控制工程基础第3版-课后答案解析
控制工程基础第三版习题答案_清华大学出版社

第二章2-1 解:(1): )](12[)](1[)](5[)]()4[()(t L t t L t L t t L S F ⋅+⋅++=δδ SS S S 215215022++=+++= (2): )25(253)(2++=s s S F (3): 11)(2++=-s e S F sπ(4): )}(1)6(1)]6(2cos 4{[)(5t e t t L S F t ⋅+-⋅-=-ππ5144512426226+++=+++=--S s Se S s Se ss ππ(5): Se S e S F ss 226600)(--+=+++= (6): )]4(1)90453cos(6[)(π-⋅--=t t L S F9636)]4(1)4(3cos 6[24224+=+=-⋅-=--S SeS Se t t L S Sππππ(7): )](18sin 25.0)(18cos [)(66t t e t t e L S F t t ⋅+⋅=--1001288)6(28)6(622222+++=++++++=S S S S S S (8): 99)20(52022)(262++++++=-s es s S F s π2-2解:(1): )(1)2()3221()(321t e e S S L t f t t ⋅+-=+++-=--- (2): )(12sin 21)(t t t f ⋅=(3): )(1)2sin 212(cos )(t t t e t f t ⋅+=(4): )1(1)1()(11-⋅=-=---t e S e L t f t s(5): )(1)22()(2t e e te t f t t t ⋅-+-=---(6): )(1215sin 15158))215()21(21515158()(2221t t e S L t f t⋅=++⋅=-- (7): )(1)3sin 313(cos )(t t t t f ⋅+=2-3 解:(1) 对原方程取拉氏变换,得:SS X x S SX x Sx S X S 1)(8)]0()([6)0()0()(2=+-+--⋅∙ 将初始条件代入,得:61)()86(1)(86)(6)(22++=++=+-+-S SS X S S SS X S SX S S X S48724781)86(16)(22+-++=++++=S S S S S S S S S X 取拉氏反变换,得:t t e e t x 42874781)(---+=(2) 当t=0时,将初始条件50)0(=∙x 代入方程,得:50+100x(0)=300 则x(0)=2.5对原方程取拉氏变换,得: sx(s)-x(0)+100x(s)=300/s 将x(0)=2.5代入,得:S300100X(S)2.5-SX(S)=+1005.03100)S(S 3002.5S X(S)+-=++=s s取拉氏反变换,得:-100t 0.5e -3x(t)=2-4解:该曲线表示的函数为:)0002.0(16)(-⋅=t t u则其拉氏变换为:se s U s 0002.06)(-=2-5 解:)0()0()(3)(2)(2)(30100==+=+i i x y t x dtt dx t y dt t dy 将上式拉氏变换,得:2332)()()()32()()23()(3)(2)(2)(30000++=+=++=+S S S X S Y S X S S Y S S X S SX S Y S SY i i i i23-S 32-S Z p ==∴零点极点又当 时)(1)(t t x i =S S X i 1)(=SS S S X S X S Y S Y i i 12332)()()()(00⋅++=⋅= 3212332)()0(2312332)()(limlim lim lim 000000=⋅++⋅=⋅=∴=⋅++⋅=⋅=∞∴∞→∞→→→S S S S S Y S y S S S S S Y S y s s s s2-6 解:(a )传递函数:132123233321123233321232333211111H G G G H G G H G G G G H H G G H G G G G H G G H G G G G R C+++=⋅++⋅+++⋅=(b )传递函数:(c)传递函数:(d)传递函数:32121212211211H G G H H G G H G H G G G R C++++=2-7 解:通过方块图的变换,系统可等价为下图:2-8 解:2-9解:(a)(b)(c)(d)(e)(f)(g)2-10解:(a)(b)(c)2-11解:(a)(b)(c)(d)2-12解:(a)(b)2-13 解:(a)(b)2-14 解:2-15 解:(1(2)2-16解:2-17解:2-18解:以题可画出方块图如下:2-19 解:2-20 解:2-21 解:(1)(2、3、4)缺第三章3-1解:3-23-33-4解:3-53-6解:3-7 解:3-8 解:3-9 解:3-103-113-12 解:3-13 解:3-14解:3-153-163-17 解:3-183-193-203-21 解:3-223-23 解:3-243-25 解:3-26、3-27 缺3-28解:3-29、3-30 缺3-31解:3-32、3-33缺第四章4-1解:4-3 解:4-4 解:4-6解:(a)(b)(c)(d)(e)4-74-8、4-9 缺4-10解:4-11解:4-12解:4-16解:4-17 缺4-18解:4-19、4-20、4-21 缺第五章5-15-2、5-3、5-4 缺5-55-6 缺5-75-85-115-125-13 缺5-145-15 缺5-16解:5-17 缺5-18 5-19解:5-20 5-25解:5-26 缺附题:设单位反馈的开环传递函数为)10)(2()5.0(10)(2+++=S S S S K S G试用乃氏判据确定该系统在K=1和K=10时的稳定性。
控制工程基础第三版课后答案 董景新 赵长德等

+
- 偏差
信号 e
+
-
换元件
信号 xi
典型的反馈控制系统框图
1-5.反馈控制原理是什么?
