控制工程基础第2章答案资料
控制工程基础第二章参考答案
第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
控制工程基础第二章参考答案

第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
控制工程基础第2章答案
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
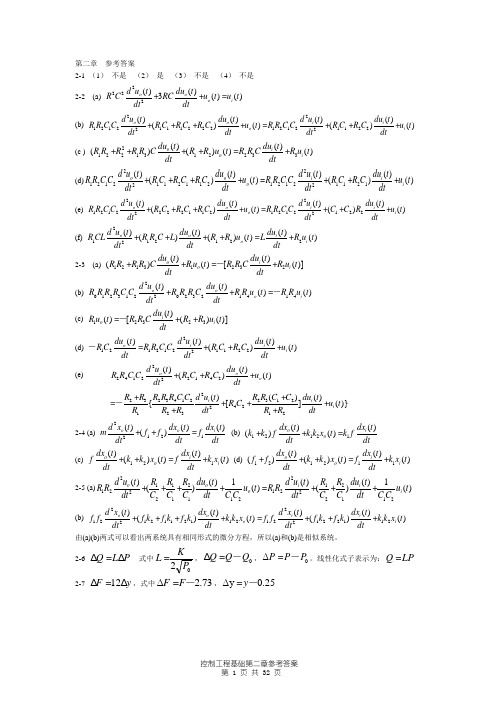
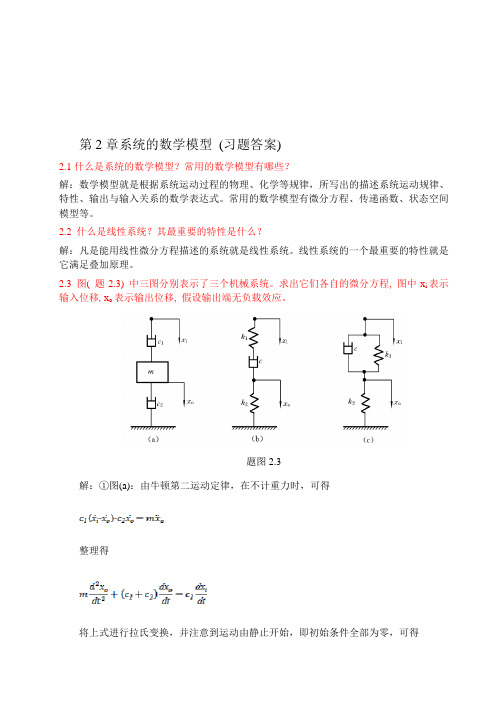
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
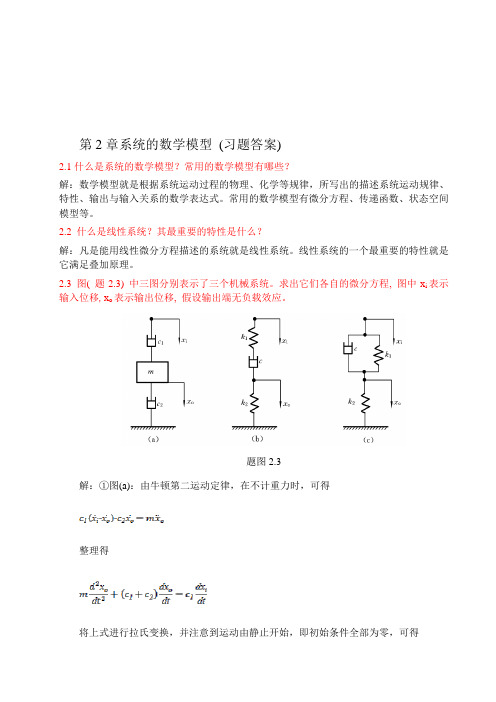
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-u )tfC)+-+-f)(a )(b )(c )(d R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
控制工程基础第2章答案资料

函数。 (2) 以 N(s)为输入,当 R(s) = 0 时,分别以 C(s),Y(s) ,B(s),E(s) 为输出的闭环传递函
解:凡是能用线性微分方程描述的系统就是线性系统。线性系统的一个最重要的特性就是 它满足叠加原理。
2.3 图 ( 题 2.3) 中三图分别表示了三个机械系统。求出它们各自的微分方程 输入位移 , xo 表示输出位移 , 假设输出端无负载效应。
, 图中 xi 表示
题图 2.3 解:①图 (a):由牛顿第二运动定律,在不计重力时,可得 整理得
对上式进行拉氏变换,并注意到运动由静止开始,即 则系统传递函数为
2.4 试建立下图(题图 2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点, 其中电压 ur (t ) 和位移 xr (t ) 为输入量;电压 uc (t ) 和位移 xc (t ) 为输出量; k , k1 和 k2 为弹簧弹 性系数; f 为阻尼系数。
RC duc dt
uc
RCdu r dt
方法二:
Uc( s ) Ur( s )
R R1
Cs
RCs RCs 1
RC duc dt
uc
RC dur dt
由于无质量,各受力点任何时刻均满足
F 0 ,则有:
f ( dx r dt
dxc ) dt
kx c
f dxc k dt
xc
f dx r k dt
U c (s) U r (s)
( 题 图 2.15) 所示 。已知 电位器最大 工作 角 度
控制工程基础第2章答案

第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-u )tfC)+-+-f)(a )(b )(c )(d R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
《控制工程基础》第二版 (董景新 著)课后习题答案 清华出版社

Xi
G1 G2
1+G1 H1+ G2 H2 +G1G2 H3 +G1G2H1H2 )
X0
G (s) =
G 1G 2 1 + G 1 H 1 + G 2 H 2 + G 1G 2 H 3 + G 1G 2 H 1 H 2
第二章习题解
2-7: 求X0(s) 和Xi2(s) (s)之间的闭环传递函数; 求X0(s) 和Xi1(s (s)之间的闭环传递函数;
G (s) =
G1G 2G 3G 4G 5 H 1 1 + G 4 + G1G 2 + G1G 2G 4 − G1G 4G 5 H 1H 2
第二章习题解
4):求出
X 02 ( s ) X i1 ( s )
-
解:第一步,方框图整理
-
G2 G1
Xi1 +
+
+
①
H2 H1
+
② G4 ③
X02 G5 G6
( g )解:设中间变量 : xa (t ) Q k ′ = (Ds + k1 )
x 0(t) k1 k2 m x a(t) (t)
(t) fi(t)
k ′x0 (t ) = k 2 [xa (t ) − x0 (t )] k ′ + k2 D x0 (t ) ∴ xa (t ) = k2 x 又:f i (t ) = m&&a (t ) + k 2 [xa (t ) − x0 (t )] k2 ∴ G (s ) = mDs 3 + m(k1 + k 2 )s 2 + k 2 Ds + k1k 2
机械控制工程基础习题答案

