数学建模竞赛基于多雷达目标定位的数学模型
2023研究生数学建模竞赛d题

2023研究生数学建模竞赛d题摘要:一、引言1.2023年研究生数学建模竞赛背景2.题目D的概述二、题目D详细解析1.题目要求2.题目特点3.解题思路三、解题步骤1.数据收集与处理1.1 数据来源1.2 数据清洗1.3 数据预处理2.建立数学模型2.1 确定模型类型2.2 参数估计2.3 模型检验3.模型求解与优化3.1 求解方法3.2 结果分析3.3 模型优化4.模型应用与验证4.1 应用场景选择4.2 结果对比与分析4.3 模型验证四、结果与分析1.模型预测结果2.模型性能评估3.结果可靠性分析五、总结与展望1.题目D解决的意义2.不足与改进3.未来研究方向正文:随着科技的发展和数学应用的广泛性,数学建模竞赛越来越受到研究生的关注。
2023年研究生数学建模竞赛中,题目D引起了广大参赛者的兴趣。
本文将详细解析题目D,并给出解题思路和步骤,以期为大家提供实用的参考。
一、引言2023年研究生数学建模竞赛共有多个题目供参赛者选择,其中题目D以其实用性和挑战性吸引了众多选手。
题目D的概述如下:“某城市交通部门拟对市区范围内的交通流量进行监测与调控,以减轻拥堵现象。
现有历史数据表明,交通流量与时间、地点等因素有关。
请建立一个数学模型,预测未来某一时间段内的交通流量,并针对实际情况提出合理的调控策略。
”二、题目D详细解析1.题目要求题目D主要分为两部分:一是建立数学模型预测交通流量,二是提出合理的调控策略。
这就要求选手具备较强的数据分析能力和数学建模技能。
2.题目特点题目D的特点在于数据的真实性和复杂性。
选手需要处理大量的实时数据,考虑多种因素对交通流量的影響,如时间、地点、天气等。
此外,调控策略的提出需要结合实际交通状况,具有一定的挑战性。
3.解题思路针对题目D,我们可以采取以下步骤:(1)数据收集与处理:收集历史时间段内的交通数据,包括时间、地点、交通流量等信息。
对数据进行清洗、预处理,以便后续分析。
2014研究生数学建模B题优秀论文
三 符号说明
r
r
k
目标径向距离 目标方位角 目标俯仰角 雷达极坐标下测距误 差 雷达极坐标下方位角 误差 雷达极坐标下俯仰角 误差 雷达在地球直角坐标 下 x 轴上的标准差 雷达在地球直角坐标 下 y 轴上的标准差 雷达在地球直角坐标 下 z 轴上的标准差 目标的运动状态
-3-
一 问题重述
目标跟踪是指根据雷达等传感器所获得的对目标的测量信息, 连续地对目标 的运动状态进行估计,进而获取目标的运动态势及意图。目标机动则是指目标的 速度大小和方向在短时间内发生变化,通常采用加速度作为衡量指标。目标跟踪 与目标机动是“矛”与“盾”的关系。因此,引入了目标机动时雷达如何准确跟踪的 问题。 机动目标跟踪的难点在于以下几个方面:(1) 描述目标运动的模型,即目标 的状态方程难于准确建立。通常情况下跟踪的目标都是非合作目标,目标的速度 大小和方向如何变化难于准确描述; (2) 传感器自身测量精度有限加之外界干 扰,传感器获得的测量信息,如距离、角度等包含一定的随机误差,用于描述传 感器获得测量信息能力的测量方程难于完全准确反映真实目标的运动特征; (3) 当存在多个机动目标时,除了要解决(1)、(2)两个问题外,还需要解决测量信息 属于哪个目标的问题,即数据关联。由于以上多个挑战因素以及目标机动在战术 上主动的优势,机动目标跟踪已成为近年来跟踪理论研究的热点和难点[1]。 目标跟踪处理流程通常可分为航迹起始、点迹航迹关联(数据关联)、航迹 滤波等步骤。 另外, 不同类型目标的机动能力不同。 因此, 在对机动目标跟踪时, [2] 必须根据不同的目标类型选择相应的跟踪模型 。 根据题目提供的 3 组机动目标测量数据,本文拟解决以下问题: 问题一 根据附件中的 Data1.txt 数据,分析目标机动发生的时间范围,并 统计目标加速度的大小和方向。建立对该目标的跟踪模型,并利用多个雷达的 测量数据估计出目标的航迹。鼓励在线跟踪。 问题二 附件中的 Data2.txt 数据对应两个目标的实际检飞考核的飞行包线 (检飞:军队根据国家军标规则设定特定的飞行路线用于考核雷达的各项性能 指标,因此包线是有实战意义的)。请完成各目标的数据关联,形成相应的航 迹,并阐明你们所采用或制定的准则(鼓励创新)。如果用序贯实时的方法实 现更具有意义。若出现雷达一段时间只有一个回波点迹的状况,怎样使得航迹 不丢失?请给出处理结果。 问题三 根据附件中 Data3.txt 的数据,分析空间目标的机动变化规律(目标 加速度随时间变化)。若采用第 1 问的跟踪模型进行处理,结果会有哪些变化? 问题四 请对第 3 问的目标轨迹进行实时预测,估计该目标的着落点的坐 标,给出详细结果,并分析算法复杂度。 问题五 Data2.txt 数据中的两个目标已被雷达锁定跟踪。 在目标能够及时了 解是否被跟踪,并已知雷达的测量精度为雷达波束宽度为 3° ,即在以雷达为锥 顶,雷达与目标连线为轴,半顶角为 1.5° 的圆锥内的目标均能被探测到;雷达 前后两次扫描时间间隔最小为 0.5s。为应对你们的跟踪模型,目标应该采用怎 样的有利于逃逸的策略与方案?反之为了保持对目标的跟踪,跟踪策略又应该 如何相应地变换?
