Abaqus Explicit 接触问题
abaqus接触非线性与接触分析

自接触
单个表面与它自身接触称为自接 触。在ABAQUS的二维和三维模 型中可用。
在分析过中,当表面严重变形时, 使用自接触将非常方便。对于某 些问题,在分析之前不可能确定 单个的接触区域,或者确定接触 区域是非常困难的。
把单个接触表面作为接触对定义 自接触,而不是通过两个不同的 表面定义。
SURF1 (刚体) SURF2
体(一般刚体功能)。 写用户子程序(RSURFU)定义表面 (只有ABAQUS/Standard可用)。
主/从方法和隐含假设
• 因为接触表面下面的 实体被离散化,接触 表面也必须被离散化。
接触表面分为:
主面
从面
• ABAQUS/Standard中使 用的严格的主/从接触算法。
• 从属表面的节点不能 穿透到主控表面。
最小主应力云图
例子:橡胶垫片的压缩 (选自 “Self-contact in rubber/foam components: rubber gasket,” ABAQUS例子手册1.1.17 节)
变形体与刚体的接触:
表面之间的有限滑动(大位移)。 变形组件之间的有限应变。
典型例子: 成型模拟 (刚体砧/模具、可变形组件。)
ASURF, BSURF
*SURFACE INTERACTION,
NAME=FRIC1
1.0,
接触面在垂直平面方向的厚度
*FRICTION 0.4,
*SURFACE INTERACTION的子选项,列出表面的基本属性
定义接触对
定义表面和接触属性之后,就可以 定义“接触对”。
在分析过程中,接触对指定了两个 相互接触的表面。
abaqus接触非线性和接触分析
概述
ABAQUS中Standard分析模块和Explicit分析模块的区别比较及选择

1、ABAQUS各模块介绍ABAQUS有两个主要的分析模块:ABAQUS/Standard和ABAQUS/Explicit。
其中ABAQUS/Standard还有两个特殊用途的附加分析模块:ABAQUS/Aqua和ABAQUS/Design。
另外,还有ABAQUS分别与ADAMS/Flex,C-MOLD和Mold flow的接口模块:ABAQUS/ADAMS,ABAQUS/C-MOLD和ABAQUS/ MOLDFLOW 。
ABAQUS/CAE是完全的ABAQUS工作环境模块,它包括了ABAQUS模型的构造,交互式提交作业、监控作业过程以及评价结果的能力。
ABAQUS/Viewer是ABAQUS/CAE的子集,它具有后处理功能。
ABAQUS/Standard是一个通用分析模块,它能够求解领域广泛的线性和非线性问题,包括静力、动力、热和电问题的响应等。
ABAQUS/Explicit是用于特殊目的分析模块,它采用显式动力有限元列式,适用于像冲击和爆炸这类短暂,瞬时的动态事件,对加工成形过程中改变接触条件的这类高度非线性问题也非常有效。
两个分析模块的ABAQUS/CAE界面是一样的,两个模块的输出也是类似的,不论哪个模块都可以采用可视化图形进行后处理。
ABAQUS/CAE(Complete ABAQUS Environment)是ABAQUS的交互式图形环境,用它可方便而快捷地构造模型,只需生成或输入要分析结构的几何形状,并把它分解为便十网格化的若干区域。
并对几何体赋十物理和材料特性、荷载以及边界条件。
ABAQUS/CAE具有对几何体划分网格的强大功能,并可检验所形成的分析模型。
一旦模型生成,ABAQUS/CAE可提交并监控要分析的作业,可视化模块就可用来显式结果。
2、ABAQUS/Standard和ABAQUS/Explicit的比较ABAQUS/Standard和ABAQUS/Explicit都具有解决广泛的各种类型问题的能力。
abaqus七讲:abaqus接触分析

• ABAQUS/Standard中使 用的严格的主/从接触算法。 • 从属表面的节点不能 穿透到主控表面。 • 主控表面的节点可以 穿透到从属表面。
在多数情况下,ABAQUS/Explicit使用平衡的主/从算法。
• 两次应用单纯的主-从接触算法,并平均化。在第二次施加接触 约束时,交换主/从表面。 • 使接触物体之间的侵彻达到最小化。
变形体之间的有限滑动接触 这是最一般类型的接触。
例子:螺纹连接。 • 这些问题一般包含初始的过盈配合
由于过盈精度引起的 接触压力的分布
自接触
单个表面与它自身接触称为自接 触。在ABAQUS的二维和三维模 型中可用。 在分析过中,当表面严重变形时, 使用自接触将非常方便。对于某 些问题,在分析之前不可能确定 单个的接触区域,或者确定接触 区域是非常困难的。 把单个接触表面作为接触对定义 自接触,而不是通过两个不同的 表面定义。
SURF1 (刚体) SURF2
最小主应力云图
例子:橡胶垫片的压缩 (选自 “Self-contact ts: rubber gasket,” ABAQUS例子手册1.1.17 节)
变形体与刚体的接触:
表面之间的有限滑动(大位移)。 变形组件之间的有限应变。
讲接触非线性
概述
• 简介 • 主/从方法和隐含假设 • 定义双面接触概述 • 定义面的规则 • 局部表面行为 • 接触问题中点的相对滑动 • 接触问题中调整初始节点位置
• 接触输出
• 完全约束的接触行为 • 刚体
简介
• 什么是接触?