第二章习题答案2-1试求下列函数的拉氏变换,假设0<t 时,0)(=t f(1))3cos 1(5)(t t f -= 答案:⎪⎭⎫⎝⎛+-=22315)(s s s s F (2)t et f t10cos )(5.0-= 答案:2210)5.0(5.0)(+++=s s s F (3))35sin()(π+=t t f 答案:22225235521)(+⋅++⋅=s s s s F (4)atn e t t f =)( 答案:1)(!)(+-=n a s n s F 2-2求下列函数的拉氏变换(1)te t t tf 33232)(-++= 答案:32182)(42+++=s ss s F (2))0(4sin 2cos )(333≥++=---t te t e e t tf t t t答案:222244)3(42)1(1)3(6)(++++++++=s s s s s F(3)te t t tf 22)1()2(15)(-+-⋅= 答案:)2(32)2(25)(----+=s s e s e s s F (4)⎩⎨⎧><≤≤=ππt t t tt f ,000sin )(答案:提示)sin(sin )(π-+=t t t f ,se s s s F π-+++=1111)(22 2-3已知)1(10)(+=s s s F(1)利用终值定理,求∞→t 时)(t f 值 答案:10)1(10lim )(lim )(lim 0=+==→→∞→s s ss sF t f s s t(2)通过取)(s F 的拉氏反变换,求∞→t 时)(t f 值答案:[]()101)(10lim 11110lim )(lim )(lim 11=-⋅=⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛+-==-∞→-∞→-∞→∞→tt t t t e t s s L s F L t f 2-4已知2)2(1)(+=s s F (1)利用初值定理,求)0(f 和)0(f '的值。
机械控制工程基础第二章的答案及解析
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
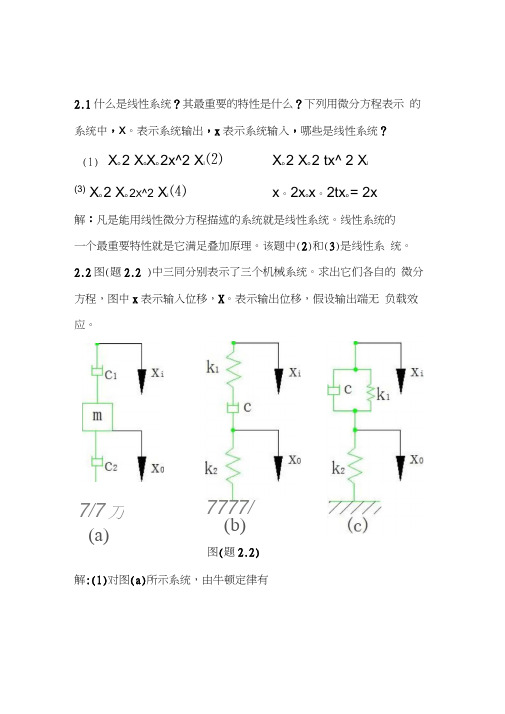
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
《控制工程基础》第3版-课后答案解析
lim e(t)
s0
lim
s0
sE(s)
lim s s0 1
G(s)
Xi (s)
所以,输入为 xi2 sin 6t 1(t), ess2 0.8
(对此题来说,还有一种办法:如果记得对于一阶惯性环节, 当输入为阶跃函数,t=4T时输出为输入的98%,则由放入水 中1min时为输入的98%可直接得出: T=1/4=0.25(min)
uo (30) 1 e 4 1V
arctan 1 2 arccos , cos
arctan 1 2 arccos , cos
3—19单位阶跃输人情况下测得某伺服机构的响应为
试求:(1)系统的闭环传递函数; (2)系统的无阻尼自振角频率及阻尼比。
解:ui (t) i(t)R1 uo (t)
uo (t)
1 c
i(t)dt i(t)R2
对方程式进行拉氏变换得:
U
i
(
s)
I (s)R1
UO (s)
UO (s)
1 Cs
I (s)
I (s)R2
Uo (s) R2Cs 1
消去I(s),得:Ui (s) (R1 R2 )Cs 1
Ds( x2 xo ) k2 xo
x2
Ds k2 Ds
xo
k1 x1
k1Ds k1k2 Ds
xo
k2 xo
(k1Ds k2 Ds k1k2 ) xo k1Dsxi
X o (s)
k1Ds
X i (s) (k1 k2 )Ds k1k2
机械控制工程基础第二章的答案及解析
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
《控制工程基础》第二版课后习题答案
第二章习题解答a) b)c——II— -------------- oC、1 i\Ro J pa)1必)=i(t)RRC _ %(" + u0(if = RC—曲(f) dt dt- ■Bb)M)=冲务甜("7 G)】} Mf)=fK(t) = Kx o(t)~iR o-i = 1R +4— f/?r二R严肖"吗=心站+u o C)R\R2C ~~ U n(^)+(^1 + R Z)U O0)= R&H 亍气Q) + R/i Q) at atKi f\({\ Bf dXj dx o、dt dt > Mld) d d临也吸临⑷+W)―吋2-^^^_]]_ 纟K (曲= A?2 (X 0 一 X } = B仗严心怡£陀©+“K 州(0=曲Q”K]K 円⑴dtdt10G02町 _9_-cLPQd 一%二遢十汕 itj =也十迢2dxdt17 G(5) =+ 5S 7 + 9$+ 