全站仪后方交会测量
全站仪高程及后方交会法要点

“待测点高度仪器读数0.5m”不知是不是指待测点与设站点之间的高差。
假设设站点A,待测点B,则HA+h=HB+i(棱镜高)-d高差即实际高度是:HA+h-i+d高差=1.43+0.5-1.2=0.73M其中HA+h是指视线高,即你所说的仪器高度1.43m。
不过我还是对你的描述有些不解!A是全站仪的点B是棱镜的点HB=HA+1.43+所测斜距*COS天顶距-1.2 如果你正常设站测坐标的话直接测出来的读书就是B点高程输入建站点的坐标和高程,测量出建站点到全站仪的垂直高度,输入到仪器高里面,再输入棱镜高。
后视完,就可以测量了,一般全站仪上有个三角型按钮代表测量距离(平距HD,斜距SD)和高程(高程Z高差VD)。
根据楼层高程和测量的高程差,就可以算出实际差了。
方法一:架设C为已知高程点Hc,B为未知高程点,高程记为Hb将全站仪架设在C点精确对中整平,用钢卷尺量取仪器高度记为i,在B点架设棱镜精确对中整平,量取棱镜高度记为v,用全站仪望远镜精确照准棱镜中心,按下测距按键,得出AB水平距离D,读出竖盘读数A,则可得到B点高程:Hb=Hc+DTanA+i-v方法二:采用全站仪三维坐标测量程序功能将全站仪架设在已知高程点C,将棱镜架设在另一已知高程点B在全站仪的功能里面找到:三维坐标测量或者是直角坐标测量然后进入1.建站,按照仪器提示,输入仪器架设的点C的所有已知数据(如果仅已知高程,那就把其他需要输入的项全部架设,仪器高必须用卷尺量取,并真实输入)2.定向,将全站仪望远镜瞄准另一已知高程点B,输入B点所有已知数据后,按确认键完成。
(如果仅已知高程,那就把其他需要输入的项全部架设,棱镜高必须用卷尺量取,并真实输入)3.照准其他任何你想要测量高程的点按测量键,仪器就会显示该待测点的坐标和高程(如果前面建站和定向都用的假设坐标,此处得到的坐标当然也是假定的,但是高程是完全正确的)先输入测站点的高程,再量取仪器高,并输入全站仪中,最后再输入待测点处棱镜杆的高度,然后用全站仪瞄准棱镜中心,点击测量即可。
拓普康全站仪后方交会测量操作

.
6
点击[增加],输入已知点(注意要选中控制点)
点击[确定],一个新的已知点输 入完成
重复以上步骤输入所有参与 后方交会的已知点的坐标。
.
7
示例:一个简单后方交会的示意图
3 4
7(测站点)
在后面的操作中,我们假设3号点和4号点的三维坐标已知, 需要通过后方交会观测求解测站点7的坐标。
.
8
4. 进入后方交会界面(两种方式) (一)由菜单直接进入
钮。
.
13
弹出如下所示的下拉菜单:
选择[后方交会]菜单项,进入后视定向界面
.
14
6. 进行后方交会设置
后方交会测量界面如下图所示:
.
15
点击该按钮弹出一下拉菜单,
.16Leabharlann 选中[选项]菜单项,.
17
进入后方交会设置界面,如图所示设置好各个选项, ➢交会类型:三维; ✓启用[估算尺度比]选项; ✓启用[使用计算的比例因子]选项;
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
.
9
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
.
10
4. 进入后视定向界面 (二)由测站设置界面进入
用触笔点击[测量],出现如下下拉菜单:
.
11
点击[测站设置],弹出后视定向的设置页面
.
