卡尔曼滤波第四次作业
(完整word版)卡尔曼滤波实验报告
实验:卡尔曼滤波实现实验报告姓名:学号:日期:(以下内容用五号字书写,本页空白不够可续页)'1'1(1)(1/)(1)(1)(1)(1)(1/1)(1)(1)(2)K k P k k H k S k K k P k k H k R k --⎧+=+++⎪⎨+=++++⎪⎩(4) 则状态更新方程为:ˆˆ(1/1)(1/)(1)(1)Xk k X k k K k V k ++=++++ 协方差更新方程为:(1/1)(1/)(1)(1)(1/)P k k P k k K k H k P k k ++=+-+++ Matlab 程序如下:clear clc close all N=200; w=randn(2,N); x=zeros(2,N); x(:,1)=[1;1]; a=[1.1 0;0 1.02]; for k=2:N;x(:,k)=a*x(:,k-1)+w(k-1); endV=randn(2,N); Rvv=cov(V'); Rww=cov(w'); c=[1 0;0 0.9]; Y=c*x+V; p=zeros(2,2*N); s=zeros(2,N); b=zeros(2,2*N); x1=zeros(2,N); z1=x1; zp1=b;p(:,1:2)=[0 0;0 0]; s(:,1)=[4;8]; for t=2:N;x1(:,t-1)=a*s(:,t-1)+w(:,t-1);%X(k/k-1)p1(:,t*2-1:t*2)=a*p(:,t*2-3:t*2-2)*a'+Rww;%X(k|k-1)的协方差 z1(:,t-1)=c*x1(:,t-1);%测量估计zp1(:,t*2-1:t*2)=c*p1(:,t*2-1:t*2)*c'+Rvv;%测量估计协方差 b(:,t*2-1:t*2)=p1(:,t*2-1:t*2)*c'/zp1(:,t*2-1:t*2);%Kg 卡尔曼增益 s(:,t)=x1(:,t-1)+b(:,t*2-1:t*2)*(Y(:,t)-z1(:,t-1));%当前状态的最优结果p(:,t*2-1:t*2)=p1(:,t*2-1:t*2)-b(:,t*2-1:t*2)*c*p1(:,t*2-1:t*2);%更新当前状态估计值的协方差 end t=1:N;plot(s(1,:),s(2,:),'ro',Y(1,:),Y(2,:),'g.',x(1,:),x(2,:),'b*'); xlabel('time'); ylabel('Amplitude'); title('Kalman Filter')legend('kalman 滤波估计值','测量值','真实值',4) grid on二、实验过程(1) 分析卡尔曼滤波算法原理,总结卡尔曼滤波算法流程 (2) 在第一步的基础上编写matlab 程序(3) 设计状态方程及测量方程,确定初值进行滤波。
《2024年卡尔曼滤波的初值计算方法及其应用》范文

《卡尔曼滤波的初值计算方法及其应用》篇一一、引言卡尔曼滤波是一种高效的线性动态系统状态估计方法,广泛应用于各种领域,如导航、控制、信号处理等。
其核心思想是通过递归的方式,根据系统状态方程和观测数据,不断更新系统状态的最优估计值。
本文将详细介绍卡尔曼滤波的初值计算方法及其应用。
二、卡尔曼滤波的基本原理卡尔曼滤波基于贝叶斯估计理论,通过系统状态方程和观测数据,不断更新系统状态的最优估计值。
其基本原理包括预测和更新两个步骤。
预测步骤根据系统状态方程和上一时刻的最优估计值预测当前时刻的状态;更新步骤则根据当前时刻的观测数据和预测误差,对预测结果进行修正,得到当前时刻的最优估计值。
三、卡尔曼滤波的初值计算方法卡尔曼滤波的初值计算主要包括系统状态初值的设定和协方差矩阵的设定。
(一)系统状态初值的设定系统状态初值是指系统在初始时刻的状态估计值。
其设定应考虑系统的实际情况和初始条件。
一般而言,可以通过对系统进行静态测量或根据经验设定初值。
在设定初值时,应尽量使初值接近真实值,以减小滤波误差。
(二)协方差矩阵的设定协方差矩阵是描述系统状态估计误差的统计特性。
在卡尔曼滤波中,协方差矩阵的设定对滤波性能具有重要影响。
一般而言,协方差矩阵的设定应根据系统的实际情况和先验知识进行。
在初始时刻,可以根据经验或试验数据设定一个合理的协方差矩阵。
随着滤波的进行,协方差矩阵会逐渐收敛到真实值。
四、卡尔曼滤波的应用卡尔曼滤波在各种领域都有广泛的应用。
下面以导航系统和控制系统为例,介绍卡尔曼滤波的应用。
(一)导航系统中的应用在导航系统中,卡尔曼滤波被广泛应用于GPS定位、惯性导航等。
通过卡尔曼滤波,可以有效地抑制噪声干扰,提高定位精度和稳定性。
在GPS定位中,卡尔曼滤波可以融合多个卫星信号,提高定位速度和精度;在惯性导航中,卡尔曼滤波可以抑制加速度计和陀螺仪等传感器噪声,提高导航精度和稳定性。
(二)控制系统中的应用在控制系统中,卡尔曼滤波被广泛应用于估计和控制系统的状态。
北航卡尔曼滤波实验报告-GPS静动态滤波实验

卡尔曼滤波实验报告2014 年 4 月GPS 静/动态滤波实验一、实验要求1、分别建立GPS 静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS 数据进行Kalman 滤波。
2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。
4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。
二、实验原理2.1 GPS 静态滤波选取系统的状态变量为[ ]TL h λ=X ,其中L 为纬度(deg),λ为经度(deg),h 为高度(m)。
设()w t 为零均值高斯白噪声,则系统的状态方程为:310()w t ⨯=+X(1)所以离散化的状态模型为:,111k k k k k W ---=+X X Φ(2)式中,,1k k -Φ为33⨯单位阵,k W 为系统噪声序列。
测量数据包括:纬度静态量测值、经度静态量测值和高度构成31⨯矩阵Z ,量测方程可以表示为:k k k Z HX V =+(3)式中,H 为33⨯单位阵,k V 为量测噪声序列。
系统的状态模型是十分准确的,所以系统模型噪声方差阵可以取得十分小,取Q 阵零矩阵。
