浙江大学生物系统工程-生物生产机器人-复习整理
生物生产机器人考试资料
生物生产机器人去年试题(回忆版)1.写出系统分析的8个步骤(见教材)[1]Define a system and its objective.[2]Identify the descriptors of the system.[3]Establish the relationships among the descriptors.[4]Designate system performance indicators.[5]Develop a model to represent the system.[6]Verify and validate the model[7]Perform simulation with the model[8]Draw conclusions about the system2.自由度和工作空间的计算(和平时作业类似)First we need to calculate the operational space from top view and side view,then multiply them finally we got the operational space.Also the normalized volume index V n can be computed by V n=V/(4πL3/3)3.模糊控制的相关计算(与kondo教授资料上第58页题目类似)4.从5种机械手中取3种举例说明(见kondo资料上4-5页)5.表示颜色的几种方法(见kondo资料13-15页)Munsell Renotation:Chromaticity:L*a*b*:HSI(Hue,Saturation,Intensity):6.偏振光相关题目(稻田反射阳光和人站的位置的那道题,见kondo资料22页左上)7.根据所给图表简述不同物质的光学性质(见kondo资料24页中间的图)8.用镜头捕获对象位置的计算(与作业类似,见kondo资料26页、43页)题型以简答和计算为主,其他还有什么不记得了…复习建议:以kondo教授资料为主,教材上看一下讲过的部分,重点单词要会写,可以结合精品课程网站上的资料复习考试建议:尽量用英文作答;题目要能看懂;考试时间可能有点紧,需注意By HY祝好运。
浙江大学生物系统工程-生物生产机器人(实验1+2+感想)
⽣生物⽣生产机器⼈人⼼心得体会蒋昊铮 3120100277第⼀一次专业课由外国⽼老师任教,感觉⽅方式⾮非常有效。
课堂教学结合课堂当堂作业,课堂的节奏⾮非常紧凑,重要知识点均通过当堂作业得以有效的复习。
但是可能我们和⽼老师间语⾔言仍是存在⼀一些障碍,Kondo⽼老师考虑到我们的理解等因素,上课涉及的内容不是太深⼊入让⼈人觉得难以理解,课程是从更宽泛的⾓角度带我们领略了⽣生物⽣生产机器⼈人的世界。
我们通过这门课的学习,对ASABE机器⼈人竞赛需要的技能有了更全⾯面的了解。
课程中印象最深刻的是Kondo⽼老师在讲解机器视觉的时候讲到偏光与光晕等知识点的时候,他带我们下楼做了现场的⼩小实验,这个知识点其实以前也是学习过的,但是在经过那个⼩小实验之后,完全理解了这个知识点。
可能就是所谓的“实践出真知吧”。
第⼆二周Kondo⽼老师给我们上过⼀一节有关机器视觉⽤用winroof进⾏行图像处理的实验课,讲课⾮非常清晰,我们对处理的步骤都有了⾮非常熟练的掌握。
在后来的实验课上,需要⽤用matlab⽤用同样的步骤编程处理图形,按照Kondo⽼老师的思路,虽然是⾃自学,但是也学会了如何处理。
不变的是思想,最主要的也是思想,不同的⼯工具只是给赋予我们不同的⼿手段去实践。
多种⼿手段也给了我们未来以选择的机会,我们可以按照有效程度、⽅方便度、普适性以及个⼈人偏好等等⽅方⾯面选择未来处理图像的⽅方法。
除了课程中Kondo⽼老师的渊博的学术知识,他也是⼀一个⾮非常谦和、耐⼼心的⽼老师,很热⼼心地回答我们的各种问题,也⽀支持我们多多提问,可能课程中没有和Kondo⽼老师直接沟通,让我感到⾮非常遗憾。
他向我们介绍了他的祖国,让我对⽇日本,特别是京都产⽣生了⾮非常浓厚的兴趣,⾮非常希望有⼀一天可以到京都这⼀一⽚片古⽼老的⼟土地感受⼀一下那⾥里的⼈人⽂文⽓气息,欣赏美丽的樱花。
同时Kondo ⽼老师向我们介绍了京都⼤大学的历史背景与科研环境,我认为这是⼀一个学术⾃自由,尊尚学习的⼤大学环境,让我对京都⼤大学充满敬意。
浙江大学生物系统工程新能源工程复习整理2
新能源工程复习整理王永维老师部分【绪论】(一)、化石能源利用的环境问题颗粒物质、硫氧化物、氮氧化物、一氧化碳、碳氢化合物等。
1.二氧化硫污染与酸雨2.氮氧化物与光化学雾污染3.燃烧颗粒物污染颗粒物主要来源是燃烧煤炭、石油、天然气、生物质和废弃物的固定源以及燃用汽油、柴油的内燃机等移动源。
4.燃煤产生的其他污染a.微量有害元素b.有机污染物5.温室效应和全球气候变化(二)、能源、新能源和可再生能源的含义能源:能源是指人类用来获取能量的自然资源,即能够直接或经过转换而获取某种能量的自然资源,可以是物质,也可以是物质的运动。
新能源和可再生能源:即以新技术和新材料为基础,使传统的可再生能源得到现代化的开发与利用,用取之不尽、周而复始的可再生能源来不断取代资源有限、对环境有污染的化石能源,重点在于开发太阳能、风能、生物质能、海洋能、地热能和氢能等。
新能源和可再生能源在我国指除常规能源和大型水力发电之外的太阳能、风能、生物质能、小水电、海洋能、地热能和氢能等。
(三)、能源分类1.按来源不同分类(1).来自太阳的能量(包括直接的太阳辐射能外,还包括间接来自太阳能能源,如化石能源、生物能、水能、风能、海洋能等);(2).地球的本身蕴藏的能量资源(如地热能、核能等);(3).地球与其他天体相互作用而产生的能量(如潮汐能等)。
2.按形成条件分类(1).一次能源:指天然存在的、可直接利用的(如原煤、原油、天然气、水力、太阳能等);(2).二次能源:在一次能源基础上加工而成的(如电力、汽油、煤气、沼气、氢气等)。
3.按能源的使用与消耗分类(1).再生能源:即不会随它本身的转化或人类的利用而越来越少,如太阳能、风能、水力等;(2).非再生能源:它随人类的利用而越来越少,如煤炭、石油、天然气、核燃料等。
4.按开发使用的程度、技术状况分类(1).常规能源:指已被广泛利用的能源。
如煤炭、石油、天然气、薪柴燃料、水能等;(2).新能源:指未被广泛利用、正在研究开发、有待推广的能源。
浙江大学生物系统工程-生物生产机器人-实验报告1

实验报告课程名称:______生物生产机器人____________指导老师:____崔迪____成绩:__________________ 实验名称:______图像采集与处理____________实验类型:____实验室操作结合上机_______ 同组学生姓名:__吴文华 方小敏 邓敏娜 赵懿滢 李艺健 蔡杭杭________ 一、实验目的 二、仪器设备组成 三、实验步骤 四、图片处理过程 五、思考题一、 实验目的1.初步掌握数字图像采集方法; _2.初步掌握数字图像处理方法。
二、 仪器设备组成1.机器视觉系统;2.样本(每人一只,每组5-6人)。
三、 实验步骤1.开启机器视觉系统,予热5分钟;2.用本人的学号作为样本编号,给样本编号;3.每个用游标卡尺测量本人的水果横径,并作为真实值记录下来;4.调节镜头焦距,使图像清晰;5.采集图像,并按样本编号给对象的图像命名;实验名称:_______图像采集与处理________姓名:_____蒋昊铮______学号:____3120100277_________6.背景分割:将样本从背景中分割开来;7.边缘检测:提取对象边界。
四、图片处理过程(以1.1.bmp为例)1.合成图像分开为R/G/B灰度图像2.对红色层进行直方图分析,确定阈值。
3.阈值分割,边缘处理。
4.分析黑色背景与蓝色背景的阈值分割结果:左边的是黑色背景的阈值分割结果,右边的是蓝色背景的阈值分割结果。
黑色背景的阈值分割结果明显比蓝色的噪声点少,边缘更加圆滑,说明黑色背景上拍摄的橘子的效果更好。
5.源代码:合成图像分开为R/G/B灰度图像I1=imread('1.1.bmp');figure;imshow(I1);title('原图');I1R=I1(:,:,1);I1G=I1(:,:,2);I1B=I1(:,:,3);figure;imshow(I1R);title('原图中的红色层');figure;imshow(I1G);title('原图中的绿色层');figure;imshow(I1B);title('原图中的蓝色层');2. 直方图分析I=imread('11.bmp');[n,xout]=hist(I(:), 0:255);figure;bar(xout,n); xlim([0 255]);title('直方图1.1.bmp', 'FontWeight', 'Bold', 'Color', 'r');3.阈值分割,边缘处理t1 = 18; %从直方图的峰谷处得阈值;[m n]=size(I1R);I1=zeros(m,n);for i=1:mfor j=1:nif I1R(i,j)>t1I1(i,j)=1;elseI1(i,j)=0;endendendimshow(I1);DG=edge(I1);imshow(DG);五、思考题1.机器视觉系统的组成;工控机,触发器,图像采集卡,CCD摄像头,光照箱。
浙大农业生物环境工程考试复习
1.以下是题库2.Effect of bio-filter in a recirculating aquacultural system生物过滤器在循环养殖系统中的影响氨态氮浓度、溶解氧浓度、有机物含量、PH值与碱度、水温、水体的对流混合作用3.Exhaust ventilation?负压通风安装在空间一面墙壁上的风机(通常是负压风机)把室内的空气抽出部分,导致室内空气压力瞬时比大气压小或者说比常态压力小,此时空间的另一面(往往是安装负压风机的对面)开有进风口,外界空气在大气压压力下,自动进入空间。
因此在空间内形成定向、稳定的气流带。
4.livestock’s contribution to greenhouse gas emissions畜牧业对温室气体排放的贡献CO2(9%); CH4(37%); N2O(65%); NH3 (64%)5.the main pollutant from CAFOs集中式动物饲养经营的主要污染物Impact of Air Emissions from CAFOs•Air emissions from CAFOs present challenges to maintain healthy indoor environment: human and animal health, production efficiency•Air emissions from CAFOs cause significant environmental impacts: ambient air quality, atmospheric acidity and visibility, and global warming•Increased air quality regulations (EPA Consent Agreement with CAFOs, EPCRA, developing state regulations on H2S, NH3, and Odor ) created challenges for the viability and growth of the livestock and poultry industries6.Light in animal production光在动物生产中的作用对动物的进食时间产生影响;并能通过调节光强度控制猪舍的温度,影响猪的代谢消耗。
浙江大学生物系统工程-生物生产机器人-书本提纲