12
在后视测量界面 用触笔点击该按
TopSURV后方交会测量操作入门
养护公司 王玉博
1. 开机,运行TopSURV软件
按[POWER]键,开机,等待片刻,进入如下界面。 该系列全站仪操作系统是,和计算机的 Windows操作系统基本相同,一切可以按照操作 Windows的步骤来进行。
拓普康全站仪后方交会测量操作

点击[后方交会],
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
4. 进入后视定向界面 (二)由测站设置界面进入
用触笔点击[测量],出现如下下拉菜单:
点击[测站设置],弹出后视定向的设置页面
在后视测量界面 用触笔点击该按
TopSURV后方交会测量操作入门
养护公司 王玉博
1. 开机,运行TopSURV软件
按[POWER]键,开机,等待片刻,进入如下界面。 该系列全站仪操作系统是,和计算机的 Windows操作系统基本相同,一切可以按照操作 Windows的步骤来进行。
双击桌面上TopSURV图标,打开TopSURV软件:
钮。
弹出如下所示的下拉菜单: 选择[后方交会]菜单项,进入后视定向界面
6. 进行后方交会设置
后方交会测量界面如下图所示:
点击该按钮弹出一下拉菜单,
选中[选项]菜单项,
进入后方交会设置界面,如图所示设置好各个选项, ➢交会类型:三维; ✓启用[估算尺度比]选项; ✓启用使用计算的比例因子]选项;
8.查看观测结果集并进行后方交会计算
参与后方交会的已知点全部观测完毕以后,点击[观测集] 切换到观测结果列表。
1
查看残差/标准差/比例因子(图 1,2,3),如果观测误差可以 接受,点击[采用]按钮,即进行 后方交会计算。
2
3
9.保存后方交会结果
点击[采用]后,计算结果显示如下:
示例:测站点保存为7号点 输入点号,然后点击[确定],即可保存 后方交会结果。
稍后进入TopSURV作业操作,界面如下图:
2. 创建一个新作业/或者打开已存在的作业
全站仪后方交会法步骤和高程测量步骤

、角度测量(angle observation)1 (1)功能:可进行水平角、竖直角的测量。
AOB ,则:(2)方法:与经纬仪相同,若要测出水平角∠1)当精度要求不高时:HR 的大小。
瞄准 B 点,记下水平度盘瞄准 A 点——置零(0 SET )——)。
——可用测回法(method of observation set 2)当精度要求高时:)。
”(H SET 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘distance measurement )2、距离测量(测距、测坐标、放样前。
PPM 的设置——PSM 、PSM )的设置。
1)棱镜常数((国产棱镜)PRISM=0 (原配棱镜),-30mm 一般:(乘常数)的设置。
)大气改正数(PPM )2 PPM 的值。
PRESS ),或经计算后,输入输入测量时的气温(TEMP )、气压((全站仪镜点至棱镜镜点间高差及斜SD VD 和斜距1()功能:可测量平距HD 、高差距))。
(MEAS (2)方法:照准棱镜点,按“测量”coordinate measurement )3、坐标测量(。
H )X ,Y ,1()功能:可测量目标点的三维坐标((2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
全站仪后方交会法步骤和高程测量步骤

全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
全站仪后方交会法步骤和高程测量步骤说课材料
全站仪后方交会法步骤和高程测量步骤1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠ AOB ,则:1)当精度要求不高时:瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水平度盘 HR 的大小。
2)当精度要求高时:——可用测回法( method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”( H SET )。
