变频空调驱动电机的弱磁控制
永磁同步电机弱磁控制原理

永磁同步电机弱磁控制原理永磁同步电机是一种高效、高性能的电机,具有高转矩密度、高效率、高精度等优点,因此在工业生产中得到了广泛应用。
然而,永磁同步电机在运行过程中,由于磁场的不稳定性,容易出现磁场失稳、转速波动等问题,影响了电机的性能和稳定性。
为了解决这些问题,人们提出了弱磁控制原理,通过控制电机的磁场,使其保持稳定,从而提高电机的性能和稳定性。
弱磁控制原理是指在永磁同步电机运行过程中,通过控制电机的磁场,使其保持在一定的范围内,从而保证电机的性能和稳定性。
具体来说,弱磁控制原理包括两个方面:一是控制电机的磁场强度,二是控制电机的转速。
控制电机的磁场强度是弱磁控制原理的核心。
在永磁同步电机中,磁场的强度直接影响电机的性能和稳定性。
如果磁场过强或过弱,都会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的磁场强度在一定的范围内,既不能过强,也不能过弱。
具体来说,可以通过控制电机的电流来控制磁场的强度。
当电机的电流过大时,磁场会过强,导致电机失稳;当电流过小时,磁场会过弱,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流在一定的范围内,从而控制磁场的强度。
控制电机的转速也是弱磁控制原理的重要方面。
在永磁同步电机中,转速的稳定性直接影响电机的性能和稳定性。
如果转速波动过大,会导致电机的性能下降或者失稳。
因此,弱磁控制原理要求控制电机的转速在一定的范围内,既不能过快,也不能过慢。
具体来说,可以通过控制电机的电流和电压来控制转速的稳定性。
当电机的电流和电压过大时,转速会过快,导致电机失稳;当电流和电压过小时,转速会过慢,导致电机性能下降。
因此,弱磁控制原理要求控制电机的电流和电压在一定的范围内,从而控制转速的稳定性。
弱磁控制原理是一种有效的控制永磁同步电机的方法,可以提高电机的性能和稳定性。
在实际应用中,可以通过控制电机的电流和电压来控制磁场的强度和转速的稳定性,从而实现弱磁控制。
同时,还可以采用先进的控制算法和控制器,提高电机的控制精度和稳定性,进一步提高电机的性能和稳定性。
弱磁控制
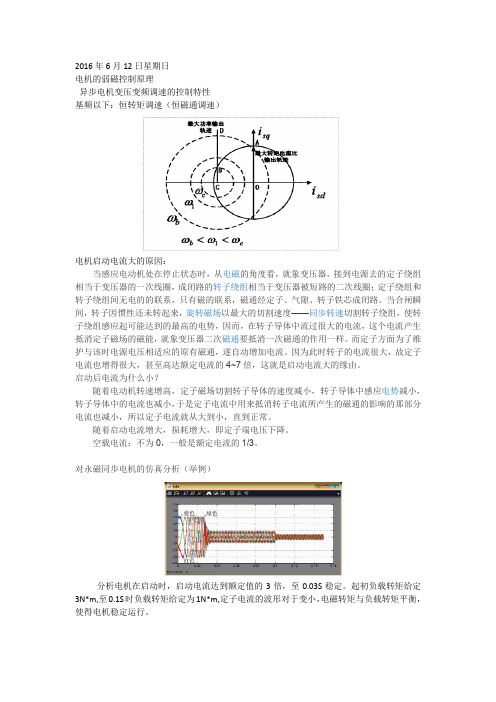
2016年6月12日星期日电机的弱磁控制原理异步电机变压变频调速的控制特性基频以下:恒转矩调速(恒磁通调速)电机启动电流大的原因:当感应电动机处在停止状态时,从电磁的角度看,就象变压器,接到电源去的定子绕组相当于变压器的一次线圈,成闭路的转子绕组相当于变压器被短路的二次线圈;定子绕组和转子绕组间无电的的联系,只有磁的联系,磁通经定子、气隙、转子铁芯成闭路。
当合闸瞬间,转子因惯性还未转起来,旋转磁场以最大的切割速度——同步转速切割转子绕组,使转子绕组感应起可能达到的最高的电势,因而,在转子导体中流过很大的电流,这个电流产生抵消定子磁场的磁能,就象变压器二次磁通要抵消一次磁通的作用一样。
而定子方面为了维护与该时电源电压相适应的原有磁通,遂自动增加电流。
因为此时转子的电流很大,故定子电流也增得很大,甚至高达额定电流的4~7倍,这就是启动电流大的缘由。
启动后电流为什么小?随着电动机转速增高,定子磁场切割转子导体的速度减小,转子导体中感应电势减小,转子导体中的电流也减小,于是定子电流中用来抵消转子电流所产生的磁通的影响的那部分电流也减小,所以定子电流就从大到小,直到正常。
随着启动电流增大,损耗增大,即定子端电压下降。
空载电流:不为0,一般是额定电流的1/3。
对永磁同步电机的仿真分析(举例)分析电机在启动时,启动电流达到额定值的3倍,至0.03S稳定。
