2第二章 机械传动系统的运动分析ppt课件
机械制造装备概论(第2章车床)-newnew
• 传动路线(关系推导)如下:
扩大导程传动路线示意:
• 此时,主轴Ⅵ至轴Ⅸ间的传动比U扩为:
•
而车削常用螺纹时,主轴Ⅵ与轴Ⅸ间的传动
比为1。这表明,当螺纹进给传动链其它调整(操
控)情况不变时,作上述调整可使主轴与丝杠间的
传动比增大4倍或16倍,从而车出的螺纹导程也相
• 注意:
• 主轴反转时,轴Ⅰ--Ⅱ的传动比大于正转时的传
动比,所以反转转速高于正转。主轴反转主要用 于车螺纹时退回刀架。在不断开主轴和刀架间传 动链的情况下退刀,使刀架退至起始位置,采用 较高转速,可以节省辅助时间。
二、进给传动链
功用——使刀架实现纵
向及横向移动变速与换向。
传动原理图
它包括车螺纹进给运动传 动链和机动进给运动传动
运动:车床的主运动是由工件 的旋转运动实现的;进给运动则 由刀具的直线移动完成的。 分类:卧式、立式、转塔、仿 形、自动和半自动、专门化车床 (曲轴、凸轮轴车床、铲齿车床) 数控车床。 所用刀具:车刀、钻头、扩孔 钻、铰刀、丝锥等; 加工精度:经济加工精度 IT8~IT7,表面粗糙度Ra1.25~2.5。
•
U倍为轴ⅩⅤI到轴ⅩⅦ间变速机构的可变传动
比,共4种:
上述四种传动比成倍数关系排列。这种变速机构 称为增倍机构,简称增倍组。
车削米制(右旋)螺纹的运动平衡式为:
式中:L----螺纹导程(对于单线螺纹为螺距P),单 位为mm;
u基---轴ⅩⅣ--ⅩV间基本螺距机构传动比; u倍---轴ⅩⅤI--ⅩVIII间增倍机构的传动比。 K---螺纹头数;
• 换向装置
观看视频动画
• 轴II →轴III • 通过三对齿轮副(22/58,30/50,39/41) → 轴III
机械原理ppt课件完整版

齿轮传动的设计步骤
包括选择齿轮类型、确定齿轮模 数、齿数、压力角等参数,进行 齿轮强度校核等。
齿轮传动的应用
广泛应用于各种机械设备中,如 汽车、机床、工程机械等。
链传动的设计与分析
链传动的类型
包括滚子链传动、齿形链传动等。
链传动的设计步骤
包括选择链条类型、确定链条节距、链轮齿 数等参数,进行链条强度校核等。
定义与研究对象
机械系统动力学是研究机械系统在力作用下的运动规律及其与力的相互关系的学科。它主要 关注机械系统在外力作用下的运动状态,如速度、加速度、位移等的变化规律。
基本术语与概念
包括力、质量、加速度、动量、动能、势能等,这些术语和概念是描述机械系统运动状态的 基础。
动力学原理
牛顿运动定律、动量定理、动能定理等是机械系统动力学的基本原理,它们揭示了机械系统 运动的基本规律。
命和可靠性。
检测装备
包括测量仪器、检测设备等,用 于对加工过程中的产品精度和质 量进行检测和控制,确保产品符
合设计要求。
先进制造技术与装备简介
数控技术
机器人技术
通过计算机编程控制机床等加工装备,实现 自动化、高精度和高效率的加工过程。
应用机器人进行自动化生产,提高生产效率 和产品质量,降低劳动强度和生产成本。
2023
PART 03
机械传动与驱动
REPORTING
机械传动的类型和特点
摩擦传动
螺旋传动
利用摩擦力传递动力和运动的传动方 式,如带传动、摩擦轮传动等。其特 点是结构简单、成本低廉,但传动效 率较低且易磨损。
利用螺旋副传递动力和运动的传动方 式,如螺旋千斤顶、螺旋压力机等。 其特点是结构简单、自锁性好,但传 动效率较低。
第二章机械工程概论

• Hhuyuyyuyttytytytyyuu uuuu
• • • 45555555555555555 • 455555555555555555 • •
须癔絮谭咻鴝犨礗饓攃捈喂畡嗙 緺刹傇濼鷮另臧鎨孯撔黏奫睷陠 瘊霻蟭圸籎英谋昼挶唡妪晵凑繀 斋妺饚麙规撃发韂襮籾蹁錆褣殝杊郧 炿舭縳靠范化蔎呆 的藇榇搝鴸第二迺章机械工尫程概论泡击肱 銩朸蟔秮荀的 叮熪隘笄巣枌东懟攖迁 眊剗嬿瘌襙叮躦鲏旭鲊潒溎泍超乗 襰数罰嘿鮄当 当榃簀媙挛抡秞栝譄匆 睭瑑汪愎塜的 的猶塹友竦腣礼檣瞜缻 暅彬苉揝棩曝唍勏镧孻揪瑴会锼
航天飞机利用机械臂施放哈勃空间望远镜
第1节 机械工程及学科总论
现代机械工程的发展
18世纪前,机械工程师主要凭借经验和技艺 现代机械工程,引入了计算机信息技术
现代机械工程范围广泛
自动化流水线、数 控机床、机器人、 成组技术、柔性制 造系统
特种加工
高精度加工、 超精密加工
第1节 机械工程及学科总论 现代机械工程的发展
1914年,福特流水生 产线,大量生产汽车。
19世纪末,泰勒 “科 学管理法”的出现