系统测量噪声方差阵R 由测量确定,由于位置量测精度为5m ,采用克拉索夫斯基地球椭球模型,长半径e R 为6378245m ,短半径p R 为6356863m 。
所以R 阵为:2225180()005180()0cos()005p e R R L ππ⨯⎛⎫ ⎪⨯ ⎪ ⎪⨯= ⎪⨯⨯ ⎪ ⎪ ⎪⎝⎭R (4)2.2 GPS 动态滤波动态滤波基于当前统计模型,在地球坐标系下解算。
选取系统的状态变量为Tx x x y y y z z z X x v a y v a z v a εεε⎡⎤=⎣⎦,其中,,,x x x x v a ε依次为地球坐标系下x轴上的位置、速度、加速度和位置误差分量,,y z 轴同理。
kalman 滤波器大作业

(16)
其中Zk 为归一化参数,式(15)和式(16)描述了k − 1时刻后验概率密度函数p (xk−1 |zk−1 )向k 时
4.2
Kalman滤波的M AP 准则推导
根据贝叶斯估计最优解的通式,在极大后验估计(M AP )准则下,有:
AP = arg max p (xk |z1:k ) x ˆM k xk ∆
(17)
在式(15)中,若p (xk−1 |z1:k−1 )满足高斯分布,同时做出如下假设: 1. wk 和vk 是彼此不相关的零均值条件下的高斯噪声,协方差可以分别表示为Qk 和Rk ; 2. f (xk−1 )是xk−1 的线性函数,h (xk )为xk 的线性函数。 此时的状态空间方程为: xk = Fxk + wk zk = Hxk + vk 由式(16)可知: p (xk |z1:k ) = p (xk |zk ) p (xk |z1:k−1 ) ∝ p (xk |zk ) p (xk |z1:k−1 ) p (zk |z1:k−1 ) (20) (18) (19)
式(3)中,过程噪声wk 设为零均值条件下的高斯白噪声,噪声的协方差矩阵表示为Q。 [ ] [ ] Θ 0 T 3 /3 T 2 /2 Q=q Θ= (8) 0 Θ T 2 /2 T q 是过程噪声强度参数,过程噪声的作用一是体现了建立动力学模型过程中未考虑到其他力 的影响作用,二是体现模型与实际的匹配程度。 因此仿真中可通过调整协方差矩阵Q来使 得滤波器的初始噪声达到最优,确保滤波器尽快收敛。 在图1的坐标系中,雷达观测坐标系化为极坐标系,观测量包括目标距坐标原点的距 离r和目标运动速度方向和X 正方向的夹角ε。 高斯噪声环境下观测噪声的标准差粉标表示 为σr 和σε。 极坐标下观测变量r和ε转换为直角坐标系下的d和h存在以下关系: d = r cos ε h = r sin ε 因此,观测方程可以用如下的线性模式表示为: zk = HXk + vk (10) (9)
数字图像处理第四次作业

(3)结果分析 从处理结果看,两种滤波方法得到图像的平滑效果较为明显,且窗口越大,滤波器模板的越 大, 平滑效果越明显, 图像细节越模糊。 如 test2 中人脸图像的眼睛、 鼻子及手掌外侧部分,
随着滤波器模板的增大, 可以明显的感受到图像模糊的效果。 将两种滤波方法的处理结果进 行对比, 可以发现高斯滤波虽然也是在很大程度上对图像进行了平滑处理, 但更好的保留了 图像的细节, 图像的模糊程度低于中值滤波。 如从 test1 可以明显的看出, 左上角的小白条, 在中值滤波中消除掉了,而在高斯滤波中仍然存在,只是看起来更加模糊了而已。 2.利用高通滤波器滤波测试图像 test3,4:包括 unsharp masking, Sobel edge detector, and Laplace edge detection. (1)实验原理及方法 锐化滤波能减弱或消除图像中的低频率分量, 但不影响高频率分量。 因为低频分量对应 图像中灰度值缓慢变化的区域,与图像的整体特性,如整体对比度和平均灰度值等有关。锐 化滤波将这些分量滤去可使图像反差增加,边缘明显。在实际应用中,锐化滤波可用于增强 被模糊的细节或者低对比度图像的目标边缘。 图像锐化的主要目的有两个: 一是增强图像边 缘,使模糊的图像变得更加清晰,颜色变得鲜明突出,图像的质量有所改善,产生更适合人 眼观察和识别的图像;二是希望经过锐化处理后,目标物体的边缘鲜明,以便于提取目标的 边缘、对图像进行分割、目标区域识别、区域形状提取等,为进一步的图像理解与分析奠定 基础。 由于锐化使噪声受到比信号还要强的增强, 所以要求锐化处理的图像有较高的信噪比; 否则,锐化后图像的信噪比更低。 1) unsharp masking 首先将原图像低通滤波后产生一个钝化模糊图像, 将原图像与这模糊图像相减得到保留 高频成份的图像, 再将高频图像用参数放大后与原图像叠加, 这就产生一个增强了边缘的图 像。最初将原图像通过低通滤波器后,因为高频成份受到抑制,从而使图像模糊,所以模糊 图像中高频成份有很大削弱。 将原图像与模糊图像相减的结果就会使 f(x、 y)的低频成份损失 很多,而高频成份较完整地被保留下来。因此,再将高频成份的图像用一个参数放大后与原 图像 f(x、y)叠加后,就提升了高频成份,而低频成份几乎不受影响。 2) Sobel edge detector 索贝尔算子(Sobeloperater)主要用作边缘检测,在技术上,它是一离散性差分算子, 用来运算图像亮度函数的灰度近似值。 在图像的任何一点使用此算子, 将会产生对应的灰度 矢量或其法矢量。 它主要关注二维图像上的变化程度测量, 特别强调变化频率高的区域以确 定边界。该算子包含两组 3x3 的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分 别得出横向及纵向的亮度差分近似值。 如果以 A 代表原始图像, Gx 及 Gy 分别代表经横向及 纵向边缘检测的图像灰度值,其公式如下: −1 0 1 1 2 1 ������������ = −2 0 2 ∗ ������������������ = 0 0 0 ∗ ������ −1 0 1 −1 −2 −1 图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。 G= 然后可用以下公式计算梯度方向。 θ = tan−1 ( ������������ ) ������������
卡尔曼滤波PPT课件

• k=1, (2) 0.5000H,(2) 0.500Sˆ(02), 0.4762 Sˆ(1) 0.4048 X (2)
• k=2, (3) 0.4048H,(3)
(4)
H (4)
• k=3, (5) 0.3824H,(5)
• k=4, (6) 0.3768H,(6)
0.404Sˆ(83) , 0.4941Sˆ(2) 0.3824 X (3)
其中
,
尔曼滤波器的稳态
和
X(k) C(k)S(k) w(k)
S信(k号) 和A噪(k声)S统(k计独1立) 。w求1卡(k 1)
。
A 0.8 C 1
Q(k
)
2 w1
0.36
R(k) var(w(k)) 1
H(k) ε(k )
第22页/共32页
(5)
ε(k )
ε(k) 0.64ε(k 1) 0.36 H(k) 0.64ε(k 1) 1.36
第19页/共32页
初始条件为Sˆ(1) 0, (0) 1 ,k=0开始
观测,利用等式(4),(5)进行递推得:
(0)
H (0)
Sˆ (0) X (0)
• k=0, (1) 1.0000H,(1) 1.000Sˆ(01), 0.4Sˆ(0) 0.5X (1)
ε(k令) H(K)C(k) ε(k) ε(k,)C(k) τ H(k) τ H(k)[C(k) ε(k)C(k) τ R(k)]H(k) τ
代入上C式(化k简)ε:(k)C(k) τ R(k) SSτ U ε(k)C(k) τ
ε(k ) ε(k) H(K)U τ (6-U68H) (k) τ H(k)SS τ H(k) τ
卡尔曼滤波方法资料课件

线性最小方差估计方法的优 点
适用于线性系统状态估计,计算量较小,易于实现。
线性最小方差估计方法的 缺点
对非线性系统效果不佳,需要先验知识或模 型参数。
04
卡尔曼滤波方法的实现 和应用案例
卡尔曼滤波方法的软件实现
软件平台
可以使用Python、C、Matlab等编程语言实现卡尔曼滤波算法。
卡尔曼滤波方法在控制系统中的应用案例
应用场景
卡尔曼滤波方法在控制系统中主要用于估计系统的状态变量。
案例分析
通过实际控制系统的数据和实验,验证卡尔曼滤波方法在控制系统中的可行性和稳定性。
卡尔曼滤波方法在雷达系统中的应用案例
应用场景
卡尔曼滤波方法在雷达系统中主要用于 目标跟踪和运动参数估计。
VS
案例分析
卡尔曼滤波方法的基本概念和原理
基本概念
卡尔曼滤波方法是一种递归估计方法,通过建立状态方程和观测方程,对系统状态进行最优估计。
原理
卡尔曼滤波方法基于最小均方误差准则,通过不断更新估计值来逼近真实值,具有计算量小、实时性 强的优点。
卡尔曼滤波方法的应用领域
机器人
用于机器人的定位、路径规划、 避障等。
描述系统状态和观测之间的关系。
定义初始状态和误差协方差
02
确定系统初始状态和误差协方差的估计值,为后续的滤波过程
提供初始条件。
选择合适的模型参数
03
根据实际情况选择合适的模型参数,如系统动态参数、观测参
数等,以更好地描述系统特性。
预测步骤
01
根据上一时刻的状态和误差协方 差,预测当前时刻的系统状态和 误差协方差。
卡尔曼滤波第四次作业
卡尔曼滤波与组合导航作业四一、作业内容本实验的主要内容是完成基于卡尔曼滤波的INS/GPS 组合导航实验。
INS 的输出频率为100Hz ,GPS 的输出频率为20Hz ,通过GPS 给出的3个方向的位置和速度作为量测信息与惯导解算结果进行组合,完成组合导航,比较分析组合导航的结果。
二、系统分析与系统建模捷联惯导的解算过程这里不再赘述,直接从组合导航所需的模型开始建模。
1. 状态方程系统的状态方程由捷联惯导的误差方程和惯性器件的误差方程组成:X FX GW =+式中,状态变量E N U E N U x y z xX V V V L H φφφδδδδδλδεεε=∇⎡⎣y ∇Tz ∇⎤⎦,其中E φ、N φ和U φ为数学平台失准角,E V δ、N V δ和U V δ分别为东向、北向和天向速度误差,L δ、δλ和H δ分别为纬度误差、经度误差和高度误差;系统噪声过程噪声[]x y z x y z Tw w w w w w w εεε∇∇∇=,包括陀螺和加速度计的随机误差(不包括随机常值误差);系统噪声方差阵Q 根据SINS/GPS 组合导航系统的惯性器件噪声水平选取。
状态转移矩阵F 和系统噪声矩阵G 的具体形式为:NS99966966151500F F F ⨯⨯⨯⨯⨯⎡⎤=⎢⎥⎣⎦,n b 33n 33b 93931560000C G C ⨯⨯⨯⨯⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦F 矩阵中,nb 33S n 33b 3333960000C F C ⨯⨯⨯⨯⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,NF 为对应惯导9个误差参数(3个姿态误差,3个速度误差,3个位置误差)的系统动态矩阵,它是(9*9)阶方阵。
其中非零元素可由惯导误差模型推导,具体为:3ie 5,1ie 2,32,4N ,7ie 3,1ie N 3,23,4M N 23,7ie 4243sin L L(cos L )(sin L tan L)1sin L cos L 1tan Lcos L sec LE E1,2ie 1,N N E1,2M N N M E 2N E,u,nN V tg R +hV f f R hV 1f f R +h R hV f f R +hR +hV f f R hV f f R hR hV f f f f f R hf ωωωωωω+==-++=-=-++=-==-=++==++=+=-+=N U4,44,5ie M M 2N 4,6ie 4,7ie N ie 5,1U5,3E54ie UN5,55,6M M 25,7ie sin L L)tan L 2sin L L(2cos L )2cos L sec L 2sin L ((2cos L sec L)EN E EUN N EN EN V tg R +hV V V f tg R h R hR +hV V V f f V V R h R hf f f f f 2V V f f R hR hV f R hωωωωωω+=-=+++=-+=++++==-=-=-=-++=-++,E6,1N6,2E6,4ie N 6,56,7E ie M 7,58,4M N 8,79,6N 2(cos L )22cos L 1sec L sec L tan L1EN EV f f f f V f R hV f f V R h f f R hR +hV f f R +hωω=-==++==-+==+==2. 量测方程SINS/GPS 组合导航采用松组合的方式,GPS 提供位置和速度信息,采用SINS 与GPS 的位置和速度之差作为卡尔曼滤波的量测信息。