研究生数学建模竞赛机动目标的跟踪与反跟踪定稿版

精编WORD版IBM system office room [ A0816H-A0912AAAHH-GX8Q8-GNTHHJ8 】参赛密码参赛密码(由组委会填写)第十一届华为杯全国研究生数学建模竞赛题目机动目标的跟踪与反跟踪摘要:目标跟踪理论在军事、民用领域都有重要的应用价值。
本文对机动目标的跟踪与反跟踪相关问题进行了研究,取得了以下几方面的成果。
1.建立了对机动目标的跟踪模型通过对原始数据进行处理,观察到目标运动模式大致为机动与非机动的混合模式,于是决定先采用基于卡尔曼滤波的多模滤波VD算法来建立跟踪模型。
当目标处于机动状态时采用普通卡尔曼滤波进行处理,机动模式采用非线性卡尔曼滤波处理。
滤波出来的航迹图和拟合岀来的航迹匹配很好。
然后利用Matlab的拟合工具cFzl对目标的各个轴向的运动进行了拟合,分析出了目标的运动方式,大致估计岀了目标的航迹。
对建立的航迹方程进行预测,成功的估计岀了目标的着落点。
2.实现了转换坐标卡尔曼滤波器实际情况下目标的状态往往是在极坐标或者球坐标情况下描述的。
状态方程和量测方程不可能同时为线性方程,本文把极坐标系下的测量宣经坐标转换到直角坐标系中,用统计方法求岀转换后的测量值误差的均值和方差,然后利用标准卡尔曼滤波器进行滤波,精度较髙。
3.完成了多目标的数据关联,区分出了相应的轨迹4.以最近邻法原理为基础,采用线性预估与距离比较的方法制定出了相应的区分规则,成功的将原始数据的两个目标轨迹区分出来。
5.分析各个目标的机动变化规律并成功识别了机动发生的时间利用得到的目标运动轨迹,对位置信息进行二次求导得岀了目标的加速度变化曲线,分析三个平面上的加速度变化趋势得到了目标在空间的机动情况,当位置与速度变化剧烈的时候也是机动发生的时候,于是通过对加速度随时间变化的分析,合理的设定加速度变化率的门限,当加速度变化率超过门限即认为目标处于机动状态并通过程序算法对机动点进行标记,结果和对目标的经验判断相符合。
机动目标的追踪与反追踪的模型完整版

(由组委会填写)第十一届华为杯全国研究生数学建模竞赛学校大连理工大学参赛队号10141005队员姓名1.鲁欢2.候会敏3.程帅兵(由组委会填写)第十一届华为杯全国研究生数学建模竞赛题目机动目标的跟踪与反跟踪模型的建立及求解摘要:本文主要对机动目标追踪与反追踪模型的建立及求解问题进行了相关计算,讨论结果大致如下:问题一,根据附件中的数据,利用数值法求解各个时刻点处的加速度,挑出加速度数量较大的时刻,并绘出矩形图,以加速度持续较大的时刻点为机动时间范围,并进行统计其大小以及方向,追踪模型则是依据现时刻以及前一时刻估计出的的物理量如位置速度加速度等,并根据数据统计出目标的机动能力即两时刻加速度最大该变量作为下一时刻的加速度,来计算在这种极限状态下目标向四周逃离的最远边界,因而形成一个区域,其中心即为雷达天线下时刻所指方向。
航迹计算将三雷达测得的数据转换到同一坐标系中在进行拟合得到。
问题二,首先进行了航迹起始的确定。
采用联合概率数据关联(JPDA)算法,通过对确认矩阵拆分得到互联事件及互联矩阵,计算互联事件的概率来进行数据关联,然后按照确定航迹。
为避免雷达对于仅有一个回波信号的失跟情况,采取调动多种检测手段对目标密切关注,并改进雷达的内部控制计算算法。
问题三,我们建立了微分方程模型。
着重分析了在空间范围内的机动目标的切向加速度以及方向加速度随时间的变化规律。
通过运用Excel进行数据的处理计算得出切向加速度以及法向加速度的数值,利用Matlab编程得出其变化规律的轨迹图像。
再结合问题一中的追踪模型,得到在数据3情况下的变化规律。
通过对比,得出模型一的结论应用于问题三,其结果产生较大的偏差。
问题四,我们建立了卡尔曼滤波预测模型。
利用卡尔曼滤波对机动目标进行预测,经过多次循环得出200对的位置坐标,利用Matlab软件给出了模拟后的卡尔曼滤波波形图。
再进行对坐标的空间及时间复杂度进行分析,得出最终的结论。
问题五,目标在距雷达较远时,沿轴线方向逃离不论是靠近抑或远离都是无关痛痒的,因而需向圆锥底面的径向逃逸,目标不知雷达在何方因而水平方向逃离有些误撞意味,所以最好的逃离策略是上下飞行,靠近地面时屏障较多,会对雷达跟踪产生干扰,因此最好的方案是做俯冲动作,降低飞行高度。
2009年全国研究生数学建模竞赛C题
2009年全国研究生数学建模竞赛C题多传感器数据融合与航迹预测未来的战争,将是陆、海、空相结合的立体战争, 成功地收集各种情报非常重要,甚至对战争的胜负起着决定性的作用。
在实战中各种情报的收集依赖于多种传感器设备,由于,1.电磁环境将异常复杂,敌方会主动或随机发送错误、无用的信号使我方传感器受到各种欺骗和干扰;2.需要检测目标的数量越来越多,运动速度也越来越快;3.多数目标会利用散射或吸收的方法大大减少对电磁波的反射等隐身技术和低空、超低空突防技术,让目标的反射电磁波和地面所反射电磁波混在一起,无法区分;总之使传感器难以捕捉和跟踪检测目标。
因此,采用单传感器捕捉和跟踪的技术效果很差,而多传感器数据融合在解决探测、跟踪和识别方面不仅具有能够数倍地扩大捕捉和跟踪空间和时间覆盖范围的优势,还可以降低信息模糊度、提高可信度和改进探测性能等等。
故采用并不断发展多传感器数据融合技术将是军事电子领域一种趋势。
多传感器数据融合可以分为数据预处理、航迹相关、航迹融合等步骤。
如果某个时刻某雷达站接受到空间某点反射回来的电磁波,它将记录下有关的数据,并进行计算,得到包括目标的经度、纬度、海拔高度,经向速度、纬向速度、观察时刻在内的一组数据(见附件数据)。
然后雷达网中各个雷达站将各自的观测数据传送并存放到融合中心进行雷达数据相关和数据融合。
为了正确区分来自不同雷达站的数据,在每组雷达数据之前再加上雷达站编号和传感器编号等。
航迹即上述某雷达站接受到某一检测目标陆续反射回来的电磁波后记录、计算检测目标所处的一系列空中位置而形成的离散点列,航迹相关即依据一定的准则确定各个雷达站的多组数据中哪些组数据是来自同一个检测目标。
由于每组数据的观测时刻和各个雷达站的观测时间间隔都不同,所以在进行航迹两两相关之前首先要进行时间配准,即让不同雷达表示同一目标位置的时刻集合扩大为一致。
然后将多条表示同一目标运动轨迹的航迹尽可能地抽取出来,为数据融合做好准备。
全国研究生数学建模竞赛题目