反馈控制的基本原理可简单的表述为: a) 测量、反馈:由传感器检测系统的输出变化,通过反馈回路将此信号的部分或全部 反馈到输入端。 b) 求偏差:将反馈回来的信号和输入信号进行比较,可得它们之间的偏差大小,即实 际输出值与给定值的偏差。 c) 纠正偏差:根据偏差的大小和方向对系统进行控制,以改变系统的输出,使偏差减 小的过程。 经过以上三个过程,最终使系统的输出满足要求。
解: L
−1
[F (s )] = L−1 ⎡ ⎢
⎡ ⎤ s +1 k1 = ⎢ ⎥ (s + 2 ) s = −2 = −1 ⎣ (s + 2 )(s + 3) ⎦ ⎡ ⎤ s +1 k2 = ⎢ ⎥ (s + 3) s = −3 = 2 ⎣ (s + 2 )(s + 3)⎦
1 2 ⎤ ⎡ L−1 [F (s )] = L−1 ⎢− + = 2e −3t − e − 2t ⎥ ⎣ s + 2 s + 3⎦
2-3.用拉氏变换法解下列微分方程
(1)
dx(t ) d 2 x(t ) dx(t ) +6 + 8 x(t ) = 1(t ) ,其中 x(0 ) = 1, =0 2 dt dt t = 0 dt
解:对方程两边求拉氏变换,得:
dx(t ) 1 + 6(sX (s ) − x(0 )) + 8 X (s ) = dt t = 0 s 1 s 2 X (s ) − s + 6(sX (s ) − 1) + 8 X (s ) = s 2 2 k k k s + 6s + 1 s + 6s + 1 X (s ) = = = 1+ 2 + 3 2 s s + 6 s + 8 s (s + 2 )(s + 4 ) s s + 2 s + 4 1 k1 = 8 7 k2 = 4 7 k3 = − 8 1 7 7 x(t ) = L−1 [ X (s )] = + e − 2t − e − 4t , (t ≥ 0 ) 8 4 8 dx(t ) (2) + 10 x(t ) = 2 ,其中 x(0 ) = 0 dt s 2 X (s ) − sx(0 ) −
控制工程基础第三版课后答案 (3)

控制工程基础第三版课后答案第一章1.1 分析控制系统的对象控制系统的对象通常指的是待控制的物理系统或过程。
在分析控制系统对象时,首先需要了解系统的动态特性。
为了分析控制系统的特性,我们可以通过选取一个合适的数学模型来描述物理系统的动态行为。
一种常用的方法是通过微分方程来描述系统的动态特性。
例如,对于一个简单的电路系统,可以使用基尔霍夫电流定律和基尔霍夫电压定律来建立描述电路中电流和电压之间关系的微分方程。
然后,通过求解这个微分方程,我们可以得到系统的传递函数。
另外,我们还可以使用频域分析的方法来分析控制系统的对象。
通过对信号的频谱进行分析,我们可以得到系统的频率响应。
1.2 常见的控制系统对象控制系统的对象存在各种各样的形式,下面列举了一些常见的控制系统对象:•机械系统:例如机器人、汽车悬挂系统等。
•电气系统:例如电路、电机等。
•热力系统:例如锅炉、冷却系统等。
•化工系统:例如反应器、蒸馏塔等。
针对不同的控制系统对象,我们需要选择合适的数学模型来描述其动态特性,并进一步分析系统的稳定性、性能等指标。
第二章2.1 控制系统的数学模型控制系统的数学模型描述了物理系统的动态特性和输入与输出之间的关系。
常见的控制系统数学模型包括:•模型中几何图形法:通过几何图形来描述系统的动态特性。
•传递函数法:采用以系统输入和输出的转移函数来描述系统的动态特性。
•状态方程法:将系统的状态变量与输入变量和输出变量之间的关系用一组偏微分方程或代数方程来描述。
在使用这些模型时,我们可以选择合适的数学工具进行分析和求解,例如微积分、线性代数等。
2.2 传递函数的定义和性质传递函数是描述控制系统输入输出关系的数学函数,通常用G(s)表示。
传递函数的定义和性质如下:•定义:传递函数G(s)是系统输出Y(s)和输入U(s)之间的比值,即G(s) = Y(s)/U(s)。
•零点和极点:传递函数可以有零点和极点,零点是使得传递函数为零的s值,极点是使得传递函数为无穷大的s值。
控制工程基础第三版课后答案__董景新_赵长德等

1-3.何谓开环控制与闭环控制?