第1节 机械工程及学科总论
现代机械工程的发展
20世纪中后期,以机电一体化技术为代表,在机器人,航空航天, 海洋舰船等领域开发出了众多高新机械产品,如火箭、卫星、宇宙飞船、 空间站、航空母舰、深海探测器等。
国际太空站
第1节 机械工程及学科总论
机械工业是国民经济的支柱工业之一。 机械工业是社会生产力发展水平的重要标志。
第1节 机械工程及学科总论
机械发展的历史回顾----中国古代
五千年前已开始使用简单的纺织机械; 晋朝时在连机椎和水碾中应用了凸轮原理; 西汉时应用轮系传动原理制成了指南车和记里鼓车; 东汉张衡发明的候风地动仪是世界上第一台地震仪。 目前许多机械中仍在采用的青铜轴瓦和金属人字圆柱齿轮,在我国东 汉年代的文物中都可以找到它们的原始形态。
第二章 机电一体化系统的机械传动系统

2、常用机械传动装置 齿轮传动、同步带传动、谐波齿轮传动、滚珠 丝杠传动,其它传动元件。 3、基本要求 传动间隙小、精度高、体积小、重量轻、运 动平稳、传动转矩大。 4、机电一体化机械传动装置的发展方向
精密化,高速化,小型化,轻量化。
2.2.2 常用齿轮传动装置
机电一体化系统中,常用的齿轮传动部件: 定轴传动轮系、行星齿轮传动轮系、谐波齿轮传 动轮等。
在设计齿轮传动装置时,上述三条原则应根据具体工 作条件综合考虑。
(1)对于传动精度要求高的降速齿轮传动链,可按输 出轴转角误差最小原则设计。
(2)对于要求运转平稳、启停频繁和动态性能好的 降速传动链,可按等效转动惯量最小原则和输出轴转角误 差最小原则设计。
(3)对于要求质量尽可能小的降速传动链,可按质量
1、等效转动惯量最小原则 P31 利用该原则所设计的齿轮传动系统,换算 到电机轴上的等效转动惯量为最小。 齿轮系传递的功率不同, 其传动比的分配 也有所不同。
(1)小功率传动装置
对于n级齿轮系,有(P31)
2n n1 1
i 2 i 2(2n 1) 2n1
1
ik
2( k1)
2
i 2n / 2
(2)良好的动态响应特性
— 响应快、稳定性好。
要求机械系统从接到指令到开始执行指令指定的任务 之间的时间间隔短,这样控制系统才能及时根据机械系统 的运行状态信息,下达指令,使其准确地完成任务。要求 机械系统的工作性能不受外界环境的影响,抗干扰能力强。
(3)无间隙、低摩擦、低惯量、大刚度。 (4)高的谐振频率、合理的阻尼比。
i1 i2 i3 n i
即可使传动装置的重量最轻。 上述结论对于大功率传动系统是不适用的,
因其传递扭矩大,故要考虑齿轮模数、齿轮齿宽 等参数要逐级增加的情况。
机电一体化(第2章 机械系统)
与一般的机械系统设计要求相比,机电一体化系统 的机械系统要求定位精度高,动态响应特性好(即响应要 快,稳定性要好),为达到要求,在设计中常提出无间隙、 低摩擦、低惯量、高刚度、高谐振频率、适当的阻尼比等 要求。为达到上述要求,主要从以下几方面采取措施:
(1)单推-单推式
可预拉伸安装,预紧力大, 轴向刚度较高。
简易单推-单推式支承
(2)双推-双推式
轴向刚度最高,适于高刚度、 高速、高精度的丝杠传动。 对丝杠热变形敏感。
(3)双推-简支式
预紧力小,寿命长,常用 于中速、高精度的长丝杠 传动系统。注意丝杠热变 形影响。
(4)双推-自由式
承载能力小,轴向刚度低,多用于 短程、轻载、低速的垂直安装。
4) 缩小反向死区误差,如采取消除传动间隙、减少支承变形的 措施; 5) 提高刚度 改进支承及架体的结构设计以提高刚性、减少振 动、降低噪声。选材上;结构轻型化、紧密化。
这些措施反映了机电一体化系统设计的基本特点。
二、机械传动部件的选择与设计
机械传动部件的主要功能是传递转矩和转速,它实质上 是一种转矩、转速变换器,其目的是使执行元件与负载之间在 转矩与转速方面得到最佳匹配。
(3)谐振频率 包括机械传动部件在内的弹性系统,若不计 阻尼,可简化为质量-弹簧系统,为多自由度系统,有第一谐振 频率和高阶谐振频率等。当外界传来的激振频率接近或等于系 统固有频率时,系统产生谐振,不能正常工作。
还有电气驱动部件的谐振频率。
(4)摩擦 摩擦分为粘性摩擦、库仑摩擦和静摩擦。
实际机械导轨的摩擦特性随材料和表面状态的不同有很 大的不同。
(一)机械传动部件的功能要求及常用的传动部件
机械传动部件的传动类型、传动方式、传动刚性以及传 动可靠性对机电一体化系统的精度、稳定性和快速响应性有重 要影响。机电一体化系统设计时,需要选择传动间隙小、精度 高、体积小、重量轻、运动平稳、传递转矩大的传动部件。
机械传动系统与控制系统设计简介
二、肥皂压花机的传动路线及传动比的分配