当两个实体接触时,力通过它们的接触表面传递。 • 在某些情况下,只传递垂直接触表面的力。
定义表面接触属性
*SURFACE INTERACTION选项定义表面接触属性。
ABAQUSEXPLICIT

ABAQUSEXPLICIT 分析中接触厚度减薄(thickness reduction)解决办法壳单元厚度&接触厚度1)壳单元厚度由其截⾯属性确定;2)在Abaqus/Explicit中应⽤General Contact,由壳单元组成的Surface,其接触厚度并不⼀定等于单元厚度。
a)Abaqus/Explicit中的General Contact算法要求接触厚度与单元边长或对⾓线长度的⽐值⼩于⼀定⽐例,该⽐例系数在20%~60%之间,具体取值由单元⼏何形状决定;b)因此,当壳单元尺⼨较⼤时,接触厚度等于单元厚度;当壳单元尺⼨较⼩时,接触厚度将⾃动减⼩;c)若接触厚度⾃动减⼩,可在计算中⽣产的sta⽂件开头部分看到如下Warning,其中包含有接触厚度减⼩⽐例。
3)接触厚度可采⽤*SURFACE PROPERTY ASSIGNMENT, PROPERTY=THICKNESS进⾏设置。
但是,Abaqus/Explicit仍将对General Contact中的接触厚度进⾏检测,若单元尺⼨过⼩,接触厚度仍将被⾃动减⼩。
************************解决办法禁⽌ Abaqus/Explicit 对General Contact 中的接触⾯进⾏接触厚度检查。
若要取消对Surf1 进⾏接触厚度检查,具体⽅法如下:1)在General Contact中取消Surf1的Self Contact,如下图所⽰:2)在Keywords的Model或Step定义中加⼊:*CONTACT CONTROLS ASSIGNMENT,CONTACT THICKNESS REDUCTION=SELF 边缘的接触厚度仍将⾃动检查/减⼩或*CONTACT CONTROLS ASSIGNMENT,CONTACT THICKNESS REDUCTION=NOPERIMSELF 禁⽤边缘的接触厚度检查(⽂章来⾃SIMWE)。
ABAQUS应用培训-09 接触分析及实例

接触分析方刚2015年7月2015/7/5 1接触•“为什么要定义机械接触?–只有在接触模块中指定接触时,ABAQUS才识别装配件中不同区域之间的接触。
–两个表面物理上的接近不足以建立表面之间的接触关系。
–接触与装配件模块中的接触位置约束是不相关的。
–接触位置约束只是让部件实例正确定位的方法之一。
–可以定义接触模型的法向关系、摩擦和干涉。
接触的实质[K]{U } {P }0 0 0 0 0 00 0 0 0 0 00 0 0 0 0k3100 0 0 0 0 00 0 0 0 0 00 0 0 0 k 06110 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 k 0 0 0106k0 0 0 0 01160 0 0 0 0 0145 236 7101189123接触操作(Interaction)Interaction1. 不同的接触算法:standard explicit2. 作为一种边界条件,接触定义在不同的step中可以发生变化3. 接触算法还分为Kinematic, Penalty,初学者不用选择4. Surface to Surface, Surface to node5. 主面(master, first)和从面(slace,second)6. 接触体之间的相互作用:摩擦和热传递等设置7. 接触面的间隙调整4 2015/7/5接触–利用接触模块定义并管理以下信息:–模型区域之间或模型区域同它周围模型之间的机械和热接触。
机械接触其它接触(约束)热接触一般和双面接触捆绑约束热膜条件自接触刚体对环境的辐射弹性基础显示体热接触激励器/传感器耦合壳到实体耦合嵌入区域线性多点约束方程接触–例如:壳到实体的耦合–将壳边同实体表面耦合的界面。
接触–在接触模块中还可以定义连接器。
–允许在装配件内的两个点之间或装配件中的点和地面之间定义连接。
–连接器经常同显示体一起使用接触带有摩擦的双面接触带有摩擦的自接触捆绑约束筒子挤压分析过程中的接触定义:未变形状态(左)和变形状态(右)8接触•例子:定义接触的分析步1. 创建接触,并选择接触起作用的分析步。
lecture9 AbaqusExplicit中的接触问题 精选文档
.
