取值范围是0到1023,对应于引脚的电压范围0到5V。
例如,value = analogRead(A0)会将模拟引脚A0上的模拟信号读取到变量value中。
6. delay()函数:这个函数用于延迟指定的毫秒数。
例如,delay(1000)会延迟1秒。
7. millis()函数:这个函数返回自Arduino开机以来的毫秒数。
它常用于计时或控制时间间隔。
例如,currentTime = millis()会将当前的毫秒数保存在变量currentTime中。
8. Serial.begin()函数:这个函数用于初始化串口通信,并指定波特率。
Arduino参考手册-函数和变量及电路图
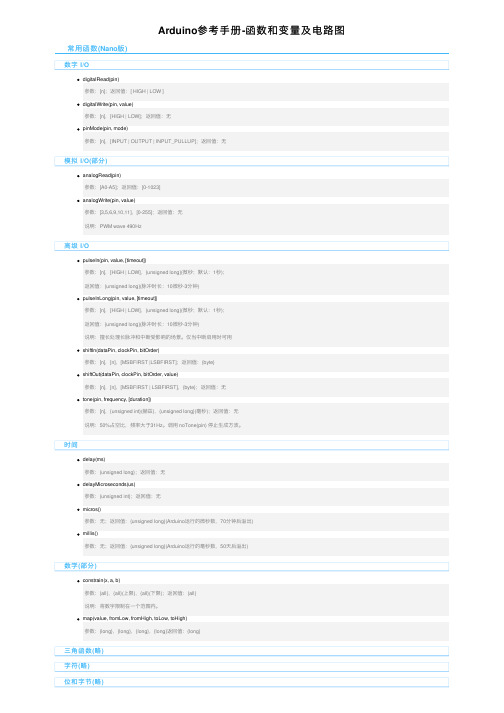
Arduino参考⼿册-函数和变量及电路图常⽤函数(Nano版)数字 I/OdigitalRead(pin)参数:[n];返回值:[ HIGH | LOW ]digitalWrite(pin, value)参数:[n],[HIGH | LOW];返回值:⽆pinMode(pin, mode)参数:[n],[INPUT | OUTPUT | INPUT_PULLUP];返回值:⽆模拟 I/O(部分)analogRead(pin)参数:[A0-A5];返回值:[0-1023]analogWrite(pin, value)参数:[3,5,6,9,10,11],[0-255];返回值:⽆说明:PWM wave 490Hz⾼级 I/OpulseIn(pin, value, [timeout])参数:[n],[HIGH | LOW],{unsigned long}(微秒;默认:1秒);返回值:{unsigned long}(脉冲时长:10微秒-3分钟)pulseInLong(pin, value, [timeout])参数:[n],[HIGH | LOW],{unsigned long}(微秒;默认:1秒);返回值:{unsigned long}(脉冲时长:10微秒-3分钟)说明:擅长处理长脉冲和中断受影响的场景。
仅当中断启⽤时可⽤shiftIn(dataPin, clockPin, bitOrder)参数:[n],[n],[MSBFIRST |LSBFIRST];返回值:{byte}shiftOut(dataPin, clockPin, bitOrder, value)参数:[n],[n],[MSBFIRST | LSBFIRST],{byte};返回值:⽆tone(pin, frequency, [duration])参数:[n],{unsigned int}(赫兹),{unsigned long}(毫秒);返回值:⽆说明:50%占空⽐,频率⼤于31Hz。
arduino 常用函数
Arduino常用函数一、什么是ArduinoArduino是一种开源电子原型平台,用于设计和制造通过电子和软件创建的交互式项目。
它基于易于使用的硬件和软件,由全球广大的创客共同开发和改进。
Arduino平台非常适合创造独具创意的自动化装置、机器人、传感器以及其他物联网相关的项目。
二、常用函数概述Arduino提供了丰富的库函数和内置函数,以简化开发过程。
这些函数涵盖了各种常见任务,如控制IO口、读取传感器数据、与外部设备通信等。
在本文中,我们将介绍几个常用的Arduino函数。
三、DigitalWrite函数1. 函数概述digitalWrite()函数用于设置数字引脚的电平。
通过该函数,可以将数字引脚设置为高电平(高电压)或低电平(低电压),从而控制相应的设备。
2. 函数语法digitalWrite(pin, value);3. 函数参数•pin:要设置电平的引脚编号。
•value:引脚的电平,可选值为高电平(HIGH)和低电平(LOW)。
4. 示例下面的示例演示了如何使用digitalWrite()函数控制LED灯亮灭:int ledPin = 13; // LED连接的引脚void setup() {pinMode(ledPin, OUTPUT); // 将引脚设置为输出模式}void loop() {digitalWrite(ledPin, HIGH); // 设置引脚为高电平,LED灯亮起delay(1000); // 延迟1秒digitalWrite(ledPin, LOW); // 设置引脚为低电平,LED灯熄灭delay(1000); // 延迟1秒}四、AnalogRead函数1. 函数概述analogRead()函数用于读取模拟引脚的电压值。
通过该函数,可以获取传感器等模拟设备的输出电压,并进行相应的处理。
2. 函数语法analogRead(pin);3. 函数参数•pin:要读取电压的引脚编号。
Arduino学习笔记(四)--常用函数
Arduino学习笔记(四)--常⽤函数1、pinMode(pin,Mode):设置引脚的输⼊输出状态Pin:引脚号;Mode:INPUT、OUTPUT2、digitalWrite(pin,value) :设置输出引脚的⾼低电平状态Pin:引脚号;value:HIGH LOW3、int digitalRead(pin):读取引脚的状态,并返回HIGH 或LOWPin:引脚号4、int analogRead(pin):读出模拟引脚上的电压,并以⼆进制数值返回(0~1023)对应为0~5vPin:引脚号5、analogWrite(pin,value):给PWM引脚输出电压值pin:引脚号;value:具体的pwm值,(0~255对应表⽰⼀个周期的⾼电平占空⽐)6、shiftOut(dataPin,clockPin,bitOrder,value):将⼀个字节的数据通过移位的⽅式逐位的输出。
dataPin:数据引脚clockPin:时钟引脚bitOrder:移位顺序(MSBFIRST-⾼;LSBFIRST-低)value:需要进⾏移位传输的值说明:在输出数据时,当⼀位数据写⼊数据输出引脚时,时钟引脚将输出脉冲信号,指⽰该位数据已被写⼊数据输出引脚等待外设读取。
并且在使⽤本函数之前datapin和clockpin引脚应该设置为输出状态。
本函数⼀次只能输出⼀个字节的内容,也就是说最⼤⼀次只能输出255,如果⼤于255,就要多次调⽤这个函数。
7、unsigned long mills():回传单⽚机从开始执⾏到现在⽬前的时间(单位:ms)8、delay( number):占⽤单⽚机的时间(单位:ms)number:其代表占⽤单⽚机的时间长度9、delay Microseconds( number):占⽤单⽚机的时间(单位:us)number:其代表占⽤单⽚机的时间10、pulseIn(pin,state,timeout):读取脉冲宽度。
第03章 Arduino基本函数
图3 按键开关实物图
A d u i n o 第 3 章 阿 帝 诺 基 本 函 数
此种按键有4个脚,从背面看如图4(a)所示,其原 理图如图4(b)所示。
(a) 按键引脚图 图4 按键引脚/原理图
(b) 按键原理图
在按键没有按下去的时候1,2号脚相连,3,4 号 脚相连。按键按下去的时候,1,2,3,4号脚就全部接通