起初负载转矩给定3N*m,至0.1S时负载转矩给定为1N*m,定子电流的波形对于变小,电磁转矩与负载转矩平衡,使得电机稳定运行。
转速刚启动瞬间为0,但大约经过0.02S后电机转速达到给定值,当0.1S时负载突然减小,转速有短暂的上升,立刻回到给定值,转速比较稳定,达到理想。
电机启动时,电磁转矩启动时较大,至0.03S后电磁转矩达到3N*m,0.1S时负载转矩发生变化,即电磁转矩也相应的发生变化。
电机空载运行时,空载电流的幅值大约是额定值的1/3,绝对不为0,平均值为0,相应的三相静止定子电流为120度,两相静止坐标互差90度,空载情况下,0.2S之前空载,其输出的两相静止坐标近似为0 ,但肯定不是0,由于采用id=0控制,即直轴电流一直是0,而转矩电流iq在控制是电流几乎为0,加负载后,值增加。
永磁同步电机的弱磁控制

永磁同步电机的弱磁控制
永磁同步电机被广泛应用于许多工业领域,如汽车工业、航天航空、机器人、风力发
电和家用电器等。
在永磁同步电机的控制方案中,弱磁控制是一种有效的控制方法,可以
提高永磁同步电机的效率、降低成本和减少能源消耗。
弱磁控制的主要原理是在永磁同步电机的运行过程中,通过降低磁通密度和磁场强度
来减少机械损耗和电流损耗,从而实现能耗的优化。
弱磁控制的另一个优点是可以减少永
磁模拟器的成本,因为永磁模拟器可以用绕组替代,从而减少用于控制电流的硬件成本。
弱磁控制的主要步骤包括:
1. 建立永磁同步电机的数学模型。
对于永磁同步电机的数学模型,可以采用矢量控
制法、电气模型和磁路模型等多种方法进行建模。
2. 选择合适的控制策略。
弱磁控制中,可以采用间接矢量控制和直接转矩控制两种
策略。
其中,采用直接转矩控制可以在永磁同步电机低速运行时减少电流损耗。
3. 设计控制算法。
控制算法是实现弱磁控制的关键,需要综合考虑控制精度、实时性、稳定性等因素进行设计。
4. 实现控制。
弱磁控制需要通过电子控制器来实现,在控制器中可以使用DSP、FPGA、ARM等芯片进行实现。
弱磁控制的实际应用需要考虑到永磁同步电机的不同工作状态。
在低速运行状态下,
弱磁控制可以减少永磁同步电机的电流损耗和机械损耗;在高速运行状态下,弱磁控制可
以减少永磁同步电机的谐波噪声和振动。
慢速吊钩桥式起重机电气变频控制使用弱磁调速方案
=
重 载时在 额 定 频 率 以下 调 速 ,轻 载 空 载 时 在 额 定
频率 以上 调速 即弱磁 调速 。 采用 弱 磁 调 速后 ,可 以优 化 机 械 机 构 ,去 掉
4 . 4 Nl 1 4 . 4 4 f i n 1 1
副起 升机 构 ,从 而 去 掉一 整 套设 备 ,包括 电动 机 、
基 蠡 j 亡 / 匿 王 r
度可达 1 0 m m i n ,一个 工作 循 环共需 2 m i n ,效 率
提高 一半 。
3 . 2 设置 方法
了 = 杏 一 岳 / \ 杏 ▲ T 堡
— —
\ 蛊 \
岳 杏
通过调 整设 置 变 频 器 参 数 ,将 其 最 大 速 度 值
目前 ,在用 的慢 速 吊钩 桥 式 起 重 机 电气 变 频
控制起 升 机 构 多 为 2套 电控 系统 ,即起 升 机 构 按 负 载情况 分 为 主起 升 和副 起 升 ,主起 升 用 来 吊重
速 吊钩桥 式 起 重 机 电气 变 频 控 制 基 本 以 基 频 以下
的恒 磁通 变频 调速 为 主 。
和最小 速度 值设 定 为 电机额 定速 度 的 2倍 。
起 升机 构 的主令 通 常为 3个挡 位 。 以 6极三 相 异 步 电机 为 例 ,在 额 定 频 率 以 下 时 ,设 定 3个 挡
‘- -一
] t
_ 十
十
ห้องสมุดไป่ตู้
/ \ 岳
一
L
’
J - .