.
*CONTACT PAIR
ASURF, BSURF*END STEP*ST NhomakorabeaP.
.
*CONTACT PAIR, OP=DELETE 删除包含表面ASURF和BSURF的接
ASURF, BSURF
触对。
*CONTACT PAIR, OP=ADD
BSURF, CSURF *END STEP
添加包含表面BSURF和CSURF的接 触对。
Introduction to Abaqus/Standard and Abaqus/Explicit
? Dassault Systè mes, 2008
实施接触约束
? Dassault Systè mes, 2019
实施接触约束
? 可以用下面的算法之一实施接触约束: ? 运动依从(只有接触对算法可用) ? 罚函数
Introduction to Abaqus/Standard and Abaqus/Explicit
? Dassault Systè mes, 2008
将接触对作为部分的历程数据
?*CONTACT PAIR 选项可以包含OP参数,OP参数可以的值为ADD或DELETE。 ?例子:
*STEP
*DYNAMIC, EXPLICIT
, , prop_1 alum_surf, steel_surf, prop_2 alum_surf, alum_surf, prop_3
(以全局的方式重新制定属性) (局部修改) (局部修改)
Introduction to Abaqus/Standard and Abaqus/Explicit
? Dassault Systè mes, 2008
abaqus接触问题分析

abaqus接触问题分析abaqus接触分析1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding,adjust=0.2.4、定义tie时也应该设定类似的position tolerance:*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.15、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
abaqus系列教程-13-Explicit准静态分析
13 ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit 在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型成为很大时,显式过程比隐式过程需要较少的系统资源。
关于隐式与显式过程的详细比较请参见第2.4节“隐式和显式过程的比较”。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
目标是在保持惯性力的影响不显著的前提下用最短的时间进行模拟。
准静态(Quasi-static)分析也可以在ABAQUS/Standard中进行。
当惯性力可以忽略时,在ABAQUS/Standard中的准静态应力分析用来模拟含时间相关材料响应(蠕变、膨胀、粘弹性和双层粘塑性)的线性或非线性问题。
关于在ABAQUS/Standard中准静态分析的更多信息,请参阅ABAQUS分析用户手册(ABAQUS Analysis User’s Manual)的第6.2.5节“Quasi-static analysis”。
13.1 显式动态问题类比为了使你能够更直观地理解在缓慢、准静态加载情况和快速加载情况之间的区别,我们应用图13-1来类比说明。
Abaqus-Explicit-接触问题
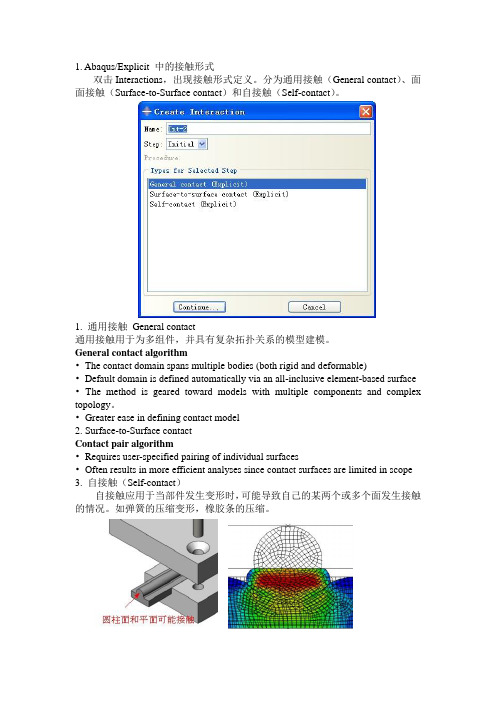
1. Abaqus/Explicit 中的接触形式双击Interactions,出现接触形式定义。
分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。
1. 通用接触General contact通用接触用于为多组件,并具有复杂拓扑关系的模型建模。
General contact algorithm•The contact domain spans multiple bodies (both rigid and deformable)•Default domain is defined automatically via an all-inclusive element-based surface •The method is geared toward models with multiple components and complex topology。