A d u i n o 第 3 章 阿 帝 诺 基 本 函 数
第3章
本章内容:
Arduino基本函数
• 时间函数
• 数字I/O函数
• 中断函数
• 串口通信函数
• SPI函数
• 模拟I/O函数
• 随机函数 • 数学函数
A d u i n o 第 3 章 阿 帝 诺 基 本 函 数
3.1 时间函数
1. millis( )
A d u i n o 第 3 章 阿 帝 诺 基 本 函 数
3.3
模拟I/O函数
1. analogReference(type)
analogReference函数的作用是配置模拟引脚的参 考电压。在嵌入式应用中引脚获取模拟电压值之后, 将根据参考电压将模拟值转换到0~1023。该函数为 无返回值函数,参数为type类型,有3种类型(DEFAU LT /INTERNAL/EXTERNAL),具体含义如下: 。 DEFAULT :默认值,参考电压为5V。 INTERNAL:低电压模式,使用片内基准电压源。 EXTERNAL:扩展模式,通过AREF引脚获取参考 电压,AREF引脚位置见图。
analogWrite函数为无返回值函数,有两个参数
pin和value,参数pin表示所要设置的引脚,只能选择 函数支持的引脚;参数value表示PWM输出的占空比 ,范围在0~255的区间,对应的占空比为0%~100%
(完整word版)Arduino常用函数
(1)pinMode(接口名称,OUTPUT或INPUT),将指定的接口定义为输入或输出接口,用在setup()函数里。
(2)digitalWrite(接口名称,HIGH(高)或LOW(低)),将数字输入输出接口的数值置高或置低。
(3)digitalRead(接口名称),读出数字接口的值,并将该值作为返回值。
(4)analogWrite(接口名称,数值),给一个模拟接口写入模拟值(PWM脉冲)。
数值取值0-255。
(5)analogRead(接口名称),从指定的模拟接口读取数值,Arduino对该模拟值进行数字转换,这个方法将输入的0~5V电压值转换为0~1023间的整数值,并将该整数值作为返回值。
(6)delay(时间),延时一段时间,以毫秒为单位,如1000为1秒。
(7)Serial.begin(波特率),设置串行每秒传输数据的速率(波特率)。
在与计算机进行通讯时,可以使用下面这些值:300、1200、2400、4800、9600、14400、19200、28800、38400、57600或115200,一般9600、57600和115200比较常见。
除此之外还可以使用其他需要的特定数值,如与0号或1号引脚通信就需要特殊的波特率。
该函数用在setup()函数里。
Serial.available() 的意思是:返回串口缓冲区中当前剩余的字符个数。
一般用这个函数来判断串口的缓冲区有无数据,当Serial.available()>0时,说明串口接收到了数据,可以读取;Serial.read()指从串口的缓冲区取出并读取一个Byte的数据,比如有设备通过串口向Arduino发送数据了,我们就可以用Serial.read()来读取发送的数据。
while(Serial.available()>0){data= Serial.read();delay(2);}(8)Serial.read(),读取串行端口中持续输入的数据,并将读入的数据作为返回值。
Arduino函数

//定义变量以存储读值
pinMode(LEDPin,OUTPUT); //设置针脚为输出针脚 } //从输入针脚读取数值
void loop()
{ val = analogRead(analogPin); analogWrite(LEDPin,val/4);
//以val/4的数值点亮LED(因为analogRead读取的数值为0~1023,
4) constrain(x,a,b)
描述: 将一个数值约束在一个范围内。
参数: x,要被约束的数值,适用于所有的数据类型; a, 该范围的最小值,适用于所有的数据类型; b,该范围的 最大值,适用于所有的数据类型。 返回值: x,如果x是介于a和b之间;
a,如果x小于a;
b,如果x大于b。
5) map(value,fromLow,fromHigh,toLow,toHigh)
参数: type,使用哪种引用类型(DEFAULT、INTERNAL、
INTERNAL1V1、INTERNAL2V56或者EXTERNAL)。 注意事项: 改变基准电压后,之前从analogRead()读取的 数据可能不准确。
2) analogRead()
描述: 从指定的模拟引脚读取数据值。Arduino板包含一个6 通道(Mini和Nano有8个通道,Mega有16个通道)、10位模 拟/数字转换器,这表示它将0~5V的输入电压映像到0~1023 的整数值,即每个读数对应电压值为5V/1024,都每单位
4
时间函数
1) millis()
2) micros() 3) delay()
Contents
4) delayMicroseconds()
Arduino函数
数的分数幂,其用来产生指数幂的数或曲线非常方便。 参数: base,底数(float); exponent,幂(float)。 返回: 一个数的幂次方值(double)。
7) sqrt(x) 描述: 计算一个数的平方根。 参数: x,被开方数,任何类型。 返回: 此数的平方根,类型double。
2
模拟I/O
1) analogReference(type)
2) analogRead()
3) analogWrite()
Contents
1) analogReference(type)
描述: 设定用于模拟输入的基准电压(输入范围的最大值)。 DEFAULT: 默认值5V (Arduino板为5V)或3V(Arduino板为 3.3V)为基准电压。 INTERNAL: 在ATmega168和ATmega328上以1.1V为基准
数。该针脚可以连接压电蜂鸣器或其他喇叭播放声音。在
同一时刻只能产生一个声音。如果一个针脚已经在播放音 乐,那么呼叫tone()将不会有任何效果。如果音乐在同一 个针脚上播放,那么它会自动调整频率。使用tone()函数 会与3脚和11脚的PWM产生干扰(Mega板除外)。
2) noTone() 描述: 停止由tone()产生的方波。如果没有使用,tone()
4
时间函数
1) millis()
2) micros() 3) delay()
Contents
4) delayMicroseconds()
1) millis() 描述: 返回Arduino开发板运行当前程序开始的毫秒数,这个 数字将在约50天后溢出(归零)。 2) micros()
arduino基本函数