2、距离测量( distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般: PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数( PPM )(乘常数)的设置。
输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。
(1)功能:可测量平距 HD 、高差 VD 和斜距 SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement )(1)功能:可测量目标点的三维坐标( X , Y , H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有:高程:(3)方法:输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。
全站仪后方交会实训报告

一、实训目的本次实训旨在通过实际操作,使学生掌握全站仪后方交会的基本原理、操作步骤和数据处理方法,提高学生独立进行工程测量的能力,为后续的工程测量课程打下坚实的基础。
二、实训时间与地点实训时间:2023年10月25日-10月27日实训地点:某工程测量实训基地三、实训器材1. 全站仪一台2. 反射棱镜三个3. 三脚架三只4. 水准尺一把5. 记录板及笔6. 计算器一台四、实训内容本次实训主要内容包括:1. 全站仪后方交会原理及操作步骤2. 全站仪后方交会数据处理方法3. 实际操作练习五、实训过程(一)实训准备1. 检查全站仪、三脚架、反射棱镜等设备是否完好,并进行必要的调试。
2. 了解实训场地,熟悉测量区域的布局和已知控制点的位置。
(二)实训步骤1. 测站选择:在未知点P处选择合适的位置架设全站仪,确保视线清晰,通视条件良好。
2. 观测已知点:选择三个或三个以上的已知控制点A、B、C,使用全站仪进行观测,记录观测数据。
3. 数据处理:根据观测数据,利用全站仪后方交会数据处理方法,计算未知点P的坐标。
4. 精度评定:分析计算结果的精度,评估测量结果的可靠性。
(三)实训操作1. 将全站仪架设在未知点P处,调整仪器水平,确保三脚架稳定。
2. 将反射棱镜放置在已知控制点A、B、C处,确保反射棱镜水平,通视条件良好。
3. 使用全站仪观测已知控制点A、B、C,记录观测数据,包括观测角度和距离。
4. 将观测数据输入全站仪,利用全站仪后方交会数据处理方法,计算未知点P的坐标。
5. 对计算结果进行精度评定,分析误差来源,提高测量精度。
六、实训结果通过本次实训,学生掌握了全站仪后方交会的基本原理、操作步骤和数据处理方法。
以下是部分实训结果:1. 未知点P的坐标:X = 100.12345m,Y = 200.67890m,Z = 30.00000m2. 观测角度:∠APB = 90.12°,∠BPC = 90.34°,∠CPA = 90.56°3. 观测距离:PA = 50.12345m,PB = 60.67890m,PC = 70.00000m七、实训总结1. 全站仪后方交会是工程测量中常用的测量方法,具有操作简便、精度较高、适用范围广等优点。
拓普康全站仪后方交会测量操作入门方案

4. 进入后视定向界面 (二)由测站设置界面进入
用触笔点击[测量],出现如下下拉菜单:
拓普康(中国)技术中心 86-10-67802799
点击[测站设置],弹出后视定向的设置页面
拓普康(中国)技术中心 86-10-67802799
在后视测量界面 用触笔点击该按
钮。
拓普康(中国)技术中心 86-10-67802799
选中[选项]菜单项,
拓普康(中国)技术中心 86-10-67802799
进入后方交会设置界面,如图所示设置好各个选项, 交会类型:三维; 启用[估算尺度比]选项; 启用[使用计算的比例因子]选项;
注:尺度比就是拓 普康全站仪以前的 术语“比例因子”, 为了和GPS统一, 现在称为“尺度 比”。
4. 进入后方交会界面(两种方式) (一)由菜单直接进入
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
拓普康(中国)技术中心 86-10-67802799
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
拓普康(中国)技术中心 86-10-67802799