一
慢速 吊钩 桥 式 起 重 机 电气 变 频 控 制 使 用 弱 磁 调速 后 ,即 可 将 双 起 升 机 构 合 并 为 单 起 升 机 构 。
变频器的磁场调节技术

变频器的磁场调节技术随着工业自动化水平的不断提高,变频器作为一种重要的电力控制装置,被广泛应用于各个领域。
在变频器的工作过程中,磁场调节技术起到至关重要的作用。
本文将介绍变频器的磁场调节技术及其应用。
一、磁场调节技术的概念和原理磁场调节技术是指通过改变电机的磁场强度和方向来实现对电机运行状态的控制。
变频器通过控制电机的输入电流,通过调节驱动器输出电压的频率和幅值,使电机的磁场发生变化,从而实现对电机的速度、转矩和位置等参数的调节。
二、磁场调节技术的分类磁场调节技术可以分为磁场强度调节和磁场方向调节两种类型。
1. 磁场强度调节磁场强度调节是指通过改变电流大小来调节电机产生的磁场强度。
变频器通过控制电机输入电流的大小,可以实现对电机的转矩和速度的调节。
磁场强度调节常用于对电机的启动和停止过程进行控制,可以实现平稳起动和减速停止,提高电机的运行效率。
2. 磁场方向调节磁场方向调节是指通过改变电流方向来调节电机产生的磁场方向。
变频器通过控制电机输入电流的方向,可以改变电机的转矩方向和运动方向。
磁场方向调节常用于对电机的正转、反转和换向控制,可以实现电机的正反转和正反转频率的调节。
三、磁场调节技术的应用磁场调节技术广泛应用于各个领域的电机控制中,特别是在工业自动化生产线中的应用最为常见。
1. 工业生产线中的应用在工业生产线中,变频器通过磁场调节技术可以实现对电机的转速和转矩的调节,从而实现生产线的自动化控制。
通过精确的磁场调节,可以提高生产线的生产效率和产品质量,降低能耗和物料损耗。
2. 交通运输领域中的应用在交通运输领域中,磁场调节技术被广泛应用于电动汽车和电动列车等交通工具的驱动系统中。
通过精确的磁场调节技术,可以实现对电动交通工具的速度和转矩的调节,提高交通工具的运行效率和能源利用率,减少对环境的污染。
3. 家电领域中的应用在家电领域中,磁场调节技术被广泛应用于洗衣机、冰箱、空调等家用电器的驱动系统中。
一种新的内置式永磁同步电机弱磁调速控制方法
一种新的内置式永磁同步电机弱磁调速控制方法摘要随着永磁同步电机在工业和家用领域的广泛应用,对其高效节能和高性能调速控制的需求也越来越重要。
本文提出了一种新的内置式永磁同步电机弱磁调速控制方法,通过对电机的电流和转矩进行实时监测和控制,实现了有效的弱磁运行。
该方法能够在降到弱磁状态的同时保持较高的效率和稳定性。
1.引言永磁同步电机具有高效率、高功率因数、高性能等特点,已广泛应用于多种工业和家用领域。
然而,传统的调速控制方法在弱磁状态下会导致效率的降低和性能的损失。
因此,如何实现高效率和高性能的弱磁调速控制成为一个研究热点。
内置式永磁同步电机是一种新型的永磁同步电机结构,其磁极与转子磁极一体化。
本文提出的弱磁调速控制方法主要通过控制电机的电流和转矩来实现。
2.1电流控制在弱磁状态下,电机的电流响应特性发生变化,会导致电机损耗的增加和效率的降低。
因此,通过实时监测和控制电机的电流,可以减少损耗并提高效率。
本文提出了一种基于模型预测控制(MPC)方法的电流控制策略。
该方法通过准确建立电机的数学模型,预测电机的电流响应,并根据预测结果进行实时调整。
2.2转矩控制弱磁状态下,电机的转矩输出能力减弱,容易导致性能下降和效率降低。
为了提高电机的转矩输出能力,本文提出了一种基于磁链调整的转矩控制方法。
该方法通过实时监测电机的磁链,调整电机的电流和磁场分布,从而实现良好的转矩输出。
3.实验结果和讨论通过对一台内置式永磁同步电机进行实验,验证了本文提出的弱磁调速控制方法的有效性和可行性。
实验结果表明,该方法能够在降到弱磁状态的同时保持较高的效率和稳定性。
4.总结本文提出了一种新的内置式永磁同步电机弱磁调速控制方法,通过对电机的电流和转矩进行实时监测和控制,实现了有效的弱磁运行。
该方法能够在降到弱磁状态的同时保持较高的效率和稳定性,具有很大的应用潜力。
弱磁控制原理

弱磁控制原理弱磁控制原理一、概述弱磁控制是指在某些电动机的起动和运行过程中,将电机的励磁电流降低到一定程度,使得电机的输出功率略有降低,但可以大幅度地节省能源。
这种技术被广泛应用于各种类型的电机中,如交流异步电机、直流电机、永磁同步电机等。
本文将详细介绍弱磁控制的原理及其应用。
二、弱磁控制原理1. 弱磁控制的基本思想弱磁控制是通过调节电动机的励磁电流来实现降低输出功率和节能的目的。
在正常运行时,励磁电流通常较高,但在某些情况下,如负载较轻或要求较低的速度精度时,可以适当地降低励磁电流。
这样做可以减少铜损耗和铁损耗,从而达到节能减排、延长设备寿命等效果。
2. 弱磁控制对输出特性的影响在弱磁状态下,由于励磁电流的降低,电机的输出功率也会相应地降低。
但是,由于铜损耗和铁损耗的减少,电机的效率却有所提高。
因此,在一定范围内,弱磁控制可以实现节能的同时不影响电机的正常工作。
3. 弱磁控制对电机运行稳定性的影响在弱磁状态下,由于励磁电流较低,电机转子上的永磁体或感应器件所产生的磁场将会对励磁线圈产生一定程度上的干扰。
这种干扰可能会影响到电机运行的稳定性和精度。
因此,在使用弱磁控制时需要根据具体情况进行合理调整。
4. 弱磁控制对系统响应速度的影响在弱磁状态下,由于输出功率较低,电机响应速度也会相应地减慢。
这可能会影响到某些需要快速响应的场合。
因此,在使用弱磁控制时需要根据具体情况进行合理调整。
三、弱磁控制技术在不同类型电机中的应用1. 交流异步电机中的应用在交流异步电机中,弱磁控制可以通过调节励磁电流来实现降低输出功率和节能的目的。
这种技术被广泛应用于风机、水泵等负载较轻的场合。