开环控制: 系统的输出端和输入端之间不存在反馈回路, 输出量对系统的控制作用没有 影响。系统特点:系统简单,容易建造、一般不存在稳定性问题,精度低、抗干扰能力差。 闭环控制:系统的输出端和输入端存在反馈回路,输出量对控制作用有直接影响。闭环 的反馈有正反馈和负反馈两种, 一般自动控制系统均采用负反馈系统, 闭环控制系统的特点: 精度高、抗干扰能力强、系统复杂,容易引起振荡。
解: L
−1
[F (s )] = L−1 ⎡ ⎢
本页已使用福昕阅读器进行编辑。 福昕软件(C)2005-2007,版权所有, 仅供试用。
⎡ ⎤ s +1 k1 = ⎢ ⎥ (s + 2 ) s = −2 = −1 ⎣ (s + 2 )(s + 3) ⎦ ⎡ ⎤ s +1 k2 = ⎢ ⎥ (s + 3) s = −3 = 2 ⎣ (s + 2 )(s + 3)⎦
(
)(
)
k3 = 3 ⎡ 2 3s + 3 ⎤ 2 3(s + 1) ⎤ ⎡ −1 − 2t −t L−1 [F (s )] = L−1 ⎢− + 2 = L − + ⎢ ⎥ = −2e + 3e cos t 2 ⎥ ⎣ s + 2 s + 2s + 2 ⎦ ⎣ s + 2 (s + 1) + 1⎦
1-7.试述对控制系统的基本要求。
控制系统的基本要求可由稳、准、快三个字来描述。 1. 稳即稳定性:由于系统存在惯性,当系统的各个参数匹配不妥时,将会引起系统的 振荡而失去工作能力。稳定性是系统工作的首要条件。 2. 准即准确性:输出量与给定量之间的偏差,随时间变化的程度,称动态精度偏差; 调整过程结束后的偏差,称静态精度偏差。 3. 快即快速性:在系统稳定的前提下,消除偏差过程的快速程度。
控制工程基础第三版机械工业课后答案

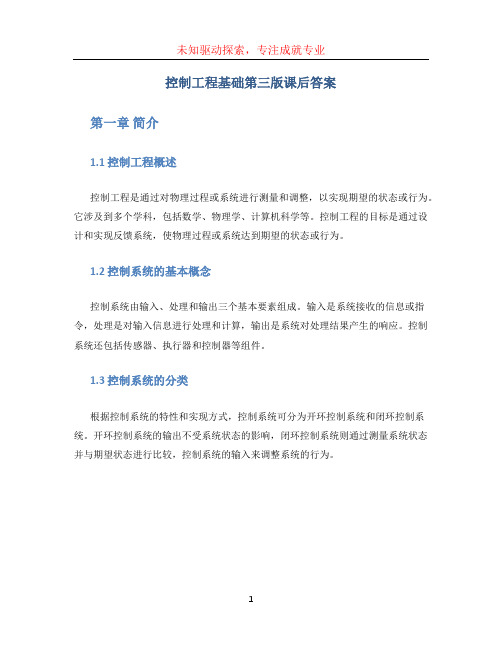
控制工程基础习题解答第一章1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
图1-10 题1-5图由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
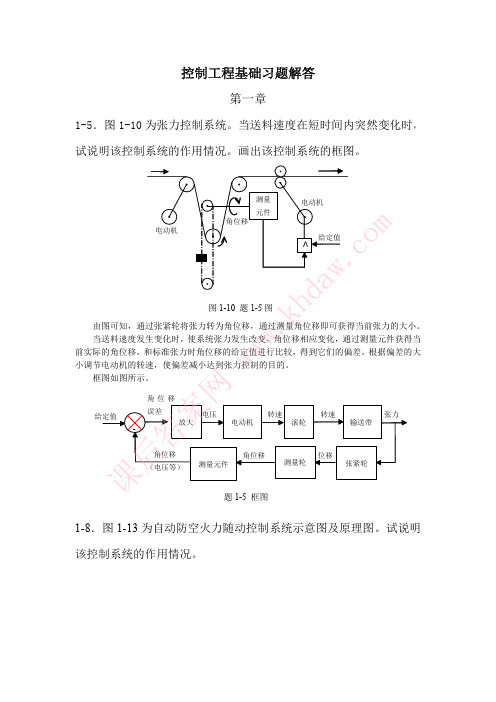
角位移题1-5 框图1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答第二章2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3).()t e t f t 10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t e L t f Lt(5).()⎪⎭⎫ ⎝⎛+=35sin πt t f图1-13 题1-8图敏感元件解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s st t L t L t f Lπ2-6.试求下列函数的拉氏反变换。
控制工程基础第三版课后答案