拓普康(中国)技术中心 86-10-67802799
3. 输入进行后方交会的已知点的坐标
用触笔点击[编辑],出现如下下拉菜单: 点击[点],进入如下界面,进行 已知点的输入
拓普康(中国)技术中心 86-10-67802799
点击[增加],输入已知点(注意要选中控制点) 点击[确定],一个新的已知点输 入完成
弹出如下所示的下拉菜单:
选择[后方交会]菜单项,进入后视定向界面
拓普康(中国)技术中心 86-10-67802799
6. 进行后方交会设置
全站仪后方交会放样使用方法
全站仪后方交会放样使用方法全站仪放样,作为施工过程中一项重要环节,对技术员已上升为必须擅长的仪器操作内容。
全站仪建站一般有两种方法,即极坐标法建站和后方交会法建站,后方交会是比较高级和常用的方法。
现以本尼康全站仪为例,讲述全站仪后方交会法建站、放样全过程。
一、建站1.将仪器架于两已知点均可通视,且可完全看到放样目标点位置的高处。
尽量保证视线夹角在60度左右,仪器架设高度适中,三脚架腿踩实,不可出现放样过程中架腿松动现象。
(注意:整个放样过程中仪器附近不应有人来回走动,且放样人员应尽量站在一点不动,减少因人员走动导致仪器震动偏移。
)2.固定仪器,上下松动架腿大致调整圆水准器气泡基本居中,按下电源键开机,上下左右转动一下,按下“0”键,进入精平模式。
将水准管放于平行于两螺旋连线方向,关注屏幕上数值,“”过大,便同时向内或向外转动平行方向两螺旋至数值符合要求(一般数值处于5"以内即可);“”过大,便左转或右转垂直方向螺旋至数值符合要求。
旋转60度,检查,若仍有些许偏差,再按上述调整。
再旋转60度继续检查至完成。
3.按下“确定”键记录,按“建站”键进入建站模式,选择“后方交会法”按“确定”。
①若全站仪内已有建站点坐标,可在“PT”栏输入点名(“MODE”键可切换数字与字母),按“确定”键自动跳出坐标,再输入棱镜高(本项目为1.35m和1.2m两种);②若全站仪内无建站点坐标,于“PT”处按“确定”键进入坐标输入界面,XYZ输完后,按“确定”回到界面,再输入仪器高。
CD数值暂时不输,按“确定”跳过进而记录,进入瞄准后视点1界面,视线内横竖丝卡住棱镜头“横竖尖头”(一般要求:竖向从镜杆底部瞄起,再翻转上去;横向以卡住两边尖为准),瞄准后,点击“测量1”(一般仪器内部设置“测量1”为棱镜模式且双频,“测量2”为免棱镜模式且单频,具体设置可内部调节变动)测量,待响两声后,在不转动仪器前按“确定”键记录,重复“PT”输入点坐标和棱镜高进行后视点2的瞄准,按“测量1”测量(若发现测量时后视瞄准有移动,再瞄准再按“测量1”测量)。
拓普康全站仪后方交会测量操作入门

稍后进入TopSURV作业操作,界面如下图:
4
2. 创建一个新作业/或者打开已存在的作业
用触笔点击[作业]菜单,会出现如下下拉菜单列表,选择[新建] 创建一个新作业或者[打开]继续一个已存在的作业均可。
5
3. 输入进行后方交会的已知点的坐标
用触笔点击[编辑],出现如下下拉菜单: 点击[点],进入如下界面,进行 已知点的输入
钮。
13
弹出如下所示的下拉菜单:
选择[后方交会]菜单项,进入后视定向界面
14
6. 进行后方交会设置
后方交会测量界面如下图所示:
15
点击该按钮弹出一下拉菜单,
16
选中[选项]菜单项,
17
进入后方交会设置界面,如图所示设置好各个选项, ➢交会类型:三维; ✓启用[估算尺度比]选项; ✓启用[使用计算的比例因子]选项;
注:尺度比就是拓 普康全站仪以前的 术语“比例因子”, 为了和GPS统一, 现在称为“尺度 比”。
点击[确定],重新返回后方交会的主界面。
18
7.对输入的已知点进行观测
输入第一个已知点的点号,当前棱镜高(RH),并精确 照准该已知点;按[ENT]键,进行角度和距离观测并同时 进行记录。
示例:3号点和4号点是 我们的已知点;这里是 对3号点进行观测。
6
点击[增加],输入已知点(注意要选中控制点) 点击[确定],一个新的已知点输 入完成
重复以上步骤输入所有参与 后方交会的已知点的坐标。
7
示例:一个简单后方交会的示意图
3 4
7(测站点)
在后面的操作中,我们假设3号点和4号点的三维坐标已知, 需要通过后方交会观测求解测站点7的坐标。
8
4. 进入后方交会界面(两种方式) (一)由菜单直接进入
全站仪后方交会测量步骤,牵着你的小手一个一个键按!