中国研究生数学建模竞赛试题汇总2021赛题汇总2021-A:相关矩阵组的低复杂度计算和存储建模2021-B:空气质量预报二次建模2021-C:帕金森病的脑深部电刺激治疗建模研究2021-D:抗乳腺癌候选药物的优化建模2021-E:信号干扰下的超宽带(UWB)精确定位问题2021-F:航空公司机组优化排班问题2020赛题汇总2020-A:芯片相噪算法2020-B:汽油辛烷值建模2020-C:面向康复工程的脑信号分析和判别建模2020-D:无人机集群协同对抗2020-E:能见度估计与预测2020-F:飞行器质心平衡供油策略优化2019赛题汇总2019-A: 无线智能传播模型2019-B:天文导航中的星图识别2019-C:视觉情报信息分析2019-D:汽车行驶工况构建2019-E:全球变暖?2019-F:多约束条件下智能飞行器航迹快速规划2018赛题汇总2018-A :关于跳台跳水体型系数设置的建模分析2018-B:光传送网建模与价值评估2018-C:对恐怖袭击事件记录数据的量化分析2018-D:基于卫星高度计海面高度异常资料获取潮汐调和常数方法及应用2018-E:多无人机对组网雷达的协同干扰2018-F:机场新增卫星厅对中转旅客影响的评估方法2017赛题汇总2017-A:无人机在抢险救灾中的优化运用2017-B:面向下一代光通信的VCSEL激光器仿真模型(华为命题)2017-C:航班恢复问题2017-D:基于监控视频的前景目标提取2017-E:多波次导弹发射中的规划问题2017-F:构建地下物流系统网络2016赛题汇总2016-A:多无人机协同任务规划2016-B:具有遗传性疾病和性状的遗传位点分析2016-C:基于无线通信基站的室内三维定位问题2016-D:军事行动避空侦察的时机和路线选择2016-E:粮食最低收购价政策问题研究2015赛题汇总2015-A:水面舰艇编队防空和信息化战争评估模型2015-B:数据的多流形结构分析2015-C:移动通信中的无线信道“指纹”特征建模2015-D:面向节能的单/多列车优化决策问题2015-E:数控加工刀具运动的优化控制2015-F:旅游路线规划问题2014赛题汇总2014-A:小鼠视觉感受区电位信号(LFP)与视觉刺激之间的关系研究2014-B:机动目标的跟踪与反跟踪2014-C:无线通信中的快时变信道建模2014-D:人体营养健康角度的中国果蔬发展战略研究2014-E:乘用车物流运输计划问题2013赛题汇总2013-A:变循环发动机部件法建模及优化2013-B:功率放大器非线性特性及预失真建模2013-C:微蜂窝环境中无线接收信号的特性分析2013-D:空气中PM2.5问题的研究2013-E:中等收入定位与人口度量模型研究2013-F:可持续的中国城乡居民养老保险体系的数学模型研究2012赛题汇总2012-A:基因识别问题及其算法实现2012-B:基于卫星无源探测的空间飞行器主动段轨道估计与误差分析2012-C:有杆抽油系统的数学建模及诊断2012-D:基于卫星云图的风矢场(云导风)度量模型与算法探讨2011赛题汇总2011-A:基于光的波粒二象性一种猜想的数学仿真2011-B:吸波材料与微波暗室问题的数学建模2011-C:小麦发育后期茎秆抗倒性的数学模型2011-D:房地产行业的数学建模2010赛题汇总2010-A:确定肿瘤的重要基因信息2010-B:与封堵溃口有关的重物落水后运动过程的数学建模2010-C:神经元的形态分类和识别2010-D:特殊工件磨削加工的数学建模2009赛题汇总2009-A:我国就业人数或城镇登记失业率的数学建模2009-B:枪弹头痕迹自动比对方法的研究2009-C:多传感器数据融合与航迹预测2009-D:110警车配置及巡逻方案2008赛题汇总2008-A:汶川地震中唐家山堰塞湖泄洪问题2008-B:城市道路交通信号实时控制问题2008-C:货运列车的编组调度问题2008-D:中央空调系统节能设计问题2007赛题汇总2007-A:建立食品卫生安全保障体系数学模型及改进模型的若干理论问题2007-B:机械臂运动路径设计问题2007-C:探讨提高高速公路路面质量的改进方案2007-D:邮政运输网络中的邮路规划和邮车调度2006赛题汇总2006-A:Ad Hoc网络中的区域划分和资源分配问题2006-B:确定高精度参数问题2006-C:维修线性流量阀时的内筒设计问题2006-D:学生面试问题2005赛题汇总2005-A:Highway Traveling time Estimate and Optimal Routing 2005-B:空中加油2005-C:城市交通管理中的出租车规划2005-D:仓库容量有限条件下的随机存贮管理2004赛题汇总2004A:发现黄球并定位2004B:实用下料问题2004C:售后服务数据的运用2004D:研究生录取问题。
2023 年数学建模国赛b 题 多波束测线问题思路

2023年数学建模国赛B题是关于多波束测线问题。
这是一个非常具有挑战性的题目,需要我们思考和解决。
在本文中,我将从简到繁,从浅入深地探讨这个问题,并提供我个人的观点和理解。
希望通过本文的阅读,你能对这个题目有一个更深入的理解。
一、问题背景多波束测线问题是指在测绘建筑物或场地轮廓时,利用多个发射波束接收返回信号以获取目标轮廓的方法。
而2023年数学建模国赛B题的多波束测线问题则是要求我们通过建立数学模型,从已知点向目标区域内发射波束,测量波束的回波信息,然后根据这些信息计算出目标区域的轮廓。
二、问题分析1. 波束的发射与接收我们需要考虑如何进行波束的发射和接收。
在实际测量中,波束可以由雷达、激光仪等设备发射,然后通过接收设备收集返回的信息。
我们需要建立一套模型来描述波束的发射与接收过程,包括波束的参数、发射源和接收点的位置等。
2. 回波信息的处理接收到的回波信息包含了目标区域内的散射点的位置和强度等信息。
我们需要分析这些信息,找出与目标轮廓有关的数据,并进行数据处理和分析,以便后续的计算和模型建立。
3. 轮廓的计算我们需要根据接收到的回波信息,计算出目标区域的轮廓。
这一部分涉及到数学建模、数据处理和算法设计等内容,需要我们综合运用数学知识和计算机技术来解决。
三、可能的解决方案针对2023年数学建模国赛B题的多波束测线问题,可能的解决方案包括但不限于以下几个方面:1. 建立数学模型,描述波束的发射与接收过程,包括波束的参数、发射源和接收点的位置等。
2. 开发数据处理和分析的方法,提取目标轮廓相关的信息,并对数据进行处理和筛选。
3. 设计计算和模拟算法,根据接收到的回波信息计算出目标区域的轮廓,得出最终的结果。
四、个人观点和理解从我个人的角度来看,2023年数学建模国赛B题的多波束测线问题需要综合运用数学、物理、计算机等各方面的知识和技能来解决。
这是一个非常有挑战性的题目,但同时也是一个很有趣的问题,可以锻炼我们的综合能力和创新思维。
研究生数学建模-历年题目-竞赛B题-

2014年全国研究生数学建模竞赛B题机动目标的跟踪与反跟踪目标跟踪是指根据传感器(如雷达等)所获得的对目标的测量信息,连续地对目标的运动状态进行估计,进而获取目标的运动态势及意图。
目标跟踪理论在军、民用领域都有重要的应用价值。
在军用领域,目标跟踪是情报搜集、战场监视、火力控制、态势估计和威胁评估的基础;在民用领域,目标跟踪被广泛应用于空中交通管制,目标导航以及机器人的道路规划等行业。
目标机动是指目标的速度大小和方向在短时间内发生变化,通常采用加速度作为衡量指标。
目标机动与目标跟踪是“矛”与“盾”的关系。
随着估计理论的日趋成熟及平台能力提升,目标作常规的匀速或者匀加速直线运动时的跟踪问题已经得到很好的解决。
但被跟踪目标为了提高自身的生存能力,通常在被雷达锁定情况下会作规避的机动动作或者释放干扰力图摆脱跟踪,前者主要通过自身运动状态的快速变化导致雷达跟踪器精度变差甚至丢失跟踪目标,后者则通过制造假目标掩护自身,因此引入了在目标进行机动时雷达如何准确跟踪的问题。