控制工程基础第三版课后答案第一章简介1.1 控制工程概述控制工程是通过对物理过程或系统进行测量和调整,以实现期望的状态或行为。
它涉及到多个学科,包括数学、物理学、计算机科学等。
控制工程的目标是通过设计和实现反馈系统,使物理过程或系统达到期望的状态或行为。
1.2 控制系统的基本概念控制系统由输入、处理和输出三个基本要素组成。
输入是系统接收的信息或指令,处理是对输入信息进行处理和计算,输出是系统对处理结果产生的响应。
控制系统还包括传感器、执行器和控制器等组件。
1.3 控制系统的分类根据控制系统的特性和实现方式,控制系统可分为开环控制系统和闭环控制系统。
开环控制系统的输出不受系统状态的影响,闭环控制系统则通过测量系统状态并与期望状态进行比较,控制系统的输入来调整系统的行为。
第二章数学基础2.1 线性代数线性代数是控制工程的基础,它涉及到向量、矩阵、线性方程组等概念和运算。
控制系统的建模和分析中经常使用线性代数的方法进行求解和分析。
2.2 微积分微积分是控制工程的另一个基础,它涉及到函数、极限、导数和积分等概念和运算。
控制系统的建模和分析中经常使用微积分的方法进行求解和分析。
2.3 概率统计概率统计是控制工程中用来描述不确定性和随机性的工具。
控制系统的建模和分析中经常使用概率统计的方法进行不确定性的建模和分析。
第三章控制系统的数学表示3.1 传递函数表示法传递函数是描述控制系统输入和输出关系的一种表示方法。
传递函数可以通过对系统进行建模和实验来获得。
3.2 状态空间表示法状态空间表示是描述控制系统状态和动力学行为的一种表示方法。
状态空间表示可以通过系统的状态方程和输出方程来获得。
第四章控制系统的分析方法4.1 频域分析频域分析是通过对控制系统的输入和输出信号进行频率分析来获得系统的频率响应和稳定性等性能指标。
4.2 时域分析时域分析是通过对控制系统的输入和输出信号进行时域分析来获得系统的时域响应和稳定性等性能指标。
燕山大学 控制工程基础_第三版_机械工业出版社_课后答案
指挥仪
伺服机构(控制仰角) 伺服机构(控制 绕垂直轴转动)
方向
误差
敏感 元件
视线
w.
误差
目标
跟踪 计算机 指挥仪
co
定位伺 服机构 (方位 和仰角) 瞄准环路
火炮瞄准 命令
瞄准
跟踪环路
图 1-13 题 1-8 图
控制工程基础习题解答 第二章 2-2.试求下列函数的拉氏变换,假定当 t<0 时,f(t)=0。 (3). f (t ) = e
2-17.组合机车动力滑台铣平面时,当切削力 Fi(t)变化时,滑台可能产生振动,从而降 低被加工工件的切削表面质量。可将动力滑台连同铣刀抽象成如图所示的质量-弹簧-阻尼系 统的力学模型。其中 m 为受控质量,k1,k2 分别为 x0(t) x1(t) 铣刀系统,x0(t)为输出位移。试建立数学模型。 解:微分方程为: k1 k2 Fi(t) ̇1 (t ) Fi (t ) − k 2 ( x1 (t ) − x0 (t )) = ṁ x m
课 后
答
s 2 − 2s + 5
案
s
网
ww w.