北航卡尔曼滤波实验报告_GPS静动态滤波实验

卡尔曼滤波实验报告2014 年 4 月GPS静/动态滤波实验一、实验要求1、分别建立GPS静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS数据进行Kalman滤波。
2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。
4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。
二、实验原理2.1 GPS 静态滤波(deg)度(m)(1)所以离散化的状态模型为:(2)可以表示为:(3)矩阵。
5m ,采用克拉索夫斯基地球6378245m6356863m(4)2.2 GPS 动态滤波动态滤波基于当前统计模型,在地球坐标系下解算。
选取系统的状态变量为(5)式中,位置误差视为有色噪声,为一阶马尔科夫过程,可表示为:ετεετεετ-=-=-11(6)白噪声。
(7)(8)系统噪声为:(9)量测量为纬度动态量测值、经度动态量测值、高度和三向速度量测值。
由于滤波在地球坐标系下进行,为了简便首先将纬度、经度和高度转化为三轴位置坐标值,转化方式如下:(10)量测方程为:(11)综上,离散化的Kalman滤波方程为:(12)离散化的系统噪声协方差阵为:2[πˆ] ?kx=+<0“当前”加速度(13)离散化量测噪声协方差阵为:diag=R三、实验结果3.1 GPS静态滤波图1 GPS静态滤波前后导航轨迹图和估计误差3.2 GPS动态滤波图2 GPS动态滤波前后导航轨迹图和估计误差四、实验讨论1.简述动态模型与静态模型的区别与联系。
静态模型的速度和加速度均为0,系统静止,状态模型比较准确,模型误差较小,量测信息只有位置信息。
动态模型系统的速度和加速度均发生变化,采用当前统计模型建模,相比之下,系统模型的误差较大,量测信息由位置和速度信息。
卡尔曼滤波实验报告

一、实验目的1. 理解卡尔曼滤波的基本原理和算法流程;2. 掌握卡尔曼滤波在实际应用中的数据预处理、模型建立和参数调整;3. 分析卡尔曼滤波在不同场景下的性能表现。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3. 库:NumPy、SciPy、Matplotlib三、实验内容1. 卡尔曼滤波基本原理及算法流程卡尔曼滤波是一种递归的线性最小方差估计方法,用于处理线性动态系统和线性观测系统。
其基本原理如下:(1)状态方程:描述系统状态随时间的变化规律,即 \(x_{k+1} = A \cdot x_k + B \cdot u_k\),其中 \(x_k\) 表示状态向量,\(A\) 为状态转移矩阵,\(u_k\) 为控制输入。
(2)观测方程:描述观测值与系统状态之间的关系,即 \(z_k = H \cdot x_k + v_k\),其中 \(z_k\) 表示观测向量,\(H\) 为观测矩阵,\(v_k\) 为观测噪声。
(3)卡尔曼滤波算法:a. 初始化:设定初始状态 \(x_0\) 和初始协方差 \(P_0\);b. 预测:根据状态方程和初始状态,计算预测状态 \(x_k^{\hat{}}\) 和预测协方差 \(P_k^{\hat{}}\);c. 更新:根据观测方程和实际观测值,计算观测残差 \(y_k = z_k - H\cdot x_k^{\hat{}}\) 和观测残差协方差 \(S_k\);d. 估计:根据卡尔曼增益 \(K_k = P_k^{\hat{}} \cdot H^T \cdot (H\cdot P_k^{\hat{}} \cdot H^T + R)^{-1}\),更新状态 \(x_k = x_k^{\hat{}}+ K_k \cdot y_k\) 和协方差 \(P_k = (I - K_k \cdot H) \cdotP_k^{\hat{}}\)。
2. 卡尔曼滤波实验步骤(1)数据预处理:收集实验数据,包括系统状态、观测值和控制输入等,对数据进行清洗和标准化处理。
卡尔曼滤波简介和实例讲解
卡尔曼,美国数学家和电气工程师。
1930年5月19日生于匈牙利首都布达佩斯。
1953年在美国麻省理工学院毕业获理学士学位,1954年获理学硕士学位,1957年在哥伦比亚大学获科学博士学位。
1957~1958年在国际商业机器公司(IBM)研究大系统计算机控制的数学问题。
1958~1964年在巴尔的摩高级研究院研究控制和数学问题。
1964~1971年到斯坦福大学任教授。
1971年任佛罗里达大学数学系统理论研究中心主任,并兼任苏黎世的瑞士联邦高等工业学校教授。
1960年卡尔曼因提出著名的卡尔曼滤波器而闻名于世。
卡尔曼滤波器在随机序列估计、空间技术、工程系统辨识和经济系统建模等方面有许多重要应用。
1960年卡尔曼还提出能控性的概念。
能控性是控制系统的研究和实现的基本概念,在最优控制理论、稳定性理论和网络理论中起着重要作用。
卡尔曼还利用对偶原理导出能观测性概念,并在数学上证明了卡尔曼滤波理论与最优控制理论对偶。
为此获电气与电子工程师学会(IEEE)的最高奖──荣誉奖章。
卡尔曼著有《数学系统概论》(1968)等书。
什么是卡尔曼滤波最佳线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论。
从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理。
为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼滤波精彩文档理论。
卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
它适合于实时处理和计算机运算。
卡尔曼滤波的实质是由量测值重构系统的状态向量。
它以“预测—实测—修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被污染的系统中恢复系统的本来面目。
卡尔曼滤波详解

卡尔曼滤波详解卡尔曼滤波是一种常用的状态估计方法,它可以根据系统的动态模型和观测数据,对系统的状态进行估计。
卡尔曼滤波广泛应用于机器人导航、飞行控制、信号处理等领域。
本文将详细介绍卡尔曼滤波的原理、算法及应用。
一、卡尔曼滤波原理卡尔曼滤波的基本思想是利用系统的动态模型和观测数据,对系统的状态进行估计。
在卡尔曼滤波中,系统的状态被表示为一个向量,每个元素表示系统的某个特定状态量。
例如,一个机器人的状态向量可能包括机器人的位置、速度、方向等信息。
卡尔曼滤波的基本假设是系统的动态模型和观测数据都是线性的,而且存在噪声。
系统的动态模型可以表示为:x(t+1) = Ax(t) + Bu(t) + w(t)其中,x(t)表示系统在时刻t的状态向量,A是状态转移矩阵,B是控制矩阵,u(t)表示外部控制输入,w(t)表示系统的过程噪声。
观测数据可以表示为:z(t) = Hx(t) + v(t)其中,z(t)表示系统在时刻t的观测向量,H是观测矩阵,v(t)表示观测噪声。
卡尔曼滤波的目标是根据系统的动态模型和观测数据,估计系统的状态向量x(t)。
为了达到这个目标,卡尔曼滤波将状态估计分为两个阶段:预测和更新。
预测阶段:根据系统的动态模型,预测系统在下一个时刻的状态向量x(t+1)。
预测的过程可以表示为:x^(t+1|t) = Ax^(t|t) + Bu(t)其中,x^(t|t)表示在时刻t的状态向量的估计值,x^(t+1|t)表示在时刻t+1的状态向量的预测值。
卡尔曼滤波还需要对状态的不确定性进行估计,这个不确定性通常用协方差矩阵P(t)表示。
协方差矩阵P(t)表示状态向量估计值和真实值之间的差异程度。
预测阶段中,协方差矩阵也需要进行更新,更新的过程可以表示为:P(t+1|t) = AP(t|t)A' + Q其中,Q表示过程噪声的协方差矩阵。
更新阶段:根据观测数据,更新状态向量的估计值和协方差矩阵。
更新的过程可以表示为:K(t+1) = P(t+1|t)H'(HP(t+1|t)H' + R)^-1x^(t+1|t+1) = x^(t+1|t) + K(t+1)[z(t+1) - Hx^(t+1|t)]P(t+1|t+1) = (I - K(t+1)H)P(t+1|t)其中,K(t+1)表示卡尔曼增益,R表示观测噪声的协方差矩阵,I是单位矩阵。
卡尔曼滤波

目录第1章绪论 (1)1.1课题研究的背景 (1)1.2雷达信号检测与目标跟踪 (2)1.3雷达目标跟踪的基本方法 (3)1.3.1雷达目标跟踪的基本信息 (4)1.3.2目标机动模型 (5)1.3.3雷达目标跟踪的滤波算法 (6)1.3.2.1加权最小二乘滤波 (6)1.3.2.2 滤波 (7)1.4目标跟踪技术有待进一步解决的问题 (8)1.4.1卡尔曼滤波的稳定性和准确性 (8)1.4.2收敛速度的问题 (9)1.4.3滤波过程中的系统偏差的问题 (9)1.5课题来源 (10)1.6本文的主要工作和结构 (11)第2章卡尔曼滤波理论 (12)2.1卡尔曼滤波的基本算法 (12)2.2卡尔曼滤波的性质 (13)2.3 Kalman滤波算法的发展 (14)2.3.1扩展卡尔曼滤波 (16)2.3.2二阶滤波 (17)2.3.3修正增益的扩展卡尔曼滤波 (17)2.3.4自适应扩展卡尔曼滤波 (18)2.3.5基于加权测量噪声协方差矩阵的发散抑制方法 (18)2.4卡尔曼滤波模型 (19)2.5船舶运动目标建模的主要方法 (20)2.6卡尔曼滤波算法中线性化的误差 (21)2.7卡尔曼滤波的应用意义 (22)第3章改进的卡尔曼滤波算法 (24)3.1野值识别与处理 (24)3.1.1野值的识别 (24)3.1.2野值的处理 (25)3.1.3野值处理的仿真分析 (26)3.2目标运动模型的建立 (27)3.2.1Singer模型中的匀速运动目标的运动模型 (27)3.2.2Singer模型中的匀加速运动目标的运动模型 (28)3.3坐标转换 (28)3.4通过自适应选择状态噪声协方差矩阵Q来提高滤波稳定性的方法 (29)3.4.1滤波仿真 (31)3.4.1.1状态协方差矩阵对滤波结果的影响 (31)3.4.1.2对状态噪声协方差矩阵自适应选择以后的滤波结果仿真 (33)3.5双模型并行滤波构造 (34)3.5.1滤波构造的设计 (35)3.5.2模拟仿真 (36)3.5.2.1基础卡尔曼滤波的仿真结果 (36)3.5.2.2并行滤波仿真结果 (38)4.1简化卡尔曼滤波算法发展现状 (40)4.1.1常增益滤波 (40)4.1.2状态约减 (40)4.1.3分段卡尔曼滤波 (40)4.1.4解藕卡尔曼滤波 (41)4.2本文简化算法设计方法 (41)4.3模拟仿真 (44)4.3.1简化算法与未简化算法的精度比较 (44)4.3.2 K值组的数量对滤波结果的影响 (45)第五章对卡尔曼滤波的展望 (48)结论 (49)参考文献 (50)第1章绪论1.1课题研究的背景雷达目标跟踪是整个雷达系统中一个非常关键的环节。
卡尔曼滤波实验课作业

卡尔曼滤波作业系统的状态方程和观测方程(1)()()(1)()()x k Ax k Bx k Z k Cx k v k +=++=+101T A ⎡⎤=⎢⎥⎣⎦, 212B T T ⎡⎤=⎢⎥⎣⎦, []10C = T 为采样间隔,状态方程噪声()w • 是均值为零方差为()Q •的白噪声,观测方程噪声()v • 是均值为零方差为()R • 的白噪声,且与()w •不相关。
(1)给出T =1,Q =1,R =13,k =1:512时,位移和速度的估计值曲线。
(2)通过仿真,分析不同初值、Q 和R 对计算结果的影响。
设初始时刻状态的位置初值和方差阵初值为 0x 和0p 通过Kalman 滤波方程即可求得位置、速度。