IntroductionN. Kondo and K. C. Ting1.1 Why Was this Monograph Written?Because most books related with robots are focus on industrial robot which is , and with considering of the complexion of bio robots, it is hard to manipulate the environment and bio-products1.2 What Is the Definition of a Bioproduction Robot?1.3 Necessity of the Bioproduction Robot1.4 Uniqueness of Bioproduction Robots1.4.1 Development of Bioproduction Robots1.4.2 Robot's Intelligence and Mind1.5 Overview of the MonographReferencesRobotics for Manipulating Biological ObjectsN. Kondo and K. C. Ting2.1 Work Objects of Bioproduction Robots2.2 Characteristics of Biological Objects2.3 Features of Bioproduction Robotics2.4 Expectations for Bioproduction Robots2.4. l Labor Saving and Substitution2.4.2 Extension of Human Capability2.4.3 New Production System with the Robot2.5 Multipurpose Robot for Bioproduction2.6 Bioproduction Robots: An Integration of Engineering,Biology, and Social Science ReferencesFundamentals and Basic Components of RobotsN. Kondo3.1 Fundamentals of Robots3.1.1 Servomechanisms3.2 Basic Components of Robots3.2.1 Manipulator 213.2.1.1 Mechanism of a Manipulator 213.2.1.2 Control of a Manipulator 223.2.1.3 Robot without a Manipulator 223.2.2 End-Effector 233.2.2.1 Mechanism of an End-Effector 233.2.2.2 Sensors for an End-Effector 233.2.3 Sensors 243.2.3.1 Sensors for a Bioproduction Robot 243.2.3.2 Classification of Sensors 243.2.3.3 Sensor Fusion 253.2.3.4 Future Robotic Sensors 253.2.4 Traveling Devices 253.2.5 Control Devices 263.2.5. 1 CPU 273.2.5.2 Memory 273.2.5.3 Peripheral Devices 283.2.5.4 Buses 283.2.6 Classification of Actuators 293.2.6.1 Electric Actuator 293.2.6.2 Hydraulic Actuator 293.2.6.3 Pneumatic Actuator 29References 30Design and Control of ManipulatorsN. Kondo4.1 Mechanism of a Manipulator 314.1.1 Cartesian Coordinate Manipulators 314.1.2 Cylindrical-Coordinate Manipulators 334.1.3 Polar-Coordinate Manipulators 334.1.4 Articulated Manipulators 354.2 Redundant Manipulators 354.3 Evaluation of Mechanism 374.3.1 Operational Space 374.3.2 Measure of Manipulability 384.3.3 Redundant Space and Posture Diversity 414.3.4 Space for Obstacle Avoidance 414.3.5 Accuracy of the Manipulator End 424.4 Manipulators for Bioproduction 434.4.1 Plant-training Systems 434.4.2 Fruit Vegetables Grown on a Vertical Plane 434.4.3 Fruit Tree Grown on a Sphere 534.4.4 Fruit Tree Grown on a Trellis Plane 544.4.5 Vegetables Grown on the Ground 554.4.6 Other Objects 554.5 Control of a Manipulator 564.5.1 2-DOF Polar Manipulator 564.5.2 2-DOF Articulated Manipulator 574.5.3 Geometric Solution of Joint Displacement for a 5-DOFArticulated Manipulator 594.5.4 Solution of Joint Angular Velocities for a 3-DOFArticulated Manipulator 604.5.5 Control of a Redundant Manipulator 61References 63Machine VisionY. Shirai, N. Kondo and T. Fujiura5.1 Image Acquisition5.1.1 Image Sensors5.1.2 TV Cameras5.1.3 Image Grabber and its Processing Device5.1.4 Luminaire5.2 Discrimination5.2.1 Method of Red-Green-Blue Signals5.2.2 Method of the Most Suitable Wavelength Band Based onSpectral Reflectance 5.3 Recognition5.3.1 Features from the Binary Image5.3.1.1 Fractal Dimension5.3.1.2 Thinning Processing5.3.1.3 Chain Coding5.3.2 Features from the Gray-Level Image5.3.2.1 Co-Occurrence Matrix5.3.3 Recognition Algorithm for a Biological Object5.4 Depth Measurement and Three-Dimensional Vision5.4.1 Depth Measurement5.4.1.1 Time of Flight5.4.1.2 Active Triangulation5.4.1.3 Stereovision5.4.1.4 Stereo Vision with Distinct Features5.4.2 Area-Based Stereo Vision5.4.2.1 Real-Time Area-Based Stereo Vision5.4.2.2 Feature-Based Stereo Vision5.4.2.3 Multistage Stereo with Matching Reliability5.4.3 Sensor Fusion5.4.3.1 Sensor-Fusion Categories5.4.3.2 Sensor Fusion for a Mobile Robot 925.4.3.3 Initial Range Data Processing 925.4.3.4 Knowledge Representation 935.4.3.5 Recognition by Sensor Fusion 935.4.4 Application to Bioproduction 955.4.4.1 Measurement of Fruit Location by BinocularStereo Vision 955.4.4.2 Three-Dimensional Vision Sensor that EmitsRed and Infrared Beams 965.4.4.3 Three-Dimensional Vision Sensor that EmitsOnly Infrared Beams 1015.4.4.4 Visual Feedback Control 1025.4.4.5 Depth Measurement by use of DifferentialObject Size 104References 1046 Sensors for Bioproduction RobotsM. Manta, N. Kondo and T. Fujiura6.1 External Sensors for Perception other than Vision 1096.1.1 Range Sensors 1096.1.1.1 Ultrasonic Sensor 1096.1.1.2 Position-Sensitive Device 1126.1.2 Proximity Sensors 1126.1.2.1 Photo sensing Type 1126.1.2.2 Pneumatic Type 1136.1.3 Tactile Sensors 1146.1.3.1 Touch Sensor 1146.1.3.2 Pressure Sensor 1156.1.3.3 Slip Sensor 1156.1.4 Ripeness Sensor for Fruit 1156.1.4.1 Photo Sensor 1156.1.4.2 Sonic Sensor 1166. 1.4.3 Gas Sensor 1166.1.5 Sensors for Robot Guidance 1176.1.5.1 Fixed Path 1176.1.5.2 Semi fixed Path 1176. 1.5.3 Free Path 1186.2 Internal Sensors for Mechanism Control6.2.1 Fixed-Position and Fixed-Angle Detection 1186.2.1.1 Micros witch 1186.2.1.2 Photoelectric Sensor 1196.2.2 Position and Angle Measurement 1206.2.2.1 Potentiometer 1206.2.2.2 Encoder 1226.2.3 Velocity and Angular Velocity Measurements6.2.3.1 Tachometer Generator6.2.3.2 Moving Magnet Velocity Sensor6.2.4 Acceleration Measurement6.2.4.1 Piezoelectric Acceleration Sensor6.2.4.2 Strain-Gauge Acceleration Sensor6.2.5 Inclination Measurement6.2.5.1 Photoelectric Inclination Sensor6.2.5.2 Electro Lytic-Liquid-Type InclinationSensor 6.2.6 Azimuth Measure1nent6.2.6.1 Gyroscope6.2.6.2 Geomagnetic SensorReferencesTraveling Devices within Bioproduction Environments M. Monta7.1 Wheel Type7.1.1 Characteristics and Mechanisms7.1.2 Applications for Bioproduction Environments 7.2 Rail Type7.2.1 Characteristics and Mechanisms7.2.2 Applications for Bioproduction Environments7.3 Crawler Type7.3.1 Characteristics and Mechanisms7.3.2 Applications