此外,在一些需要精确控制转速的场合,如纺织机械、卷绕机等,也可以使用弱磁控制技术。
2. 直流电机中的应用在直流电机中,弱磁控制可以通过调节励磁电流来实现降低输出功率和节能的目的。
这种技术被广泛应用于风机、水泵等负载较轻的场合。
此外,在一些需要快速响应和高精度控制的场合,如半导体设备、医疗设备等,也可以使用弱磁控制技术。
变频电机弱磁曲线

变频电机弱磁曲线
变频电机弱磁曲线是指变频电机在低负载或空载情况下的磁化特性曲线。
这个曲线通常用来描述电机在低电流和低磁通下的性能,即在电机未承受负载或仅受到轻负载时的磁场特性。
变频电机弱磁曲线的关键特点包括:
1.非线性特性:在弱磁区域,磁场特性通常是非线性的,这意味
着电机的磁化特性不遵循线性磁化规律。
2.磁滞:在弱磁区域,电机的磁滞效应明显,即在磁场的变化方
向上存在一定的延迟和迟滞,导致电机的响应不是瞬时的。
3.饱和:在弱磁区域,电机的铁芯通常尚未完全饱和,这意味着
增加电流并不会线性增加磁通,而是逐渐饱和,磁通增加的速
度会减小。
4.低效率:在弱磁区域,电机的效率通常较低,因为电机产生的
磁通相对较小,需要更多的电流来实现所需的输出。
变频电机弱磁曲线对于电机设计和性能评估非常重要,特别是在需要高精度控制和响应的应用中。
了解电机的弱磁特性有助于优化电机的控制算法,提高电机的效率和性能。
这些曲线通常由制造商提供,并可用于电机的设计和选型。
关于电机在弱磁状态下的调速问题
关于电机在弱磁状态下的调速问题什么叫弱磁呢?什么情况下应该考虑这个问题呢?答:当电机需要超过额定转速运行时,需要用到弱磁,弱磁出现在直流控制中的较多,直流电机在满磁下在额定速度下可以输出最大转矩,要想得到更高的速度就得减小励磁,但是是以减小转矩为代价的.一般直流调速器用到的多.弱磁的概念来自于直流传动控制,在其速度计算公式中速度与磁场的强度成反比。
一般电机的控制在其达到额定转速之前是按照恒转矩方式进行控制的,电机速度与电枢电压成正比,而达到了额定转速后则按照恒功率方式进行控制,电枢电压恒定,电机速度与磁场强度成反比。
交流电机的矢量控制是根据直流电机的模型进行控制的,因以沿用了直流电机的概念。
变频器输出电压不会超过进线电压.现在一般电机额定电压是380额定频率是50,电源电压一般也是380,当频率超过50.但输出电压不能超过380,导致磁通变小,自然回导致力矩下降.若电机额定频率是100HZ额定电压380,那在100HZ以上才是弱磁区.转矩闭环是相对于电流闭环而言的(不讨论转速闭环,因这和转速闭环不冲突)。
对恒磁通情况,转矩是正比于电流的。
但对于变磁通方式,转矩并不只正比于电流,还与磁通(并不是励磁电流)成反比。
在电流闭环情况下,当电机弱磁时,功率不变,但转矩降低,降低的原因是电流受控制系统限制不再增加,而磁通却减小了。
在转矩闭环情况下,当电机弱磁时,为保证转矩不降低,输出电流要相应的增加以弥补磁通减小的损失。
此时电机会处于过载状态,输出功率也就相应的增大了。
电机输出高于额定功率的功率不是什么稀奇的事,只要电机能承受,闭环系统的优越性就可以发挥的淋漓尽致!关于电机在弱磁状态下的调速问题在电机应用上必须保证在额定转速以下呢?如果要超过了额定转速应该调整有关弱磁方面的哪些参数呢?在传动专业,调速范围和弱磁升速尽管是专业术语,但也是热点专业知识,就是说,大量应用的专业知识。
如果一个电机,讨论它的调速范围和驱动能力的话,不会不涉及弱磁调速、恒转矩特性、恒功率特性等概念,因为一个电机的外特性,就把这个电机的特性包括了。
弱磁控制在变频矢量控制系统中的应用

第12卷第2期2005年4月工程设计学报Journa l of Eng i neer i ng D esignV o l .12N o.2A p r .2005收稿日期:2004212213.作者简介:颜钢锋(1959-),男,浙江永康人,教授,从事智能控制、电力电子应用等研究,E 2m ail :ygf @lee .zju .edu .cn .弱磁控制在变频矢量控制系统中的应用颜钢锋,李 锋(浙江大学电气工程学院,浙江杭州310027)摘 要:随着电力电子器件和数字信号处理器的发展,基于D SP 的变频矢量控制逐渐成为电机控制的趋势Λ在介绍弱磁控制原理的基础上,将弱磁控制融入控制策略中Λ试验结果表明,系统的调速范围宽,动态响应快,性能优良Λ关键词:弱磁控制;变频调速;矢量控制中图分类号:TM 921.51 文献标识码:A 文章编号:10062754X (2005)022*******Appl ica tion of f lux -weaken i ng con trol i n var i able frequency andadjustable speed vector con trol systemYAN Gang 2feng ,L I Feng(Co llege of E lectrical Engineering ,Zhejiang U niversity ,H angzhou 310027,Ch ina )Abstract :W ith the developm en t of so lid state pow er devices and D SP ,variab le frequency vecto r con tro l based on D SP has been the trend fo r electrom o to r con tro l.O n the basis of in troducing ,the p rinci p les of flux 2w eaken ing con tro l ,flux 2w eaken ing con tro l is