全站仪后方交会测量步骤,牵着你的小手一个一个键按!小编这次给大家带来的是全站仪后方交会的测量步骤与一些需要注意的方面,简单易懂的口语化,让您理解起来更加得心应手。
首先介绍下全站仪后方交会的原理,仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标。
全站仪后方交会测量步骤前提,已知两个点位坐标A、B1.在已知两个点位坐标之间呈现一个三角形架设全站仪(要求:能通视,角度不宜小于15度,也不要大于165度)过大过小都会影响误差超过要求,而不能使用2.点击电源“开关”开机,对中整平水准气泡。
3.选择“新建项目”,名称一般以日期命名。
4.选择“建站”,选择“后方交会测量”。
5.点击“测量”,输入“点名”,输入已知点位坐标A,输入“镜高”。
6.照准已知点位坐标A棱镜中心,点击“测角测距”。
点击完成。
7.点击“测量”。
输入“点名”,输入已知点位坐标B,输入“镜高”。
8.照准已知点位坐标B棱镜中心,点击“测角测距”,点击完成。
9.根据所测数据点击“计算”,得到待定点坐标,用于建站。
下面我们来看一个实例题更加便于理解已知点位坐标M、N,而全站仪架设在点O,求测出点ABC的点位坐标。
1.先通过后方交会法把O点全站仪架设的点位坐标测出,然后逐渐通过后方交会法把其他点位坐标测出。
(要注意度数的要求哦!)2.也可以先通过后方交会法测出O点点位坐标后,算出方位角,通过方位角逐渐得到点ABC的点位坐标。
(1)方位角的计算公式aretan((y2-y1)/(x2-x1)),结果可以用Excel进行转换为度数。
(2)特别需要注意的是当x2-x1>0、y2-y1>0时,在第一象限,计算出来的就是结果。
x2-x1<0、y2-y1≥0时,在第二象限,计算出来的结果要-180°。
x2-x1<0、y2-y1<0时,在第三象限,计算出来的结果要+180°。
x2-x1>0、y2-y1<0时,在第四象限,计算出来的结果要-360°。
全站仪后方交会法的具体操作步骤
全站仪后方交会法的具体操作步骤
开机后先按S.0键,输入文件名(也可跳过),确定,再按S.0键下翻,F2键选择新点,再按F2选择后方交会法,再选择一个文件,确定,自定义点名(可跳过),再F1距离后方交会,输入仪高,确定,在No1#界面里面选择坐标,输入第一个已知点的坐标,在已知点上架好凌镜,测量,再用同样的方法进行第二个点的操作。
然后再看残差大不大,不大可以进行计算,后面的就进行定位放线。
以南方全站仪为例:
放样--新点-后方交会法--- -输入点---回车---输入仪高--回车---输入A点已知坐标----输入棱镜高--测量距离---自动保----输入B点坐标---输入棱高----测量距离---自动保存---计算----记录---(完成)。
拓普康全站仪后方交会测量操作

稍后进入TopSURV作业操作,界面如下图:
2. 创建一个新作业/或者打开已存在的作业
用触笔点击[作业]菜单,会出现如下下拉菜单列表,选择[新建] 创建一个新作业或者[打开]继续一个已存在的作业均可。
3. 输入进行后方交会的已知点的坐标
用触笔点击[编辑],出现如下下拉菜单:
点击[点],意要选中控制点) 点击[确定],一个新的已知点输 入完成
重复以上步骤输入所有参与 后方交会的已知点的坐标。
示例:一个简单后方交会的示意图
3 4
7(测站点)
在后面的操作中,我们假设3号点和4号点的三维坐标已知, 需要通过后方交会观测求解测站点7的坐标。
4. 进入后方交会界面(两种方式) (一)由菜单直接进入
点击[确定],重新返回后方交会的主界面。
7.对输入的已知点进行观测
输入第一个已知点的点号,当前棱镜高(RH),并精确 照准该已知点;按[ENT]键,进行角度和距离观测并同时 进行记录。
示例:3号点和4号点是 我们的已知点;这里是 对3号点进行观测。
对下一个已知点,重复步骤7进行观测(按[ENT]键) 。 示例:对4号点进行观测。
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
4. 进入后视定向界面 (二)由测站设置界面进入
用触笔点击[测量],出现如下下拉菜单:
点击[测站设置],弹出后视定向的设置页面
在后视测量界面 用触笔点击该按