关键字:ifif...elseforswitch case whiledo... while breakcontinuereturngoto语法符号:;{}///* */运算符:=+-*/%==!=<><=>=&&||!++--+=-=*=/=数据类型:boolean 布尔类型char 字符类型byte 字节类型int 整数类型unsigned int 无符号整型long 长整型unsigned long 无符号长整型float 实数类型doublestringarrayvoid常量:HIGH | LOW 表示数字IO 口的电平,HIGH 表示高电平(1),LOW 表示低电平(0)。
INPUT | OUTPUT 表示数字IO 口的方向,INPUT 表示辒入(高阻态),OUTPUT 表示辒出(AVR能提供5V电压 40mA电流)。
true | false true 表示真(1),false表示假(0)。
具体使用可以结合实验的程序1、声明变量及接口名称(int val;int ledPin=13;)。
2、setup()——函数在程序开始时使用,可以初始化变量、接口模式、启用库等(例如:pinMode(ledPin,OUTUPT);)。
3、loop()——在setup()函数之后,即初始化之后,loop() 让你的程序循环地被执行。
使用它来运转Arduino。
接下来就开始学习一下几个基本函数。
1、pinMode(接口名称,OUTPUT或INPUT)将——接口定义为输入或输出接口,用在setup()函数里。
2、digitalWrite(接口名称, HIGH或LOW)——将数字接口值至高或低。
3、digitalRead(接口名称)——读出数字接口的值。
4、analogWrite(接口名称, 数值)——给一个接口写入模拟值(PWM波)。
对于ATmega168芯片的Arduino(包括Mini或BT),该函数可以工作于3, 5, 6, 9, 10和11号接口。
Arduino-串口操作函数与示例代码大全
Arduino-串⼝操作函数与⽰例代码⼤全Arduino - 串⼝操作函数与⽰例代码⼤全本⽂总结了Arduino常⽤串⼝操作函数,函数说明部分来源于,⽰例与实验部分为⾃编。
本⽂是对Arduino串⼝操作函数的较全⾯总结,可作为⼯具贴查找使⽤。
1.串⼝设置Serial.begin();说明开启串⼝,通常置于setup()函数中。
语法Serial.begin(speed);Serial.begin(speed,config);参数speed: 波特率,⼀般取值300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600,115200config: 设置数据位、校验位和停⽌位。
例如Serial.begin(speed,Serial_8N1); Serial_8N1中:8表⽰8个数据位,N表⽰没有校验,1表⽰有1个停⽌位。
返回None⽰例void setup() {Serial.begin(9600); // opensserial port, sets data rate to 9600 bps}Serial.end();说明禁⽌串⼝传输函数。
此时串⼝传输的pin脚可以作为数字IO脚使⽤。
语法Serial.end()参数None返回None2.清空串⼝缓存Serial.flush();说明1.0版本之前为清空串⼝缓存,现在该函数作⽤为等待输出数据传送完毕。
如果要清空串⼝缓存的话,可以使⽤:while(Serial.read() >= 0)来代替。
语法Serial.flush ()参数None返回Nonewhile(Serial.read()>= 0){}说明因Serial.read()函数读取串⼝缓存中的⼀个字符,并删除已读字符。
因此可以⽤这句代码来清空串⼝缓存。
实验代码详见下⽂代码。
语法while(Serial.read() >=0){}参数None返回None3.输出串⼝数据将打印输出串⼝数据的函数在这⼀⼩节给出,⽅便⼤家阅读后⾯的各个⽰例代码。
Arduino 语法手册精编版

16.1analogReference()
16.2analogRead()
16.3analogWrite() PWM
十七、高级I/O
17.1tone()
17.2noTone()
17.3shiftOut()
17.4shiftIn()
17.5pulseIn()
十八、时间
18.1millis()
2.8 continue
2.9 return
2.10 goto
三、扩展语法
3.1 ;(分号)
3.2 {}(花括号)
3.3 //(单行注释)
3.4 /* */(多行注释)
3.5 #define
3.6 #include
四、算数运算符
4.1=(赋值运算符)
4.2 +(加)
4.3 -(减)
4.4 *(Leabharlann )4.5 /(除)11.12double(双精度浮点数)
11.13string(char array/字符串)
11.14String object(String类)
11.15array(数组)
十二、数据类型转换
12.1char()
12.2byte()
12.3int()
12.4word()
12.5long()
12.6float()
10.2INPUT|OUTPUT(数字引脚(Digital pins)定义)
10.3true | false(逻辑层定义)
10.4integer constants(整数常量)
10.5floating point constants(浮点常量)
十一、数据类型
11.1void
arduino库基础函数
arduino库基础函数Arduino库基础函数是一组用于配置和控制Arduino板和其外设的函数。
这些函数可以通过调用Arduino的库进行使用,以实现各种功能。
以下是一些常用的基础函数以及相关的参考内容:1. pinMode: 该函数用于设置指定引脚的模式,可选择为输入(INPUT)或输出(OUTPUT)模式。
函数原型:void pinMode(uint8_t pin, uint8_t mode)参考内容:Arduino官方文档中的pinMode函数,该文档详细介绍了函数的用法和参数说明。
2. digitalWrite: 该函数用于将指定引脚设置为高电平(HIGH)或低电平(LOW)。
函数原型:void digitalWrite(uint8_t pin, uint8_t value)参考内容:Arduino官方文档中的digitalWrite函数。
3. digitalRead: 该函数用于读取指定引脚的当前电平状态,返回值为高电平(HIGH)或低电平(LOW)。
函数原型:int digitalRead(uint8_t pin)参考内容:Arduino官方文档中的digitalRead函数。
4. analogWrite: 该函数用于通过调整PWM(脉冲宽度调制)信号的占空比来模拟模拟信号输出。
函数原型:void analogWrite(uint8_t pin, int value)参考内容:Arduino官方文档中的analogWrite函数。
5. analogRead: 该函数用于读取指定引脚上的模拟输入值,返回值为0-1023之间的整数。
函数原型:int analogRead(uint8_t pin)参考内容:Arduino官方文档中的analogRead函数。