机动目标跟踪的难点在于以下几个方面:(1) 描述目标运动的模型[1,2]即目标的状态方程难于准确建立。
通常情况下跟踪的目标都是非合作目标,目标的速度大小和方向如何变化难于准确描述;(2) 传感器自身测量精度有限加之外界干扰,传感器获得的测量信息[3]如距离、角度等包含一定的随机误差,用于描述传感器获得测量信息能力的测量方程难于完全准确反映真实目标的运动特征;(3) 当存在多个机动目标时,除了要解决(1)、(2)两个问题外,还需要解决测量信息属于哪个目标的问题,即数据关联。
在一定的测量精度下,目标之间难于分辨,甚至当两个目标距离很近的时候,传感器往往只能获得一个目标的测量信息。
由于以上多个挑战因素以及目标机动在战术上主动的优势,机动目标跟踪已成为近年来跟踪理论研究的热点和难点。
不同类型目标的机动能力不同。
通常情况下战斗机的飞行速度在100~400m/s,机动半径在1km以上,机动大小一般在10个g以内,而导弹目标机动,加速度最大可达到几十个g,因此在对机动目标跟踪时,必须根据不同的目标类型选择相应的跟踪模型。
数学建模无人机飞行航迹正文
目录一.问题重述....................................... 错误!未定义书签。
二.问题的假设与符号说明 (1)1.合理假设 (1)2.符号说明 (2)三.问题的分析 (2)四.模型的建立与求解 (3)1问题一 (3)(一)威胁建模 (3)(二)模型求解 (4)(三)雷达威胁目标隶属度计算 (6)(四)航迹算法的规划 (7)2.问题二 (11)(一)问题求解 (11)A算法进行分析 (14)(二)基于三维空间的*3. 问题三 (17)(一)模型的可行性分析 (18)(二)模型及算法的仿真分析 (19)(三)模型的优缺点…………………………………………………………错误!未定义书签。
20五参考文献 (21)一、问题的重述众所周知自主飞行的能力是无人驾驶飞机所必须具有的。
如果要实现无人驾驶飞机的自主飞行,则要求具有相当程度的飞行航迹规划能力。
无人机的航迹规划是为了圆满完成任务而作的计划。
它往往指单机在初始位置、终止位置和一些目标任务结点确定之后的航迹规划问题,其基本功能是根据无人机的性能和飞经的地理环境、威胁环境等因素,对已知的目标规划提出满足要求的航迹,以便在实际飞行时可以根据需要进行实时局部修改。
现在我们讨论如下的情况:假定无人机的活动范围为20km×20km的区域,无人机起点的平面坐标为[1,2](单位:km), 攻击目标的平面坐标为[19,18](单位:km),同时不考虑无人机起飞降落时的限制。
数字地图和敌方威胁情况(主要考虑雷达威胁)已在附件中给出。
数字地图可以做适当的简化,比如可以把地形近似分为三种:高地,低地以及过渡地带。
问题1:忽略地形和无人机操作性能等因素的影响,综合考虑敌方威胁,无人机航程等,基于二维平面建立单机单目标的航迹规划模型。
问题2:把模型扩展到三维空间,并同时考虑无人机的操作性能(主要考虑拐弯)和地形因素。
问题3:试讨论和分析你提出的模型的可行性,并做仿真分析。
基于稀疏表示的频控阵 MIMO 雷达多目标定位
基于稀疏表示的频控阵 MIMO 雷达多目标定位陈慧;邵怀宗;潘晔;王文钦【摘要】针对频控阵多输入多输出(MIMO)雷达,提出了一种基于压缩感知稀疏表示思想的目标定位算法。
首先回顾了 MIMO 雷达和频控阵的特点,进而研究了频控阵 MIMO 雷达的性质,它不但可以具有MIMO 雷达的优点,而且能够感知目标的距离维信息,同时针对频控阵 MIMO 雷达接收数据模型进行数学建模,并把目标定位问题表示成稀疏表示框架下的代价函数。
最后利用凸优化工具对代价函数进行优化求解,由所得稀疏权向量中的非零元素索引映射出目标的方位和距离信息。
与现有的经典 MUSIC 算法相比,具有更好的定位性能,计算机仿真结果证明了所提算法的有效性。
%For the frequency diverse array(FDA)multiple-input and multiple-output(MIMO)radar,a target localization algorithm in sparse signal representation perspective is presented.Firstly,the characters of the MIMO radar and FDA are reviewed,then the properties of the FDA MIMO radar are studied,that is,it not only owns the merits of the MIMO radar,but also can sense the range information of the targets.Its re-ceiving mathematical measurement is also modeled,and the target localization problem is described as a cost function under the sparse representation framework.Finally,the angle and the range of the targets are esti-mated by mapping the non-zero element indexes of the sparse vector which is obtained by solving the cost function using existing convex pared with the existing classic MUSIC algorithm,the proposed algo-rithm can achieve better localization performance.The computer simulation results demonstrate the effective-ness of the algorithm.【期刊名称】《雷达科学与技术》【年(卷),期】2015(000)003【总页数】6页(P259-264)【关键词】频控阵 MIMO 雷达;压缩感知;稀疏表示;参数估计【作者】陈慧;邵怀宗;潘晔;王文钦【作者单位】电子科技大学通信与信息工程学院,四川成都 611731;电子科技大学通信与信息工程学院,四川成都 611731;电子科技大学通信与信息工程学院,四川成都 611731;电子科技大学通信与信息工程学院,四川成都 611731【正文语种】中文【中图分类】TN9580 引言多输入多输出(Multiple-Input and Multiple-Output,MIMO)雷达近年来受到了广泛关注[1-3]。
2018年中国研究生数学建模竞赛E题
2018年中国研究生数学建模竞赛E题多无人机对组网雷达的协同干扰组网雷达系统是应用两部或两部以上空间位置互相分离而覆盖范围互相重叠的雷达的观测或判断来实施搜索、跟踪和识别目标的系统,综合应用了多种抗干扰措施,具有较强的抗干扰能力,因而在军事中得到了广泛应用。