7(Z l)(g +2)加]州2 £早+ (刚裙2 +旳坷+朋2*1 +砒2厉)今¥t/N+ (料《2 + 粮[K \ + BjS 》+ 〃1虽 + B2B3) &三川r+ (隔 + K 岛 + K 2B { + K% 爭 + K 、K 血 di二严 3dtJ + c@+Q )M +卯G(»E + 2捉£+1)? (£+3)3 辭 +25^8占(& +X| X 3")一3 一场鲁办J dt j83 GM )={$+□)($+帶E _a 1 c —b= ------------------ H ------(a-b)2 s + a a-b (5+6)2 (m —方尸 £+方8&⑷—用◎十2)(2十2f 十4)g(t) = £"[G<s)] = 1-2e~^ 十 e~x casVif, i H 0的4[G (帕和一遇型za~c 1g(z)=£-1[G(i)] = -_小+ -_ +- (d -by L@ ~^r a7 G(s) = ——5(x¥ + l)2 (-S + 3)_ 2 1 J 113 1 ~ 3 S 12 5 + 32(£ + l)2 45 + 1 <31 \—+ —/ e 就2丿2 ig ⑴=£T[G(9]=T 年号e _3r- 丸r>0■< />o 54 1i-2^—-F s £+ 2 s 1 +4\2士十(卄1乎+?1 1~2~ 13(恥吊P 血再1 s<D 2 S 2十血'= £+2 + ———{盼如2)g (t )= A _1[Gf5)] = 4s (r )+ 28(0+ 2k-&亠,r>oat242 x\t) - x(f) = 4sin/ + 5cos2r s x(0) = 1, x*(0) =-2h{7) + 2^(O+5X(0 = 3, X (0) = 0. /(0) = 01V2 2-肮(0)-玖 0) - X(f) = 4—^ + 5—^Z + l E+4 ^-2+4—!—+ 5^—M-U 2+4 s^i(s-2)(s 7 +1)(v 2 十4)十4(2 十4)+5$(W +1)-lXW+l)(/+4)X0)=丄--2 --誉亠l s —1K ?2 +1 Q+4x(f)=L ,+e r -2sin/—cos2/» t>0 3 Q X(s)+2sX(s) + 5X(s)=- s217OV+l)(A+2)0.6--0.6 1S'^ s ($ + 1尸+4M/)=(L6—OWL cos1^0.3e_f sin2c t>0*叫+2$+疔sI M +1= 0,6--0.6—二——03 _s (s+1)' 4 4 G+l”+4fl^+(l+b l^)(一+H Ish (I十 b 賀)(1—fl +^1嘗) ——® O S 丄A)ao3涉十朋+ KJ益(的-§誠⑻=(月弭+ KjXf ($)⑷=(伽+ KjX(R(恥+KXd”K』(s + K^)(B^ s + KJ + K\ R、s6b叱(4予(f)-怎(0-禹(0 .农⑴二恥(f)I馆(0二心比⑴-艾⑴]!如皆加)=陀)xz=乔二耳⑶-%⑸-压戈㈤F K^)=K{X O(S)同=忑[兀(町-*(舟]_ffl$Cl 2-0血⑴1Bs念(f)Rib)o-^附(f)o—1CG021mv2血(f)IId)讹f)-o/脚(f)二浙go-尤;(f)]办⑴二忌⑴-入⑹ 齐2(彳)=屍竝⑴儿⑴二丄[為㈤+耳㈤ms>耳(刀=銅心)-儿(创&©)=司尤⑷—血⑴]伦㈤=竝A31.心)—*2-10Cl-HI—R\ &RiC,必)o—b)卞C:就f)-------------- od)>□—+= i 护!z jy/7(^f+ b)J —+ 切”=(l)°n31~~|__H[—o―[J G)1?衍i"+ (T + ^3^)(1+訓。
控制工程基础习题答案(2章)

第二章6.某函数拉氏变换为 F(s)=)1(1+s s ,应用终值定理求f(t)的终值,并通过对F(s)进行拉氏反变换,求出f(t),当t →∞时求出f(∞)的值,说明计算结果的正确性。
解:1)应用终值定理求解:1)1(1lim )(lim )(lim 0=+==→→∞→s s ss sF t f s s t2)求F(s)的拉氏反变换:111)(+-=s s s F []t e s F L t f ---==1)()(11)( =∞∴f两种计算方法得到的结果相同。
15.系统的方框图如图2-51所示。
求:(1)以Xi (s)为输入,而分别以Xo(s),Y(s),Xb(s),E(s)为输出的闭环传递函数。
(2)以N(s)为输入,而分别以Xo (s),Y(s),Xb(s),E(s) 为输出的闭环传递函数。