em erged in to con tro l strategy .T he resu lt of experi m en ts indicates that such system ach ieves b roader range ofadju stab le sp eed ,faster dynam ic respon se and better p erfo r m ance .Key words :field w eaken ing con tro l ;frequency conversi on and variab le speed ;field o rien ted con tro l 三相永磁同步伺服电机的模型是一个多变量非线性强耦合系统,为了对其进行控制,必须对转矩的控制参数进行解耦Ζ转子磁场定向控制是一种常用的解耦控制方法[1]Ζ如图1,三相永磁同步电动机的转矩方程为T m =p (7d i d -7q i q )=p [7f i q -(L d -L q )i d i q ],(1)式(1)中,7d ,7q 为定子磁链在d ,q 轴上的分量;7f是转子磁钢在定子上的耦合磁链,它只有在d 轴上存在;p 是转子的磁极对数;L d ,L q 是永磁同步电动机d ,q 轴的主电感Ζ对于凸极式转子,L d =L q ,转矩方程变为T m =p 7f i q =p 7f i s sin Β.因为是永磁转子,7f 是一个不变的值,所以只要保持i s 和d 垂直,就可以像直流电动机控制那样,通过调整直流量i q 来控制转矩,从而实现控制参数的解耦Ζ矢量控制就是仿照直流电动机的控制方式,把d oq 同步旋转坐标系放在转子上,随转子同步旋转,把电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流),分别加以控制Λ系统以T I 公司的电机控制专用芯片2407A 为核心,采用转速和磁通都闭环的矢量控制策略,电路简单方便Λ试验结果表明,系统的响应速度快,同时由于采用弱磁控制,使得系统实现了很宽的调速范围Λ图1 电机磁场矢量图F ig .1 M agnetic field vecto r of electromo to r1 弱磁控制电机超过基速以上运行时,因永磁转子的励磁磁链为常数,所以电动机的感应电动势随转速增加而增加,端电压也随之增加,但端电压要收逆变器最高电压U 的限制,通过削弱磁场的方法可以在保持端电压不变的情况下提高转速,这种方法称为弱磁控制Ζ如图2所示,电机变频调速的时候分为3个区域:(1)恒转矩区,也就是常说的基频以下调速;(2)恒功率区;(3)恒(功率×速度)区Ζ图2 机械特性F ig .2 M ach ine characteristic 在试验中系统对d 和q 轴的电压控制是通过P I 方式调节的,饱和装置用于限定i d 的上下限,如图3所示,V d r ,V qr 分别是定子在旋转坐标系中的参考电压分量,由V r =V 2d r +V 2qr 计算出的值与电机的反电动势进行比较,为了使得定子电流不超过其额定值i s m ax ,i d r 与i qr 应满足i q m ax =i 2s m ax -i 2qr ,平方根采用牛顿迭代法求得Ζ通过这样来确定的相电流,可以使相电压保持在名义电压值下工作,从而达到希望的转速,同时又使相电流不会超过其额定值,达到了在基速以上调速的目的Ζ2 系统的结构及其软硬件的实现[3]2.1 系统的结构该系统采用交2直2交电压型变频电路,分为主电源电路和控制电路两大块Λ主电源电路主要由整流电路、滤波电路及智能功率模块IPM 构成的逆变电路组成;控制电路以T I 的D SP 芯片TM S 320F 2407A 为核心,包括电流检测模块、转速检测模块、保护模块、通信模块和显示模块Λ其系统硬件结构框图如4所示Λ图3 弱磁控制算法F ig .3 A rithm etic of field w eakening contro l图4 系统硬件框图F ig .4 System hardw are fram e 系统的指令由上位机发出,两者之间采用串口通信,并实时显示电机的转速Λ整个控制系统框图见图5Λ・201・工 程 设 计 学 报第12卷图5 控制系统框图F ig .5 T he contro l system fram e2.2 系统的硬件电路2.2.1 逆变电路与转速测量[4]系统的逆变采用PWM 方式,用智能功率模块IPM 作为功率开关器件,选用三菱公司的IPM 模块,耐压1200V ,额定电流为10A 的IPM 模块:PM 10R SH 120Λ系统转速测量采用的是增量式光电编码器,该系统采用欧姆龙公司的旋转编码器,型号是E 6B 22C W Z 6C ,光电脉冲编码器的A ,B 输出通过高速光隔接到TM S 320F 2407A 的Q EP 1,Q EP 2上Λ2.2.2 电流检测电路电流检测模块就是把交流异步电机的三相定子电流转换成相应的二进制代码,以方便处理Λ因为本课题研究的是三相平衡系统i a +i b +i c =0,因此只要检测其中两路电流,就可以得到三相电流Λ系统中采用的L E M 模块型号为BL YT 52CN P 12C 4,测流范围为0~5A ,其工作电压为±15V Λ2.3 系统的软件设计[2,4]由于系统对电的反应时间比对转速的反应时间快很多,所以该系统设计中,对转速的采样计算是每28个PWM (pu lse w idth m odu lati on )周期计算一次,中断流程如图6所示Λ图6 中断控制流程图F ig .6 T he flow chart of the interrup t contro l・301・ 第2期颜钢锋,等:弱磁控制在变频矢量控制系统中的应用3 