for Bioproduction Environments7.4 Gantry System7.4.1 Characteristics and Mechanisms7.4.2 Types and Structure of Gantries7.4.2.1 Wide-Span Vehicle.7.4.2.2 Rail-Type Gantry7.5 Legged Robot7.5.1 Characteristics and Mechanisms7.5.2 Applications for Bioproduction Environments ReferencesRobots IntelligenceH. Murase, Y. Shirai and K.C. Ting8.1 Knowledge-Based Decision Support8.1.1 Heuristic Reasoning8.1.1.1Knowledge Representation8.1.1.2 Building a Knowledge Base8.1.1.3 Inference Engine8.1.1.4 Reasoning under Uncertainty 15 J8.1.1.5 Evaluation of Expert Systems 1518.1.2 In Relation to Bioproduction Robots 1528.2 Fuzzy Control for Dealing with Uncertainty 1528.2.1 Basic Fuzzy Theory 1538.2.2 Methods of Fuzzy Inference 1558.2.3 Expert System with Fuzzy Production Rules 1568.3 Artificial Neural-Network Applications for Robotics Systems 1598.3.1 Artificial Neural Networks 1608.3.2 Neural-Network Architectures 1628.3.2.1 Perceptron 1628.3.2.2 Hopfield Network 1638.3.2.3 Back-Error Propagation 1648.3.3 Kalman Filter Leaming 1658.3.4 Robot Control 169ReferencesRobots in Bioproduction within Controlled EnvironmentsN. Kondo, T. Fujiura, K.C. Ting, T. Okamoto and M. Monta9 .1 Micropropagation Robot9.1.1 Automation in Tissue Cultures9 .1.2 Process of Biotechnology9 .1.3 Plant Tissue Culture Proliferation Robot9. 1 .4 Orchid Protocorm Transplanting Robot9.1.5 Culture Seedling Proliferation-Transplanting Robot9 .2 Grafting Robot9.3 Cutting-Sticking Robot9.3. l Phytological Characteristics9.3.2 Robotic Cutting-Sticking System9.3.3 Cutting-Providing System9.3.4 Visual Sensor9.3.5 Leaf-Removing Device and Planting Device9.3.5.1 Leaf-Removing Device9.3.5.2 Planting Device9.4 Transplanting Robot9.4. l Work Object9.4.2 Equipment9.4.2.1 Plug Container9 .4.2.2 Conveyer Belts9.4.2.3 Robot9.4.2.4 End-Effector9.4.2.5 Sensing Devices9.4.2.6 Host Computer9.4.3 Operations9.4.4 Performance Indicators9.4.4.1 Workability and Productivity9.4.4.2 Plug Quality Preservationand Quantity Conservation9.4.4.3 Reliability, Complexity, and Safety9.4.4.4 Cost Effectiveness9.4.5 Example Cases9.5 Harvesting Robots in Greenhouses9.5.1 Tomato-Harvesting Robot9.5.1.1 Phytological Characteristics9.5.1.2 Manipulator9.5.1.3 End-Effector9.5.1.4 Sensor9.5.1.5 Traveling Device9.5.2 Cherry-Tomato-Harvesting Robot9.5.2.1 Physiological Characteristics9.5.2.2 Polar-Coordinate Robot9.5.2.3 Cherry-Tomato-Harvesting Robotas a Multi-operation Robot 9.5.3 Strawberry-Harvesting Robot9.5.3.1 Physiological Characteristics9.5.3.2 Manipulator9.5.3.3 End-Effector9.5.4 Cucumber-Harvesting Robot9.5.4.1 Physiological Characteristics9.5.4.2 Manipulator9.5.4.3 End-Effector9.5.4.4 Visual Sensor9.5.5 Mushroom-Harvesting Robot9.5.5.1 Physical Properties9.5.5.2 Manipulator9.5.5.3 End-Effector9.5.5.4 Visual Sensor9.6 Vegetable-Production Robots in Plant Factories9.7 Milking Robot9.8 Wool-Harvesting RobotReferencesRobots in Bioproduction in Open FieldsN. Kondo, T Fujiura, M. Monta and F. Sevila10 .1 Harvesting Robots10.1.1 Grape-Harvesting Robot in JapanI 0.1.1.1 Phytological Characteristics10.1.1.2 Manipulator10.1.1.3 End-Effector 23210. 1.1.4 Visual Sensor 23410.1 .1.5 Traveling Device 23410.1.2 Orange-Harvesting Robot in Japan 23510.1 .2.l Summer-Orange-Harvesting Robot 23510.1.2.2 Mandarin-Orange-Harvesting Robot 23610.1.3 Orange-Harvesting Robot in the U.S.A. 23710.1.4 Apple-Harvesting Robot in Korea 23810.1.5 Harvesting Robots for Apples, Oranges, and Grapesin Europe 241 10.1 .5.1 Fruit Detection in Complex Environment 24110.1.5.2 Modeling of Biological Objects 24310.1 .5.3 Interactive Operations between Sensorsand Actuators 245 10.1.5.4 Design of Manipulators for Bioproduction 24610.1.5.5 Traveling device 24710.1.5.6 Multi-sensing Mountings on Robots 24910.1 .5.7 Artificial Intelligence Implementations 25110.1.5.8 Plant Adaptation to Robots 25110.1.6 Watermelon-Harvesting Robot 25110.1.6.1 Manipulator 25210.1.6.2 End-Effector 25210.1.6.3 Visual Sensor 25310.1.6.4 Traveling Device 25410.1.7 Melon-Harvesting Robot 25410.1.8 Other Harvesting Robots 25410.1.8.1 Selective Harvesting Robot for Cabbage 25410.1.8.2 Autonomous Hay Harvester 25710.2 Robotic Tractors 25710.2.1 Geomagnetic Heading Sensor 25710.2.2 Photoelectric Sensor System 258I 0.2.3 Machine-Vision System 25810.2.4 Steering Control Method 25910.2.4.1 Path Planning 25910.2.4.2 Steering Controller 25910.3 Plant-Protection Robots 25910.3.1 Spraying Robot 25910.3.2 Fertilizing Robot 26010.3.3 Weeding Robot 26210.3.3.1 Weedi11g between Plants 26210.3.3.2 Weed Detection in a Lawn Field 26210.4 Multipurpose Robot for Grape Production 26310.4.1 Berry-Thinning End-Effector 26310.4.2 Bagging End-Effector 26410.4.3 Spraying End-Effector 26510.5 Multipurpose Robot for Vegetable Production10.5. I Leafy Vegetable Transplanting10.5.2 Weed Control10.5.3 Harvesting of Leafy VegetablesReferencesRobots in the Food IndustryK.C. Ting11.1 Introduction11.2 Soft-Fruit Packing11.3 Egg Candling11.4 Prawn Handling11.5 Meat Processing11 .5 .1 Breakup of Pork Carcasses11 .5.2 deboning of Beef Forequarters11 .5 .3 Handling of Poultry Products11.6 Filled-Pie Production11.7 Food Packaging11.8 Secondary Packaging and Palletizing11 .9 Meal-Ready-to-Eat Pouch Inspection11 .10 Institutional Food Service11.11 Environmental Chamber Moisture Absorbency Testing ReferencesRobots in the Food IndustryK.C. Ting11. l Introduction11.2 Soft-Fruit Packing11.3 Egg Candling11.4 Prawn Handling11.5 Meat Processing11 .5 .1 Breakup of Pork Carcasses11 .5.2 deboning of Beef Forequarters11 .5 .3 Handling of Poultry Products11.6 Filled-Pie Production11.7 Food Packaging11.8 Secondary Packaging and Palletizing11 .9 Meal-Ready-to-Eat Pouch Inspection11 .10 Institutional Food Service11.11 Environmental Chamber Moisture Absorbency Testing ReferencesSystem Analysis, Integration, and Economic FeasibilityK.C. Ting12. l Introduction12.2 Systems Analysis12.2.1 Fundamentals12.2.1.1 Define the System and Its Objective12.2.1.2 Identify Descriptors of the System12.2.1.3 Establish the Relationships among the Descriptors12.2. 