6. delay: 该函数用于暂停程序执行一段时间,以毫秒为单位。
函数原型:void delay(unsigned long ms)参考内容:Arduino官方文档中的delay函数。
arduino基础-函数(arduino基础-函数).doc
arduino基础-函数(arduino基础-函数)Input output functionArduino contains a switching function of some processing input and output, is believed to have the book from a program example・PinMode (pin, mode)Specifies the digital foot (digital, pin) as input or output・Example:PinMode (7, INPUT); / / pin 7 is set as input modeDigitalWrite (pin, value)Specifies the number of pins to be on or off. The pin must firstbe passed through the pinMode as input or output mode, and the digitalWrite will take effect・Example:DigitalWrite (8, HIGH) ; / / set the high potential output pin 8Int digitalRead (PIN)Read the value of the input pin and return HIGH when it is sensed that the foot is at high potentia 1. Otherwise, it will return LOW.Example:Vai 二digitalRead (7) ; / / read pin 7 values and assigned to val Int analogRead (PIN)Read the voltage of the analog foot and return a value from 0 to 1023 to indicate the corresponding 0 to 5 voltage value・Example:Val 二analogRead (0) ; / / read analog pin 0 values and assigned to the variable valAnalogWrite (pin, value)Change the output voltage of the PWM pin, and the feet are usually at 3, 5, 6, 9, 10 and 11. The Value range is 0-255, for example, the output voltage is 2.5 volts (V), and the value is about 128.Example:AnalogWrite (9128); / / output voltage of about 2. 5 volts (V)Unsigned, long, pulseln (pin, value)Sets the duration of the read position of the foot, for example, when an infrared or accelerometer is used to measure a certain value, without changing the state in the time unit・Example:Time 二pulsein (7, HIGH) : / / set foot 7 state in the unit oftime is HIGHShiftOut (dataPin, clockPin, bitOrder, value)The data is passed to a register used to extend the digital output ・ The function uses one foot to represent the data and one foot to indicate the pulse・ BitOrder is used to represent the movement of bits (the lowest significant bit of LSBFIRST or the most significant bit of MSBFIRST), and finally the value output in byte form・ This function is usually used in the output of the extended digit・Example:ShiftOut (dataPin, clockPin, LSBFIRST, 255);Time functionControl and calculate the time during execution of the chipUnsigned, long, millis ()The return chip begins to execute to the current millisecondExample:Duration 二millis (-lastTime); / / said that since the〃lastTime〃the present timeDelay (MS)How many milliseconds does the pause chip execute?Example:Delay (500) ; / / suspended for half a second (500 milliseconds) Delay Microseconds (US)How many microseconds does the pause chip execute?Example:DelayMicroseconds (1000); / / suspend 1 milliseconds Mathematical functionTrigonometric functions and basic mathematical operationsMin (x, y)Return between the smallerExample:Vai 二min (10), 20); / / return 10Max (x, y)Return between largerExample:Vai 二max (10,20); / / return 20ABS (x)Returning the absolute value of the number, you