•Greater ease in defining contact model2. Surface-to-Surface contactContact pair algorithm•Requires user-specified pairing of individual surfaces•Often results in more efficient analyses since contact surfaces are limited in scope 3. 自接触(Self-contact)自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。
如弹簧的压缩变形,橡胶条的压缩。
•容易使用•“自动接触”•节省生成模型的时间•通用接触算法一般比双面接触算法快机械约束形式•运动依从Kinematic contact method(只有接触对形式可用,General contact不可用)默认的运动接触公式达到的计算精度与接触条件相一致。
Abaqus显式非线性动态分析

2012-11-14 11:43 by:Abaqus教程来源:广州有道有限元Abaqus显式非线性动态分析——ABAQUS/Explicit适用的问题类型显式动态程序对于求解广泛的、各种各样的非线性固体和结构力学问题是一种非常有效的工具。
它常常对隐式求解器是一个补充,如ABAQUS/Standard;从用户的观点来看,显式与隐式方法的区别在于:•显式方法需要很小的时间增量步,它仅依赖于模型的最高固有频率,而与载荷的类型和持续的时间无关。
通常的模拟需要取10,000至1,000,000个增量步,每个增量步的计算成本相对较低。
•隐式方法对时间增量步的大小没有内在的限制;增量的大小通常取决于精度和收敛情况。
典型的隐式模拟所采用的增量步数目要比显式模拟小几个数量级。
然而,由于在每个增量步中必须求解一套全域的方程组,所以对于每一增量步的成本,隐式方法远高于显式方法。
了解两个程序的这些特性,能够帮助你确定哪一种方法是更适合于你的问题。
ABAQUS/Explicit适用的问题类型在讨论显式动态程序如何工作之前,有必要了解ABAQUS/Explicit适合于求解哪些类问题。
贯穿这本手册,我们已经提供了贴切的例题,它们一般是应用ABAQUS/Explicit求解的如下类型问题:高速动力学(high-speed dynamic)事件最初发展显式动力学方法是为了分析那些用隐式方法(如ABAQUS/Standard)分析起来可能极端费时的高速动力学事件。
作为此类模拟的例子,在第10章“材料”中分析了一块钢板在短时爆炸载荷下的响应。
因为迅速施加的巨大载荷,结构的响应变化的非常快。
对于捕获动力响应,精确地跟踪板内的应力波是非常重要的。
由于应力波与系统的最高阶频率相关联,因此为了得到精确解答需要许多小的时间增量。
复杂的接触(contact)问题应用显式动力学方法建立接触条件的公式要比应用隐式方法容易得多。
结论是ABAQUS/Explicit能够比较容易地分析包括许多独立物体相互作用的复杂接触问题。
Abaqus中的分析步、接触和载荷

Abaqus中的分析步、接触和载荷Abaqus/CAE中的分析步、接触和载荷第五讲L1.2概述分析步 ? 输出 ? 接触 ? 载荷、边界条件和初始条件 ? 练习Introduction to Abaqus/CAE分析步L1.4分析步分析步模块有下面四个用途: 1. 定义分析步。
2. 指定输出需求。
3. 指定分析诊断。
4. 指定分析控制。
Introduction to Abaqus/CAE分析步分析步 ? 分析步为描述模拟历程提供了一种方便的途径。
分析的结果取决于事件的顺序。
比如,右图中的弓和箭。
整个分析过程包括四个分析步:L1.5Step 3 = Natural frequency extractionStep 1: 预拉伸弓弦 (静态响应)。
Step 2: 拉弓 (静态响应)。
Step 3: 为加载的系统提取自然频率。
Step 4: 放开弓弦 (动态响应)。
Introduction to Abaqus/CAE分析步在Abaqus/CAE中定义分析步General proceduresL1.6Linear proceduresAbaqus/Explicit proceduresIntroduction to Abaqus/CAEL1.7分析步分析步替换任何分析步都可以用其它分析步替换? 必需满足分析步的先后顺序。