如何对组网雷达实施行之有效的干扰,是当今电子对抗界面临的一个重大问题。
诸多干扰方式中较为有效的是欺骗干扰,包括距离欺骗、角度欺骗、速度欺骗以及多参数欺骗等。
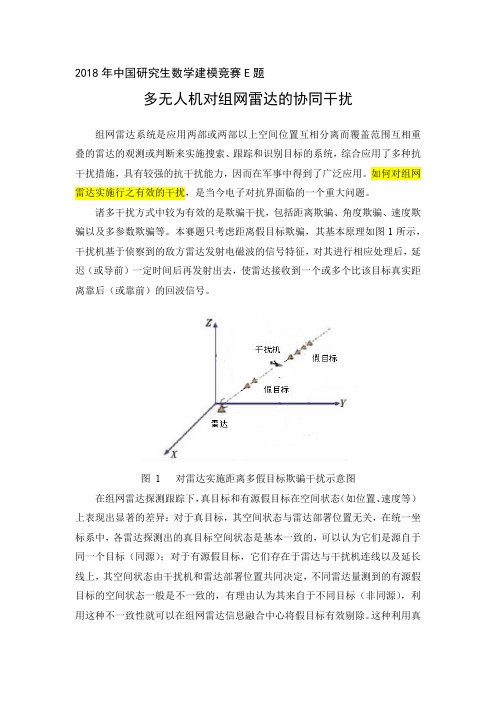
本赛题只考虑距离假目标欺骗,其基本原理如图1所示,干扰机基于侦察到的敌方雷达发射电磁波的信号特征,对其进行相应处理后,延迟(或导前)一定时间后再发射出去,使雷达接收到一个或多个比该目标真实距离靠后(或靠前)的回波信号。
图 1 对雷达实施距离多假目标欺骗干扰示意图在组网雷达探测跟踪下,真目标和有源假目标在空间状态(如位置、速度等)上表现出显著的差异:对于真目标,其空间状态与雷达部署位置无关,在统一坐标系中,各雷达探测出的真目标空间状态是基本一致的,可以认为它们是源自于同一个目标(同源);对于有源假目标,它们存在于雷达与干扰机连线以及延长线上,其空间状态由干扰机和雷达部署位置共同决定,不同雷达量测到的有源假目标的空间状态一般是不一致的,有理由认为其来自于不同目标(非同源),利用这种不一致性就可以在组网雷达信息融合中心将假目标有效剔除。
这种利用真假目标在组网雷达观测下的空间状态差异来进行假目标鉴别的思想简称为“同源检验”,它是组网雷达对真假目标甄别的理论依据。
为了能对组网雷达实施有效干扰,现在可利用多架无人机对组网雷达协同干扰。
如图2所示,无人机搭载的干扰设备对接收到的雷达信号进行相应处理后转发回对应的雷达,雷达接收到转发回的干扰信号形成目标航迹点信息,传输至组网雷达信息融合中心。
由于多无人机的协同飞行,因此在融合中心就会出现多部雷达在统一坐标系的同一空间位置上检测到目标信号,基于一定的融合规则就会判断为一个合理的目标航迹点,多个连续的合理目标航迹点就形成了目标航迹,即实现了一条虚假航迹。
2019年研究生数学建模竞赛优秀论文选-《多约束条件下智能飞行器航迹快速规划》1-40页

中国研究生创新实践系列大赛“HW杯”第十六届中国研究生数学建模竞赛学校参赛队号1.队员姓名 2.3.中国研究生创新实践系列大赛“HW杯”第十六届中国研究生数学建模竞赛题目多约束条件下智能飞行器航迹快速规划摘要:本文研究了多约束条件下智能飞行器航迹快速规划问题,这是一个多目标约束问题。
本文首先针对附件中的校正节点数据进行数据处理,构建从起点 A 到终点 B 的邻接距离网络,将航迹快速规划问题转化为0-1 多目标整数规划问题。
接着通过系统建模建立0-1 多目标整数规划模型,并通过自适应改进型Dijkstra 算法和自适应型蚁群算法,综合求解多目标规划模型,给出多约束条件下智能飞行器航迹快速规划的方案。
针对问题一,本文通过构架0-1 多目标整数规划模型,以航迹长度尽可能小和经过校正区域进行校正的次数尽可能少为目标,通过动态规划中的分阶段优化方法,给出航迹快速规划的方案。
在第一阶段利用自适应改进型Dijkstra 算法和蚁群算法得出当前满足约束条件的最优路径和最佳误差校正点。
第二阶段,在满足约束条件的基础上,应用贪婪算法在实际情况中对航行轨迹进一步优化。
针对问题一,本文求出附件一的最优航行轨迹为:起点A → 503 → 69 → 237 → 155 → 338 → 457 → 555 → 436 → 终点B,飞行器最短的航迹长度为104.9 × 103m,经过校正区域进行校正的次数为8 次;附件二的最优航行轨迹为:起点A → 163 → 114 → 8 → 309 → 305 → 123 → 45 → 160 ⟶92 → 93 ⟶61 ⟶ 292 ⟶终点B,飞行器最短的航迹长度为109.34 × 103m,经过校正区域进行校正的次数为12 次。
针对问题二,与第一问不同的是,问题二增加了飞行器在实际飞行过程中有200 米的最小转弯半径约束。
本文通过系统分析最小转弯半径约束对飞行器实际飞行路程和能否成功到达的影响,重新构建邻接距离网络和多目标规划模型。
全国大学生数学建模竞赛赛题基本解法
• 总结 • 数学建模竞赛常用方法和手段主要是下面几类:
• 1.分析类 如最优捕鱼策略 SARS的传播 微分方程 • 2.运筹学 图论 规划等 • 3.数理统计 统计分析、数据处理等 • 4.计算机 模式识别、Fisher判别、人工神经网
络、仿真模拟等 • 5.常用软件 • Matlab Mathematica Lingo SAS系统等
全国大学生数学建模竞赛贵州赛区组委会93a非线性交调的频率设计拟合规划93b足球队排名图论层次分析整数规划94a逢山开路图论插值动态规划94b锁具装箱问题图论组合数学95a飞行管理问题非线性规划线性规划95b天车与冶炼炉的作业调度动态规划排队论图论96a最优捕鱼策略微分方程优化96b节水洗衣机非线性规划97a零件的参数设计非线性规划97b截断切割的最优排列随机模拟图论98a一类投资组合问题多目标优化非线性规划98b灾情巡视的最佳路线图论组合优化99a自动化车床管理随机优化计算机模拟99b钻井布局01规划图论00adna序列分类模式识别fisher判别人工神经网络00b钢管订购和运输组合优化运输问题01a血管三维重建曲线拟合曲面重建01b工交车调度问题多目标规划02a车灯线光源的优化非线性规划02b彩票问题单目标决策仿真模拟03asars的传播微分方程差分方程时间序列03b露天矿生产的车辆安排整数规划运输问题04a奥运会临时超市网点设计统计分析数据处理优化04b电力市场的输电阻塞管理数据拟合优化05a长江水质的评价和预测统计分析数据处理预测1
• 其包括许多模块,如统计分析模块、绘图模块、 质量控制模块、SAS/ETS(经济计量学和时间 序列分析模块)、SAS/OR(运筹学模块)、 SAS/FSP(快速数据处理的交互式菜单系统模 块)、SAS/AF(交互式全屏幕软件应用系统模 块)等等。
数学建模竞赛中的数学模型求解方法

数学建模竞赛中的数学模型求解方法数学建模竞赛是一项旨在培养学生数学建模能力的竞赛活动。
在竞赛中,参赛者需要利用数学知识和技巧,解决实际问题,并提出相应的数学模型。
然而,数学模型的求解方法却是一个非常关键的环节。
本文将介绍一些常见的数学模型求解方法,帮助参赛者在竞赛中取得好成绩。
一、线性规划线性规划是数学建模中常见的一种模型求解方法。
它的基本思想是将问题转化为一个线性函数的最优化问题。
在线性规划中,参赛者需要确定决策变量、目标函数和约束条件,并利用线性规划模型求解最优解。
常见的线性规划求解方法有单纯形法、内点法等。
这些方法基于数学原理,通过迭代计算,逐步接近最优解。
二、整数规划整数规划是线性规划的一种扩展形式,它要求决策变量取整数值。
整数规划在实际问题中具有广泛的应用,例如货物运输、资源分配等。
在整数规划中,参赛者需要将问题转化为一个整数规划模型,并利用整数规划求解方法求解最优解。
常见的整数规划求解方法有分支定界法、割平面法等。
这些方法通过分解问题、添加约束条件等方式,逐步缩小搜索空间,找到最优解。
三、非线性规划非线性规划是一类目标函数或约束条件中包含非线性项的最优化问题。
在实际问题中,很多情况下目标函数和约束条件都是非线性的。
在非线性规划中,参赛者需要选择适当的数学模型,并利用非线性规划求解方法求解最优解。