can turn negative numbers into positive numbers・Example:Vai 二ABS (-5); / / return 5Constrain (x, a, b)Determine the state of the X variable between a and B・ X if less than a, return a; between a and B, return x itself; greater than B, return BExample:Vai 二constrain (analogRead (0), 0, 255); / / ignore a number greater than 255Map (value, fromLow, fromHigh, toLow, toHigh)Converts value variables to toLow and tolligh ranges in accordance with the fromLow and fromHigh ranges・ Often used to read analog signals and convert them to the range values required by the program.Such as:Vai = map (analogRead (0), 01023100, 200) ; / / the value analogO the read signal equivalence to 100 - 200.Double pow (base, exponent)An index (exponent) value that returns a number (base)・Example:Double x 二pow (y, 32); / / set X to 32 yDouble sqrt (x)Returns the square root value of the double type・Example:Double a 二sqrt (1138) ; / / return 33. 73425674438 approximation of the square root of 1138Double sin (RAD)The trigonometric function sine value of the return angle (radians)・Example:Double sine 二 sin (2) ; / / approximate value of 0. 90929737091Double cos (RAD)The trigonometric function cosine value of the return angle (radians)・Example:Double cosine 二cos (2); / / -0.41614685058 approximation Double Tan (RAD)The trigonometric function tangent value of the return angle (radians)・Example:Double tangent 二Tan (2) ; / / -2.185******** approximation Random number functionGenerating random numbersRandomSeed (seed)In fact, the random number in Arduino is predictable・ So if you need a really messy number, you can call this function to reset and generate a random seed・ You can use the random number as a random number seed, to ensure that the figures appear in a random way, usually use analog input as a random seed, which can produce environment related random number (e.g., radio, telephone, and cosmic ray ray fluorescent lamps emitted electromagnetic wave)・RandomSeed (analogRead (5)): / / use analog input as a random seedLong random (max)Long random (min, max)Returns the random number of the specified interval, the type is long. If no minimum is specified, the default is 0.Example:Long randnum 二random (0, 100); / / return number between 99 and 0 -Long randnum 二random (11) ; / / return number between 0 TO Sequence communicationIn the fifth chapter, you can see some examples of using serial ports to exchange messages with computers. Here is a functional explanation.Seria1. begin (speed)You can specify the rate at which Arduino can exchange messages from a computer, usually using 9600 bps・ Of course, you can use other speeds, but usually no more than 115200 BPS (bytes per second)・Seria1. begin (9600);Seria1. print (data)Seria1. print (data, encoding)Transmit data through serial ports, providing options for encoding ・ If not specified, the default is sent in plain text.Example:Seria1. print (75); / / print "75〃Seria1. print (75, DEC); / / print 〃75〃Seria1. print (75, HEX); / / (75 sixteen carry)Seria1. print (75, OCT); / / 