? Abaqus/CAE将保留载荷、边界条件、接触等属性Introduction to Abaqus/CAEL1.8分析步分析步抑制任何分析步都可以抑制 ? 可以灵活的分析模型 (比如可以评估不同模型设置) ? 在此分析步创建的属性不参与分析Introduction to Abaqus/CAE输出输出输出到结果文件? Abaqus/Viewer将使用输出数据库。
? 对于Python和C++保留了API接口,可以用于外部的后处理(比如,在Abaqus/Viewer中添加显示数据) ? 两种类型的输出数据:场和历程数据。
abaqus点面接触注意事项

abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:abaqus点面接触是ABAQUS软件中一个非常常见的接触类型,它主要用于描述两个物体之间的接触行为。
在ABAQUS软件中,点面接触可以用于描述实体与表面之间的接触、实体与实体之间的接触等多种情况。
在进行ABAQUS点面接触建模时,一些注意事项是非常重要的,下面将介绍一些常见的注意事项:1. 接触定义:在进行ABAQUS点面接触建模时,首先需要定义接触属性,包括接触法向刚度、切向刚度、摩擦系数等参数。
这些参数的选择会直接影响到模拟结果的准确性,需要根据具体的实际情况进行合理选择。
3. 接触间隙:在进行ABAQUS点面接触建模时,需要考虑接触间隙的影响。
接触间隙会影响到接触行为的描述,需要根据实际情况调整接触间隙的大小。
6. 应力分布:在进行ABAQUS点面接触建模时,需要考虑应力分布的影响。
接触行为会导致应力的集中,需要根据实际情况进行应力分布的分析,确保模拟结果的准确性。
进行ABAQUS点面接触建模时,需要注意接触定义、接触对、接触间隙、摩擦力、网格精度、应力分布和收敛性等问题。
只有综合考虑这些因素,才能得到准确可靠的模拟结果。
希望以上内容对您有所帮助!第二篇示例:Abaqus是一款非常流行的有限元分析软件,它的强大功能可以帮助工程师进行各种复杂的结构分析。
在Abaqus中,点面接触是一个常见的分析场景,但同时也是一个容易出现问题的地方。
在点面接触的建模和仿真过程中,需要注意一些事项,以确保分析结果的准确性和可靠性。
本文将介绍一些关于Abaqus点面接触的注意事项。
一、选择合适的接触类型在Abaqus中,有多种不同类型的接触可以选择,如面对面接触、点对面接触、基于等效半径的接触等。
在选择接触类型时,需要根据具体的分析要求和结构特点进行权衡,确保选取合适的接触类型。
如果需要考虑接触面之间的相对运动,则应选择点对面接触;如果接触面积较大且无需考虑细节,可选用面对面接触等。
06 Abaqus-Standard中的接触问题
Lecture 6
© Dassault Systè mes, 2008
L6.2
简介
• 将接触作为模型定义的一部分 • 主/从方法中网格密度的考虑 • Abaqus/Standard中的接触逻辑 • 习题5:密封接触
Introduction to Abaqus/Standard and Abaqus/Explicit
TIME AVG. FORCE AT NODE AT NODE AT NODE 333 329 337
3.147E+03 DOF DOF DOF 2 2 2
平衡的收敛性检查
EQUILIBRIUM NOT ACHIEVED WITHIN TOLERANCE.
不仅是接触的不相容太大,而且是力 的平衡也没有达到
Correct
Master surface placed on coarse mesh Minimal penetration into slave surface.
Introduction to Abaqus/Standard and Abaqus/Explicit
© Dassault Systèmes, 2008
L6.14
在 Abaqus/Standard中CONTACT规则
• Message文件, Step 3, Increment 6 (cont'd):
CONVERGENCE CHECKS FOR SEVERE DISCONTINUITY ITERATION 1
MAX. PENETRATION ERROR -8.16193E-009 AT NODE 331 OF CONTACT PAIR (ESURF,FSURF) MAX. CONTACT FORCE ERROR -4369.44 AT NODE 363 OF CONTACT PAIR (CSURF,DSURF) THE ESTIMATED CONTACT FORCE ERROR IS LARGER THAN THE TIME-AVERAGED FORCE.