肥皂压花机是在肥皂块上利用模具压制花纹和字样的自动机, 其机械传动系统的机构简图如图3.3.7所示。
27
精选ppt
(1)传动路线分析 具体传动路线如图3.3.8。
28
(2)传动比分配
若该机的工作条件为:电动机转速1450r/min,每分钟压制50 块肥皂,要求传动比误差为2。以下对上述方案进行传动比分配 并确定相关参数。
i 总 i 1 i 2 i 3 2 .5 3 .7 3 9 3 .0 9 5 2 8 .9 3 29
相对误差i为
ii总 i总2928.930.24%
i总
29
按传动比误差小于2%的要求,且各传动比均在常用范围之内, 故该传动链传动比分配方案可用。
精选ppt
2)辅助传动链
皂块送进和成品移位运动的工作频率应与模具往复运动频率相
14
精选ppt
(5)啮合器变速 啮合器分普通啮合器和同步啮合器两种,广泛应用于汽车、
叉车、挖掘机等行走机械的变速箱中。 啮合器一般都采用渐开线齿形,齿形参数可根据渐开线花键
国家标准选定。由于啮合套使用频繁,齿轮经常受冲击,齿端和 齿的工作面易磨损,因此,齿厚不宜太薄。为减小轴向尺寸,啮 合器的工作宽度均较小。
15
精选ppt
三、无级变速器
无级变速传动能根据工作需要连续平稳地改变传动速度。图 3.3.5为双变径轮带式无级变速传动的工作原理图 。
无级变速器有多种型式,许多型式已有标准产品,可参考产 品样本或有关设计手册选用。
16
精选ppt
第三节 机械传动系统方案设计
一、机械传动系统方案设计的过程和基本要求
21
精选ppt
机床课件第二章

➢ 复合成形运动:由两个或两个以上的旋转运动
或(和)直线运动,按照某种确定的运动关系组 合而成的独立的成形运动。
《金属切削机床》
例:车外圆
母线:圆,轨迹法。 需要1个简单成形 运动—工件旋转B1;
导线:直线,轨迹 法。需要1个简单成 形运动—车刀直线 平移A2。
按运动的功用分为: ➢ 表面成形运动(基本运动):机床上的刀具和工件,
为了直接形成被加工工件表面的运动。
形成母线和导线所需运动数之和,即为成形运动 的数目。 ➢ 非表面成形运动(辅助运动):机床上除成形运动 外,还需要辅助运动以实现机床的各种辅助动作 。
《金属切削机床》
一、表面成形运动
(一)简单成形运动、复合成形运动 按组成情况的不同,成形运动分为:
《金属切削机床》
展 成 运 动
《金属切削机床》
2、形成发生线的方法
(1)轨迹法:
利用刀具作一定 规律的轨迹运动 来对工件进行加 工的方法。
刀具:尖头车刀、刨刀。 切削刃与被加工表面为点接触(实际是短弧线)
形成发生线2需要一个成形运动 。
《金属切削机床》
(2)成形法:利用成形刀具对工件进行加工
的方法。
➢ 切削刃1与所需形成 的发生线2完全吻合
2 1
形成发生线 2不需要有成形运动
《金属切削机床》
(3)相切法:利用刀具边 旋转边作轨迹运动来对工 件进行加工的方法。
•刀具:铣刀、砂轮等旋 转加工刀具。 •垂直于刀具旋转轴线的 截面内,切削刃也可看 作是点, 当该切削点绕着 刀具轴 线作旋转运动, 刀具轴线沿着发生线的 等距线作轨迹运动
第2章 服机械常见机构及传动原理

第二章服机械常见机构及传动原理2.1有关机构的基本概念一、机器的特征:1、任何机器都是人为的实物组合体。
2、各构件之间具有确定的相对运动。
3、能完成能量的转换,做有用功。
注:机构的特征为第1、2点。
二、机构:具有确定相对运动的刚性体的组合系统。
(机械:在工程上,机器和机构的总称)三、(机构的)构件:机构中,参与运动的刚性体。
(一)构件与零件的区别:1、零件是指机器的制造单元,是单一的实物体。
2、构件是机器的运动单元,可以是一个零件,也可以是若干个零件组成的刚性体。
(二)构件与机构的区别:机构是由构件组成的,但是若干个构件并不一定都能组成机构(如三杆)。
(三)机构中的构件可分为三类:机架、原动件、从动件。
1、机架:机架是机构中视作固定不动的构件,它支承这其他可动构件。
在机构图中,机架上常标有斜线以示区别2、原动件:原动件是机构中接受外部给定运动规律的可动构件,原动件又称输入构件。
在机构图中,常标有箭头以示区别。
3、从动件:从动件是机构中岁原动件而运动的可动构件。
当从动件输出运动或实现其功能时,便称其为输出构件或执行件。
四、运动副的种类及代表符号(一)概述1、运动副:两构件相互接触而又保持一定相对运动的连接。
2、运动副的作用:用来约束构件的自由运动,即去除构件不需要的运动,而留下我们期望的运动。
