伺服电机选型计算数据表
伺服电机选型计算xls 表格计算

TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
kg.m2 >
初步
选择
定
R88M
-
U200
30(J
m=
根据
R88M
-
1.6E-02
U200 30的
额定转矩Tm=源自N.m1.23E-05
0.637
(N.m )
N.m N.m N.m
N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
伺服电机选型计算ls表格计算

1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
0.015605096 320
6.9017E-06
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
对摩擦力的转矩Tw
0.00015 0.000207051 0.000207051
0.015605096
2.07E-04 kg.m2 0.029 N.m
瞬时最大转矩T1 必要的最大转数N
编码器分辨率R=P.G/AP.S
0.0523 N.m 320 r/min
伺服电机选型通用计算公式

9预选伺服电机的确认
所需要加速转矩确认 TP=2Л nM(JM+JL)/60ta +TL 所需要减速转矩确认 TS=2Л nM(JM+JL)/60td -TL 转矩有效值确认 Trms2=(TP2ta+TL2tc+Ts2td)/t 0.486054898 计算值 1.236262156 0.369312404
1 机器规格
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 名称 负载速度 直线运动部分重量 滚珠丝杠长度 滚珠丝杠直径 滚珠丝杠导程 滚珠丝杠密度 减速比 直线运动外部力 齿轮+联轴器 转动惯量 摩擦系数 综合机械效率 加速时间 减速时间 运行时间 周期时间 符号 VL m LB dB PB ρ R F JG μ η ta tb tc t 数值 15 250 1 0.02 0.01 7870 2 0 0.00004 0.2 0.9 0.1 0.1 1 1.5 单位 m/min kg m m m kg/m3 N kg・㎡ s s s s 2s最大定位完成45mm
5、11、21、33
`2速度线图
加速时间 减速时间 运行时间 周期时间 负载轴转速 电机轴速度计算值 电机轴速度选择 TL=(9.8μ m+F)*PB/(2Л Rη ) 负载转矩计算值 ta tb tc t 0.1 0.1 1 1.5 s s s s min-1 min-1 min-2 N.m 0.433474876
`6负载行走功率 `7负加速功率 8伺服电机预选
计算值 0.433474876 362.255569 3000 0.000229365 200 3000 0.637 2.23 0.0000263 0.000394 最大值 2.23 最大值 2.23 额定转矩 0.637 额定输出 额定转速 额定转矩 、最大转矩 电机转子转动惯量 容许负载转动惯量
直线电机伺服电机计算工具(自动计算)
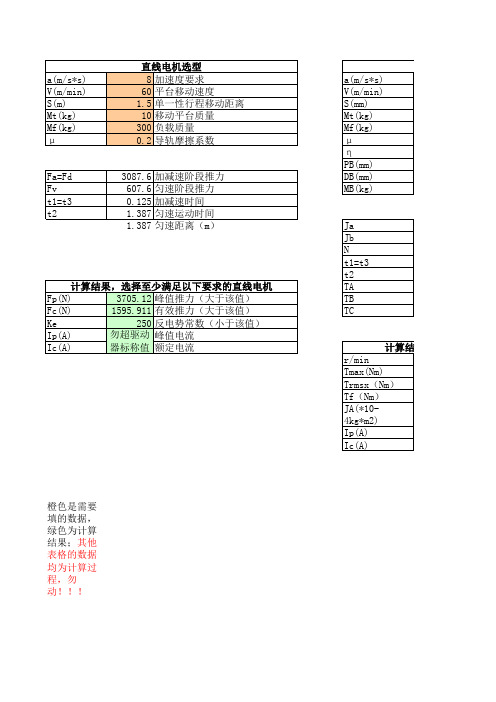
直线电机选型 8 加速度要求 60 平台移动速度 1.5 单一性行程移动距离 10 移动平台质量 300 负载质量 0.2 导轨摩擦系数
旋转电机选 a(m/s*s) V(m/min) S(mm) Mt(kg) Mf(kg) μ η PB(mm) DB(mm) MB(kg)
勿动!!!
Fa=Fd Fv t1=t3 t2
3087.6 607.6 0.125 1.387 1.387
加减速阶段推力 匀速阶段推力 加减速时间 匀速运动时间 匀速距离(m)
计算结果,选择至少满足以下要求的直线电机 Fp(N) 3705.12 峰值推力(大于该值) Fc(N) 1595.911 有效推力(大于该值) Ke 250 反电势常数(小于该值) Ip(A) 勿超驱动 峰值电流 Ic(A) 器标称值 额定电流
Ja Jb N t1=t3 t2 TA TB TC
计算结果,选择至少满足以 r/min Tmax(Nm) Trmsx(Nm) Tf(Nm) JA(*10-4kg*m2) Ip(A) Ic(A)
橙色是需要填的数据,绿色为计算结果;其他表格的数据均为计算过程,勿动!!!
旋转电机选型 5 加速度要求 60 平台移动速度 1500 单一性行程移动距离 300 移动平台质量 0 负载质量 1 导轨摩擦系数 0.9 机械传动效率 20 导螺杆节距 50 导螺杆直径 0.64 导螺杆质量
速度mm/s 1000
30.4272 2 3000 0.2 1.32 5.656745 10.4034 -4.74665
工作台转动惯量 丝杆转动惯量 电机转速 加减速时间 匀速移动时间 加速扭矩 匀速扭矩(克服摩擦所需要的扭矩) 减速扭矩
伺服电机配丝杆_选型计算(自动计算版)
初步选择定Fra bibliotekR88M
-
U200
30(J
m=
根据
R88M
-
1.6E-01
U200 30的
额定
转矩
Tm=
1.23E-05
0.637
(N.m )
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
④负载转 矩的计算
对摩擦力的转矩Tw
1.56E-01 N.m
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
1.56E-01 N.m 750 r/min
T1=TA+TL T2=TL T3=TL-TA
0.5802 N.m 0.1561 N.m -0.2681 N.m
0.317 N.m
⑨讨论 负载惯量JL 有效转矩Trms
1.07E-03 kg.m2 0.317 N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
瞬时最大转矩T1 必要的最大转数N
3.56E-05 kg.m2
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 > 0.424 N.m
伺服电机选型计算