(完整)abaqus系列教程-13ABAQUSExplicit准静态分析

13 ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型成为很大时,显式过程比隐式过程需要较少的系统资源。
关于隐式与显式过程的详细比较请参见第2.4节“隐式和显式过程的比较”。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
目标是在保持惯性力的影响不显著的前提下用最短的时间进行模拟。
准静态(Quasi-static)分析也可以在ABAQUS/Standard中进行。
当惯性力可以忽略时,在ABAQUS/Standard中的准静态应力分析用来模拟含时间相关材料响应(蠕变、膨胀、粘弹性和双层粘塑性)的线性或非线性问题。
关于在ABAQUS/Standard中准静态分析的更多信息,请参阅ABAQUS分析用户手册(ABAQUS Analysis User’s Manual)的第6.2.5节“Quasi-static analysis”。
13.1 显式动态问题类比为了使你能够更直观地理解在缓慢、准静态加载情况和快速加载情况之间的区别,我们应用图13-1来类比说明。
abaqus接触分析的常见问题【范本模板】

CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产品设计和力学等众多领域。
世界上几大CAE公司各自以其独到的技术占领着相应的市场。
ABAQUS有限元分析软件拥有世界上最大的非线性力学用户群,是国际上公认的最先进的大型通用非线性有限元分析软件之一。
它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域。
ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算.《ABAQUS有限元分析常见问题解答》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种常见问题,并以实例的形式教给读者如何分析问题、查找错误原因和尝试解决办法,帮助读者提高解决问题的能力。
《ABAQUS有限元分析常见问题解答》一书由机械工业出版社出版。
16。
1.1点对面离散与面对面离散【常见问题16-1】在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法(node-to-sur face-dis—cre-tization)和面对面离散方法(surface-to-surfacediscretization),二者有何差别?『解答』在点对面离散方法中,从面(slavesurface)上的每个节点与该节点在主面(mastersu rface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点。
使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。
面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化.可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。
在如图16-l和图16-2所示的实例中,比较了两种情况。
1)从面网格比主面网格细:点对面离散(图16—1a)和面对面离散(图16-2a)的分析结果都很好,没有发生穿透,从面和主面都发生了正常的变形。
ABAQUS接触问题浅析_宫龙颖
煤炭科技#机电与信息化ABAQUS接触问题浅析宫龙颖(煤炭科学研究总院检测研究分院,北京市朝阳区,100013)摘要分别讨论了在ABAQU S两种求解器下解决接触问题的方法,并就其中容易引起分析结果不正确或者不收敛之处予以重点阐述,力图最大限度减少在分析此类问题时出现的错误,并加深对它的理解。
关键词接触非线性有限元ABAQU S中图分类号T D40文献标识码BOn the use of ABAQUS for analyzing the problem of contactsGong Lo ng ying(T est Br anch of China Co al R esear ch Institute,Q ing niang ou Dong lu5,Beijing100013,China)Abstract Discussing t he methods to solve the problem o f contact s under2different solvers o f ABA QU S,this pa per fo cuses on t he points w her e w r ong r esult s o r abort ive analy sis ma y cro p out.T his paper also aims at minim-i zing the po ssibility of mistakes during the course of analyzing and acquir ing a deepened co mpr ehension abo ut the use of finit e element as a to ol for analysis and the problem o f contacts pr oper.Key words contact,no n-linear,finite element,A BAQ U S1概述在工程技术中,接触问题的应用十分普遍。
ABAQUS显隐式、非线性及接触

1. 关于隐式和显式隐式算法和显式算法是两个比较范的概念,无论是静力学问题,还是动力学问题,都可以应用这两种方法。
隐式方法包括Newton-Raphson method,Tangetial stiffness method,radial return method等等;显式算法包括central difference method等。
隐式算法能提供更有力的整体逼近,达到收敛需反复的迭代,因而代价比价大;显式方法不需要迭代,因而代价较小。
隐式算法适于结构的瞬态响应等问题;显式算法适于冲击、爆炸等问题。
隐式算法稳定性是无条件的,以K求逆为代价换得了比显式算法可以采用大得多的时间步长;显式算法是条件稳定,其积分的结果依赖时间步的大小,步长变大往往会造成结果不收敛,所以要注意时间步的大小,还要保证计算结果与真实结论的偏差要小。
对于ABAQUS而言,用户经常要开发用户子程序(UMAT),当材料响应进入非线性,应力更新算法既可采用隐式和也可采用显式。
隐式积分方法需要Jacobian(包括切线刚度矩阵与载荷刚度矩阵),因为Jacobian并不影响结果的准确性,却影响收敛的速度,由于这个原因,近似的Jacobian经常被采用,进一步原因是因为塑性模型本身的复杂性,材料的Jacobian 不能导出解析解,因此数值近似的方法往往被采用。
2. 不论对于线性问题还是非线性问题,显式方法都需要一个小的时间增步量,它只依赖于模型的最高阶自振频率,而与载荷类型和加载时间无关。