1.4 Designate System Performance Indicators12.2.1.5 Develop a Model to Represent the System12.2.1 .6 Verify and Validate the Model12.2. 1. 7 Perform Simulation with the Model12.2. 1.8 Draw Conclusions about the System12.2.2 Application Example12.2.2. l Work cell Layout and AdvancementPattern12.2.2.2 Linear Speed of Robot Wrist12.2.2.3 Probabilistic Factors12.3 Engineering Economics12.3.1 Fundamentals12.3.2 Application Example 30612.3.3 Feasibility Analysis 30712.3.4 Parametric Analysis 30712.4 Systems Integration 31012.4.1 Meal-Ready-to-Eat Pouch Inspection Work cell 31012.4.2 Robotic Work cell for Quality Sorting of Somatic Embryos 312 References 3 19Index 321。
浙江大学普通生物学复习题超级版本
2011冬复习题1、动物的四大基本组织各有什么特征,结合实验了解重要的概念:尼氏体、软骨囊、软骨陷窝、哈佛氏系统、闰盘等。
(上皮组织:细胞排列紧密,细胞间质少;大部覆盖在身体表面或体内管腔囊的内表面;细胞有极性;无血管,神经末梢多。
结缔组织:形式多样,分布广泛。
肌肉组织:由成束的具有收缩能力的长形肌纤维(细胞)构成,是脊椎动物体内最丰富的组织,在动物的运动中发挥作用。
神经组织:神经细胞和神经胶质细胞构成,具有接受刺激(树突)和传导神经冲动(轴突)的功能。
尼氏体:神经细胞胞质内一种嗜碱性染料的小体,实际是成堆的粗糙型内质网。
存在于树突,不存在于轴突和轴丘(轴突起源的地方)。
软骨囊:陷窝周围有一层含硫酸软骨素较多的基质,称软骨囊。
软骨陷窝:软骨陷窝是位于软骨基质内的小腔。
哈佛氏系统:骨密质的构成单位。
以纵行于长骨骨干的多数血管为其中心的管伏构造,作为血管通路的直径为20—100 微米的中心管,称为哈佛氏管。
闰盘:心肌细胞之间的界限,在该处相邻的两细胞膜凹凸相嵌,细胞膜特殊分化,紧密连接或缝隙连接。
闰盘对兴奋传导有重要作用。
)2、比较3类肌细胞的结构特征。
骨骼肌(随意肌):主要附在骨骼上;肌细胞长圆柱状;为合胞体,多个核位于肌膜下;细胞质内有大量排列整齐的肌原纤维;有明显的横纹;受躯体神经支配。
心肌(不随意肌) :为心脏所特有;肌细胞短柱状或有分支; 单核或双核,位于细胞中心;有横纹,但不甚明显;有闰盘;受植物性神经支配,有自主节律性。
平滑肌(不随意肌):广布于内脏器官;肌细胞呈棱形或具多个突起;单核或双核,位于细胞中心;无横纹; 受植物性神经支配,有自主节律性。
3、★结缔组织分哪几类?它们的主要功能是什么?(疏松结缔组织: 疏松结缔组织在体内广泛分布,位于器官之间、组织之间以至细胞之间,起连接、支持、营养、防御、保护和创伤修复等功能。
致密结缔组织: 以纤维为主要成分的固有结缔组织,纤维粗大,排列致密,以支持和连接为其主要功能。
浙江大学生物系统工程生物系统设计技术-知识点整理
系统设计知识点整理第一章生物生态工程技术原理生态学是研究环境与生物相互关系的一门科学。
针对研究的对象不同,生态学可分为个体生态学、种群生态学、群落生态学和生态系统生态学。
但无论其层次水平如何不同,都是为了研究生物与环境之间的相互关系,或者是如何从系统化的角度来研究生物与环境物流、能流及相互之间关系的一门学科。
生态学研究的对象和内容生态学源于生物学,属宏观生物学范畴,但现代生态学向微观和宏观两个方向发展,一方面在分子、细胞等微观水平上探讨生物与环境之间的相互关系;另一方面在个体、种群、群落、生态系统等宏观层次上探讨生物与环境之间的相互关系。
现在生态学研究对象和内容可从以下几个方面来理解:(一)生态学是研究生物与环境、生物与生物之间相互关系的一门生物学分支学科1.如按现代生物学的组织层次来划分,生态学的研究对象为:基因、细胞、器官、有机体种群、群落、生态系统等,研究它们与环境之间的相互关系。
2.如按生物类群来划分,生态学的研究对象为:植物、微生物、昆虫、鱼类、鸟类、兽类等单一的生物类群,研究它们与环境之间的相互关系。
(二)生态学尽管向宏观和微观两个方向发展,但其研究中心为种群、群落和生态系统,属宏观生物学范畴。
*(三)生态学研究的重点在于生态系统和生物圈中各组分之间的相互作用系统的概念(system)1.定义系统论的创始人是奥地利的贝塔朗菲,系统是由相互作用和相互依赖的若干个组成部分结合而成的、具有特定功能的整体。
系统必须具备的三个条件:由二个以上的组分组成;组分之间有密切的联系;以整体方式完成一定的功能。
2.系统的结构特点系统都有边界。
系统具有层次性;即系统由若干个子系统组成,系统本身也是更大系统的子系统。
构成系统的组分间有一定的量比关系。
系统的组分在空间上有一定的排列位置关系。
美国著名的生态学家E.P.Odum给生态系统下的定义是:所谓生态系统,是指生物群落与生存环境之间,以及生物群落内生物之间密切联系、相互作用,通过物质交换、能量转化和信息传递,成为占据一定空间,具有一定结构,执行一定功能的动态平衡体。
浙江大学生物系统工程-生物生产机器人-卷子2
1.生物生产机器人的组成和性能与工业机器人相比有什么不同?答:首先,生物体的属性是各种各样且多变的,因而生物生产机器人在处理生物体时必须是灵活的、多功能的,在大多数情况下,当末端执行器与生物体相接触时柔性处理是必要的。
第二,在识别周围环境时常希望机器人具有一定程度的智能。
第三,机器人常要在非结构化的、苛刻的和变化的环境下作业。
第四,除了那些传统机器人所具备的安全装置之外,当生物生产机器人与操作人员一起作业时可能还需要一些特殊的安全装置。
最后,为使机器人能获得潜在的使用者的认可,它的操作界面必须简单,且货币投资要有成本效益。
2.比较北美、东亚和欧洲的生物生产系统的不同特点及对生物生产机器人的要求?答:在北美(美国和加拿大),常是只有很少农民的大型农场及用于大块田地的大型机械。
当机器人引入大型系统时,通过各种全球定位系统进行控制会很有效。
在这种系统中,由于是大型的单一作物区域,一个农场主所需的机器人数量比较少。
在东亚,主要是小规模的生物生产系统和有许多农民的密集型农业,在他们的生产系统中,优质产品是在较小区域里耗费大量的劳力、精力和时间获得的。
东亚的褶皱地型形成了各种小平原、丘陵、流域、小山、温室和植物工厂,还有在这些区域的各种各样的环境条件。
为了获得较高的产量和质量,必须在适宜的季节和区域种植适宜的生物种类。
在一个含多种种植地型的生产系统,需要一个单操作器多机器人(one-operator-several-robots)系统。
欧洲的情况在东亚和北美之间。
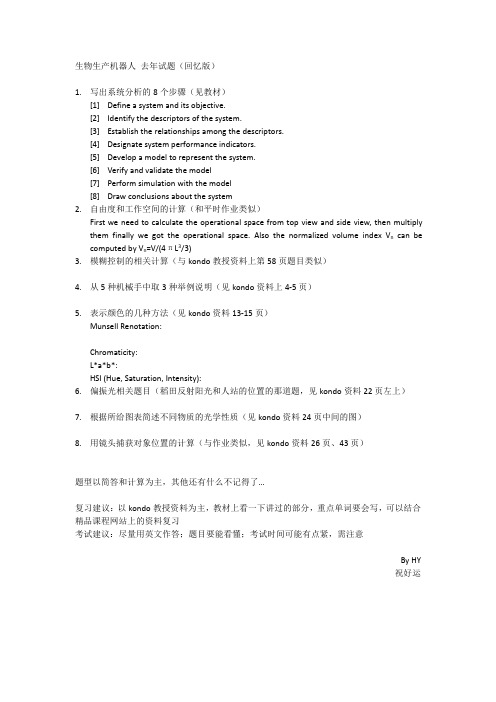
3.生物生产机器人开发的三大推动力是什么?答:(1) 工程理论和技术,包括机械学、电子学、机器视觉、模糊控制、人工智能、神经网络等;(2) 生物科学,包括因为植物学、动物学、食品科学、生物原料加工过程等;(3) 社会科学,如经济学、管理学、市场学和公共接受程度。
4.机器人主要由几部分组成,对每部分进行简要介绍?答:机器人主要由机械手、末端执行器、传感器、移动装置、控制装置和执行机构组成。
生物工程设备考试知识点必看

生物工程设备第一章绪论●生物工程设备(bioengineering equipment):就是生物工程类工厂或实验室为生物反应提供最基本也是最主要的能够满足特定生物反应工艺过程的专门技术装备或设施。
即为生命体完成一定反应过程所提供的特定环境。
●生物工程设备是现代生物技术的基本原理与工程学原理相交叉的应用性学科,是将生物技术成果产业化的桥梁。
●吕文虎克发明显微镜、柯赫建立了微生物分离纯化和纯培养技术、弗莱明发现了青霉素,并确认青霉素对伤口感染更有疗效●通风搅拌发酵技术的建立标志着实现了真正意义的生物工程设备;代表:青霉素●对通气搅拌生物反应器进行了改造,发展了气升式反应器,设备向着大型化、自动化发展●20 世纪70 年代基因重组技术诞生;代表产物是胰岛素第二章原料处理及灭菌设备●目前常用的处理方法有:筛选法、比重法、浮选法、磁选法●预处理包括:筛选去杂、磁力除铁、精选分级、原料粉碎●筛分机械原理:根据颗粒的几何形状及其粒度,利用带有孔眼的筛面对物料进行分选的机器,具有去杂、分级两个功能●网目:以每英寸长度内的筛孔数表示,称为网目数,简称网目,以M表示●振动筛:发酵工厂应用最为广泛,带有风力除尘功能的筛选设备,多用于清除物料中小或者轻的杂质。
●滚筒筛分类有 1.并列式:颗粒直径分布均匀;2,串联式:小颗粒含量较多的;3.同轴式:大颗粒含量不多的物料●重力分选原理:干重重力分选、湿重重力分选●湿重重力分选利用不同密度的颗粒在水中受到的浮力及下降阻力的差异进行分选的。
●典型重力分选机械粒状原料密度去石机采用干法重力分选块根原料除石机该设备通常采用湿法重力分选●精选设备常用的有滚筒式精选机、碟片式精选机、螺旋球度精选机●螺旋球度精选机从长颗粒中分离出球形颗粒●粉碎的理论模型(a)体积粉碎模型(b)表面粉碎模型(c)均一粉碎模型●粉碎:粉碎是固体物料尺寸由大变小的过程,是利用机械力来克服固体物料内部凝聚力使之破碎成符合要求的小颗粒的单元操作。
生物工程设备复习问答
1-绪论1.什么是工业生物技术?工业生物技术是利用生化反应进行工业品的生产加工技术,是人类模拟生物体系实现自身发展需求的高级自然过程。
以生物催化剂为核心内容的工业生物技术是继医药生物技术、农业生物技术之后,国际生物技术发展的“第三次浪潮”。
2.生物工程设备的作用是什么?利用生物技术手段将原料转化为产品,包含了一系列的生物反应过程、化学反应过程和物理操作过程。
这些反应过程和操作过程具有不同的生产工艺条件,需要在不同的反应设备和操作设备中进行,按照不同的方式进行排列、组合构成不同的生物技术生产流程。
因此,随着生物技术的迅猛发展,离不开生物工程设备的研究、开发;生物工程设备的发展又可以极大地促进生物技术产品的开发和生产。
可以说,生物工程设备在现代生物技术产业中具有十分重要的地位,对生物技术的发展有巨大的促进和推动作用。
3.生物工程设备的发展趋势?①开发符合要求的新型材料;②改进反应器设计,使之在流体力学及几何学等方面更接近生理状态,并根据某种细胞的培养过程或细胞的某种培养方式,开发动植物细胞专用反应器;③将反应器培养技术、现代仪器分析手段和智能专家控制系统进行集成,实现植物组织大规模培养过程的在线优化控制和自动化;④开发出适合不同产物的分离提取且可提高分离提取效率的生物工程设备。
2-生物质原料筛选与分级设备1.机械粉碎的工作原理有哪几种形式?挤压、冲击、研磨、劈碎、剪切2.为何要进行原料预处理?原料预处理的方法有哪些?①杂质会造成机械磨损。
在粉碎过程中使粉碎机的筛板磨损,运转部位磨损毁坏。
②影响反应过程和生产过程。
例如,影响产物的分离,损坏生产设备;蒸馏过程中在蒸馏塔中沉积,阻塞溢流管路。