解:(1)a.以Xi (s)为输入,以Xo(s)为输出)()()(1)()()(2121sHsGsGsGsGsGB+=b.以Xi (s)为输入,以Y(s)为输出)()()(1)()()()(211sHsGsGsGsXsYsGiB+==c. 以Xi (s)为输入,以Xb(s)为输出)()()(1)()(2121sHsGsGsXsGibB+==)()()(11)()()(21s H s G s G s X s E s G i B +==(2)a. 以N(s)为输入,以X o (s)为输出)()()(1)()()()(212s H s G s G s G s N s X s G o B +==b. 以N(s)为输入,以Y(s)为输出)()()(1)()(2121s H s G s G s Ns G B +==c. 以N(s)为输入,以X b (s)为输出)()()(1)()()()()(212s H s G s G s H s G s N s X s G b B +==)()()(1)()()()()(212s H s G s G s H s G s N s E s G B +-==16.试简化图2-52的方框图,并求出闭环传递函数。
《控制工程基础》第二版课后习题答案
第一章习题解笞U]>U2 U\ U2第二章习题解答2-1a) b)d)f)L^f| 忙d)f\ — fl =^2X O严(f)=$(M+E ⑴虑 如(f) =iQ)RRC^-u o (t)^u o (t) = RC^-u^t) at at fs (r)=B 低[xi (f) -曲(幼 j/B (t)=fK (t) = KXo(t) B dB d 『八10602斤不%()+%©二斤击可()占dR^c —% (0+ (*i + 心)% ⑴=邛应 ~u i (0+ R 2u t (0 atati =i R +,C u o =IR?:R R 严冃3宙 % =gR\ +u oa)=K ](旳一兀)+」:dx o ](J?l + J?2)C —«c (!)+ %("■ R Q C — Wj(O + tti (Oat at(K[ + K2)B — x o (t)+ K\K2X o (t)= K\R 〒曲(f)+ 琦心再(f)dt at10602a) b) c) Q © f)U Q —1/?2 + — j icit— Z/?| + iR-f H —J idte)dxK\% K i (兀 _ %) = K 》(兀)—x)=号二dtoB 2+ (®K° ++ B'B? + 场*3 + 水2〃?)& 2+ (K }B 2+K }B 3 + 心汝 + KM 巴2 + K }K 2X 2 dt3J S + 2用 + 8S-丘($ + 2)($戈+2$十4)广、■炉+ 5,2+9用+7E ($+恥 + 2)乡一rn\fU2K 2rdx { dx 2< dt dt ;/(O™-坷罕~_叭 dtdxj … 一 —- - K?x^ = m dtdx l dx 2dt dt护d 2x 2 2~d^ k,用典2+ (的+创坷+用2创+加2*3);?7皿乔对)13173 G($)= --------------- —(£+。
控制工程基础第三版习题答案_清华大学出版社

第二章2-1 解:(1): )](12[)](1[)](5[)]()4[()(t L t t L t L t t L S F ⋅+⋅++=δδ SS S S 215215022++=+++= (2): )25(253)(2++=s s S F (3): 11)(2++=-s e S F sπ(4): )}(1)6(1)]6(2cos 4{[)(5t e t t L S F t ⋅+-⋅-=-ππ5144512426226+++=+++=--S s Se S s Se ss ππ(5): Se S e S F ss 226600)(--+=+++= (6): )]4(1)90453cos(6[)(π-⋅--=t t L S F9636)]4(1)4(3cos 6[24224+=+=-⋅-=--S SeS Se t t L S Sππππ(7): )](18sin 25.0)(18cos [)(66t t e t t e L S F t t ⋅+⋅=--1001288)6(28)6(622222+++=++++++=S S S S S S (8): 99)20(52022)(262++++++=-s es s S F s π2-2解:(1): )(1)2()3221()(321t e e S S L t f t t ⋅+-=+++-=--- (2): )(12sin 21)(t t t f ⋅=(3): )(1)2sin 212(cos )(t t t e t f t ⋅+=(4): )1(1)1()(11-⋅=-=---t e S e L t f t s(5): )(1)22()(2t e e te t f t t t ⋅-+-=---(6): )(1215sin 15158))215()21(21515158()(2221t t e S L t f t⋅=++⋅=-- (7): )(1)3sin 