试验结果该系统的试验对象是一台三相同步永磁电机,额定转速是3000r m in ,额定功率是680W ,额定转矩是2.2N ・m Λ电机在20H z 和70H z 两种频率下定子的相电流波形如图7和图8所示Λ然后设定频率为40H z 时,对从空载突变到负载时的转速和相电流进行观察,测量的波形如图9所示Λ图7 20Hz 时定子的相电流波形F ig .7 Phase w ave of stato r at 20Hz图8 70Hz 时定子的相电流波F ig .8 Phase current w ave of stato r at 70H z由图9可以看到,当系统的转矩突然发生变化图9 系统突变时转速和相电流变化图F ig .9 T he ro tate speed and phase current movem entw ave时,系统转速、相电流响应快速,稳态误差近乎3%,系统的动静态性能较好Λ从以上的分析和试验结果可见,将弱磁控制融入变频矢量调速系统中后,系统的变频性能得到改善,在空载和负载情况下,系统的调速范围宽,响应速度快,性能良好Λ参考文献:[1]王晓明.电动机的D SP 控制2T I 公司D SP 应用[M ].北京:北京航空航天大学出版社,2004.WAN G X iao 2m ing .Contro ling E lectromo to r w ith D SP —the A pp licati on of D SP of T EXA S Instrum ents [M ].Beijing :BeijingU niversityofA eronautics&A stronautics P ress ,2004.[2]陈国金.交流电动机矢量控制的D SP 实现[J ].机电工程,2004,21(6):27-30.CH EN Guo 2jin .R ealizati on of A C mo to r vecto r contro l basedonD SP [J ].M echanical&E lectricalEngineering ,2004,21(6):27-30.[3]赵文祥.基于D SP 的全数字矢量控制SV P WM 变频调速系统[J ].电机与控制学报,2004,8(2):175-178.ZHAOW en 2xiang .T hedigitalvecto r 2contro lledSV P WM variable frequency speed -adjustable system based on D SP [J ].E lectric M ach ines and Contro l ,2004,8(2):175-178.[4]刁红泉.基于单片机的改进型五相混合式步进电机驱动器设计[J ].工程设计学报,2004,11(1):19-22.D I AO Hong 2quan .D esign of five 2phase hybrid stepp ing mo to r refo r m ative driver based on M CU [J ].Journal of Engineering D esign ,2004,11(1):19-22.・401・工 程 设 计 学 报第12卷。
弱磁点
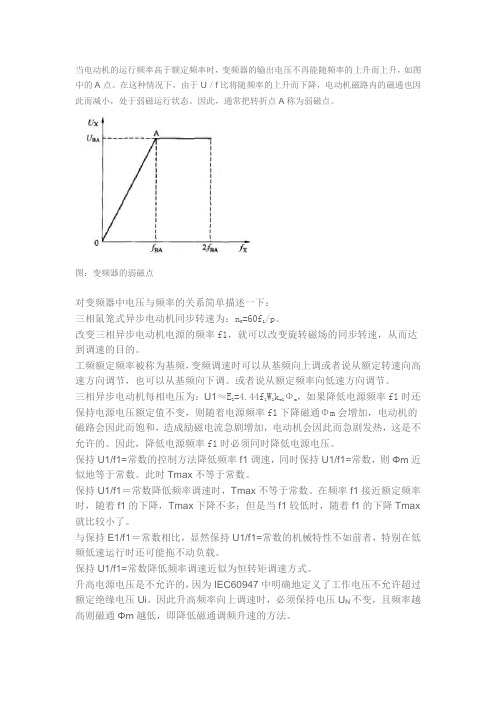
当电动机的运行频率高于额定频率时,变频器的输出电压不再能随频率的上升而上升,如图中的A点。
在这种情况下,由于U/f比将随频率的上升而下降,电动机磁路内的磁通也因此而减小,处于弱磁运行状态。
因此,通常把转折点A称为弱磁点。
图:变频器的弱磁点对变频器中电压与频率的关系简单描述一下:三相鼠笼式异步电动机同步转速为:n0=60f1/p。
改变三相异步电动机电源的频率f1,就可以改变旋转磁场的同步转速,从而达到调速的目的。
工频额定频率被称为基频,变频调速时可以从基频向上调或者说从额定转速向高速方向调节,也可以从基频向下调。
或者说从额定频率向低速方向调节。
三相异步电动机每相电压为:U1≈E1=4.44f1W1kw1Фm,如果降低电源频率f1时还保持电源电压额定值不变,则随着电源频率f1下降磁通Φm会增加,电动机的磁路会因此而饱和,造成励磁电流急剧增加,电动机会因此而急剧发热,这是不允许的。
因此,降低电源频率f1时必须同时降低电源电压。
保持U1/f1=常数的控制方法降低频率f1调速,同时保持U1/f1=常数,则Φm近似地等于常数。
此时Tmax不等于常数。
保持U1/f1=常数降低频率调速时,Tmax不等于常数。
在频率f1接近额定频率时,随着f1的下降,Tmax下降不多;但是当f1较低时,随着f1的下降Tmax 就比较小了。
与保持E1/f1=常数相比,显然保持U1/f1=常数的机械特性不如前者,特别在低频低速运行时还可能拖不动负载。
保持U1/f1=常数降低频率调速近似为恒转矩调速方式。
升高电源电压是不允许的,因为IEC60947中明确地定义了工作电压不允许超过额定绝缘电压Ui。
因此升高频率向上调速时,必须保持电压U N不变,且频率越高则磁通Φm越低,即降低磁通调频升速的方法。
现在就可以看出楼主和版主hugh huang给出的问题了,就是:当频率从基频向上调速时,我们必须保持电压。
但是当频率改变到一定程度时,因为电压保持不变,电动机定子线圈内的磁通量降低,此点被称为弱磁点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 18 卷
第7 期
2014 年 7 月
电 机 与 控 制 学 报 Electri c Machines and Control
Vol. 18 No. 7 July 2014
变频空调驱动电机的弱磁控制