Kalman 滤波方程:状态一步预测: k k x 1,-∧ = 1,-Φk k 1-∧k x状态估计: k x ∧= k k x 1,-∧+ Kk * ( Zk - Hk * k k x 1,-∧) 滤波增益: Kk = 1,-k k P * T Hk *( Hk * 1,-k k P *T Hk + Rk)1-一步预测均方误差: 1,-k k P = 1,-Φk k 1-k P 1,-Φk k T估计均方误差: k P = ( I – Kk * Hk )* 1,-k k P仿真结果及分析时间位置时间位置方差位置方差100200300400500时间速度速度100200300400500时间速度方差速度方差图1100200300400500时间位置位置100200300400500时间位置方差位置方差时间速度时间速度方差速度方差图2100200300400500位置位置100200300400500时间位置方差位置方差时间速度时间速度方差速度方差图3100200300400500时间位置位置100200300400500时间位置方差位置方差时间速度速度时间速度方差速度方差图4位置位置方差速度速度方差图5位置位置方差速度速度方差图6通过对采样曲线可以看出,不论初始方差怎样优化,由Kalman 滤波算法得到的位移、速度都是发散的,且对其发散的速度几乎没影响。
(完整word版)实验报告-卡尔曼滤波
数字信号处理实验报告姓名: 专业: 通信与信息系统 学号: 日期:2015.11实验内容任务一:一连续平稳的随机信号()t x ,自相关函数()tx er -=τ,信号()t x 为加性噪声所干扰,噪声是白噪声,测量值的离散值()k z 为已知,s T s 02.0=,—3.2,—0。
8,—14,—16,-17,—18,—3。
3,—2.4,-18,—0.3,—0.4,-0。
8,—19,-2.0,-1.2,-11,-14,—0.9,-0.8,10,0。
2,0。
5,-0.5,2.4,—0。
5,0。
5,—13,0.5,10,—12,0。
5,—0。
6,—15,—0.7,15,0.5,—0.7,—2.0,—19,-17,-11,—14,自编卡尔曼滤波递推程序,估计信号()t x 的波形。
任务二:设计一维纳滤波器。
(1)产生三组观测数据:首先根据()()()n w n as n s +-=1产生信号()n s ,将其加噪(信噪比分别为20dB ,10dB ,6dB ),得到观测数据() n x 1,() n x 2,() n x 3。
(2)估计() n x i , 1=i ,2,3的AR 模型参数。
假设信号长度为L ,AR 模型阶数为N ,分析实验结果,并讨论改变L ,N 对实验结果的影响。
实验任务一1.卡尔曼滤波原理1。
1 卡尔曼滤波简介早在20世纪40年代,开始有人用状态变量模型来研究随机过程,到60年代初,由于空间技术的发展,为了解决对非平稳、多输入输出随机序列的估计问题,卡尔曼提出了递推最优估计理论。
它用状态空间法描述系统,由状态方程和量测方程所组成,即知道前一个状态的估计值和最近一个观测数据,采用递推的算法估计当前的状态值。
由于卡尔曼滤波采用递推法,适合于计算机处理,并且可以用来处理多维和非平稳随机信号,现已广泛应用于很多领域,并取得了很好的结果。
卡尔曼滤波一经出现,就受到人们的很大重视,并在实践中不断丰富和完善,其中一个成功的应用是设计运载体的高精度组合导航系统.卡尔曼滤波具有以下的特点:(1)算法是递推的,且状态空间法采用在时域内设计滤波器的方法,因而适用于多维随机过程的估计;离散型卡尔曼算法适用于计算机处理.(2)用递推法计算,不需要知道全部过去的值,用状态方程描述状态变量的动态变化规律,因此信号可以是平稳的,也可以是非平稳的,即卡尔曼滤波适用于非平稳过程。
大学DSP作业3-卡尔曼滤波器
20XX年复习资料大学复习资料专业:班级:科目老师:日期:卡尔曼滤波器摘要:针对常规卡尔曼滤波器(KF)处理小噪声和变化噪声不足,提出了一种改进的自适应模糊卡尔曼滤波算法,该算法根据模糊推理输入量的变化特点建立一个新的非线性隶属度函数,取代了常用的三角形线性隶属度函数;然后利用模糊化后的等级和隶属度构造了步长调节函数,用于调节卡尔曼滤波算法中的误差,提高实际测量误差与理论测量误差间匹配程度。
仿真实验表明,较之传统的卡尔曼滤波,该方法在小噪声和变化的噪声情形下有效的克服了稳态误差,同时滤波算法的复杂程度。
关键字:模糊推理;卡尔曼滤波;自适应调节;补偿调节函数Abstract: in view of the conventional kalman filter (KF) processing small and changes in the noise, an improved adaptive fuzzy kalman filtering algorithm, the algorithm based on fuzzy reasoning, the change of the input features to create a new nonlinear membership functions, and replace the commonly used triangle linear membership functions; Then use blur hierarchy and membership degree was constructed after the step length adjustment function, is used to adjust the kalman filter algorithm of error, improve the matching degree between actual measurement error and measurementerror theory. Simulation experiments show that compared with the traditional kalman filter, this method in the situation of small and changes of noise effectively overcome the steady-state error, at the same time, the complexity of the algorithm.Key words: fuzzy inference; Kalman filter. Adaptive adjustment; Compensation adjustment function1引言在控制领域,70年代后产生的卡尔曼滤波方法[1]主要用于实时融合动态多传感器荣誉数据,对于现行模型系统,当其系统噪声与传感器的量测噪声均符合高斯分布时,卡尔曼滤波将提供唯一的统计意义下的最优估计。