方法主要包括:分级、除杂、粉碎、清洗。
3.原料粉碎的目的和常用的设备有哪些?在生产中,为了使原料顺利溶解、混合,加速后续的生物反应和化学反应的速度,对于使用固体的生物质原料,需要将其破碎、研磨,使大块物料破碎成小块或粉末物料。
(生物科技行业类)浙江大学普通生物学复习题(动物学部分XXXX年冬)

浙江大学动物学2011冬复习题1、★结缔组织分哪几类?它们的主要功能是什么?答:结缔组织分为六类,疏松结缔组织,致密结缔组织,脂肪组织,软骨组织,骨组织,血液。
疏松结缔组织中的成纤维细胞对伤口愈合有重要作用;巨噬细胞能吞噬侵入体内的异物、细菌、病毒以及死细胞及其碎片等,是细胞免疫系统的成员,起保护作用;肥大细胞(mast cells)能分泌一种物质,防止血液凝结;脂肪组织:起支持、保护的作用,以及维持体温和贮藏能量、参与能量代谢等作用;软骨组织主要起支持作用。
骨组织主要起支持的作用;血液主要起为全身的组织细胞运输能量、氧气和代谢废物的作用。
2、★脊索动物的重要特征是什么?分为几个亚门?并分别列举几个代表种类。
(1). 具脊索。
脊索位于消化道的背面,神经管的腹面,是一条具弹性、不分节、起支持作用的棒状支柱。
源于胚胎期的原肠背壁,经加厚、分化、外突,最后脱离原肠而成。
(2). 具背神经管。
背神经管位于脊索的背面,呈管状,其内部具有管腔,神经中枢位于其中。
背神经管由胚体背中部的外胚层下陷卷褶所形成。
(3). 具咽鳃裂。
咽鳃裂为咽部两侧一系列成对的裂缝,直接或间接与外界相通。
低等水栖种类的咽鳃裂终生存在,作为呼吸器官。
陆栖高等脊索动物仅在胚胎期或幼体期(如蝌蚪)具有鳃裂,发育成熟后,完全消失。
(脊索动物与无脊椎动物还有以下差别:脊索动物的心脏及主动脉位于消化道的腹面,循环系统为封闭式。
极大多数脊索动物若有尾部,总在肛门后方,称为肛后尾。
)分三个亚门:尾索动物亚门——海鞘,头索动物亚门——文昌鱼,脊椎动物亚门——七鳃鳗(圆口纲)、鲨鱼,豹鲨,孔鳐、黄鳝(鱼纲),蝾螈,大鲵(娃娃鱼)玳瑁,眼镜蛇(爬行类)。
3、★动物的消化方式有哪几种?并以具体动物为例分别说明。
细胞内消化和细胞外消化。
细胞通过胞饮和吞噬作用形成食物泡,食物泡在细胞内移动,与溶酶体融合,成为次级溶酶体,食物在次级溶酶体中,分解酶将食物分解为可透过食物泡周围膜的简单分子,这些分子通过膜进入细胞内供细胞新陈代谢之用,不能利用的残渣被排出细胞之外,这就是细胞内消化。
浙江大学生物工程学复习提纲
1.名词解释(1) 基因组(genome)The sum of all the genes and intergenic DNA on all the differentchromosomes of a cell is referred to as the cellular genome.(2) DNA测序法Sanger (dideoxy) method:以DNA单链作为模板,加入DNA聚合酶和四种dNTP,分别加入少量的ddNTP,在聚合酶的作用下,ddNTP随机掺入复制链中,由于ddNTP的3’端没有羟基,加入后终止聚合反应,形成不同长度的DNA片段。
将这些寡核苷酸片段进行电泳分析(能区分长度仅差一个核苷酸),并用35S放射自显影,读出DNA上的核苷酸序列。
(3) RFLP(p123 of Gene VI)RFLP (restriction fragment length polymorphism )限制性片段长度多态性(限制性片段指“限制性内切酶酶切片段”)即同种不同个体的基因组在用同一种限制性内切酶作用时,限制性酶切图不同的现象。
〔限制性酶切图与基因功能无关,它的多态性也不一定导致表现型的改变,可以作为genetic marker〕(4) SNP(Single nucleotide polymorphisms)SNP指基因组水平上由单核苷酸改变引起的DNA序列多态性。
它是人类可遗传变异中最常见的一种,占所有已知多态性的90%,是遗传变异的关键指标。
SNP在人类基因组中广泛存在,平均每500到1000个碱基对就有一个SNP发生,估计总数可达300万个,甚至更多。
SNP既能在编码区又能在非编码区中发生。
总的来说,位于编码区的SNP(coding SNP)较少,但它在遗传性疾病研究中却具有重要意义。
由于特殊基因上的SNP很可能对疾病易感性、对于环境因子和药物的反应有所作用,所以引起了许多科学家和制药公司重视。
浙江大学生物系统工程-生物系统模拟-期末整理
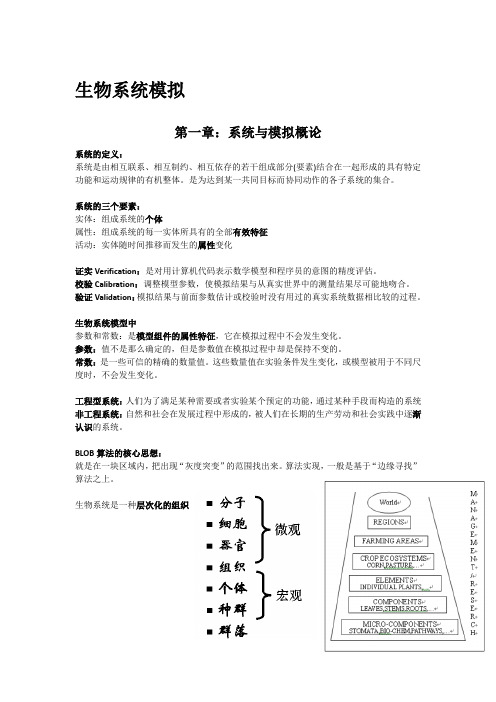
生物系统模拟第一章:系统与模拟概论系统的定义:系统是由相互联系、相互制约、相互依存的若干组成部分(要素)结合在一起形成的具有特定功能和运动规律的有机整体。
是为达到某一共同目标而协同动作的各子系统的集合。
系统的三个要素:实体:组成系统的个体属性:组成系统的每一实体所具有的全部有效特征活动:实体随时间推移而发生的属性变化证实Verification:是对用计算机代码表示数学模型和程序员的意图的精度评估。
校验Calibration:调整模型参数,使模拟结果与从真实世界中的测量结果尽可能地吻合。
验证Validation:模拟结果与前面参数估计或校验时没有用过的真实系统数据相比较的过程。
生物系统模型中参数和常数:是模型组件的属性特征,它在模拟过程中不会发生变化。
参数:值不是那么确定的,但是参数值在模拟过程中却是保持不变的。
常数:是一些可信的精确的数量值。
这些数量值在实验条件发生变化,或模型被用于不同尺度时,不会发生变化。
工程型系统:人们为了满足某种需要或者实验某个预定的功能,通过某种手段而构造的系统非工程系统:自然和社会在发展过程中形成的,被人们在长期的生产劳动和社会实践中逐渐认识的系统。
BLOB算法的核心思想:就是在一块区域内,把出现“灰度突变”的范围找出来。
算法实现,一般是基于“边缘寻找”算法之上。
生物系统是一种层次化的组织系统的环境:包括除了系统组件以外的任何事物。
系统的边界:是对系统组件进行限定的一个抽象,它把系统组件从环境中分离出来。
很多生物系统模型的一个特点:环境不会被系统影响,也就是说,我们一般不再对环境建立模型模型:是所研究的系统、过程、事物或概念的一种表达形式,也可指根据实验、图样放大或缩小而制作的样品。
系统模型定义:是系统的数学表达。
对相应的真实对象和真实关系中那些有用的和令人感兴趣的特性的抽象,是对系统某些本质方面的描述,它以各种可用的形式提供被研究系统的信息灰箱模型:在系统的主要层次和主要关系使用结构模型,在次要层次和次要关系中则使用统计学模型。
生物工程设备复习总结问答.doc

什么是工业生物技术?工业生物技术是利用生化反应进行工业品的生产加工技术,是人类模拟生物体系实现自身发展需求的高级自然过程。
以生物催化剂为核心内容的工业生物技术是继医药生物技术、农业生物技术之后,国际生物技术发展的“第三次浪潮‘:生物工程设备的作用是什么?利用生物技术手段将原料转化为产品,包含了一系列的生物反应过程、化学反应过程和物理操作过程。
这些反应过程和操作过程具有不同的生产工艺条件,需要在不同的反应设备和操作设备中进行,按照不同的方式进行排列、组合构成不同的生物技术生产流程。
因此,随着生物技术的迅猛发展,离不开生物工程设备的研究、开发;生物工程设备的发展又可以极大地促进生物技术产品的开发和生产。
可以说,生物工程设备在现代生物技术产业中具有十分重要的地位,对生物技术的发展有巨大的促进和推动作用。
生物工程设备的发展趋势?%1开发符合要求的新型材料;②改进反应器设计,使之在流体力学及几何学等方面更接近生理状态,并根据某种细胞的培养过程或细胞的某种培养方式,开发动植物细胞专用反应器;③将反应器培养技术、现代仪器分析手段和智能专家控制系统进行集成,实现植物组织大规模培养过程的在线优化控制和自动化;④开发出适合不同产物的分离提取且可提高分离提取效率的生物工程设备。
1. 机械粉碎的工作原理有哪几种形式?挤压、冲击、研磨、劈碎、剪切2. 为何要进行原料预处理?原料预处理的方法有哪些?%1杂质会造成机械磨损。
在粉碎过程中使粉碎机的筛板磨损,运转部位磨损毁坏。
%1影响反应过程和生产过程。
例如,影响产物的分离,损坏生产设备;蒸馆过程中在蒸馆塔中沉积,阻塞溢流管路。
方法主要包括:分级、除杂、粉碎、清洗。
3. 原料粉碎的目的和常用的设备有哪些?在生产中,为了使原料顺利溶解、混合,加速后续的生物反应和化学反应的速度,对于使用固体的生物质原料,需要将其破碎、研磨,使大块物料破碎成小块或粉末物料。
这样可以提高下一工序和发酵等的效果和效率,例如增加受热面积,增加糖化速度。
机器人基础 期末复习
1、根据各个国家对机器人的定义,总结各种说法的共同之处,机器人应该具有以下特性:1 )种机械电子装置。
2 )动作具有类似于人或其他生物体的功能。
3)可通过编程执行多种工作,具有定的通用性和灵活性。
4)具有一定程度的智能,能够自主地完成一些操作。
2、机器人是“制造业皇冠顶端的明珠”,其研发制造和应用是衡量一个国家科技创新和高端制造业水平的重要标志。
“机器人革命”有望成为“第四次工业革会”的切入点和增长点,本书将看重讨论工业机器人的结构、控制和应用等问题。
3、1940年,-位名叫J saac As imov的科幻作家首次使用了Robotics (机器人学)来描述与机器人相关的科学,并提出了“机器人学三原则”。
这三条原则如下:1 )机器人不得伤害人或由于故障而使人遭受不幸。
2)机器人必须服从于人的指令,除非这些指令与第一-原则相矛盾。
相矛盾。
3)机器人必须能保护自己的生存,只要这种保护行为不与第或第二原则。
4、新一代工业机器人正在向智能化、柔性化、网络化、人性化和编程图形化方向发展。
5、一般来说, -个机器人系统由机械结构、控制器、传感器、驱动系统和作业信息等几部分组成。
机械结构:包括机器人本体、传动机构和执行机构,主要实现机器人运动和力的传递;控制器:主要是对机器人模型、环境模型、工作任务和控制算法的分析与实现,以及实现人机的交互;传感器:包括内部传感器和外部传感器,主要实现对机器人内部状态和外部环境的监控;驱动系统包括驱动器和伺服系统,驱动器是机器人的动力源.可以是气动的、液压的或电动的;作业信息:主要实现对作业对象、作业顺序等信息的分析与处理。
6、机器人一般都由四个主要部分组成:①机械系统;②传感系统;③驱动系统;④控制系统。
机械系统包括传动机构和由连杆集合形成的开环或闭环运动链两部分。
连杆类似于人类的大臂、小臂等,关节通常为移动关节和转动关节。
移动关节允许连杆做直线移动,转动关节允许构件之间产生旋转运动。
机器人复习题及参考答案

课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
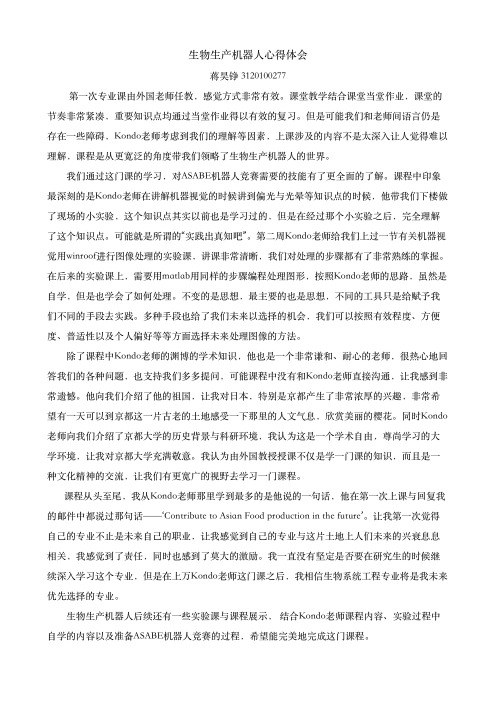
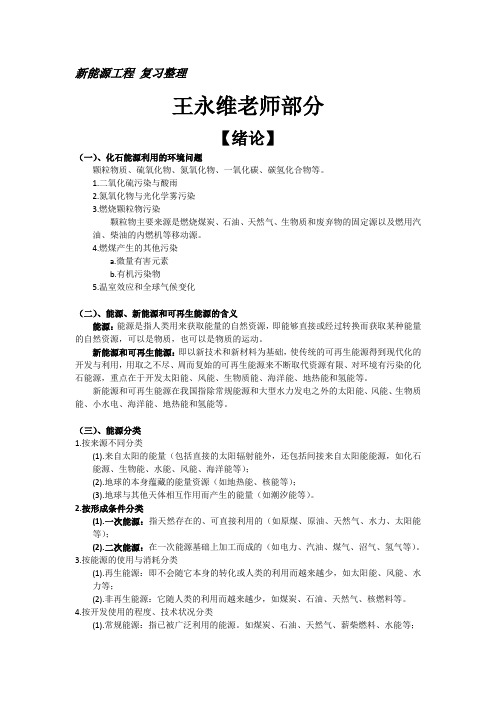
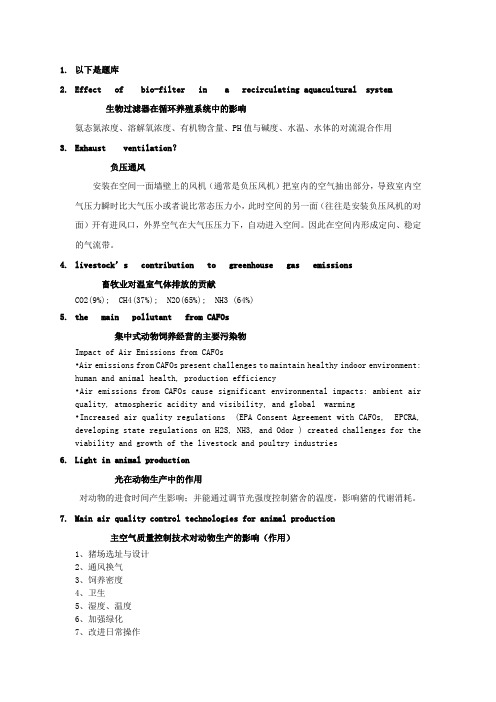