常见的非线性规划求解方法有牛顿法、拟牛顿法等。
这些方法通过迭代计算,逐步逼近最优解。
四、动态规划动态规划是一种解决多阶段决策问题的数学方法。
在动态规划中,参赛者需要确定状态、决策和状态转移方程,并利用动态规划求解方法求解最优解。
常见的动态规划求解方法有最优子结构、重叠子问题等。
这些方法通过存储中间结果、利用递推关系等方式,逐步求解最优解。
五、模拟与优化模拟与优化是一种常见的数学模型求解方法。
在模拟与优化中,参赛者需要建立数学模型,并利用计算机模拟和优化算法求解最优解。
常见的模拟与优化方法有蒙特卡洛模拟、遗传算法等。
华为杯第十五届全国研究生数学建模竞赛

2
一、 符号说明
Ait
第 i 架无人机 t 时刻的空间位置
B kt
第 i 架无人机 t 时刻被干扰雷达的 空间位置
Ct i, p
t 时刻第 i 架无人机产生的第 p 个 有源假目标的空间位置
disit, j
t 时刻第 i 架无人机与第 j 架无人机 的距离
disitm ,tn 第 i 架无人机 tm 时刻和 tn 时刻空间 位置距离
3
二、问题重述
1.1 问题背景 组网雷达系统是运用多部彼此分开而探测范围相互重叠的雷达来实现搜索、跟踪和
识别目标的系统,综合运用了多种抗干扰的措施,具有较强的抗干扰能力。在电子对抗 界,如何对组网雷达系统实施干扰变成一项重要课题。
图 1 对雷达实施距离多假目标欺骗干扰 图 2 多无人机协同干扰组网雷达系统示意图 示意图
对组网雷达系统实现干扰的方式有多种,但是本赛题主要考虑距离假目标欺骗这一 干扰手段,其基本原理如图 1 所示。干扰机首先对已侦查到的敌方雷达发射电磁波的信 号特征进行处理,延迟(或导前)一定时间再发射出去,使得雷达接受虚假信号,形成 有源假目标。真实目标的空间状态与雷达位置无关,各雷达探测的真目标空间状态一样, 即认为同源。假目标的空间状态与干扰机和雷达位置有关,其位于雷达与干扰机连线或 延长线上。不同雷达探测到假目标的空间状态不一致,即认为非同源,组网雷达信息融 合中心将将之剔除。
雷达动态探测目标的仿真建模

雷达动态探测目标的仿真建模
雷达动态探测目标的仿真建模是通过模拟雷达的工作原理和目标的运动规律,来模拟雷达系统对目标的探测和跟踪过程。
该仿真建模过程主要包括以下几个步骤:
1. 设定雷达参数:首先需要设定雷达的工作参数,包括雷达的频率、功率、天线方向性等。
这些参数将直接影响雷达的探测性能。
2. 目标运动建模:根据目标的运动规律,可以对目标的位置和速度进行建模。
常见的目标运动模型有匀速模型、加速模型等。
3. 目标与雷达的相互关系:根据雷达的位置和目标的位置,可以计算目标与雷达之间的距离和方位角。
同时还需考虑雷达的工作范围和工作方向限制。
4. 探测和跟踪算法:根据目标和雷达之间的距离和方位角,可以利用目标跟踪算法来判断目标是否被雷达探测到,并实现目标的跟踪。
5. 仿真结果评估:通过对仿真过程的结果进行评估,可以分析目标的探测率、误报率、跟踪精度等指标,评估雷达系统的性能。
通过雷达动态探测目标的仿真建模,可以帮助研究人员和工程师更好地理解和分析雷达系统在不同条件下的工作效果,为雷达系统的设计和优化提供参考。
数学建模中的多目标决策与多准则决策

数学建模中的多目标决策与多准则决策在数学建模中,决策问题一直是一个重要而复杂的研究领域。
在实际应用中,我们常常会面临多个目标和多个准则的抉择,这就需要采用多目标决策和多准则决策的方法来解决。
本文将讨论数学建模中的多目标决策与多准则决策的应用和方法。
一、多目标决策多目标决策是指在决策问题中,存在多个相互联系但又有所独立的目标,我们需要在这些目标之间进行权衡和取舍。
多目标决策的核心是建立一个评价指标体系,将多个目标统一地考虑在内,并找到一个最优化的结果。
在多目标决策中,我们可以采用多种方法来求解最优解。
其中比较常用的方法有以下几种:1.加权法:加权法是将每个指标的重要性进行加权后进行综合评价,得到一个加权和最大的方案作为最优解。
这种方法简单直观,但也存在一定的主观性。
2.约束法:约束法是在满足一定约束条件的前提下,使目标函数最小化或最大化。
通过对各个目标进行约束,可以有效避免因为某个目标过分追求而导致其他目标的损失。
3.非支配排序遗传算法:非支配排序遗传算法是一种基于进化计算的多目标优化算法。
通过对候选解进行非支配排序,并根据解的适应度进行遗传操作,最终得到一组非劣解。
二、多准则决策多准则决策是指在决策问题中,存在多个相互独立但又有一定重叠性的准则,我们需要在这些准则之间进行权衡和衡量,找到最优的方案。
多准则决策通常需要考虑到几个关键因素:准则权重、准则的计算方法和准则的分值范围等。
在多准则决策的过程中,我们可以采用以下几种方法:1.正交实验设计法:正交实验设计法是一种常用的多准则决策方法。
通过合理选择实验设计方案,对多个准则进行全面而又系统地评估,得到最终的决策结果。
2.层次分析法:层次分析法是一种定量分析问题的层次结构的方法。
通过构建层次结构模型,并通过对每个层次的准则进行权重赋值,最终得到一个最优方案。
3.模糊综合评判法:模糊综合评判法是一种基于模糊数学的多准则决策方法。
通过将准则的评价结果转化为模糊数,并进行模糊集的运算,最终得到一个最优的决策方案。
2023年中国研究生数学建模竞赛f题强对流降水临近预报参考代码及思路

2023年中国研究生数学建模竞赛f题强对流降水临近预报参考代码及思路对于2023年中国研究生数学建模竞赛F题强对流降水临近预报,可以采用双偏振雷达数据和微物理特征信息进行建模。
以下是一些参考代码和思路:1.数据预处理:对双偏振雷达数据进行必要的过滤、校准等预处理,得到质
量较好的Z_H、Z_DR、K_DP数据。
2.特征工程:提取描述强对流降水微物理特征的参数,如冰晶浓度、液态水
含量、粒子谱分布等。
这些参数可以从雷达反射率Z_H、差分反射率Z_DR 和相关系数K_DP中提取。
3.建立模型:利用提取的特征参数,建立强对流降水临近预报模型。
可以考
虑采用支持向量机、神经网络、随机森林等机器学习方法进行分类或回归预测。
也可以采用深度学习模型,如卷积神经网络或循环神经网络,对数据进行深入挖掘和处理。
4.模型评估:利用历史数据对模型进行训练和验证,评估模型的预测精度和
可靠性。
可以采用交叉验证、ROC曲线、AUC值等指标进行评估。
5.优化和改进:根据模型评估结果,对模型进行优化和改进。
可以考虑采用
集成学习、深度学习等技术提高模型的预测精度和泛化能力。
同时,也可以考虑加入更多的特征参数、气象数据等,以丰富模型的输入信息。
以上是一些参考代码和思路,具体实现需要根据实际情况进行调整和完善。
同时,需要注意数据安全和隐私保护,避免数据泄露和滥用。
2023华为杯研究生数学建模f题思路详解

2023华为杯研究生数学建模f题思路详解摘要:一、背景介绍二、问题分析三、模型构建四、模型训练与优化五、模型评估六、结论正文:随着全球气候变化和环境污染问题日益严重,我国政府在2023年提出了“碳达峰”和“碳中和”的目标。
为实现这些目标,我们必须在经济社会发展中兼顾碳排放减少与经济增长。
在这一背景下,华为杯研究生数学建模竞赛F 题应运而生。