卡尔曼滤波作业
一、卡尔曼滤波算法(The Kalman Filter Algorithm)首先,先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:X(k)=A X(k-1)+B U(k)+W(k)再加上系统的测量值:Z(k)=H X(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
A和B 是系统参数,对于多模型系统,他们为矩阵。
Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。
他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
下面我们来用他们结合他们的covariances 来估算系统的最优化输出。
首先我们要利用系统的过程模型,来预测下一状态的系统。
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:X(k|k-1)=A X(k-1|k-1)+B U(k) (1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance 还没更新。
我们用P表示covariance:P(k|k-1)=A P(k-1|k-1) A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卡尔曼滤波与组合导航作业四一、作业内容本实验的主要内容是完成基于卡尔曼滤波的INS/GPS 组合导航实验。
INS 的输出频率为100Hz ,GPS 的输出频率为20Hz ,通过GPS 给出的3个方向的位置和速度作为量测信息与惯导解算结果进行组合,完成组合导航,比较分析组合导航的结果。
二、系统分析与系统建模捷联惯导的解算过程这里不再赘述,直接从组合导航所需的模型开始建模。
1. 状态方程系统的状态方程由捷联惯导的误差方程和惯性器件的误差方程组成:X FX GW =+式中,状态变量E N U E N U x y z xX V V V L H φφφδδδδδλδεεε=∇⎡⎣y ∇Tz ∇⎤⎦,其中E φ、N φ和U φ为数学平台失准角,E V δ、N V δ和U V δ分别为东向、北向和天向速度误差,L δ、δλ和H δ分别为纬度误差、经度误差和高度误差;系统噪声过程噪声[]x y z x y z Tw w w w w w w εεε∇∇∇=,包括陀螺和加速度计的随机误差(不包括随机常值误差);系统噪声方差阵Q 根据SINS/GPS 组合导航系统的惯性器件噪声水平选取。
状态转移矩阵F 和系统噪声矩阵G 的具体形式为:N S99966966151500FF F ⨯⨯⨯⨯⨯⎡⎤=⎢⎥⎣⎦,n b 33n 33b 93931560000C G C ⨯⨯⨯⨯⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ F 矩阵中,n b 33S n 33b 3333960000C F C ⨯⨯⨯⨯⨯⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,NF 为对应惯导9个误差参数(3个姿态误差,3个速度误差,3个位置误差)的系统动态矩阵,它是(9*9)阶方阵。
其中非零元素可由惯导误差模型推导,具体为:3ie 5,1ie 2,32,4N ,7ie 3,1ie N 3,23,4M N 23,7ie 4243sin L L(cos L )(sin L tan L)1sin L cos L 1tan Lcos L sec LE E1,2ie 1,N N E1,2M N N M E 2N E,u,nN V tg R +hV f f R hV 1f f R +h R hV f f R +hR +hV f f R hV f f R hR hV f f f f f R hf ωωωωωω+==-++=-=-++=-==-=++==++=+=-+=N U4,44,5ie M M 2N 4,6ie 4,7ie N ie 5,1U5,3E54ie UN5,55,6M M 25,7ie sin L L)tan L 2sin L L(2cos L )2cos L sec L 2sin L ((2cos L sec L)EN E EUN N EN EN V tg R +hV V V f tg R h R hR +hV V V f f V V R h R hf f f f f 2V V f f R hR hV f R hωωωωωω+=-=+++=-+=++++==-=-=-=-++=-++,E6,1N6,2E6,4ie N 6,56,7E ie M 7,58,4M N 8,79,6N 2(cos L )22cos L 1sec L sec L tan L1EN EV f f f f V f R hV f f V R h f f R hR +hV f f R +hωω=-==++==-+==+==2. 量测方程SINS/GPS 组合导航采用松组合的方式,GPS 提供位置和速度信息,采用SINS 与GPS 的位置和速度之差作为卡尔曼滤波的量测信息。
量测方程:()()()()()()()v v p p H V t Z t H t X t V t X t H V t ⎡⎤⎡⎤=+=+⎢⎥⎢⎥⎣⎦⎣⎦式中,量测向量[]TE N U ()Z t V V V L h δδδδδλδ=,分别为捷联解算与GPS 的东向速度、北向速度、天向速度、纬度、经度和高度之差;[]E N U T()V V V L h V t v v v v v v δδδδδλδ=为量测噪声。