分度盘 机构选 型计算 表格
分度盘直
径
DT=
分度盘厚
度
LT=
工作物直
径
DW=
工作物厚
度
LW=
工作台材
质密度
ρ=
工作物数 量
n=
由分度盘中心至工作 物中心的距离
l=
定位角度
θ=
定位时间
t=
加速时间
比
A=
减速机减
速比
i=
减速机效
率
ηG=
0.2 m
0.118 m
*
0.03 m
*
0.05 m
*
2700 kg/m3
*
10 个
*
0.125 m
180 °
*
3s
*
10%
10
1
1)决定 加减速时 间
加速时间
2)电机转 速
t0= t*A
= 0.3
s
360 t 0(t t 0)
减速机输 出轴角加 速度
减速机输 出轴最大 转速
电机轴角 加速度
电机输出 轴转速
3)计算负 载转矩
因为摩擦负载及小, 故忽略
4)计算电 机轴加速 转矩(克 服惯量)
工作台的 惯量
工作物的 惯量
(工作物同时绕工作物中 心轴旋转,如果工作物没有 自转,可以不考虑这部分 惯量)
工作物质 量
βG= 360
t 0(t t 0)
= 3.878518519 rad/s2
βG t0 2
N= = 11.11111111 rpm
βm= βG*i = 38.78518519 rad/s2
NM= N*i = 111.1111111 rpm
伺服电机选型计算(汇川)
LB=
1.8 m
DB=
0.025 m
PB=
0.02 m
MC
0.2 kg
DC
0.06 m
μ=
0.05
L=
1.3 m
η=
0.9
t=
0.65 s
A=
40%
FA=
0N
a=
0°
t0= t*A
= 0.26
s
NM = Vl/PB/N
= 1500
rpm
轴向负载F = FFAA+ mg(sin a cos a)
= 7.35
7)负荷与 电机惯量 比
惯量比
8)负荷与 减速机惯 量比 当负荷与 电机惯量 比>5时, 考虑采用 减速装 置,提高 惯量匹配
折算后的惯 量比
I1= 0.715738645
I2= 0.715738645
T=
2.332444717
N=
1500
*
其他常数
*
*
*
丝杠密度
*
*
*
*
* *
*
G=
9.8 m/s
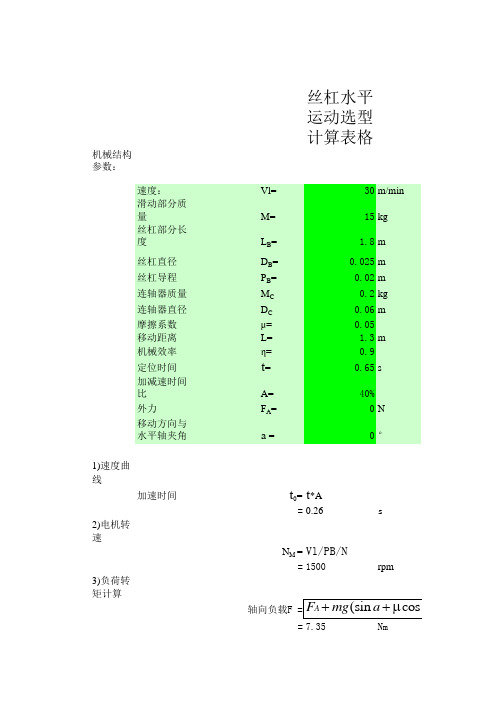
机械结构 参数:
速度: 滑动部分质 量 丝杠部分长 度
丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
1)速度曲 线
加速时间
2)电机转 速
3)负荷转 矩计算
丝杠水平 运动选型 计算表格
Vl=
30 m/m3.1416
ρ=
7900 kg/m3
a cos a)
安全系数
S=
2
电机惯量
JM=
伺服电机选型计算