〃113〃(75 in eight carry)Serial, print (75, BIN): / / 〃1001011〃(75 bit)Seria1. print (75, BYTE); / / 〃K〃(with byte transmission, display with ASCII encoding)Seria1. printin (data)Seria1. printin (data, encoding)Same as Seria1. print (), but a newline character is added at theend of the data・ It means that you press Enter after you have hit some data on the keyboard.Example:Seria1. printin (75); / / print "75〃Seria1. printin (75, DEC); / / print 〃75〃Seria1. printin (75, HEX); / / 4B〃Seria1. printin (75, OCT); / / 113 〃〃Seria1. printin(75, BIN); / / 1001011 〃〃Seria1. printin (75, BYTE); / / K〃Int, Seria 1. available ()Data returned by a number of bytes (bytes) has not been read by the read () function, and if the return value is 0, all data on the serial port have been read by the read () function.Example:Int count 二Seria1. available ();Int, Seria 1. read ()Read lbyte sequence dataExample:Int data 二Seria 1. read ();Seria 1. flush ()Sometimes you can use this function to clear the data in the buffer because the data is too fast to exceed the speed at which the data is processed by the program・ This function ensures that the data in the buffer (buffer) is up to date・Example:Seria 1. flush ();。
arduino库基础函数

arduino库基础函数Arduino库基础函数Arduino是一种开源硬件平台,它可以帮助您轻松地设计和构建各种电子设备。
Arduino库是一个集成的开发环境,用于编写、上传和运行代码。
在这个环境中,有许多基础函数可以帮助您实现各种功能。
本文将介绍一些常用的基础函数。
数字输入输出函数数字输入输出函数可用于控制数字引脚的状态。
以下是一些常见的数字输入输出函数:digitalWrite(pin, value):该函数设置指定引脚的状态为HIGH或LOW。
digitalRead(pin):该函数读取指定引脚的状态,并返回HIGH或LOW。
pinMode(pin, mode):该函数设置指定引脚的模式(输入或输出)。
例如,以下代码将设置引脚13为输出模式,并将其状态设置为HIGH:```void setup() {pinMode(13, OUTPUT);}void loop() {digitalWrite(13, HIGH);}```模拟输入输出函数模拟输入输出函数可用于控制模拟引脚的状态。
以下是一些常见的模拟输入输出函数:analogWrite(pin, value):该函数设置指定引脚的PWM值(0~255)。
analogRead(pin):该函数读取指定引脚上的模拟值,并返回0~1023之间的整数值。
例如,以下代码将设置引脚9为PWM输出模式,并将其PWM值设置为128:```void setup() {pinMode(9, OUTPUT);}void loop() {analogWrite(9, 128);}```延迟函数延迟函数可用于暂停程序的执行。
以下是一些常见的延迟函数:delay(ms):该函数暂停程序的执行,以毫秒为单位。
delayMicroseconds(us):该函数暂停程序的执行,以微秒为单位。
例如,以下代码将设置引脚13为输出模式,并将其状态在HIGH和LOW之间切换,并在切换之间暂停500毫秒:```void setup() {pinMode(13, OUTPUT);}void loop() {digitalWrite(13, HIGH);delay(500);digitalWrite(13, LOW);delay(500);}```串口通信函数串口通信函数可用于通过串口与计算机或其他设备进行通信。
arduino常用函数(一)

时间函数
1. millis( )
millis函数可获取机器运行的时间长度,单位为ms。系统 最长的记录时间为9小时22分,超出时间将从0开始。函数返 回值为unsigned long型,无参数 。
2. delay(ms)
delay函数是一个延时函数,参数表示延时时长,单位是 ms。函数无返回值
3. delayMicroseconds( us)
参数pin表示所要配置的引脚 mode表示需要的模式—INPUT或OUTPUT 该函数一般用在初始化部分
数字I/O函数
2、digitalWrite(pin , value)
digitalWrite函数用来设置引脚为高电平或低电平, 无返回值。
参数pin表示所要配置的引脚
value表示输出的电压HIGH(高电平)或LOW(低电 平)
delayMicroseconds函数是一个延时函数,不同在于其时 间单位是微秒。
数字I/O函数
数字信号: 数字信号是以0、1表示的电平不连续变化的信号,也就 是以二进制的形式表示的信号。
在Arduino中数字信号通过高低电平来表示,高电平则为数字信 号1,低电平则为数字信号0 。
Arduinduino的工作 电压。例如Arduino UNO的工作电压为5V,其高电平输出也是5V; Arduino Due工作电压为3.3V,所以高电平输出也就是3.3V。
数字I/O函数
3、digitalRead(pin)
digitalRead函数在引脚为输入的情况下,可获得引脚的 电压情况--HIGH(高电平)或LOW(低电平),
参数pin表示所要读取的引脚,该函数返回值为int,表 示引脚的电压情况。
Arduino UNO会将大于3V的输入电压视为高电平识别,小 于1.5V的电压视为低电平识别。所以,即使输入电压不太准 确,Arduino UNO也可以正常识别。需要注意的是,超过 5V的输入电压可能会损坏Arduino UNO。