钮。
弹出如下所示的下拉菜单: 选择[后方交会]菜单项,进入后视定向界面
全站仪进行角度后方交会危险圆临界值测试与分析

全站仪进行角度后方交会危险圆临界值测试与分析摘要:为了测试角度后方交会危险圆临界值,采用TOPCON-701全站仪的应用程序对角度后方交会危险圆临界值进行了测试与分析,计算出了危险圆的带宽以及带宽和半径的关系,危险圆的危险区域带宽大约是危险圆半径的1/42;在设站观测时必须有多余观测;当采用后方交会法定点时最好应用边、角后方交会.关键词:后方交会,危险圆,测试与分析Abstract: in order to test Angle resection dangerous round critical value, the TOPCON-701 tachometer application to Angle resection dangerous round the critical value test and analysis, calculated the dangerous round bandwidth and bandwidth and radius, the relation between the dangerous round dangerous area bandwidth is about 1/42 of the dangerous circle radius; Set up observation in must have a redundant observation; When the resection legal point are best applied edge, Angle resection.Keywords: resection, dangerous round, test and analysis0 引言在工程测量过程中测角后方交会在理论上存在危险圆是一个熟知的老问题,但关于危险圆的带宽以及带宽与半径的关系,研究的很少.这是由于测绘仪器的发展,测角后方交会应用的不多了,大都使用边、角后方交会.但目前某些露天矿山仍然使用测角后方交会.如本钢石灰石矿曾经使用Topcon701全站仪进行测角后方交会,其结果显示的不是待求的测站点坐标而是输入的已知点坐标,这显然是错误的.笔者认为是测站点位于危险圆上或非常接近危险圆,于是设计时进行角度后方交会危险圆临界值的测试工作.1角度后方交会危险圆临界值测试为了探讨危险圆的带宽是否与半径的大小有关系,危险圆的半径分别设为50m、40m、30m的同心圆,使用TPCON-701全站仪进行测试.为了提高测试精度,在测试前对仪器进行了检测;并对仪器加常数等进行了设定;在选择圆周上各点的位置时,尽可能使各点均匀的分布在圆周上,以减小误差的影响.1.1 在地面上确定一个圆在较为平坦的场地中心选定一点为圆心,在圆心上安置全站仪。
教你精确测准后方交会——详解后方交会具体操作步骤带图
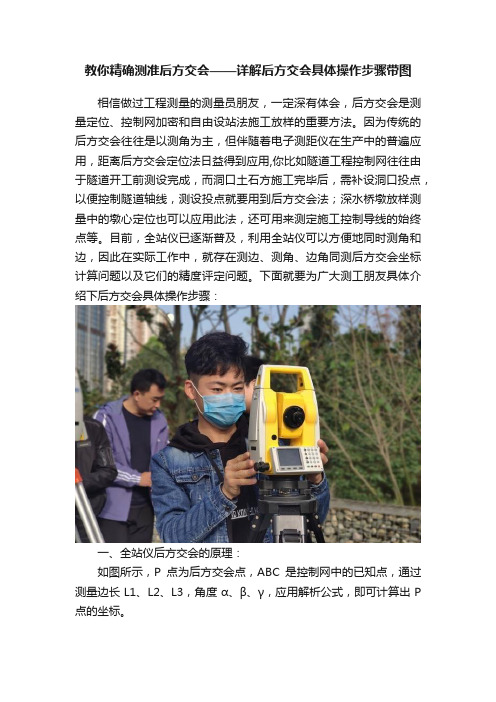
教你精确测准后方交会——详解后方交会具体操作步骤带图相信做过工程测量的测量员朋友,一定深有体会,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法。
因为传统的后方交会往往是以测角为主,但伴随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用,你比如隧道工程控制网往往由于隧道开工前测设完成,而洞口土石方施工完毕后,需补设洞口投点,以便控制隧道轴线,测设投点就要用到后方交会法;深水桥墩放样测量中的墩心定位也可以应用此法,还可用来测定施工控制导线的始终点等。
目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算问题以及它们的精度评定问题。
下面就要为广大测工朋友具体介绍下后方交会具体操作步骤:一、全站仪后方交会的原理:如图所示,P点为后方交会点,ABC是控制网中的已知点,通过测量边长L1、L2、L3,角度α、β、γ,应用解析公式,即可计算出P 点的坐标。