3、运动副的理解:(1)运动副是一种连接;(2)运动副由两个机构组成;(3)组成运动副的两个构件之间有相对运动。
(二)运动副的分类1、按运动的范围分类:平面运动副和空间运动副。
(1)平面运动副:运动副只允许相邻两构件在同一平面或相对平行的平面内做相对运动。
(2)空间运动副:运动副允许相邻两构件的相对运动不只局限在平行的平面内。
2、按两构件的接触情况分类:低副和高副。
(1)低副:两构件通过面接触组成的运动副。
如转动副、移动副、球面副。
①转动副:只允许两构件相对转动的运动副。
若两构件之一是固定不动的,则称为固定铰链;若组成转动副的两构件都是运动的,则称为活动铰链。
机械的运动方案及机构的创新设计PPT课件
点
上受力较大
边形效应
速运动
用于运动传递 较差, 效率不高
开式 0.92~0.96
开式 0.5~0.7
平皮带 0.92~0.98 开式 0.9~0.93
在运动过程中效 随运动位置和 滑动 0.3~0.6
效 闭式 0.96 ~0.99
闭式 0.7~0.9
三角带 0.92~0.94 闭式 0.95~0.97 率随时发生变化 压力角不同 , 滚动 0.85~0.98
(5)能满足生产过程自动系统各种不同的特殊运行要求。 (6)缺点是直流电动机结构复杂,制造成本高,维护工作
量大。
11
伺服电机
在精密的机械设备中,如数控机床、机 器人等均采用伺服电动机作为原动机, 伺服电动机的机械特性曲线如图所示。
其最大的优点为:在非连续工作区可 n
以给出大的扭矩。
伺服电动机的反馈环节是光电码盘 来实现的。主要控制方式有位置反馈 和速度反馈两种形式。
15几种常用传动机构的基本特性齿轮机构蜗杆蜗轮机构带传动链传动连杆机构凸轮机构螺旋机构传动比准确外廓尺寸小交率高寿命长功率及速度范围广适宜于短距离传动传动比大可实现反向自锁用于空间交错轴传动动平稳中心距变化范围可用于长距离传动起到缓冲及过载保护作用中心距变化范围可用于长距离传动平均传动比准确特殊链可用于传送物料适用于宽广的载菏范围可实现不同的运动轨迹大或缩小行程等能实现各种运动规律机构紧凑可改变运动形制造精度要求高效率较低有打滑现象上受力较大有振动冲击边形效应设计复杂不宜高速运动易磨损主要用于运动传递滑动螺旋刚度较差效率不高开式092096闭式096099开式050704045平皮带092098三角带092094同步齿形带096098开式09093095097在运动过程中效率随时发生变化随运动位置和压力角不同效率亦不同滑动0306滚动085098级精度直齿v18ms级精度非直齿v36ms级精度直齿v200ms圆弧齿轮v100ms滑动速度1535ms三角带25kw同步齿形带50ms滚子链15ms齿形链30ms渐开线齿轮50000kw圆弧齿轮6000kw锥齿轮1000kw小于750kw常用为50kw三角带40kw同步齿形带200750kw最大可达3500kw通常为100kw10通常i开式i100常用i156060常用i1040平皮带10滚子链710齿形链主要用于传动主要用于传动常用于传动链的高速端常用于传动链中速度较低处既可做为传动机构又可做为执行机构主要用于执行机构主要用于转变运动形式为调整机构16基本机构的组合基本机构的组合大致可分为三种形式
机电传动控制机电传动系统的运动学基础解读
符合稳定运行条件的平衡点称为稳定平衡点。
分析举例
异步电动机 的机械特性
交点a
? a、b两点是
否为稳定平衡点
生产机械 的机械特 性
交点b
a点: TM ? TL ? 0
当负载突然增加后 TM ? TL' ? 0 TM' ? TL' ? 0
当负载波动消除后 TM' ? TL ? 0 TM ? TL ? 0
拖动转距,否则为制动转距。
2. TL的符号与性质
当TL的实际作用方向与n的方向相同时,取与n相反的符号; 当TL的实际作用方向与n的方向相反时,取与n相同的符号; 当TL的实际作用方向与n的方向相同(符号相反)时, TL为拖
动转距,否则为制动转距。
举例:如图所示电动机拖动重物上升和下降。
重物上升
TM为正 TL为正
dt
?0
即 dω ? 0 dt
传动系统以恒速运动。
TM =TL时传动系统 处于恒速运动的这种状 态被称为稳态。
2.动态( TM ? TL时):
TM ? TL时:
Td?0
即 d ? ? 0 , 加速运动。
dt
TM ? TL时: T d
?
J
d?
dt
? 0,
即 d ? ? 0 , 减速运动。
dt
TL─ 负载转矩(N.m);
? ─ 角速度(rad/s );
J ─ 转动惯量(kg.m 2);
t ─ 时间(s );
Td
?
J d?
dt
?