3.13E-04 kg.m2
8.90E-06 kg.m2
1.57E-03 kg.m2
6.13E-01 N.m
4.69E-01 N.m
1.08E+00 N.m
1200 r/min <
3000 合格
N
1.77E-05 kg.m2 < 0.32 N.m <
虑以下计算,方能确定电机转矩
0.00 r/min <
0
N.m >
0 N.m
加减速时间为0,无加减速扭矩 N.m >
1.05E-04 不合格 JM= 1.08E+00 不合格 Tm=
5000 合格
N
1.92E+00 不合格
6.40E-01 不合格 Tm=
(脉冲/转)
U系列 的编 码器 规格 为 2048 (脉 冲/ 转) ,经 编码 器分 频比 设定 至675 (脉 冲/ 转) 的情 况下 使用 。
3000 r/min 查电机样本
1.77E-05 kg.m2 查电机样本 初步选定台达200W/220V/60MM
0.64 N.m 查电机样本
5.00E+03 r/min 查电机样本 1.92 N.m 查电机样本
电机最大转速 电机最大转矩
0.64 N.m 查电机样本
电机额定转矩
条件满足
T
Tr
TO =
Ta2ta Tr2tr T2t ta tr t ts
TO
0.2
编码器分辨率R=P.G/AP.S
675
G为减速比,AP 定位精度
2 kg 50 mm 0.50 kg 0.8 15.0 N
伺服电机选型表格最新

22
110
22
110
22
110
24
110
24
110
35
114.3
35
114.3
35
114.3
35
114.3
22
110
22
110
35
114.3
35
114.3
35
114.3
35
114.3
22
110
22
110
22
110
22
110
35
114.3
35
114.3
35
114.3
35
114.3
35
114.3
35
114.3
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
1.3
3.8
14
50
1.3
3.8
14
50
1.3
3.8
14
50
1.3
3.8
14
50
2.4
7.1
19
70
2.4
7.1
19
70
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
1.3
3.8
12.7
38.2
24
110
12.7
38.2
24
110
15.9
伺服电机选型计算(自动计算版)