313(cos )(t t t t f ⋅+=2-3 解:(1) 对原方程取拉氏变换,得:SS X x S SX x Sx S X S 1)(8)]0()([6)0()0()(2=+-+--⋅∙ 将初始条件代入,得:61)()86(1)(86)(6)(22++=++=+-+-S SS X S S SS X S SX S S X S48724781)86(16)(22+-++=++++=S S S S S S S S S X 取拉氏反变换,得:t t e e t x 42874781)(---+=(2) 当t=0时,将初始条件50)0(=∙x 代入方程,得:50+100x(0)=300 则x(0)=2.5对原方程取拉氏变换,得: sx(s)-x(0)+100x(s)=300/s 将x(0)=2.5代入,得:S300100X(S)2.5-SX(S)=+1005.03100)S(S 3002.5S X(S)+-=++=s s取拉氏反变换,得:-100t 0.5e -3x(t)=2-4解:该曲线表示的函数为:)0002.0(16)(-⋅=t t u则其拉氏变换为:se s U s 0002.06)(-=2-5 解:)0()0()(3)(2)(2)(30100==+=+i i x y t x dtt dx t y dt t dy 将上式拉氏变换,得:2332)()()()32()()23()(3)(2)(2)(30000++=+=++=+S S S X S Y S X S S Y S S X S SX S Y S SY i i i i23-S 32-S Z p ==∴零点极点又当 时)(1)(t t x i =S S X i 1)(=SS S S X S X S Y S Y i i 12332)()()()(00⋅++=⋅= 3212332)()0(2312332)()(limlim lim lim 000000=⋅++⋅=⋅=∴=⋅++⋅=⋅=∞∴∞→∞→→→S S S S S Y S y S S S S S Y S y s s s s2-6 解:(a )传递函数:132123233321123233321232333211111H G G G H G G H G G G G H H G G H G G G G H G G H G G G G R C+++=⋅++⋅+++⋅=(b )传递函数:(c)传递函数:(d)传递函数:32121212211211H G G H H G G H G H G G G R C++++=2-7 解:通过方块图的变换,系统可等价为下图:2-8 解:2-9解:(a)(b)(c)(d)(e)(f)(g)2-10解:(a)(b)(c)2-11解:(a)(b)(c)(d)2-12解:(a)(b)2-13 解:(a)(b)2-14 解:2-15 解:(1(2)2-16解:2-17解:2-18解:以题可画出方块图如下:2-19 解:2-20 解:2-21 解:(1)(2、3、4)缺第三章3-1解:3-23-33-4解:3-53-6解:3-7 解:3-8 解:3-9 解:3-103-113-12 解:3-13 解:3-14解:3-153-163-17 解:3-183-193-203-21 解:3-223-23 解:3-243-25 解:3-26、3-27 缺3-28解:3-29、3-30 缺3-31解:3-32、3-33缺第四章4-1解:4-3 解:4-4 解:4-6解:(a)(b)(c)(d)(e)4-74-8、4-9 缺4-10解:4-11解:4-12解:4-16解:4-17 缺4-18解:4-19、4-20、4-21 缺第五章5-15-2、5-3、5-4 缺5-55-6 缺5-75-85-115-125-13 缺5-145-15 缺5-16解:5-17 缺5-18 5-19解:5-20 5-25解:5-26 缺附题:设单位反馈的开环传递函数为)10)(2()5.0(10)(2+++=S S S S K S G试用乃氏判据确定该系统在K=1和K=10时的稳定性。
控制工程基础习题解答2

控制工程基础习题解答第二章2-1.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(1).()()t t f 3cos 15-= 解:()[]()[]9553cos 152+-=-=s ss t L t f L (2). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t eL t f L t(3). ()⎪⎭⎫⎝⎛+=35sin πt t f 解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s st t L t L t f L π 2-2.试求下列函数的拉氏反变换。