3. 振型叠加技术可以确定线性系统的动态响应,可以计算瞬时载荷下的瞬时响应、谐波载荷下的稳态响应、基础运动的峰值响应以及随机载荷的响应,效率很高。
但模态技术不适于非线性分析,这类分析中必须采用直接时间积分法或显式分析。
4. 采用模态技术时,为获得结构动态行为的准确描述,必须提取足够多的振型。
在发生运动的方向上总的模型有效质量必须占据总的可运动质量的90%以上才能产生准确结果。
ABAQUS接触问题分析

ctrlectrle /zn1125 2012-03-26 10:56:261、 塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、 接触对中的slave surface应该是材料较软,网格较细的面。
3、 接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2.4、 定义tie时也应该设定类似的position tolerance:*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.15、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、 接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、 我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
abaqus接触指定切应力大小

abaqus接触指定切应力大小在ABAQUS/CAE中进行接触分析主要包括以下建模步骤:1、在Interaction功能模块、Assembly功能模块或Load功能模块中定义各个接触面;2、在Interaction功能模块中定义接触属性:法向接触属性和切向摩擦属性;3、在Interaction功能模块定义接触:主面、从面、滑动公式、从面位置调整、接触属性、接触面距离和接触控制等;4、在Load功能模块定义边界条件,保证消除模型的刚体位移。
在ABAQUS/Standard中通过定义接触面或接触单元来模拟接触问题,接触面分为以下三类:1)由单元构成的柔体接触面或刚体接触面2)由节点构成的接触面3)解析刚体接触面相互接触的两个面称为“接触对”,在一个接触对中最多只能有一个由节点构成的接触面。
只有一个接触面的接触对称为“自接触”(self-contact)。
在ABAQUS/Explicit中模拟接触问题的方法有:1)通用接触算法;2)接触对算法接触对由主面(master surface)和从面(slave surface)构成,在模拟过程中,接触方向总是主面的法线方向,从面的节点不会穿越主面,但是主面上的节点可以穿越从面。
注意事项:1)选择刚度较大的面作为主面。
解析面或由刚性单元构成的面必须作为主面,从面必须是柔体上的面。
2)如果两个接触面的刚度相似,选择网格较粗的面作为主面3)两个面的节点位置并不要求一一对应4)主面不能是由节点构成面并且必须是连续的5)如果接触面在发生接触的位置出现较大的尖角或凹角应将其分为两个面6)如果是有限滑移则在分析过程中尽量不要使从面节点落到主面以外7)一对接触对的法线方向应该相反有限滑移:两个接触面之间可以有任意的相对滑动小滑移:两个接触面之间只有很小的相对滑动,滑动量的大小只是单元尺寸的一小部分小滑移的计算代价小于有限滑移小滑移可以用于几何非线性问题,并考虑主面的大转动或大变形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. Abaqus/Explicit 中的接触形式双击Interactions,出现接触形式定义。
分为通用接触(General contact)、面面接触(Surface-to-Surface contact)和自接触(Self-contact)。
1. 通用接触General contact通用接触用于为多组件,并具有复杂拓扑关系的模型建模。
General contact algorithm•The contact domain spans multiple bodies (both rigid and deformable)•Default domain is defined automatically via an all-inclusive element-based surface •The method is geared toward models with multiple components and complex topology。
•Greater ease in defining contact model2. Surface-to-Surface contactContact pair algorithm•Requires user-specified pairing of individual surfaces•Often results in more efficient analyses since contact surfaces are limited in scope 3. 自接触(Self-contact)自接触应用于当部件发生变形时,可能导致自己的某两个或多个面发生接触的情况。
如弹簧的压缩变形,橡胶条的压缩。
•容易使用•“自动接触”•节省生成模型的时间•通用接触算法一般比双面接触算法快机械约束形式•运动依从Kinematic contact method(只有接触对形式可用,General contact不可用)默认的运动接触公式达到的计算精度与接触条件相一致。
在多数情况下,它工作得很好。
但是在某些情况下,如抖动接触,使用罚函数接触会更容易得到收敛的解。
不能为刚体-刚体接触建模。
•罚函数(通用接触和接触对均可使用)Penalty contact method 罚函数接触算法中接触约束的严格性低于运动学算法。
罚函数算法可以处理更一般类型的接触;比如,刚体之间的接触。
因为罚函数算法在模型中引入附加刚度,该附加刚度将影响稳定时间增量。
Abaqus/Explicit自动计算由与接触力相关的侵彻距离引入的“弹簧”刚度或“罚”刚度。
但是必须考虑相关的影响:应该尽量减少对稳定时间增量的影响。
在所有的分析中,允许的侵彻不可以太大。
•对于接触对算法:通过在*CONTACT CONTROLS选项指定SCALE PENALTY参数,用户可以缩放默认的罚刚度。
•对于通用接触算法:可以使用*CONTACT CONTROLS ASSIGNMENT, TYPE=SCALE PENALTY 选项缩放罚刚度。
综上,多数情况下,运动依从算法和罚函数算法将得到几乎一致的结果。
然而,在某些情况下,一种方法可能比另一种方法更可取。
如果需要知道kinematic algorithms和 penalty algorithms之间的区别,那就需要啃理论教材了(当然看abaqus 帮助文件也可以).简略的说:1)penalty algorithms(罚函数法)在被abaqus检测到接触距离以内的节点之间定义罚刚度,进而来迭代出接触力。