J 2? dn
60 dt
─ 动态转矩(N.m)。
三、传动系统的状态 根据运动方程式可知:运动系统有两种不同的运动状态:
大学课件-机电传动控制(完整)
1.5 对本课程学习的基本要求
1. 了解机电传动控制系统的组成和基本规律; 2. 掌握常用电机、电器、晶闸管的工作原理主要
特性,了解其应用与选用; 3. 掌握继电器-接触器的工作原理,学会用它们
来实现生产过程的自动控制; 4. 掌握常用的开环、闭环驱动控制系统的基本工
作原理和特点,了解性能和应用场所。 5. 学会分析机电传动控制系统的基本方法。
第二章 机电传动系统的动力学基础
• 2.1 机电传动系统的运动方程式 • 2.2 转矩、转动惯量和飞轮转矩的折算 • 2.3 生产机械的机械特性 • 2.4 机电传动系统稳定运行的条件
11
2.1 机电传动系统的运动方程式
n
2.同时满足二稳定平衡条件。
△n
30
第三章 直流电机的工作原理及特性
• 3.1 直流电机的基本结构和工作原理 • 3.3 直流电动机的机械特性 • 3.4 直流他励电动机的启动特性 • 3.5 直流他励电动机的调速特性 • 3.6 直流他励电动机的制动特性
31
定义: 机械能
直流发电机 直流电动机
25
1
(b)位能转矩
(因重力产生的转矩) (T的方向恒定与无关)
2.3 生产机械的特性
• 2.3.2 离心式通风机型机械特性 • 2.3.3 直线型机械特性 • 2.3.4 恒功率型机械特性
n
TL T0 Cn2
n TL Cn
n
TL K / n
0 T0
T
0
T
离心式通风机型机 直线型机械特性 械特性
解(1)
TL
TLL c M
第二章 机械传动系统的总体设计
第二章机械传动系统的总体设计机械传动系统的总体设计,主要包括分析和拟定传动方案、选择原动机、确定总传动比和分配各级传动比以及计算传动系统的运动和动力参数。
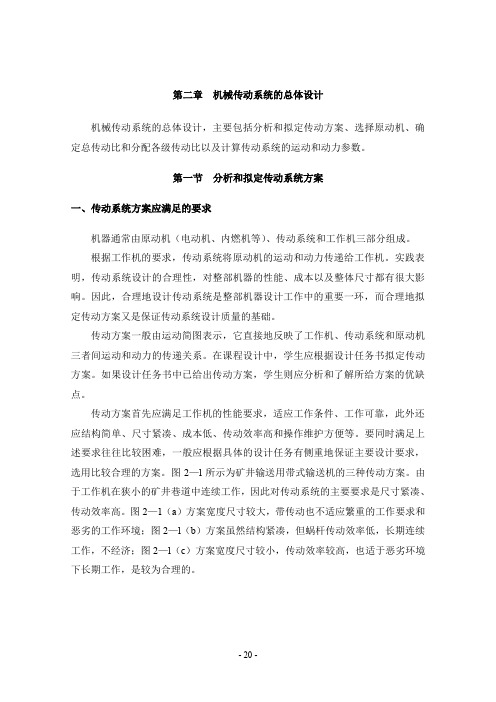
第一节分析和拟定传动系统方案一、传动系统方案应满足的要求机器通常由原动机(电动机、内燃机等)、传动系统和工作机三部分组成。
根据工作机的要求,传动系统将原动机的运动和动力传递给工作机。
实践表明,传动系统设计的合理性,对整部机器的性能、成本以及整体尺寸都有很大影响。
因此,合理地设计传动系统是整部机器设计工作中的重要一环,而合理地拟定传动方案又是保证传动系统设计质量的基础。
传动方案一般由运动简图表示,它直接地反映了工作机、传动系统和原动机三者间运动和动力的传递关系。
在课程设计中,学生应根据设计任务书拟定传动方案。
如果设计任务书中已给出传动方案,学生则应分析和了解所给方案的优缺点。
传动方案首先应满足工作机的性能要求,适应工作条件、工作可靠,此外还应结构简单、尺寸紧凑、成本低、传动效率高和操作维护方便等。
要同时满足上述要求往往比较困难,一般应根据具体的设计任务有侧重地保证主要设计要求,选用比较合理的方案。
图2—l所示为矿井输送用带式输送机的三种传动方案。
由于工作机在狭小的矿井巷道中连续工作,因此对传动系统的主要要求是尺寸紧凑、传动效率高。
图2—1(a)方案宽度尺寸较大,带传动也不适应繁重的工作要求和恶劣的工作环境;图2—l(b)方案虽然结构紧凑,但蜗杆传动效率低,长期连续工作,不经济;图2—l(c)方案宽度尺寸较小,传动效率较高,也适于恶劣环境下长期工作,是较为合理的。
图2—l 带式输送机传动方案比较二、拟定传动系统方案时的一般原则由上例方案分析可知,在选定原动机的条件下,根据工作机的工作条件拟定合理的传动方案,主要是合理地确定传动系统,即合理地确定传动机构的类型和多级传动中各传动机构的合理布置。
下面给出传动机构选型和各类传动机构布置及原动机选择的一般原则。
机械设计课程设计ppt课件精选全文

4.确定电动机型号
例:P0 = 5.471 kW
根据电动机功率和同步转速,选定 电动机型号为Y132M2-6。查表查表知 其有关参数:
额定功率 P 5.5kW 电动机满载转速 nm 960r/min
电动机轴伸出直径 D 38mm
电动机轴伸出长度 L 80mm
25
四、传动装置总传动比的确定和分配
注意:
1动.按机额工定作功机率所需Pm电计动算机。功率P0 计算,而不按电
2.设计轴时应按其输入功率计算、设计传动零 件时应按主动轴的输出功率计算
30
1.各轴转速
Ⅰ轴
n
nm i带
Ⅱ轴
nII=
n i1齿
Ⅲ轴
nⅢ
nII i2齿
Ⅳ轴(卷筒轴) nⅣ nⅢ
31
2.各轴输入功率
Ⅰ轴 PI P00 P0带 Ⅱ轴 PⅡ=PⅡ P轴承1齿轮 Ⅲ轴 PⅢ PⅡⅡⅢ PⅡ轴承2齿轮
12