(1).()()11+=s s s F解:()[]()⎥⎦⎤⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+=---11121111s k s k L s s L s F L()10111==⎥⎦⎤⎢⎣⎡+=s s s s k()()111112-=-=+⎥⎦⎤⎢⎣⎡+=s s s s k ()[]te s s L s F L ----=⎥⎦⎤⎢⎣⎡+-=111111 (2).()()()321+++=s s s s F解:()[]()()⎥⎦⎤⎢⎣⎡+++=⎥⎦⎤⎢⎣⎡+++=---3232121111s k s k L s s s L s F L()()()1223211-=-=+⎥⎦⎤⎢⎣⎡+++=s s s s s k ()()()2333212=-=+⎥⎦⎤⎢⎣⎡+++=s s s s s k ()[]tt e e s s L s F L 231123221-----=⎥⎦⎤⎢⎣⎡+++-= (3).()()()2222522+++++=s s s s s s F解:()[]()()⎥⎦⎤⎢⎣⎡+++++=⎥⎦⎤⎢⎣⎡+++++=---22222225232112211s s k s k s k L s s s s s L s F L()()()22222225221-=-=+⎥⎦⎤⎢⎣⎡+++++=s s s s s s s k ()()()3331331222222513223222232==-=---=-+---=++⎥⎦⎤⎢⎣⎡+++++=--=+k k jjjjk k k j s s s s s s s s j s k s k ()[]()()t e e s s s L s s s s L s F L tt cos 32111322223322221211-----+-=⎥⎦⎤⎢⎣⎡+++++-=⎥⎦⎤⎢⎣⎡+++++-=2-3.用拉氏变换法解下列微分方程(1)()()()()t t x dt t dx dtt x d 18622=++,其中()()00,10===t dt t dx x 解:对方程两边求拉氏变换,得:()()()()()()()()()()()()()()()()()[]()0,8747818747814242168616181618060042132132122222≥-+==-===++++=++++=++++==+-+-=+-+=-----t e e s X L t x k k k s k s k s k s s s s s s s s s s s X ss X s sX s s X s ss X x s sX t dt t dx sx s X s t t(2)()()210=+t x dtt dx ,其中()00=x 解:对方程两边求拉氏变换,得:()()()()()()()()()[]()0,515151511010221021001012121≥-==-==++=+==+=+---t e s X L t x k k s k s k s s s X s s X s sX ss X x s sX t(3)()()300100=+t x dtt dx ,其中()500=x 解:对方程两边求拉氏变换,得:()()()()()()()()()[]()0,4734731001003005030010050300100010012121≥+====++=++==+-=+---t e s X L t x k k s k s k s s s s X ss X s sX s s X x s sX t2-4.某系统微分方程为()()()()t x dtt dx t y dt t dy i i 322300+=+,已知()()0000==--i x y ,其极点和零点各是多少?解:对方程两边求拉氏变换,得:()()()()()()()()()()()233223323022030000-=-=++==+-=+-z p i i i i s s s s s X s Y s G s X x s sX s Y y s sY2-5.试求图2-25所示无源网络传递函数。
控制工程基础课后答案