Definition of a bio-production robotBio-production robot is a machine system, with or without a manipulator, is able to work in some area people cannot reach and bear or operate some task more efficiency than human. It has its own control algorithm and sensing system to manage a human intelligence.Why necessary?1. Some task are not suitable to human but require human intelligenceto perform.2. The availability of farming labor is decreasing quickly in recent years.3. Labor shortage result in the increasing of workforce cost, making aincreasing of this robot demanding.4. The demanding of product quality and quantity has become animportant factor in bio-production and economic.Main physical properties of biological objectsBasic physical properties are shape, size, mass, density, surface texture; Dynamic properties are cutting resistance, frictional resistance, elasticity and viscostiry;Optical properties are reflectance and transmittance;Sonic properties are vibration property and wave propagation;Electrical properties are electrical resistance, capacitance and static electrical property.Features of bio-production robot1. Needs to be flexible and versatile in handling objects.2. Has the intelligence to recognize the surrounding of the objects.3. Able to work in a changeable, unstructured environments.4. Safety assurance is available when working with human in tandem.5. Easy to operate by human and cost effective in its monetaryinvestment.Difference between bio-production robot and industrial robot.Industrial robot is good at handling objects with regular and static properties, but bio-production robot is often required to manipulate object of various properties.This image shows that designing a bio-production robot need to consider fields of social science, biotechnology horticulture and engineering. Engineering …Social science …Biotechnology horticulture …Then I need to illustrate each part of this images and would better to give out the connection and influence of that field.Components of bio-production robot (robotic hand should be developed based on as follows)1. Manipulator: to carry out the task for the machine2. End-effector: to play a similar role of human hand at the end ofmanipulator3. Sensors: to detect the environments conditions or objects’properties4. Traveling device: set up an bigger operation space of themanipulator5. Control device: to control the robot components6. Actuator: to simulate or provide power for the robot.Advantages of digital machine vision system.Human vision system:1. Recognize and synthesize an image scene2. Extremely intelligent in image recognition and interpretation ofscenes and objects even in a terrible environment or withincomplete information with the help of incredible intelligence ofbrain.3. Limitation: only can recognize in visible region(400-700nm) and notable to make the feature quantification.Digital machine vision systems:1. Receive light in a wider region, even out of visible region.2. Provide quantified information of object’s feature.3. Suitable for repetitive tasks in an stable condition.Key components of it:1. Electronic camera, to convert image with the same function ofhuman eyes.2. Image acquisition board: act as the analog and digital interfaces.3. Computer: act as human brains.4. Lighting system: supply light.5. Software: analyze the information already collected.Spectral reflectance of one bio-production:You need to illustrate the image with following aspects:1. You would better to consider both x axis and y axis to analyze thedifference2. If you are asked to separate two objects, you would better to findout the biggest difference in their spectrums and describe youdecision.Encorder:Position-sensitive device (PSD)The reflect light from an object is focus by a lens and become a small imageon the sensitive surface of the PSD. Then we can confirm the images’position confirmed by the electricity difference of two anodes. And after analyze and calculate the ratio of two current intensities, we can know the distance of the object.Common types of photoelectric sensorsCommon photoelectric sensor consisted by two elements, a light beam transmitter with a LED and a receiver composed of a photodiode or a phototransistor.In Through beam type, transmitter and receiver are set separately and facing each other. This system allows the detection of any object break the optical path, suitable for long-range, up to 30m.In reflex type, object break the optical path too, but the transmitter and receiver are set together with a same direction. The light beam will reflected by a reflector set in distance. It is suitable for medium-range region from 0.1 to 10m.In diffuse type, receiver detect the light diffused by the surface of object. The object should close the detector. And the detect distance ranges from 5cm to 2m and only for some object capable in reflect such as glasses.type Detected object Detection rangeThrough-Opaque and0~30mbeam type reflective objectsReflex type Object that Breaksthe reflected beam0.1~10mDiffuse type Object that reflectsthe light beam and isclose to a sensor unit5cm~2mEight step to analyze a system[1] Define a system and its objective.[2] Identify the descriptors of the system.[3] Establish the relationships among the descriptors.[4] Designate system performance indicators.[5] Develop a model to represent the system.[6] Verify and validate the model[7] Perform simulation with the model[8] Draw conclusions about the system1. 自由度和工作空间的计算(和平时作业类似)First we need to calculate the operational space from top view and side view, then multiply them finally we got the operational space. Also the normalized volume index V n can be computed by V n=V/(4πL3/3)2. 模糊控制的相关计算(与kondo教授资料上第58页题目类似)3. 从5种机械手中取3种举例说明(见kondo资料上4-5页)4. 表示颜色的几种方法(见kondo资料13-15页)Munsell Renotation:This model define a color by hue, intensity and saturation. Hue has10 colors, intensity has 10 degrees and saturation has 14 degrees.Chromaticity:In this model, we need first calculate X, Y and Z by their own functions regard colors’ significance respectfully of red, green and blue.Then, plus X, Y and Z and calculate the ratios of X, Y and Z. After that, wegot parameter x, y and z. x + y + z =1. And drawing points on the coordinate system of x axis and y axis.L*a*b*:This model define a color by L* axis, a* axis and b* axis. Three axis parameters are calculated by X, Y and Z mentioned before.HSI (Hue, Saturation, Intensity):HIS define a color by the point in an cylindrical model, which composed by H, S and I. H is the polar angle from top view. S is the modulus from top view. I is the vertical scale.5. 