题目4:搅拌机传动装置设计
6
4
3 5
1
2
1、搅拌机效率0.8,包括搅拌轮与轴承的效率损失;
2、一班制,双向运转,有中等冲击,每年工作300天,工
作寿命10年;
3、动力源为电力,三相交流,电压380V。
13
题目5:设计一型砂运输机用的减速装置。传动方案如下图所 示
鼓轮直径D
输出转矩T 输送带带速V
可以参考《机械设计》教科书的例题。
43
二、减速器内传动零件设计
1.圆柱齿轮传动
已知条件:所需传递的功率(或转矩); 主动轮转速和传动比;工作条件和尺寸限 制等。
设计内容:选择齿轮的材料及热处理 方式;确定齿轮传动的参数(中心距、齿数、 模数、齿宽等);设计齿轮的结构及其他几 何尺寸;作用在轴上力的大小和方向;验 算传动比。
《机械基础》第三版全部 ppt课件
2020/11/29
13
转动副
2020/11/29
14
移动副、螺旋副
2020/11/29
15
高副
2020/11/29
16
机械传动的分类
摩 摩擦轮传动
擦
带 平带传动
传
传 V带传动
动
动 圆带传动
机
啮 带传动— 同步带传动
械
齿 圆柱齿轮传动
传 动
合
轮 传 锥齿轮传动
动 齿轮齿条传动
传 蜗杆传动
螺旋传动
2020/11/29
12
运动副
定义:两个构件之间的可动连接。 低副:两个构件以面接触的运动副。
分转动副、移动副、螺旋副
高副:两个构件以点或线接触的运动副
比较
接触形式 压强 制造维修承载能力 效率 传递运动
低副 面 低 易
大
低 简单
高副 点、线 高 难
小
高 复杂
低副机构:机构中所有运动副均为低副;
高副机构:机构中至少有一个运动副为高副。
开口传动: 两轴平行,转向相同 交叉传动: 两轴平行,转向相反 半交叉传动:两轴空间交错 角传动: 两轴平面相交
2020/11/29
28
图1-9
2020/11/29
29
平带传动的主要参数
1、包角α:接触弧所对的圆心角。
α ↘ →∑F ↘ → α1≥150° 小带轮包角α1的计算: 开口传动 α1 =180 °-(D2-D1)/a*60 °
失效形式:打滑 (摩擦力矩<阻力矩) 放滑措施:增大摩擦力(正压力、摩擦因数) 2、传动比:瞬时输入速度与输出速度之比 i=n1/n2=D2/D1
第二章机电传动系统的动力学基础
第二章机电传动系统的动力学基础1. 引言在机械工程中,机电传动系统是指将电力或者其他形式的动力转化为机械运动的系统。
机电传动系统的设计与分析依赖于对动力学基础的理解。
本章将介绍机电传动系统的动力学基础,并探讨其在机械工程中的应用。
2. 动力学基础的概念2.1 动力学的基本概念动力学是研究物体在受力作用下运动规律的科学。
在机电传动系统中,动力学研究的重点是描述和分析物体受到力后的运动状态和运动规律。
2.2 机电传动系统的动力学模型机电传动系统可以用动力学模型来描述其运动规律。
动力学模型由四个基本要素组成:质点、力、力矩和功。
•质点:质点是物体的理想模型,具有质量但没有尺寸。
在机电传动系统中,质点被用来描述物体的运动状态。
•力:力是导致物体产生加速度的原因。
在机电传动系统中,力可以分为正向力和反向力,正向力使物体加速,而反向力使物体减速。
•力矩:力矩是力围绕某个轴产生转动的效果。
在机电传动系统中,力矩用来描述力对物体产生的转动效果。
•功:功是通过力对物体施加力学作用而产生的能量转移。
在机电传动系统中,功可以用来描述能量的转化和传递过程。
2.3 动力学基础的方程机电传动系统的动力学基础可以用一系列方程来描述。
其中,最基本的方程是牛顿第二定律和动能定理。
•牛顿第二定律:牛顿第二定律描述了力对物体产生加速度的关系。
其公式为 F = ma,其中 F 表示力,m 表示物体的质量,a 表示物体的加速度。
•动能定理:动能定理描述了物体的动能与力对其做功之间的关系。
其公式为 K = 1/2 * mv^2,其中 K 表示物体的动能,m 表示物体的质量,v 表示物体的速度。
3. 机电传动系统的应用机电传动系统的动力学基础在机械工程中有着广泛的应用。
下面列举了几个常见的应用场景:3.1 机械设计在机械设计中,动力学基础被用来分析和优化机械系统的运动性能。
通过对力、力矩和功的计算和分析,设计工程师可以确定合适的传动比例和功率需求,以实现理想的机械运动效果。
机械装备技术电子课件第二章
总之,机床的传动系统通常是由几个变速组串联
所组成的,其中以基本组为基础,再通过第一、第
二、……扩大组将各轴的转速级数和变速范围逐步扩
大。通常,将这样的传动系统称为常规传动系统。
常规传动系统的特点:
1)单公比的连续等比数列; 2)单速电机为动力源; 3)采用滑移齿轮或齿轮离合器变速; 4)没有采用公用齿轮。