本题要求我们设计一个数学模型,利用ZH和ZDR进行定量降水估计。
以下是对该问题的详细解题思路:一、背景介绍我国为实现中华民族伟大复兴,规划了在2035年基本实现现代化、在2050年实现中国式现代化的经济社会发展目标。
因此,实现2060年碳中和的目标,必须破解发展与碳减排之间的矛盾。
其中,推动经济社会高质量发展是矛盾的主要方面。
经济增长与能源消费量以及能源消费量与碳排放量之间存在关联关系。
二、问题分析本题是一个回归问题,要求我们利用ZH和ZDR进行定量降水估计。
ZH 和ZDR是降水雷达的两个重要参数,ZH表示反射率,ZDR表示差分反射率。
我们的任务是通过这两个参数预测降水量。
三、模型构建针对这个问题,我们可以尝试以下几种回归预测模型:1.线性回归:通过拟合ZH和ZDR与降水量之间的线性关系来进行预测。
2.支持向量机:利用支持向量机建立ZH和ZDR与降水量之间的非线性关系。
3.决策树:通过构建决策树来预测降水量。
4.随机森林:采用随机森林算法进行预测。
四、模型训练与优化1.数据预处理:对原始数据进行清洗和预处理,例如缺失值处理、异常值处理等。
2.特征选择:根据特征重要性排序,选择对降水预测最相关的特征进行建模。
3.模型训练:使用训练数据集分别对线性回归、支持向量机、决策树和随机森林模型进行训练。
4.模型优化:通过调整模型参数,如支持向量机的核函数类型和参数、决策树的深度等,来优化模型性能。
五、模型评估1.使用预测数据集来评估模型的性能。
2.计算均方误差(MSE)或平均绝对误差(MAE)作为损失函数来度量模型预测值与真实值之间的差异。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于多雷达目标定位的数学模型(选作题号 A)摘要建立方程组把求雷达系统定位的最少雷达数量问题转化为以最少的方程个数n 使该方程组具有唯一解,得出结论:1、当雷达站点不共线布置时,只需要三部雷达便可实现定位;2、当所有雷达位于一直线上时,无论雷达数目是多少,均只能获得目标在x 或y 方向的坐标,不能完全定位。
对于问题二,我们采用微积分、概率论中的相关知识以及斜距离定位系统分析定位误差,建立了定位误差与测距误差和坐标误差的关系的微分方程模型。
得到结果:采用三个雷达定位时,定位误差的期望值为0,方差与雷达的测距误差r σ和坐标误差s σ成线性关系。
针对问题三,首先,建立了可选站址的定位算法模型,但此算法中雷达站址的选择具有局限性。
最后我们从概率统计的角度建立了基于最小方差的考虑误差非线性规划定位算法模型,并在具体实施中对算法进行化简,较好地解决了问题中的三组数据目标定位,得出的相应目标飞行物坐标为(-25292,6292,24003),(-28138,4315,23941),(-25461,6217,23765),并通过对结果的误差比较,给出了影响误差的因素及算法的评价。
以问题二对定位精度的分析为基础,进一步通过对定位误差分析计算并参考有关资料,给出了如下一些控制精度的建议:1、 采用先进技术,减小测距误差和站点坐标误差;2、适当增加相邻雷达站间距离;3、合理布置雷达站点空间分布;4、适当增加雷达站的数量。
在完成所有模型的建立与求解之后,我们还对模型优劣进行了比较分析和评价,并提出了相应的改进和完善的方向,并把模型进行推广使用。
关键字: 目标定位 定位误差 微分方程 坐标误差一、 问题的提出在电子对抗领域,对辐射源位置信息侦察越精确,就越有助于对辐射源进行有效的战场情报信息获取和电子干扰,并为最终摧毁目标提供有力的保障。
在某地上空发现有一可疑的飞行物,需要对其进行精确定位。
常用的定位方法是基于多基雷达的测量方法。
每个雷达都可以测量自身的坐标(,,)i i i x y z 以及它到飞行物距离ir (1,)i n =,其中n 为雷达的总数。
通过一组雷达位置坐标和飞行物到各雷达的距离测量,我们可以确定目标的空间飞行物的坐标(,,)s x y z 。
由于每个雷达在测量自身坐标和飞行物到各雷达的距离都存在测量误差,这给精确定位带来了困难。
如何选取合适的方法进行精确定位是目前对飞行物进行精确定位一个难点。
假设距离误差服从正态分布(0,)t N σ,坐标误差服从正态分布(0,)r N σ。
在这个假定下完要我们成以下工作。
一、至少需要几个雷达才能定位飞行物?二、在最少雷达的条件下,分析并比较距离误差和坐标误差对定位精度的影响。
三、在实际情况中,往往使用更多雷达进行精确定位,请设计一种定位算法。
对以下三组雷达得到的测量数据,计算飞行物的坐标。
(数据见附件一)四、试给出控制雷达定位精度的建议。
二、问题分析由题目我们可以知道,常用的定位方法是基于多基雷达的测量方法。
每个雷达都可以测量自身的坐标(,,)i i i x y z 以及它到飞行物距离ir (1,)i n ,其中n为雷达的总数。
通过一组雷达位置坐标和飞行物到各雷达的距离测量,我们可以 确定目标的空间飞行物的坐标(,,)s x y z 。
通过图2-1我们可以看到在空间坐标图 2-1 :单个雷达定位飞行物示意图系中一个雷达自身的坐标,雷达到飞行物的距离和空间飞行物的位置坐标三者之间的空间关系。
根据对题目的理解对所提出的四个问题逐一分析。
1、针对问题一,可以把最少需要多少个雷达才能定位飞行物的问题转化为以方程组中最少的方程个数n 使该方程组具有唯一解,该唯一解即为我们要求的飞行物定位坐标。
2、针对问题二,在最少雷达条件下已经知道距离误差服从正态分布(0,)t N σ,坐标误差服从正态分布(0,)r N σ,在使用最少雷达(也即三部雷达)的条件下,为了分析并比较距离误差(0,)t N σ和坐标误差(0,)r N σ对定位精度Q 的影响,我们必须首先找到距离误差和坐标误差与最终的定位误差dx 之间的关系,通过建立对两种误差的分析模型定量定性地描述距离误差和坐标误差对定位精度的影响。
3、针对问题三,根据题目中提供的数据,通过对数据的筛选分析,得到飞行物坐标变量与所提供数据之间的联系,建立一种计算飞行物坐标的算法模型,最终较为准确的得到飞行物的定位坐标。
4、对于问题四,可以通过本题目中对前三个问题所得结果的的总结和分析,找到尽量减小定位误差的方法,并通过查阅与提高雷达定位精度相关的资料,得到影响雷达定位精度的多方面因素,从而全面地提出提高雷达定位精度的合理建议。
三、模型假设1、各雷达组在地表的同一平面上,忽略地球曲率的影响。
2、在雷达对飞行物坐标进行测量时,我们认为飞行物在测量时段内处于静止状态,也就是说,误差的产生只与雷达自身有关,而与飞行物无关。
3、在空间位置上,根据雷达测距原理,我们假定雷达均处于飞行物的下方。
4、被测目标所在位置与xoy 平面距离较远(远远大于坐标误差和距离误差)。
5、假定各雷达站点站点坐标在各方向上的误差均相互独立,各测量的距离误差均相互独立,而且与站点坐标误差相互独立。
6、距离误差服从正态分布(0,)t N σ,坐标误差服从正态分布(0,)r N σ。
7、不考虑雷达及目标飞行物的形状大小,认为其位置为对应坐标系的一点。