偏振光相关题目(稻田反射阳光和人站的位置的那道题,见kondo资料22页左上)6. 根据所给图表简述不同物质的光学性质(见kondo资料24页中间的图)7. 用镜头捕获对象位置的计算(与作业类似,见kondo资料26页、43页)Manipulator:DOF: degree of freedomCartesian coordinate type: prismatic joints for position determination. Cylindrical coordinate type: 2 prismatic joints and 1 rotational joint for position determination.Polar coordinate type: 1 prismatic joint and 2 rotational joints.Articulated type: 3 rotational joints for position determination. Mechanism of manipulator is defined byDOFType of jointLink lengthOffset lengthJoint:1. prismatic joint2. rotational jointThe DOF of arm is 7. Shoulder is 3, elbow is 1-2, and wrist is 2-3. Evaluation indices:1. Operational space2. Measure of manipulability3. Posture diversityViscoelastic property:1. Elasticity limit 弹性极限2. Yield point 应力屈服点,恢复不了了3. Rupture point 破掉了Fundamentals of light:1. Quantity of light2. Luminous intensity3. Brightness4. Intensity of illuminationLamps:1. Halogen2. Incandescent3. Fluorescent: lower color rendering, 250nm UV light causesfluorescence reaction4. LED5. HIDColor temperature:Different color temperature will have different wavelength distribution, which divided into 3 regions. They are B, G and R.Why is the sunset color red?According to Rayleigh’s Scattering theory, light will go through a longer path at dusk then at middle of day. Color is diffused in this process and energy is decreased. Red color’s photon has lower level of energy and it has a longer wavelength which make it easy to diffraction. So, the sunset color is red.Why leaves green?Because the chlorophyll contained in leaf cell reflected the color at green’s wavelength region.Advantage of optical fiber:Easy replacement of fiber and adapting object shape.垂直:Vertical偏振镜:Polarizer偏振角: Angle of polarization棱镜:prism单色玻璃:single color glassCCDMOSFluorescence:Fluorescence is the emission of light by a substance that has absorbed light or other electromagnetic radiation.Actuators:Electric actuator: DC motor, AC motor, Stepping motor, Servo motor, SolenoidHydraulic actuator: Hydraulic cylinder, hydraulic motorPneumatic actuator: air cylinder, air motorSMA(shape memory alloy) actuatorSensor classification:Internal sensors: joint angle position, velocity, armconfugurationExternal sensors: sense object color, position, distance, existenceLimit switchThe principle of strain gauge 压扁和拉长原理Touch sensor:Flexible rod lever typePush-ON typePush-OFF typePressure sensor: electrodes attached in up and down surfaces. And conductive rubber between them.Ultrasonic sensor 两个接收器测角度就知道距离L了,用在cutting height control上Laser sensor 一个projector 两个mirror,下面那个可以转磁场:Magnetic field电流:currentTerahertz: 太赫兹1012HZSpectrum detection:Reflection typeTransmittance typeSemi-transmissive1.Why is the bioproduction robot necessary?Answer:(1) Although many agricultural operations have been mechanized, there are stillmany treacherous, laborious,and monotonous tasks that are not suited for humanbeings,but require certain human like intelligence to perform;(2) The availability of the farming workforce is decreasing at an alarming rate inmany countries.Compared With many other industries, agriculture is lessattractive for the younger generation,as indicated by recent trends.This meansthat the supply of human resources for farming will continue to decrease in theforeseeable future.The development of bioproduction robots,especially the kindwith expert knowledge,can serve to preserve some farming expertise;(3) The problem of labor shortage frequently results in rising labor costs,if the production is to continue;(4) The market demand for product quality has become an important factor in bioproduction.Quality evaluation of products has relied mainly on human judgment.2.How to analysis the colors feature of a fruit?Answer:(1) Open a fruit image.(2)Split the fruit image into R, G and B component (or Chromaticity) images.(3) Chose one of the R, G and B component images, and make the fruit area as ROI.(4) Calculate the R and G component histogram of the ROIs, and get the R component mean value and the G component mean value of the fruit.(5) Use x=R/(R+G+B) and y=G/(R+G+B) the get the x-y coordinate value (x, y).(6) Plot (x,y) on the x-y coordinate graph.3.How to locate the defect area on the image of atomato?Answer:1) Open the tomato image.2) Split the tomato image into R, G and B component images.3) Chose one of the R, G and B component images, using Sobel operator to get an edge image.4) Binarize one of the R, G and B component images to a binary image.5) To make the edge image and binary image using an operator, and then get the defect area of the tomato.4.What color expression methods is used in amachine vision system? Give 3 methods at least. Answer:1) Munsell Renotation.2) RGB chromaticity.3) XYZ color coordinate system.4) L*a*b*.5) HSI (Hue, Saturation, and Intensity).5.What shape expression methods is used in amachine vision system ? Give 3 methods at least. Answer:1) Complexity.2) Feret’s diameter ratio.3) Circularity factor.4) Occupancy.5) moment.6) deformation from gravity center.6.What is the