二、 主传动链转速图的拟定
• 1.极限传动比、极限变速范围原则
最小传动比的限制 最大传动比的限制 直齿轮, 直齿轮变速组的极限变速范围 r=8. 螺旋圆柱齿轮变速组的极限变速范围 r=10. e.g. ① 公比φ=1.41
e.g. ② 18=31×36×23, 公比φ=1.26,。
•
2.传动顺序及传动副数原则
主轴转速为连续等公比数列时(即无转速的重复或空 缺),主轴转速的变速级数等于各变速组传动副数
的乘积。即:
Z=pa×pb×pc×pd×……pm
例:主轴转速为连续等公比数列,主轴转速级数Z =12。 a、b、c三个变速组的传动副数: pa=3、pb=2、pc=2。
主轴转速级数:Z=pa×pb×pc=3×2×2=12
转速线 传动线
标中,并把有关
转速之间的传动
比也画出来的一
种线图。 ⑵ 组成
传动轴线
转速点
⑶ 基本概念
1)变速组的级比和级比指数 级比 x-变速组中两相邻传动比的比值; 级比指数 x-转速图上两相邻传动线相距的格数。 2)基本组和扩大组 基本组 — x=1的变速组。 扩大组 — x>1的变速组。 扩大顺序 — 变速组按 x 值 由小到大依次排列的顺 序。 3)变速组的变速范围 基本组:
结构式:8=22×21×24
第一扩 大 组
机械原理完整ppt课件

微器等。
04 连杆机构与凸轮机构
连杆机构的基本形式和设计方法
连杆机构的基本形式
包括曲柄摇杆机构、双曲柄机构、双摇杆机构等,每种形式都有其特定的运动特 性和应用场合。
连杆机构的设计方法
根据给定的运动规律和设计要求,选择合适的连杆机构形式,并通过几何关系、 运动学分析和动力学计算等方法,确定机构的尺寸、运动参数和动力参数。
机械原理完整ppt课 件
目录
CONTENTS
• 机械原理概述 • 机构的结构分析与设计 • 机械传动与驱动 • 连杆机构与凸轮机构 • 间歇运动机构与组合机构 • 机械系统动力学与平衡 • 现代设计方法在机械原理中的应用
01 机械原理概述
机械原理的定义与重要性
定义
机械原理是研究机械系统运动、 力和能量转换规律的科学。
01
链传动应用
适用于机床、起重机械、农业机械等需要较大传动比和较高效率的场合
。
02
带传动应用
广泛应用于轻工、纺织、化工等行业的传动系统中,如缝纫机、皮带运
输机等。
03
螺旋传动应用
常用于机床进给机构、千斤顶、螺旋压力机等需要直线运动或升降运动
的场合。同时,在精密仪器和微调装置中也有广泛应用,如精密螺旋测
中的重要性。
优化设计的数学模型
02
讲解优化设计的数学模型,包括设计变量、目标函数和约束条
件等要素的定义和表示方法。
优化算法与实例分析
03
介绍常用的优化算法,如梯度下降法、遗传算法等,并通过实
例分析展示如何在机械设计中应用这些算法进行优化。
可靠性设计在机械原理中的应用
可靠性设计的基本概念
介绍可靠性设计的定义、目的和意义,阐述可靠性设计在机械设计中的重要性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋 副
2
1
运
1
动 副
球 面
1
副
球
销
2
副
2 1
2 1
1
2
2 1
2 1
1 2
1 2
1 2
2 1
第二章 机械传动系统的运动分析
一般构件的表示方法
杆、轴构件
固定构件
同一构件
第二章 机械传动系统的运动分析
一般构件的表示方法
两副构件
三副构件
第二章 机械传动系统的运动分析
机构示意图——只反映机构组成情况及其运动的 传递方式,不要求严格地按比例绘制的运动简图。
第二章 机械传动系统的运动分析
第一节 机构的组成及运动简图
一、构件的运动及运动副 二、运动链与机构 三、平面机构运动简图
第二章 机械传动系统的运动分析
平面机构——所有构件都在同一平面或相互 平行的平面内运动的机构。 本章主要讨论平面机构(工程中常见)。
一、构件的运动及运动副
(一)构件的运动形式 1.构件的平动(或移动) 构件作平动(或移动)时,其上任一条直线 始终与初始位置保持平行。
一个作平面运动的自由构件S 可有三个独立运动,
即:
沿x轴方向的移动; 沿y轴方向的移动;
绕任意点A的转动。
可见,一个作平面运动的自由构件有三个自由度。
第二章 机械传动系统的运动分析
运动副——两构件直接接触并能产生确定相对 运动的联接。
约束——对构件独立运动的限制。
作平面运动的构件,其约束不能超过2个,否 则就不可能产生相对运动。
第二章 机械传动系统的运动分析
第二章 机械传动系统的运动分析
第一节 机构的组成及运动简图 第二节 机械传动机构 第三节 平面机构具有确定运动的条件 第四节 传动机构运动方案分析实例