四、符号约定4-1 x 目标飞行物的x 轴坐标 4-2 y 目标飞行物的y 轴坐标 4-3 z 目标飞行物的z 轴坐标 4-4 i x 第i 个雷达站的x 轴坐标 4-5 i y 第i 个雷达站的y 轴坐标 4-6 i z 第i 个雷达站的z 轴坐标 4-7 第i 个雷达自身的坐标4-8 第i 个雷达到飞行物的距离4-9 飞行物的坐标误差4-10 飞行物到雷达的距离函数 4-11 Q 飞行物的定位精度4-12 x δ x 轴方向定位误差(),,i i i i R x y z ir (),,x y z ∆∆∆(),,i f x y z五、模型的建立与求解5-1 求雷达系统定位的最少雷达数量设至少需要i 个雷达才可以定位飞行物,由下面的方程组则可以解出 (x,y,z)(式1.1)确定目标位置需要确定三个方向上的坐标,故至少需要三个方程才能解出定位点(x,y,z),即至少三个雷达,根据三个雷达的测得数据可以得到如下方程组:(式1.2)分两种情况进行讨论:(1)三部雷达在一条直线上此时可通过坐标转换将雷达的x 方向坐标定义在此直线上,即1230===y y y y ; 由于目标点和雷达的相对位置关系不变,因此转换坐标系对定位没有影响,此时()()()()()()()()()22221111222222222222ii i i r x x y y z z r x x y y z z r x x y y z z ⎧=-+-+-⎪⎪=-+-+-⎪⎨⎪⎪=-+-+-⎪⎩()()()()()()()()()222211112222222222223333r x x y y z z r x x y y z z r x x y y z z ⎧=-+-+-⎪⎪=-+-+-⎨⎪=-+-+-⎪⎩有方程组:(式1.3)观察式(1.2)可知,此时只能解出x,,无法解出y 和z 的值;在这种情况下,若增加雷达数目,由式(1.1)可知仍不能求解出y 和z 的值,即当雷达所在站点共线时,无法对目标定位。
(2)三部雷达不共线此时,由式(1.1)可确定方程组的唯一解(x,y,z),即能够实现对目标点的定位。
综上,至少需要三部不共线的雷达才能实现定位。
假设有三部雷达坐标为它们所测量的到飞行物的距离为化简后可以得到x,y 的系数矩阵为:相应的行列式为:123,,r r r 21213131x x y y x x y y --⎛⎫⎪--⎝⎭112121223131331101x y x x y y x y x x y y x y --=≠--()()()()()()222110222220222330r x x y y zr x x y y z r x x y y z ⎧=-+-+⎪⎪=-+-+⎨⎪=-+-+⎪⎩可以用Matlab 软件解得x ,y ,z 的值,程序为:syms x1 x2 x3 y1 y2 y3 z1 z2 z3 r1 r2 r3 x y z;[x,y,z]=solve('(x1-x)^2+(y1-y)^2+(z1-z)^2=r1^2','(x2-x)^2+(y2-y)^2+(z2-z)^2=r2^2','(x3-x)^2+(y3-y)^2+(z3-z)^2=r3^2')5-2距离误差和坐标误差对定位精度的影响。
5-2-1问题的分析与模型建立:在使用最少雷达(也即三部雷达)的条件下,为了分析并比较距离误差(0,)l N σ和坐标误差(0,)r N σ对定位精度Q 的影响,我们必须首先找到距离误差和坐标误差与最终的定位误差x δ之间的关系。
为此,在假设由每组测量数据可以得到目标的一个存在误差的方位的前提下,我们首先进行以下推导: 易知各测量站测得的目标距离:12222[()()()]i i i i r x x y y z z =-+-+- 1,2,3i = (式5.2.1)而且可设,()(,,,,,)i i i i i i i r f X X f x y z x y z == 1,2,3i = (式5.2.2)对式2.1进行全微分可得ii i i i i i i i i r x y z x y z i i if f f f f fx y z x y z δδδδδδδ∂∂∂∂∂∂=+++++∂∂∂∂∂∂ 1,2,3i = (式5.2.3) 求偏导数可得1i i i i i if f x x c x x r ∂∂-=-==∂∂ 1,2,3i =2i i ii i i f f y y c y y r ∂∂-=-==∂∂ 1,2,3i = (式5.2.4) 3i i ii i if f z z c z z r ∂∂-=-==∂∂ 1,2,3i = 因此有 s r C x x δδδ=- (式5.2.5) 式2.5中111111213222212223313233333f f f xy z c c c f f f C c c c x y z cc c f f f xyz ⎛⎫∂∂∂ ⎪∂∂∂ ⎪⎛⎫ ⎪∂∂∂⎪==⎪ ⎪∂∂∂ ⎪ ⎪⎝⎭ ⎪∂∂∂ ⎪∂∂∂⎝⎭(式5.2.6) 而111111121131212222232222313323333333s i i iii i x i i if f f x y z x y z c x c y c z f f f c x c y c z x y z x y z c x c y c z f f f x y z x y z αααδδδαααδδδαααδδδδδδδαααδδδαααδδδααα⎛⎫++ ⎪⎪++⎛⎫ ⎪ ⎪=++=++ ⎪ ⎪ ⎪ ⎪++⎝⎭ ⎪++ ⎪⎝⎭(式5.2.7)将式2.5移项后有s C x r x δδδ=+ (式5.2.8)可解得()1s x C r x δδδ-=+ (式5.2.9)其中1231123123a a a C b b b c c c -⎛⎫⎪= ⎪ ⎪⎝⎭(式5.2.10) 将式2.4与式2.7带入式2.9以后可得11111111122222222333333331[()()()]1[()()()]1[()()()]x x x y y y z z z r x r y C r x x x y y y z z z r z r x x x y y y z z z r δδδδδδδδδδδδδδδ-⎛⎫⎛⎫-+-+- ⎪⎪ ⎪ ⎪⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪=+-+-+- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪⎝⎭⎝⎭ ⎪ ⎪-+-+- ⎪ ⎪ ⎪⎝⎭⎝⎭ (式5.2.11)故可得31{[()()()]}ii i i i i i i i i ia x r r x x x y y y z z z r δδδδδ==⨯+-+-+-∑31{[()()()]}ii i i i i i i i i ib y r r x x x y y y z z z r δδδδδ==⨯+-+-+-∑(式5.2.12) 31{[()()()]}ii i i i i i i i i ic z r r x x x y y y z z z r δδδδδ==⨯+-+-+-∑至此,距离误差和坐标误差与最终的定位误差δx 之间的关系已经被找到如式5.2.12.5.2.2模型求解与分析:首先从数学期望的角度进行分析。