U 0 (s ) 。 U i (s )
kh da
⎡ ⎤ 2 s 2 + 5s + 2 k 2 s + k3 =⎢ s + 2s + 2 2 s = −1 − j ⎣ (s + 2 ) s + 2 s + 2 ⎥ s = −1 − j ⎦ −3−3j − k 2 + k 3 − jk 2 = = −3 j 1− j k2 = 3
2
f
k1
+
-
1 J1s 2
θ0(s)
控制工程基础第三版课后答案__董景新_赵长德等
+
- 偏差
信号 e
+
-
换元件
信号 xi
典型的反馈控制系统框图
1-5.反馈控制原理是什么?
反馈控制的基本原理可简单的表述为: a) 测量、反馈:由传感器检测系统的输出变化,通过反馈回路将此信号的部分或全部 反馈到输入端。 b) 求偏差:将反馈回来的信号和输入信号进行比较,可得它们之间的偏差大小,即实 际输出值与给定值的偏差。 c) 纠正偏差:根据偏差的大小和方向对系统进行控制,以改变系统的输出,使偏差减 小的过程。 经过以上三个过程,最终使系统的输出满足要求。
1-2.试述控制系统的工作原理。
控制系统就是使系统中的某些参量能按照要求保持恒定或按一定规律变化。 它可分为人 工控制系统(一般为开环控制系统)和自动控制系统(反馈控制系统) 。人工控制系统就是 由人来对参量进行控制和调整的系统。 自动控制系统就是能根据要求自动控制和调整参量的 系统,系统在受到干扰时还能自动保持正确的输出。它们的基本工作原理就是测量输出、求 出偏差、再用偏差去纠正偏差。
−0.5t
解: L[ f (t )] = L e
[
cos10t =
]
s + 0.5 (s + 0.5)2 + 100
(3). f (t ) = sin ⎜ 5t +
⎛ ⎝
π⎞
⎟ 3⎠
解: L[ f (t )] = L ⎢sin ⎜ 5t +
⎡ ⎣
⎛ ⎝
π ⎞⎤
⎡1 ⎤ 3 5 + 3s cos 5t ⎥ = ⎟⎥ = L ⎢ sin 5t + 2 3 ⎠⎦ 2 ⎣2 ⎦ 2 s + 25
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f (t) ?
6 si
?4
n[ 3 ( t ?
)?
?
4
]?1
(t
4
?
6
cos[
3 ( t ? ? )] ? 1 ( t ? ? )
4
4
?
由延时定理可得:L[ f (t )] ? 6 ? s
?? s
?e 4
?
?s
6 se 4
s2 ? 9
s2 ? 9
2-1(7) 解
f (t ) ? e ? 6 t (cos 8 t ? 0 .25 sin 8 t ) ?1(t )
F (s) ?
?1 ( s ? 1) 2
?
2? s?1
?2 s? 2
f (t ) ? (? t ?e? t ? 2e? t ? 2e?2t ) ?1(t )
2-2(6)
F (s) ?
s2
4 ? s?
4
解: F ( s ) ?
4
8 15 ? 15
?
15
2
( s ? 1 ) 2 ? 15
2
4
( s ? 1 ) 2 ? ( 15 ) 2
? ? ? L[ f ( t )] ? 15 L[ t 2 ( t )] ? 4 L [ t ( t )] ? 6 L[ ( t )] ? L[ 1( t ? 2 )]
? 0 ? 0 ? 6 ? e?2s
2-1(6)
? ? s
f ( t ) ? 6 sin( 3 t ? ) ? 1 ( t ? )
解:由
Xi (s ) 1 ? (G2G3 ? G4 )(G1 ? H 2 ) ? G1G 2 H 1
(C)
Xo (s) Xi (s)
?
1?
G1G 2G3 G 2G 3 H 2 ? G 2 H 1 (1 ?
G1 )
?
G4
Xo1(s) ?
G1G2G3 (1 ? G4 )
Xi1 (s) 1 ? G1G2 ? G4 ? G1G4G5H1H 2 ? G1G2G4
? ? ? f (t) ? e?20t (2 ? 5t) ?1(t) ? (7t ? 2) (t) ? [3sin(3t ? )]?1(t ? )
? ? ? ? 解
2
6
? 2?e?20t ?1(t) ? 5t ?e?20t ?1(t) ? 7t ? (t) ? 2? (t) ? 3sin3[ (t ? )]?1(t ? )
Ds ( x 2 ? x o ) ? k 2 x o
x2 ?