第二章2.1求下列函数的拉氏变换 (1)s s s s F 232)(23++=(2)4310)(2+-=s s s F (3)1)(!)(+-=n a s n s F (4)36)2(6)(2++=s s F(5) 22222)()(a s a s s F +-= (6))14(21)(2s s s s F ++= (7)521)(+-=s s F 2.2 (1)由终值定理:10)(lim )(lim )(0===∞→∞→s t s sF t f f (2)11010)1(10)(+-=+=s s s s s F 由拉斯反变换:t e s F L t f ---==1010)]([)(1 所以 10)(lim =∞→t f t2.3(1)0)2()(lim )(lim )0(2=+===∞→→s ss sF t f f s t )0()0()()()](['2''0''f sf s F s dt e t f t f L st --==-+∞⎰)0()0()(lim )(lim'2''0f sf s F s dt e t f s st s --=+∞→-+∞+∞→⎰1)2()(lim )0(222'=+==+∞→s s s F s f s (2)2)2(1)(+=s s F , t te s F L t f 21)]([)(--==∴ ,0)0(2)(22'=-=--f te et f tt又,1)0('=∴f2.4解:dt e t f e t f L s F st s--⎰-==22)(11)]([)(⎰⎰------+-=2121021111dt e e dt e e sts sts)11(11)11(11222s s s s se s e s e e s s e -------+--=22)1(111s s e s e ---∙-=2.5求下列函数的拉氏反变换(1)t t f 2sin 21)(= (2)t e t t f -=361)((3)t t e e t f 32321)(+-=- (4)t t e e t f 235352)(+=-(5)t e t e t f t t 3sin 313cos 2)(22--+= (6)t t t e e te t f 222)(----+-=2.6(1)0)()()(22=--dtt y d m t ky t f(2)0)()()(222121=-+-dt t y d m t y k k k k t f2.7(1)14312)(23++++=s s s s s G(2)210)(22++=-s s e s G s2.8 解 水的流量Q1由调节控制阀的开度控制,流出量Q2则根据需要可通过负载阀来改变,被调量H 反映了。
控制工程基础第2章答案.
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-C)(t u r )(t u c )(t r )(t x c f1k 2k CR)(t u r )(u c +-+-f)(t r )(t x c )(a )(b )(c )(d R 2R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-C)(t u r )(t u c )(t r )(t x c f1k 2k CR)(t u r )(u c +-+-f)(t r )(t x c )(a )(b )(c )(d R 2R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
四个系统均为一阶系统。
2.5试求下图(题图2.5)所示各电路的传递函数。
)(t +_1R ++__u )1R ++u )__)(a ++__C u ))(b )(c )(d题图2.5【解】:可利用复阻抗的概念及其分压定理直接求传递函数。
(a)1212212222212)()(1//)1(//)1()()(R s L C R R LCs R R s LCR R CsR Ls R Cs R LsR Cs s U s U r c ++++=+⨯+++= (b)1)(1)(1)1//(1//1)()(21221122121221122121221111+++++++=++-=s C R C R C R s C C R R s C R C R s C C R R sC R s C R sC R s U s U r c (c) 2121212212)()//(1)//(1)()(R R s L C R R LCs R Ls R Ls R CsR Ls R Cs s U s U r c +++++=+++= (d)sC R Rs C R s C R R sC R s C R s C R sC s U s U r c 121121211//)1(//)1(1//)1(1)()(+⨯++++++=1)2(1221221212212+++++=s RC RC s C C R s RC s C C R2.6求图( 题图2.6) 所示两系统的微分方程。
题图2.6解(1)对图(a )所示系统,由牛顿定律有即(2)对图(b )所示系统,由牛顿定律有其中2.7 求图( 题图2.7) 所示机械系统的微分方程。
图中M为输入转矩,C m为圆周阻尼,J 为转动惯量。
圆周半径为R,设系统输入为M(即M(t)),输出为(即),题图2.7解:分别对圆盘和质块进行动力学分析,列写动力学方程如下:消除中间变量x,即可得到系统动力学方程+k(c)2.8 求图( 题图2.8) 所示系统的传递函数(f(t)为输入,y2(t)为输出)。