arduino学习必须掌握的函数

必须掌握的函数,一共只有十个,所以一定要记住,没有什么难的1.数字输入输出I/O·①pinMode(pin, mode)说明:数字IO 口输入输出模式定义函数,pin 表示为0~13,mode 表示为INPUT 或OUTPUT。
作用:负责某一接口是输入还是输出,INPUT输入·②digitalWrite(pin,value)说明:数字IO口输出电平定义函数,pin 表示为0~13,value为HIGH 或LOW。
作用:定义HIGH可以点亮接在相应pin上的灯。
·③int state=digitalRead(pin)说明:数字IO口读输入电平函数,pin 表示为0~13。
作用:读取接在pin脚上的按键或传感器的状态,state为状态值为HIGH 或LOW。
模拟输入输出I/O·④int val=analogRead(pin)说明:模拟IO口读函数,pin 表示为0~5作用:读模拟传感器的状态,比如说电位器的位置(val表示为0~1023)。
主函数⑤void setup() 初始化程序,每次开机只运行一次⑥void loop() 在setup()函数之后,即初始化之后,loop() 让你的程序循环地被执行。
使用它来运转Arduino。
连续执行函数内的语句,这部份的程式会一直重复的被执行,直到Arduino 板子被关闭。
⑦delay(100025); //设定延时时间,1000 = 1秒舵机控制⑧Servo myservo;说明:定义了使用的舵机的名字myservo,如用多个舵机,应起不同名字。
⑨myservo.attach(9);说明:放在setup()里,告诉单片机我的舵机接在那个引脚上了。
⑩myservo.write(pos);说明:放在loop()中,控制舵机运动到那个角度,pos从0到180。
Arduinoforesp8266常用函数
Arduinoforesp8266常⽤函数Serial.print("发送主题");串⼝输出,⼀般是字符串Serial.println(config.key);串⼝输出,可以是intSerial.printf("\r\nMAC address:%02X\r\n",mac[5]);串⼝输出,格式输出Serial.begin (115200);波特率:115200/9600常⽤ESP.wdtFeed();喂狗/资源释放ESP.getSdkVersion();获取SDK设备版本ESP.getFreeHeap();获取内存⼤⼩ESP.restart();重启WiFi.mode(WIFI_AP_STA);WiFi模式( WIFI_AP_STA / WIFI_AP )WiFi.disconnect();WiFi断开连接WiFi.localIP();WiFi本地IPif ( WiFi.status() != WL_CONNECTED )判断WiFi是否连接上,如果WiFi不连接上,做啥WiFi.stopSmartConfig();停⽌⼀键配⽹WiFi.beginSmartConfig();开始⼀键配⽹if (WiFi.smartConfigDone())⼀键配⽹是否完成WiFi.macAddress(mac);mac地址,以数组形式获取mac[n]WiFi.hostname(temp);设置WiFi主机名WiFi.begin(config.stassid, config.stapsw);WiFi开始连接,(WiFi名称,WiFi密码)strcpy(config.stapsw, WiFi.psk().c_str());字符串复制strcpy(config.stassid, WiFi.SSID().c_str());字符串复制if (strcmp(config.stassid, DEFAULT_STASSID) != 0)⽐较字符串函数,如果返回是0就是相等EEPROM.begin(1024);ROM开始1024字节EEPROM.write(i, *(p + i));ROM写⼈,(第⼏位,字符指针)mit();ROM写⼊完成,关闭IO流EEPROM.read(i);ROM读取。
第三章 Arduino的基本函数
3.6、随机数
①randomSeed(seed) randomSeed函数用来设置随机数种子,随机种子的设置对产生的 随机序列有影响。函数无返回值。
②random(howsmall, howbig) 应用 random函数可生成一个随机数,两个参数 howsmallz和 howbig决定了随机数的范围,函数的参数及返回值均为long型。
3.1、数字I/O
①pinMode(pin, mode) 配置引脚为输入或输出模式,它是一个无返回值函数,函数有两个参 数pin和mode,pin参数表示所要配置的引脚,mode参数表示设置的 模式:INPUT(输入)或 OUTPUT(输出)。
②digitalWrite(pin, value) digitalWrite函数也是在 Blink程序中见过的,它的作用是设置引脚的 输出的电压为高电平或低电平。该函数也是一个无返回值的函数, 函数有两个参数pin和 value,pin参数表示所要设置的引脚,value 参数表示输出的电压:HlGH(高电平)或LOW(低电平)。
3.4、时间函数
①millis() 应用millis函数可获取机器运行的时间长度,单位ms。系统最长的 记录时间为9小时22分,如果超出时间将从0开始。函数返回值为 unsigned long型,无参数。
②delay (ms) delay函数是一个延时函数,在 Blink程序中用到过,参数表示延时 时长,单位是ms,函数无返回值。
②analogRead(pin) • analogRead函数用于读取引脚的模拟量电压值,每读一次需要花
arduino基本函数
3.1.1 pinMode(pin, mode)3.1 数字I/O3.1.1 pinMode(pin, mode)pinMode函数在第2章中已经出现过了,用以配置引脚为输出或输出模式,它是一个无返回值函数,函数有两个参数pin和mode,pin参数表示所要配置的引脚,mode参数表示设置的模式—INPUT(输入)或OUTPUT(输出)。
注意:Arduino板上的模拟引脚也可以当做数字引脚使用,编号为14(对应模拟引脚0)到19(对应模拟引脚5)。
由于Arduino项目是完全开源的,所以pinMode(pin, mode)函数原型可直接在Arduino开发环境目录下的hardware\arduino\cores\arduino文件夹里的wiring_digital.c文件中查看。
函数原型有助于我们深入了解Ardnino的基本函数的底层实现方式,但这部分的内容需要在单独深入学习AVR单片机的基础上进行,本书将这些函数原型从文件中提取出来,有兴趣的读者可以参考一下。
一般只要能够熟练地使用这些Arduino基本函数就可以了,本书对函数原型没有进行过多讲解。