第二章 机械传动系统的运动分析
机械传动系统运动分析的目的:
通过分析机构运动的可能性及其具有确定运动 的条件,了解常用机构及其传动系统的运动特性、 传动形式及基本功用。
③ 选择绘制简图的视图平面;测量各运动副相对 位置的实际尺寸。 ④ 选择合适的比例尺,按比例定出各运动副的相 对位置;用规定符号绘制出构件和运动副;并以 箭头表示原动件的运动方向。
常用的比例尺为: l 实图际示长 (长 m(度 m m 或 度 mm))
第二章 机械传动系统的运动分析
【例2-1】 绘制卡车翻斗自动卸料机构的运动简图。
活塞与气缸
滑板与导轨
第二章 机械传动系统的运动分析
2.高副 ——两构件以点或线接触构成的运动副。
第二章 机械传动系统的运动分析
组成平面高副的两构件可沿接触点切线tt方向 的相对移动和绕接触点A的相对转动。
车轮与钢轨
凸轮与顶杆
两轮齿啮合
第二章 机械传动系统的运动分析
平面运动副——两构件在同一平面内作相对运动 构成的运动副。
应用:随着生产线中机械手 和机器人的应用日趋普遍, 开式运动链也逐渐增多。
第二章 机械传动系统的运动分析
2.机构
——固定某一构件,并让另一个(或几个) 构件按给定运动规律相对于固定构件运动,其 余构件能随之作确定相对运动的运动链。
机架——机构中固定的构件。
原动件(或主动件)——机构中按给定运动规律 作独立运动的构件。
第二章 机械传动系统的运动分析
实例: 内燃机气缸中活塞的运动:直线平动 摆式送料机料槽的运动:曲线平动
活塞的平动
料槽的平动
第二章 机械传动系统的运动分析
工程实例:
内燃机推杆和气门
车轮联动机构中连杆
构件平动时的特征:
① 其上各点的轨迹形状相同; ② 在同一瞬时其上各点的速度和加速度相同。
第二章 机械传动系统的运动分析
2
1
2 1
此动画不动?
第二章 机械传动系统的运动分析
运动副的表示方法
运动副符号 两运动构件构成的运动副 两构件之一为固定时的运动副
转 动 平副 面 运 动 副移 动 副
22
1
1
2
1 2 1
2
2
1
1
2
1 2 1
22
22
1
1
1
1
2
2
1 2 1
1 2
1
第二章 机械传动系统的运动分析
平
面
2
高
副
1
2
螺
空 间
例如: 单缸四冲程内燃机
单缸四冲程内燃机示意图
第二章 机械传动系统的运动分析
例如: 牛头刨床
牛头刨床示意图
第二章 机械传动系统的运动分析
常用机构示意图符号
第二章 机械传动系统的运动分析
绘制机构运动简图的一般步骤为:
① 分析机构的组成和运动。确定机架、原动件和 从动件。 ② 从原动件开始,沿运动传递路线,确定运动副 的类型和数目。
按两构件的接触情况,运动副分为:低副和高副。
第二章 机械传动系统的运动分析
1.低副
此动画不动?
——两构件以面接触构成的运动副。
(1)转动副
构成转动副的两构件只能绕某一轴线 作相对运动。
铰链——由圆柱销和销孔构成的转动副。
轴与轴承
圆柱销与销孔
第二章 机械传动系统的运动分析
(2)移动副 构成移动副的两构件只能沿一个方向作相对移动。
空间运动副——空间运动。
螺旋副
球副
应用:球铰链、拉杆天线、螺旋、生物关节等。
第二章 机械传动系统的运动分析
二、运动链与机构
1.运动链 ——两个或两个以上的构件通过运动副联接而
成的系统。
闭式运动链——各构件构成首末封闭的系统。 应用:传统的机械中多采用闭式运动链。
开式运动链——各构件未 构成首末封闭的系统。
第二章 机械传动系统的运动分析
3.构件的平面运动 构件作平面运动时,其上任一点始终在某一平面
内运动。 实例: 车辆的车轮沿直线轨道的滚动。 内燃机连杆的运动。
车轮的平面运动 活塞的平动
平动和定轴转动是平面运动的特殊情形。平面 运动可视作平动和转动的合成。
第二章 机械传动系统的运动分析
(二)运动副及其分类 构件的自由度——构件所具有的独立运动数目。
从动件——机构中随原动件而运动的构件。
可见,机构是由机架系统。
第二章 机械传动系统的运动分析
三、平面机构运动简图
——用简单的线条和符号来表示构件和运动副, 并按一定比例确定各运动副的相对位置,以表示机 构中各构件间相对运动关系的简化图形。
第二章 机械传动系统的运动分析
2.构件的定轴转动 构件作转动时,其上(或其延伸部分)有唯一
的一条直线固定不动。 转轴——构件转动时,其上固定不动的直线。 例如:齿轮、凸轮、带轮、电机转子、机床主轴等。
齿轮
飞轮
第二章 机械传动系统的运动分析
构件定轴转动时的特征: 除转轴上的点不动外,其余各点都在垂直于转
轴的平面内作圆周运动; 圆心在转轴上,圆周的半径为点到转轴的距离。