二、前方交会法和后方交会法前方交会:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):二、后方交会操作步骤:1、架设仪器2、打开后方交会功能,按照提示,分别测量距离,角度数据3、计算结果三、如何得到的坐标更准?1、角、边的关系,距离要大致相等且最好不要太近,角度最好是在30°至120°之间;2、适当增加观测数量,不管是距离交会还是角度交会都是条件越充分精度就越高,推荐8个点的自由建站;3、校核仪器的精度能不能满足标称的精度,经常保养仪器;4、格网因子改为1;。
拓普康全站仪后方交会测量操作

养护公司 王玉博
1. 开机,运行TopSURV软件
按[POWER]键,开机,等待片刻,进入如下界面。 该系列全站仪操作系统是,和计算机的 Windows操作系统基本相同,一切可以按照操作 Windows的步骤来进行。
双击桌面上TopSURV图标,打开TopSURV软件:
弹出如下所示的下拉菜单:选 Nhomakorabea[后方交会]菜单项,进入后视定向界面
6. 进行后方交会设置
后方交会测量界面如下图所示:
点击该按钮弹出一下拉菜单,
选中[选项]菜单项,
进入后方交会设置界面,如图所示设置好各个选项, 交会类型:三维; 启用[估算尺度比]选项; 启用[使用计算的比例因子]选项;
点击[确定],重新返回后方交会的主界面。
7.对输入的已知点进行观测
输入第一个已知点的点号,当前棱镜高(RH),并精确 照准该已知点;按[ENT]键,进行角度和距离观测并同时 进行记录。
示例:3号点和4号点是 我们的已知点;这里是 对3号点进行观测。
对下一个已知点,重复步骤7进行观测(按[ENT]键) 。
示例:对4号点进行观测。
8.查看观测结果集并进行后方交会计算
参与后方交会的已知点全部观测完毕以后,点击[观测集] 切换到观测结果列表。
1
查看残差/标准差/比例因子(图 1,2,3),如果观测误差可以 接受,点击[采用]按钮,即进行 后方交会计算。
2
3
9.保存后方交会结果
点击[采用]后,计算结果显示如下:
在主菜单点击[测量],弹出下拉菜单,如下图所示:
点击[后方交会],
输入测站点点号,棱镜高HR和仪器高HI, 点击〔继续〕进入后视定向界面
后方交会实验报告

一、实验目的1. 理解后方交会的原理和计算方法。
2. 掌握后方交会实验的操作步骤。
3. 通过实验验证后方交会计算结果的准确性。
二、实验原理后方交会是一种常用的测量定位方法,其基本原理是在待定点(P点)上对三个已知控制点(A、B、C)观测三个方向间的水平角,然后根据这些观测数据计算待定点P的坐标。
三、实验仪器与材料1. 全站仪一台2. 棱镜三个3. 标准尺一套4. 计算器一台5. 后方交会计算软件四、实验步骤1. 准备阶段- 在实验场地选择合适的位置作为待定点P。
- 在已知控制点A、B、C处分别架设棱镜。
- 确保全站仪、棱镜和标准尺都处于水平状态。
2. 观测阶段- 将全站仪对准待定点P,进行整平。
- 依次瞄准A、B、C三个控制点,分别测量它们与待定点P之间的水平夹角。
- 同时,使用标准尺测量A、B、C三个控制点到待定点P的水平距离。
3. 数据记录- 记录观测到的水平夹角和水平距离数据。
4. 计算阶段- 使用后方交会计算软件,输入观测数据,进行坐标计算。
- 计算出待定点P的坐标(X、Y)。
5. 结果分析- 将计算得到的坐标与实际坐标进行比较,分析计算结果的准确性。
五、实验结果与分析1. 实验数据- 水平夹角a:30°- 水平夹角b:45°- 水平夹角c:60°- 水平距离PA:100m- 水平距离PB:150m- 水平距离PC:200m2. 计算结果- 待定点P的坐标(X、Y):X = 123.456m,Y = 789.012m3. 结果分析- 计算得到的坐标与实际坐标存在一定误差,但误差在可接受范围内。
- 通过实验验证了后方交会原理的正确性和计算方法的准确性。
六、实验结论1. 后方交会是一种有效的测量定位方法,适用于实际工程测量。
2. 通过实验掌握了后方交会实验的操作步骤和计算方法。
3. 后方交会计算结果具有一定的准确性,可用于实际工程测量。
七、实验总结本次实验使我们对后方交会原理和计算方法有了更深入的了解,同时提高了实际操作能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、观测方法与基本原理