Ds ? k 2 Ds
xo
k1 x1 ?
k 1 Ds ? k 1 k 2 Ds
xo
?
k2 xo
( k 1 Ds ? k 2 Ds ? k 1 k 2 ) x o ? k 1 Dsx i
Xo(s) ?
k1 Ds
X i ( s ) ( k1 ? k 2 ) Ds ? k1k 2
2-10(a) 试求题图2-10(a) 所示无源电路网络传递函数。
解:?? u i ( t ) ? i ( t ) R1 ? u o ( t )
? ?
?? u o
(t)
?
1 c
i ( t ) dt ? i ( t ) R 2
对方程式进行拉氏变换得:
??U i ( s ) ? I ( s ) R1 ? U O ( s )
同理可推得:
Xo1(s) ?
G1G2G3(1? G4 )
Xi1(s) 1? G1G2 ? G4 ? G1G4G5H1H2 ? G1G2G4
Xo1(s) ?
G1G2G3G4G5H1
Xi2(s) 1? G1G2 ? G4 ? G1G4G5H1H2 ? G1G2G4
Xo2(s) ?
G4G5G6(1? G1G2)
6
6
L [ f ( t )] ?
2 s ? 20
?
5? (s
1 ? 20
)2
?
0
?
2
?
?? s
3e 6
?
s
2
3 ?
9
?? s
? 2?
2 s ? 20
?
5
?
( s ? 20 ) 2
9e 6 s2 ? 9
2-2 试求下列函数的拉氏反变换
2-2(5)
F (s) ?
(s ?
s 2)( s ? 1) 2
解:展开F(s)得:
?? ? ?
U A(s) R2
?
U
A(s) ? U o (s) R4
?
U
A (s) 1
?
Cs
消去 U A(s) ,得:
U o (s) U i(s)
?
?
R2 ? R4 R1
????
R2 R4 R2 ? R4
Cs
? 1 ????
、
2-12(b)
列写机械系统的方程组: 其中 ? A ( t ) T1(t) 分别为 J 1 所在杆的转角和转矩, T2 (t) 为 J 2 所在杆的转矩。
Xi2(s) 1? G1G2 ? G4 ? G1G4G5H1H2 ? G1G2G4
2—9试求题图2~9所示机械系统的传递函数。
k 1 ( x i ? x 2 ) ? D ( x 2? ? x o? ) D ( x 2? ? x o? ) ? k 2 x o
k 1 ( x i ? x 2 ) ? Ds ( x 2 ? x o )
? ?? U
O
(s)
?
1 Cs
I (s) ?
I (s)R2
U o (s) ? R2Cs ? 1
消去I(s),得:U i (s) ( R1 ? R2 )Cs ? 1
2-11(c)求所示有源电路网络的传递函数
选取电容C上端电压为 u A , 则其拉式变换方程为:
?U i(s)
? ?
R1
?
? U A(s) R2
2
2
f (t) ? 8
15
?t
e2
sin
15 t ?1(t )
15
2
2-2(7)
F (s) ?
s?1 s2 ? 9
解:
F (s) ?
s s2 ? 32
?
1?3 3 s2 ? 32
f ( t ) ? (cos 3 t ? 1 si 3nt ) ? 1 ( t ) 3
2-6(b)
Xo (s) ?
G1 (G 2G3 ? G 4 )
自控理论作业解答
《控制工程基础》第 3版
董景新等编
第二章 习题
? 2-1 试求下列函数的拉氏变换
? ? 2-1(5) f ( t ) ? 15 t 2 ? 4 t ? 6 ( t ) ? 1 ( t ? 2 )
解:由 L [ af ( t )] ? aF ( s )
? f ( t ) ( t ) ? f ( 0 )
f (t ) ? e ?6t ?cos 8t ?1(t) ? 0.25e ?6t ?si 8t ?1n(t)
L[ f (t)] ? L[ e?6t ?cos 8t ?1(t)] ? L[0.25e?6t ?sin 8t ?1(t)
2-1(8)
? s?6 ? 1? 8
? s?8
(s ? 6)2 ? 82 4 (s ? 6)2 ? 82 s2 ? 12s ? 100