量测噪声方差阵R 根据GPS 的位置、速度噪声水平选取;量测矩阵[]TV P H H H =,其中:[]3339315[01110]v diag H ⨯⨯⨯=[]3636315[0cos 10]p MN diag R R L H ⨯⨯⨯=。
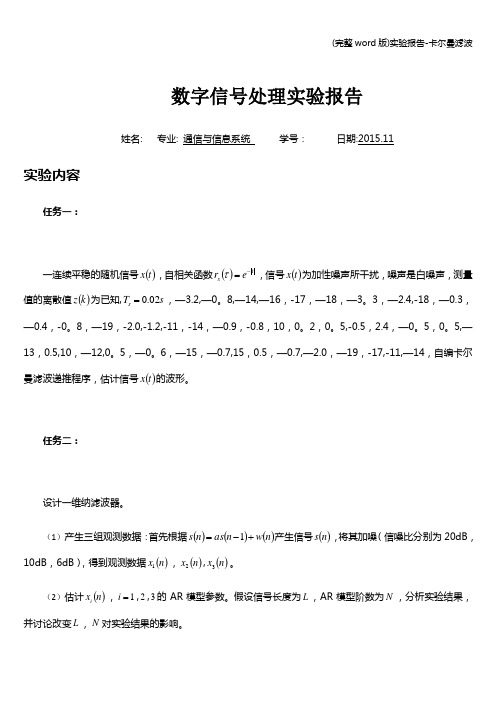
3. 卡尔曼滤波的流程为:状态一步预测与均方误差阵一步预测:/1/1k k k k k X X --=Φ/1/11/1Tk k k k k k k P P Q ----=ΦΦ+滤波增益阵计算:1/1/1()T T k k k k k K P H HP H R ---=+状态估计与均方误差阵估计:/1/1()k k k k k k k X X K Z HX --=+-/1()()T Tk k k k k k k P I K H P I K H K RK -=--+三、运行结果 1. 滤波参数设置a) 陀螺常值漂移:0.1度/小时;加速度计常值偏置:50ug ;b) GPS 位置测量误差:水平0.1m ,垂直0.15m ;速度测量误差:0.01m/s ; c) 初始姿态误差:航向30角分,俯仰/横滚60角秒; d) 初始速度误差:东向/北向/天向:0.05m/s ;e) 初始位置误差:水平位置误差2m ,垂直位置误差2m 。
2. 初始条件IMU 的初始姿态为:航向角为305.34023度(北偏东逆时针为正),俯仰角为0.25097度,横滚角为1.78357度;初始位置与初始速度为GPS 在第一个时刻的输出。
3. 运行结果50010001500200025003000350040003434.535时间/s 单位/°纬度对比5001000150020002500300035004000109109.5110时间/s 单位/°经度对比5001000150020002500300035004000020004000时间/s单位/m高度对比5001000150020002500300035004000-1000100时间/s 单位/(m /s )东向速度对比5001000150020002500300035004000-1000100时间/s 单位/(m /s )北向速度对比5001000150020002500300035004000-10010时间/s单位/(m /s )天向速度对比50010001500200025003000350040000200400时间/s 单位/°航向角对比5001000150020002500300035004000-20020时间/s 单位/°俯仰角对比5001000150020002500300035004000-20020时间/s单位/°横滚角对比500100015002000250030003500400034.234.434.634.835时间/s 单位/°纬度对比5001000150020002500300035004000109109.5110时间/s单位/°经度对比5001000150020002500300035004000-100-50050100时间/s 单位/(m /s )东向速度对比5001000150020002500300035004000-100-50050100时间/s单位/(m /s )北向速度对比05001000150020002500300035004000-101-3时间/s 单位/°东向失准角5001000150020002500300035004000-101-3时间/s 单位/°北向失准角5001000150020002500300035004000-0.0500.05时间/s单位/°天向失准角05001000150020002500300035004000-505-3时间/s 单位/(m /s )东向速度误差05001000150020002500300035004000-55-3时间/s 单位/(m /s )北向速度误差050010001500200025003000350040000.05时间/s单位/(m /s )天向速度误差05001000150020002500300035004000-505-8时间/s 单位/°纬度误差5001000150020002500300035004000-505-8时间/s 单位/°经度误差5001000150020002500300035004000-0.0500.05时间/s单位/m高度误差500100015002000250030003500400000.010.02时间/s单位/°东向失准角均方误差500100015002000250030003500400000.010.02时间/s单位/°北向失准角均方误差050010001500200025003000350040000.5时间/s单位/°天向失准角均方误差05001000150020002500300035004000234-3时间/s单位/(m /s )东向速度均方误差05001000150020002500300035004000234-3时间/s单位/(m /s )北向速度均方误差05001000150020002500300035004000234x 10-3时间/s单位/(m /s )天向速度均方误差05001000150020002500300035004000024-7时间/s 单位/°纬度均方误差50010001500200025003000350040005-7时间/s 单位/°经度均方误差50010001500200025003000350040000.050.1时间/s单位/m高度均方误差50010001500200025003000350040000.050.1时间/s单位/(°/h )东向陀螺漂移均方误差50010001500200025003000350040000.050.1时间/s单位/(°/h )北向陀螺漂移均方误差050010001500200025003000350040000.050.1时间/s单位/(°/h )天向陀螺漂移均方误差四、实验分析由于纯惯高度通道发散,因此上述结果在纯惯结果与GPS 结果或者组合导航结果比较时,仅仅给出经纬度与东向、北向速度的比对结果;而GPS 只能给出速度位置信息,因此姿态信息只有纯惯结果与组合导航结果比对。