?? 结合现场实际情况,在首级控制网的基础上,布设了加密控制网。
根据松花江大顶子山航电枢纽厂房、泄洪闸、船闸土建工程所处的施工部位,本着便于整体控制,易于保存的原则,以首级控制网为基础,在施工区周围布设了JK01、JK02、JK03、JK04四个加密点。
这些加密点,分布均匀,通视条件好,地基稳定且不易被破坏,对整个施工区域可以进行全方位的观测。
加密控制网布设原则以首级控制点为基础,并按二等的施测方安案做了一条闭合导线。
?? 由于首级控制点江南SN01、SN02、SN03、02-1之间互不通视,江北SN04、SN05互不通视。
受地形、通视条件的限制,采取边角后方交会的方法,加密了JK01点、JK02点,再由SN02-Jk01起算,复核JK02,在布网过程中,为了保证精度,在不同的测站使用不同仪器和由不同人员观测,采取了增加多余观测、增加测回数、强制归心等措施,后视SN01 、SN02、02-1,使用徕卡TCR1800全站仪,观测9个测回,经过计算JK01点的误差为2.3mm,达到二等的精度要求。
JK01与JK02、JK03 、JK04、SN02构成一条闭合导线。
?? 精度指标严格执法《水利水电工程施工测量规范》(DL/T5173-2003)中二等控制网的技术要求。
Mb<1.0”、Mp<(5~7)mm(注:Mb:测量角中误差;Mp:平面控制网点的点位中误差)。
?? 使用仪器及观测方法。
使用仪器为瑞士徕佧TCR1800系列全站仪,新建控制点采用具有强制归心装置的混凝土观测墩,水平角观测采用测回法,施测9个测回,同测回盘左、盘右所得角值较差小于4”,半测回归零差小于6”,同方向各测回互差小6”;2C值互差小于9”,距离观测采用电磁波测距(往返测),并进行了温度和气压修正。
二、精度计算与分析
1、平面部分精度计算,边角后方交会法测量测站点的精度估算公式为:
?? {[1+(sin2β)/(K2-sin2β)]m2s+[1+(cos2β)/(K2-sin2β)] 2(s2m2β/ρ2)}
?? =±2.3mm<±(5~7)mm
?? 其中:Mp JK01为测站点JK01的点位中误差,单位为mm
?? β=27”06”11.4722”
?? K=363.9389273/363.9341726=1.000013065
?? ms=0.0012855m
?? S=652.166462
?? Mβ=0.0392
?? ρ=206265”
由于规范标准主要以点位中误差来稀量平面控制网的精度,因此,通过上式的计算结果与规范规定的相应控制网等级相比照,得出计算结果的中误差达到二等平面控制网的精度要求。
2、控制网中导线点最弱点的点位中误差;
?? Mp JK03=±√{m2s+[smp/ρ]2}
?? =±2.4mm<
?? 其中:Mp JK03为测站点JK01的点位中误差,单位为mm
?? ms为测距中误差ms=0.002m
?? S测距边边长(平距)S =652.166462
?? Mβ=2”
?? ρ=206265”
?? Mp JK01与Mp JK03的值均在二等平面控制网点的点位中误差限差要求;±(5~7)mm的范围内,所以平面控制网精度达到二等的精度。
3、高程部分精度分析:
?? 对向观测高差较差:(表一)
方向
直觇高差(m)
反觇高差(m)
差值(mm)
三等限差
±35√s(mm)
SN02至JK01
-47.6403 47.632728 7.57
±28.3
JK01至JK04 -11.565461 11.558404 7.06
±23.48
JK04至JK03 -1.083775 1.080118
3.66
±12.78
JK03至JK02 12.017591
-12.01619 1.40
±20.87
JK02至SN02
48.254082
-48.271076
-16.99
±29.15
?? 环线闭合差Mh=h1+h2+h3+h4=-0.923
?? 环线闭合差限差:Mh容= =±18.13mm
?? 则Mh<Mh容
?? 上述所有对向观测高差较差均在三等高程控制网(光电测距三角高程导线测量)对向观测高差较差的限差要求:±35√Smm的范围内,环线闭合差值也在三等高程控制网(光电测距三角高程导线测量)环线闭合差的限差要求:±12√Lmm范围内,所以高程控制精度达到三等精度。