陈宁, 张跃, 桂卫华, 喻寿益
( 中南大学 信息科学与工程学院,湖南 长沙 410083 )
摘
要: 在研究内埋式永磁同步电机 ( IPMSM ) 无速度传感器控制策略的基础上, 阐述了永磁同步 电机弱磁控制的基本原理及弱磁扩速难的原因 . 运用龙贝格观测器估算电机转速, 提出一种基于交
轴电压的弱磁控制方法, 利用交轴电压控制直轴电流, 将交轴电压的期望值与反馈值作差, 计算得 到弱磁电流误差信号, 对其进行 PI 运算得到弱磁电流。采用 Matlab 软件建立了系统仿真模型, 验 证了算法的正确性。针对 1. 5 匹变频空调用永磁同步电机开发了基于 STM32F103R8T6 ARM 的弱 磁控制系统 实 验 平 台, 实验验证该控制算法可将变频空调压缩机驱动电机的可控频率提升 至 120Hz。 关键词: 变频空调; 内埋式永磁同步电机; 弱磁; 龙贝格观测器; 交轴电压
2 i2 利用拉格朗日极值 定子电流 I s = 槡 d + i q 的极小值 , 定理, 引入辅助函数, 即 2 H = i2 d + iq + λ Te -
{
3 p[ iq , ( 3) ψ f + ( L d - L q ) i d] 2
}
其中, λ 为拉格朗日乘子。 对式 ( 3 ) 求偏导并令其 为零, 可解得 id = ψf - 2( Lq - Ld )
内埋式永磁同步电机的 由于宽调速范围要求, [1 ] IPMSM 以其高功 弱磁控制日益受到人们的关注 , 率密度、 高功率因数、 结构紧凑、 调速范围宽等优点, [2 ] 广泛应用于变频空调、 机床、 机器人等数控系统 。 PMSM 的转子励磁磁场由永磁体产生, 无法在高速 下进行恒功率运行。即使是由正弦波 PWM 逆变器 驱动, 利用电流相位角削弱永磁场的 PMSM, 高速下 的输出功率也会随着速度的增加而迅速下降 , 无法 获得较宽的高速恒功率调速范围。这一缺陷严重限 制了扩展 PMSM 的高速应用范围, 扩大其恒功率弱 , 磁运行能力 已经成为变频空调领域研究中的一个 重要课题。 弱磁控制使电机能够在逆变器容量不变的情况 下提高系统的最高速度运行能力; 在最大调速范围 不变的条 件 下, 降低电机的额定容量和逆变器容 [3 - 6 ] 。文献[ 7]提出了弱磁控制的公式计算法, 量 它完全依赖于电机数学模型, 只具有理论研究意义, 8] 很少在实际工程中直接应用。 文献[ 提出了查表 法, 查表法依赖大量的实验数据, 实现起来较为复 9 - 10] 杂。文献[ 提出了利用电压极限椭圆的梯度 下降法, 但是此方法弱磁调速区域的确定需要计算 恒转矩曲线和电压极限椭圆的夹角 , 计算量大, 实现 11] 较复杂。文献[ 提出了负 d 轴电流补偿法, 从数 字化控制系统的特点入手, 分析了电流失控的原因, 利用限幅后的负 d 轴电流进行弱磁控制, 当 d 轴电 流饱和后对 q 轴电流进行弱磁补偿, 达到了一定的 弱磁扩速效果, 但是在电机高速运行时损失了较大 。 的电磁转矩 本文基于无位置传感器控制系统, 提出一种利 用 q 轴电压来调节 d 轴电流设定值的弱磁控制方 法, 对 d 轴电流设定值进行改进的控制方法 , 该方法 控制精度高, 鲁棒性好。
66
电
机
与
控
制
学
报
第 18 卷
0
引
言
u q 分别为 d, q 轴电压; r s 为定子相电阻; ψ f 电流; u d , 为转子永磁磁链; ω e 为电角速度。 输出的电磁转矩方程为 3p iq , Te = [ ψ f + ( L d - L q ) i d] 2 p 为磁极对数。 其中, ( 2)
槡
ψf + i2 q。 4( Lq - Ld ) 2
2
( 4)
d 当 PMSM 运行在稳定状态时, 由式( 1 ) 可知, - q 坐标系下的电压方程可以表示为 ud = rs id - ωe Lq iq ,
uq = rs iq + ωe ( ψf + Ld id ) 。
}
( 5)
1
IPMSM 的数学模型
中图分类号: TM 301. 2 文献标志码: A 文章编号: 1007- 449X( 2014 ) 07- 0065- 07
Flux weakening control for drive motor of inverter air conditioner
CHEN
( 1)
q 轴电感; i d , q轴 L q 分别为 d, i q 分别为 d, 其中: L d ,
第7 期
陈
宁等: 变频空调驱动电机的弱磁控制 式( 10 ) 可化简为 · x = Ax + Bu, y = Cx。 iα 式中: 状态变量 x = [ [ uα iβ eα
T iα u β] ; 输出变量 y = [
收稿日期: 2012 - 07 - 17 基金项目: 湖南省科技计划项目( 2013GK3009 ) ; 广东省省部产学研结合专项基金( 2011A090200097 ) 作者简介: 陈 宁( 1970 —) , 教授, 博士生导师, 研究方向为空调变频调速系统、 系统建模与优化控制; 女, 博士, 张 跃( 1987 —) , 研究方向为永磁同步电机交流调速控制; 男, 硕士, 桂卫华( 1950 —) , 博士生导师, 中国工程院院士, 研究方向为复杂系统建模与优化、 现代交流调速控制; 男, 教授, 喻寿益( 1940 —) , 博士生导师, 研究方向为自适应控制、 现代交流调速控制。 男, 教授, 通讯作者: 陈 宁
IPMSM 的矢量控制基于转子磁场定向的旋转
考虑到逆变器的输出能力和电机的额定参数, 定子电流 I s 和定子端电压 V s 的约束方程为 i d + i q ≤I sm , 槡 2 u2 Vs = 槡 d + u q ≤ V sm 。 Is =
2 2