advantage of the wide-span vehicles?Answer:1).Harmful influence on plants caused by soil compaction can be reduced because track units pass on a fixed path.2).An implement mounted on a frame beam can perform its task regardless of the ground condition.3).Several operations can be accomplished by a change in implements4).The wide working width enhances working efficiency and results.7.Why is the sunset color red and the sky blue in daytime?Answer:The Earth’s atmosphere contains both air molecules and tiny suspended particles (tinier than a wavelength of light), both of which scatter light (send it off in different directions). This scattering effect affects light of shorter wavelengths more than longer wavelengths. Longer wavelength light transmits from the sun to the earth, while the shorter wavelength light scatters. we see the bule color of the shorter wavelength light scattered in the sky.8.How can we judge an orange is good?Answer:1) color: reddish color is better2) shape: flatten3) size: mid is best4) texture: smooth surface is better9.Please calculate the DOF (degrees of freedom) ofour arms.Answer:A human arm have 7 DOF’s. The shoulder has 3 DOF’s, the elbow has 1-2 DOF’s, and the wrist has 2-3 DOF’s (wrist roll is sometimes included as one of the degrees of the elbow).10.Describe what you learned on reflectance of plantparts in several sentences.Answer:1). The figure shows thy typical spectral reflectance ofparts of plants in the near-ultraviolet, visible, andnear- infrared regions. The plants need the photosynthetic active radiation (400-700nm wave band, mostly red and blue light) portion of light for photosynthesis, so the leaves reflect green-colored light. This is reason that the leaves are green.2). The flowers' reflectance between 500nm and700nm is high, so the flower is yellow. Similarly, the fruit 1 is purple and green, the fruit 2 is red. We can ensure the color of parts of plants based on their reflectance.3). In the near-infrared region, there are many absorption bands due to water at 970, 1170, 1450 and 1950nm, and all parts of the plant have higher reflectance here than in the visible region. The absorption bands at 970 and 1170nm are not due to flower petals and leaves but to fruits and stems. These wavelengths can be used for discriminating them from the other parts of the plant in the near-infrared region.11.How could you get the distance D from the lens to eachfruit in the direction of the lens axis by two images atdifferent viewpoints using binocular stereo-vision system? Answer:By the triangular measurement principle, we can get it.12.Please describe the measuring method fordistance of position-sensitive device (PSD).Answer:The position-sensitive device (PSD) is used to measure distances. A light beam from the light projector is reflected at the surface of the object. The reflected light is focused by a lens on the sensitive zone of the PSD as a small image. The PSD has two anodes, A and B; the ratio of these anode currents changes according to the position of the image. The distance to the object is calculated with these two currents by triangulation.13.How many types of lamps are there?Answer:Halogen, Incandescent, Fluorescent, LED, HID.14.Why are leaves green?Answer:The leaves absorb the red and blue color, reflect the green color, so we will see the leaves are green.15.How many types of actuators are there?Answer:1)Electric actuator: DC Motor, AC motor, Stepping motor, Servo motor, Solenoid, etc.2) Hydraulic actuator: Hydraulic cylinder, hydraulic motor3) Pneumatic actuator: Air cylinder, Air motor4) SMA actuator16.What are the required components for thebioproduction robot? And describe their functions.Answer:The required components for the bioproduction robot are manipulators, end-effector, vision sensors, traveling device, control device, and actuator. Their functions are:①. Manipulators: to carry out the special task of the machine.②. End-effector: to play a role similar to that of a human hand at the end of the manipulator.③. Sensors: includes internal sensors and external sensors, to know the environmental conditions around robots④. Traveling device: to make the operation space of the manipulator larger.⑤. Control device: to control the robotic components⑥. Actuator: to provide power for the robot.17.what is color temperature?Answer:Color and temperature don't seem to have a direct relationship with each other, but light sources are often defined in terms of their color temperature. In addition, the measurement of color temperature is in Kelvin degrees.For example, the color of the light emitted by a flash is rated at 5500 degrees; it is designed to imitate noon daylight. If the flash produces light that is 6000 degrees Kelvin, it has a slight bluish tinge. If it is rated at 4800 degrees, it is slightly warmer, or more yellowish, than white light.Digital technology uses these same traditional concepts but with a new twist. You can simply adjust your white point to change the color balance. For example, if you lower the white point to, say, 3200, you are telling the camera that you want yellowish light to be shown as white noon-type daylight. This means that daylight and flash (5500K) will be bluish, and overcast conditions and shade (about 7500K) will be exceptionally blue.18.How to find out a rotten or injury fruit that could notbe seen directly by human eyes?Answer:Using a UV light, the rotten or injury part of fruit will emit fluorescence.。