pinMode(pin, mode)函数原型:void pinMode(uint8_t pin, uint8_t mode){uint8_t bit = digitalPinToBitMask(pin);uint8_t port = digitalPinToPort(pin);volatile uint8_t *reg;if (port == NOT_A_PIN)return;reg = portModeRegister(port);if (mode == INPUT){uint8_t oldSREG = SREG;cli();*reg &= ~bit;SREG = oldSREG;}else{uint8_t oldSREG = SREG;cli();*reg |= bit;SREG = oldSREG;}}可以在开发环境中的下列实例程序中找到pinMode函数的应用:ADXL3xx.pde、AnalogInput.pde、Blink.pde、BlinkWithoutDelay.pde、Button.pde、Calibration.pde、Debounce.pde、Dimmer.pde、Knock.pde、Loop.pde、Melody.pde、Memsic2125.pde、PhysicalPixel.pde、Ping.pde3.1.2 digitalWrite(pin,value)digitalWrite函数也是在Blink程序中见到过的,它的作用是设置引脚的输出的电压为高电平或低电平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)pinMode(接口名称,OUTPUT或INPUT),将指定的接口定义为输入或输出接口,用在setup()函数里。
(2)digitalWrite(接口名称,HIGH(高)或LOW(低)),将数字输入输出接口的数值置高或置低。
(3)digitalRead(接口名称),读出数字接口的值,并将该值作为返回值。
(4)analogWrite(接口名称,数值),给一个模拟接口写入模拟值(PWM脉冲)。
数值取值0-255。
(5)analogRead(接口名称),从指定的模拟接口读取数值,Arduino对该模拟值进行数字转换,这个方法将输入的0~5V电压值转换为0~1023间的整数值,并将该整数值作为返回值。
(6)delay(时间),延时一段时间,以毫秒为单位,如1000为1秒。
(7)Serial.begin(波特率),设置串行每秒传输数据的速率(波特率)。
在与计算机进行通讯时,可以使用下面这些值:300、1200、2400、4800、9600、14400、19200、28800、38400、57600或115200,一般9600、57600和115200比较常见。
除此之外还可以使用其他需要的特定数值,如与0号或1号引脚通信就需要特殊的波特率。
该函数用在setup()函数里。
Serial.available() 的意思是:返回串口缓冲区中当前剩余的字符个数。
一般用这个函数来判断串口的缓冲区有无数据,当Serial.available()>0时,说明串口接收到了数据,可以读取;
Serial.read()指从串口的缓冲区取出并读取一个Byte的数据,比如有设备通过串口向Arduino发送数据了,我们就可以用Serial.read()来读取发送的数据。
while(Serial.available()>0)
{
data= Serial.read();
delay(2);
}
(8)Serial.read(),读取串行端口中持续输入的数据,并将读入的数据作为返回值。
(9)Serial.print(数据,数据的进制),从串行端口输出数据。
Serial.print(数据)默认为十进制,相当于Serial.print(数据,十进制)。
(10)Serial.println(数据,数据的进制),从串行端口输出数据,有所不同的是输出数据后跟随一个回车和一个换行符。
但是该函数所输出的值与Serial.print()一样。
常用函数
数字I/O类:
pinMode(pin,mode)数字IO口输入输出模式定义函数,将接口定义为输入或输出接口。
digitalWrite(pin,value)数字IO口输出电平定义函数,将数字接口值至高或低、开或关。
int digitalRead(pin)数字IO口读输入电平函数,读出数字接口的值,pin 表示为0~13。
模拟I/O类:
int analogRead(pin)模拟IO口读函数,从指定的模拟接口读取值。
analogWrite(pin,value)数字IO口PWM输出函数,给一个接口写入模拟值(输出PWM波)。
Value取值0-255。
扩展I/O类:
shiftOut(dataPin,clockPin,bitOrder,value)SPI外部IO扩展函数,通常使用带SPI接口的74HC595做8个IO扩展,把资料传给用来延伸数字输出的寄存器,此函数通常使用在延伸数字输出。
unsigned long pulseIn(pin,value)脉冲长度记录函数,设定读取脚位状态的持续时间,返回时间参数(μs)。
时间函数
unsigned long millis()返回时间函数(单位ms),回传单片机开始执行到目前的毫秒数。
该函数是指,当程序运行就开始计时并返回记录的时间参数。
该参数溢出大概需要50天时间。
数学函数
min(x,y)求最小值,回传两数之间较小者。
max(x,y)求最大值,回传两数之间较大者。
随机数函数
randomSeed(seed)随机种子数设置函数,使得随机数发生器产生的随机数更加不可预测。
long random(max)随机数返回函数,返回数据大于等于0,小于max。
long random(min,max)随机数返回函数,返回数据大于等于min,小于 max。
中断使能函数
interrupts()使能中断函数。
放开中断功能。
noInterrupts()禁止中断函数。
关闭中断功能。
attachInterrupt(interrupt, function, mode)
interrupt:中断引脚数function:中断发生时调用的函数,此函数必须不带参数和不返回任何值。
该函数有时被称为中断服务程序。
mode:定义何时发生中断以下四个contstants预定有效值:LOW 当引脚为低电平时,触发中断
CHANGE 当引脚电平发生改变时,触发中断
RISING 当引脚由低电平变为高电平时,触发中断
FALLING 当引脚由高电平变为低电平时,触发中断.
Arduino也可以忽略所有中断。
如果你需要在一段代码中不执行中断,只需要执行 noInterrupts()命令。
当这段代码执行完以后,你可以使用 interrupts()命令重新启用中断。
终端也可以通过detachInterrupt(interrupt_number)命令进行
删除。
串口收发函数
Serial.begin(speed)启用串口和定义波特率函数。
设置每秒串行传输数据的速率(波特率),即指定Arduino与PC微机交换信息的速率,通常选用9600bps(比特/秒)。
Serial.print(data)串行端口数据输出函数。
将输出结果显示于PC微机端的。