( 6) ( 7)
两相 d - q 坐标系, 在此坐标系下建立 IPMSM 的数 学模型是最简单有效的。IPMSM 在定子两相旋转 d - q 坐标系下的电压方程为 Ld Lq di d = - rs id + ud + ωe Lq iq dt
di q = - rs iq + uq - ωe ( ψf + Ld id ) 。 dt
}
其中: I sm 为逆变器能承受电流的最大幅值; V sm 为逆 变器输出电压的最大幅值。 通过控制 d 轴和 q 轴电枢电流, 可以使得电机 在基速以上恒功率弱磁区域运行时的定子端电压等 于逆变器输出的极限电压, 即 V s = V sm 。 如图 1 所示, 在 d - q 平面上, 电流约束方程是 0 ) 点。 B 点是电 圆心在 ( 0 , 一个以 I sm 为半径的圆,
2
2. 1
弱磁运行区域分析
最大转矩电流比曲线 由于 IPMSM 的 d 轴电感小于 q 轴电感, 负d轴 电流 可 以 增 加 磁 阻 转 矩 分 量。 最 大 转 矩 电 流 比 ( maximum torque per ampere , MTPA) 控制算法[12 - 16]
目的就是在基速以下的恒转矩区域内由给定的转矩 控制使得定子电流幅值最小。 求 以上问题可以等效为, 以式 ( 2 ) 为约束条件,
如 式( 4) 体现在 d - q 坐标轴下是一条双曲线, 图 1 中 AB 曲线所示。这条曲线上的点在给定电流矢 量的基础上能输出最大转矩。随着电机转速的升高, 电机将沿着曲线 BC 和最大转矩电压比曲线 MTPV
[ 17 ] 运行。 随着转速的升高, 转矩的输出能力逐渐减小 。 2. 2 电压极限环和电流极限环
D 棕b 棕1 棕2 棕3
A O
棕b<棕1<棕2<棕3
图1 Fig. 1
IPMSM 运行时电流、 电压轨迹图
A= B=
-
rs Ls
0 - rs Ls
-
1 Ls
0 0 0 1 / Ls 0
0 ωe 0
0 0 0 0 0 0 0
Trajectory of current and voltage of IPMSM
忽略定子电阻压降, 由式 ( 5 ) 得到 d 轴电 此外, 流 id 为 uq ψf id = - 。 ωe Ld Ld 作为约束条件的不等式为 i2 q V sm ωe Lq ( 8)
[
1 / Ls
67
流极限圆和 MTPA 曲线的交叉点, 电机电流指令工 作在这一点的速度 ω b 就称为基速。
- 鬃f Ld MTPA B MTPV C iq Teb Te1 Te2 Te3 id
}
( 11 )
T e β] ; 输入矢量 u =
T i β] ; A、 C 分别为 Β、 状态矩阵、 输入矩阵及输出矩阵, 表示为
( School of Information Science and Engineering,Central South University,Changsha 410083 ,China)
Abstract: Based on the research of Interior permanent magnet synchronous motor ( IPMSM ) sensorless control strategy ,the basic principle of PMSM flux weakening control and the reason of technique difficult point of flux weakening were explained. Using a Luenberger observer for speed estimation ,flux weakening control method based on motor speed and voltage of qaxis was proposed ,daxis current was controlled by qaxis voltage ,the error signal of demagnetization current was obtained by subtracting actual value from feedback value of the qaxis voltage ,and the demagnetization current was gained by using PI operation of its error signal. The SIMULINK model was founded by Matlab ,and the validity of this method was testified by the simulation results. The experiment platform of the 1. 5P inverter airconditioner IPMSM flux weakening control system was implemented by using STM32F103R8T6 ARM. It is verified by experimental results that the controllable frequency of PMSM can be improved up to 120Hz by the proposed flux weakening algorithm. Key words: inverter air conditioner; interior permanent magnet synchronous motors; flux weakening; Luenberger observer ; qaxis voltage