解分别对,进行受力分析,列写其动力学方程有对上两式分别进行拉氏变换有消除得2.9 若系统传递函数方框图如图(题图2.9) 所示, 求:(1) 以R(s)为输入,当N(s) = 0 时,分别以C(s),Y(s),B(s),E(s) 为输出的闭环传递函数。
(2) 以N(s)为输入,当R(s) = 0 时,分别以C(s),Y(s),B(s),E(s) 为输出的闭环传递函数。
(3) 比较以上各传递函数的分母,从中可以得出什么结论。
题图2.8 题图2.9解(1)以为输入,当N()=0时:若以C()为输出,有若以Y ()为输出,有若以B ()为输出,有若以E ()为输出,有(2)以为输入,当R()=0时:若以C ()为输出,有若以Y ()为输出,有若以B ()为输出,有若以E ()为输出,有(3)从上可知:对于同一个闭环系统,当输入的取法不同时,前向通道的传递函数不同,反馈回路的传递函数不同,系统的传递函数也不同,但系统的传递函数分母保持不变,这是因为这一分母反映了系统的固有特性,而与外界无关。
2.10 求出图( 题图2 .10) 所示系统的传递函数)(/)(S X S X i o 。
题图2.10G 1G 2G 3G 4H 1H 3G 4H 3H 4G 4-+--X 0(s)-G 1G 2G 4H 1H 3 -H 3G 4---Xi(s)X 0(s)G 31+G 3G 4H 4-G 4H 3 -H 3G 4-Xi(s)X 0(s)G 1G 2G 31+G 3G 4H 4-G 2G 3H 3-解方法一:利用公式(2.3.1),可得方法二:利用方框图简化规则,有图(题2.16.b )2.11 求出图( 题图2 .11) 所示系统的传递函数)(/)(S X S X i o 。
解根据方框图简化的规则,有图(题2.17.b )题图2.11H 3+Xi(s)X 0(s)G 4+G 4+-G 4G 1G 3G 5H 3-Xi(s)X 0(s)G 4+G 1G 2G 3G 1G 2G 3G 1G 2G 31+G 1G 2G 3H 3H 42.12 图(题图2 .12) 所示为一个单轮汽车支撑系统的简化模型。
1m 代表汽车质量,B 代表振动阻尼器,1K 为弹簧,2m 为轮子的质量,2K 为轮胎的弹性,试建立系统的数学模型。
题图2.12问题2 质点振动系统。
这是一个单轮汽车支撑系统的简化模型。
代表汽车质量,B 代表振动阻尼器,为弹簧,为轮子的质量,为轮胎的弹性,建立质点平移系统数学模型。
解答:拉氏变换:2.13 液压阻尼器原理如图(题图2.13)所示。
其中,弹簧与活塞刚性联接,忽略运动件的惯性力,且设i x 为输入位移,o x 为输出位移,k 弹簧刚度,c 为粘性阻尼系数,求输出与输入之间的传递函数。
X 0X tk题图2.13解:1)求系统的传递函数 活塞的力平衡方程式为)]()([)(t x t x dtdct kx o i o -= 经拉氏变换后有)]()([)(s X s X cs s kX o i o -=解得传递函数为1)()()(+==Ts Tss X s X s G i o 式中,RC T =为时间常数。
2.14 由运算放大器组成的控制系统模拟电路图如图(题图2.14)所示,试求闭环传递函数)(/)(s U s U r cR 0R 1— K — K — KC 1C 2R 0R 0R 0R 2uU题图2.14解:式(1)(2)(3)左右两边分别相乘得即所以:2.15 某位置随动系统原理方块图如图(题图 2.15)所示。
已知电位器最大工作角度0max 330=θ,功率放大级放大系数为3K ,要求:(1) 分别求出电位器传递系数0K 、第一级和第二级放大器的比例系数1K 和2K ; (2) 画出系统结构图;(3) 简化结构图,求系统传递函数)(/)(s s i o θθ;10k+SMTG30k20k10k— K 1— K 2+15V-15V+15V -15VK 0θ10k10k功放K 3K 0θ+题图2.15 位置随动系统原理图解: (1)=3=2(2)系统结构图如下:(3)系统传递函数2.16 设直流电动机双闭环调速系统的原理图如图(题图2.16)所示,要求: (1)分别求速度调节器和电流调节器的传递函数;(2)画出系统结构图(设可控电路传递函数为)1/(32+s K τ;电流互感器和测速发电机的传递函数分别为4K 和5K );(3)简化系统结构图,求系统传递函数)(/)(s U s i Ω。
RC 1+—负载SMTGU iRR 1R 2RRC 2— K— KU a速度调节器电流调节器电流互感器晶闸管电路扼流圈ωU f题图2.16 直流电动机调速系统原理图解:(1)速调流调(2)系统结构图如下(3)简化结构图,求系统传递函数因为求系统传递函数,所以令,系统结构图如下:所以:。