在每一个时间步先检查各从节点是否穿透主面。
如没有穿透则进入下一个时间步;如果穿透,则在该从节点与被穿透主面间定义罚刚度,引入一个较大的界面接触力,其大小与穿透深度、主面的刚度成正比。
2)kinematic algorithms先在一定时间内检查所有未与主面(master surface)接触的从节点(slave node),看是否在此时间内穿透了主面。
如果存在穿透则缩小时间步,使那些穿透主面的从节点都不贯穿主面,而使其正好到达主面。
在计算下一时间步之前,对所有已经与主面接触的从节点都施加约束条件,以保持从节点与主面接触而不贯穿。
此外还应检查那些和主面接触的从节点所属单元是否受到拉应力作用。
如受到拉应力,则施加释放条件,使从节点脱离主面。
就abaqus接触计算的初级使用来说,如果接触对中有刚体,一般用penalty algorithms;如果接触对是弹性体,有限选Kinematic algorithms. 无刚体的接触,建议直接用Kinematic algorithms试算。
总结:1)接触面存在刚体,用penalty算法2)接触面之间的相对运动方向平行于接触面,用penalty算法3)弹性碰撞分析不可用hard-kinematic 算法。
碰撞之中塑性变形控制的接触分析4)penalty算法一般会减小稳定时间增量5)接触计算与以下情况耦合时推荐penalty算法:constraint equation, multi-point constraint, tie constraint, embedded element constraint, or kinematic constraint6)breakable bond model 模拟,必须用hard kinematic contact 。
碰撞应该用罚函数法吧,要是用运动学算法时需要划分较细的网格以避免能量的丢失。
kinematic contact要求更严格,不允许出现穿透,而penalty contact允许。
默认的Penalty stiffness为弹性刚度的10%,所以如果是解决塑性变形问题的话,二者算出来的结果相差不大。
penalty对切向的相对位移的接触比较有效。
3. 初始运动学依从关系Abaqus/Explicit不允许接触表面的初始过盈。
•接触表面的节点将被调整,删除分析之前的初始过盈:•只移动接触表面的节点。
•对于分析过程第一个分析步定义的接触对,由于调整表面引起的位移不产生初始应变或应力。
•在随后的分析步中:•对于接触对算法,调整将产生应变。
•对于通用接触算法,忽略初始过盈。
Contact Formulations接触程式,包括1. Contact discretization接触离散化Where is the constraint applied 接触约束应用在哪•Node-to-surface•Surface-to-surface2. Constraint enforcement 执行接触How is the constraint enforced 接触约束怎么执行•Default (Explicit)•Direct (Lagrange multipliers) Standard•Penalty method Standard•Augmented Lagrange (Lagrange multipliers combined with penalty method) Standard3. Contact tracking (relative sliding) 跟踪接触How does the constraint evolve 接触约束怎么发展•Finite sliding•Small slidingContact DiscretizationNode-to-surface technique: 节点和面接触•Default method for contact pairs。
接触对的默认接触定义方法。
•Not available for general contact。
不适用于General contact。
•Nodes on one surface (the slave surface) contact the segments on the other surface(the master surface). 从面上的节点接触主面的面。
•Contact is enforced at discrete points (slave nodes)。
在从面节点处执行接触。
从面需要划分较细的单元来提高精度和消除应力振动即消除应力噪声。
Use of a “matched mesh” across the contact interface will eliminate this solution noise。
Surface-to-surface technique:面面接触•Only method for general contact,Alternative method for contact pairs•The method considers the shape of both the master and slave surfaces.•Contact is enforced in an average sense over the slave surface.当面面接触用于接触对时,contact pairs和general contact 区别不大,主要的区别在于使用方便性和性能表现erformance。
可以看出Node-to-Surface参与接触节点个数较少。
而S-to-S较多。
对于面面接触,个别点小的穿透可能会出现,但是不会发生漏检测到的主面穿透Contact EnforcementHard contact:In Abaqus/Standard, the default contact behavior is “hard” contact.The behavior is described by a contact property known as the pressure-penetration curve (alternative behavior can be specified; discussed later).The desired behavior (no penetration) is achieved using an enforcement method.理想的没有穿透的接触行为可以用三种强化方法来获得。
Three numerical methods are available in Abaqus/Standard to achieve or approximate “hard” contact conditions:Direct enforcement method:Strict enforcement of pressure-penetration relationship using the Lagrange multiplier method. 严格压力-穿透关系,用拉格朗日乘法算法。