负载质量M(kg5·滚珠丝杠节距P(mm10·滚珠丝杠直径D(mm20·滚珠丝杠质量MB(kg3·滚珠丝杠摩擦系数μ0.1·因无减速器,所以G=1、η=11②动作模式的决定速度(mm/s单一变化·负载移动速度V(mm/s300·行程L(mm360·行程时间tS(s 1.4·加减速时间tA(s0.2·定位精度AP(mm0.01③换算到电机轴负载惯量的计算滚珠丝杠的惯量JB= 1.50E-04kg.m2 负载的惯量JW= 1.63E-04kg.m2换算到电机轴负载惯量JL=JW J=G2x(J W+J2+J1 1.63E-04kg.m2L④负载转矩的计算对摩擦力的转矩Tw7.80E-03N.m换算到电机轴负载转矩TL=Tw7.80E-03N.m⑤旋转数的计算转数N N=60V/P.G1800r/min⑥电机的初步选定[选自OMNUC U系列的初步选定举例] 选定电机的转子·惯量为负载的JM≥J L/30 5.42E-06kg.m2 1/30*以上的电机选定电机的额定转矩×0.8TMx0.8>T L0.5096>比换算到电机轴负载转矩大的电机N.m* 此值因各系列而异,请加以注意。
⑦加减速转矩的计算加减速转矩TA0.165N.m⑧瞬时最大转矩、有效转矩的计算必要的瞬时最大转矩为T1T1=TA+TL0.1726N.mT2=TL0.0078N.mT3=TL-TA-0.1570N.m有效转矩Trms为0.095N.m⑨讨论负载惯量JL 1.63E-04kg.m2≦[电机的转子惯量JM有效转矩Trms0.095N.m﹤[电机的额定转矩瞬时最大转矩T10.1726N.m﹤[电机的瞬时最大转矩必要的最大转数N1800r/min≦[电机的额定转数编码器分辨率R=P.G/AP.S1000(脉冲/转U系列的编码器规格为204速度(mm/s3000.210.20.2时间(s初步选择定R88M-U20030(Jm= 1.23E-05 根据R88M-U20030的额定转矩Tm=(N.m≦[电机的转子惯量JM1.23E-05×[适用的惯量比=30]﹤[电机的额定转矩0.5096N.M7.8E-030.637﹤[电机的瞬时最大转矩 1.528 N.M ≦[电机的额定转数 3000 r/min U系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的情况下使用。
伺服电机简易选型表格V2.0
5.39
6000
1.7
3.18
6000
1.87 (3.12)
3.18
6000
1.87 (3.12)
3.18
3000
19.3 (21.8)
8.34
3000
19.3 (21.8)
8.34
5000
2.46 (3.71)
4.9
பைடு நூலகம்5000
2.46 (3.71)
4.9
13.5 13.5 9.54 9.54 9.54 20.85 20.85 14.7 14.7
所选电机 额定转速 所选电机 转子惯量 所选电机 额定扭矩 所选电机 最大扭矩
加速转矩 中间量 匀速转矩
减速转矩
计算结果
折算后所需电机转 速 折算后总的负载惯 量 折算后总的有效扭 矩 折算后总的最大扭 矩
所选电机额定转速 所选电机转子惯量 所选电机额定扭矩 所选电机最大扭矩
加速转矩 中间量 匀速转矩
ρ
7900 Kg/m3
J
1.514806
×104Kgm2
图示及带轮惯量计算
带轮惯量计算(填写绿色部分)
外径 内径 密度 厚度 惯量
D
75 mm
d
0 mm
ρ
2700 Kg/m3
L J
10 0.838704
m×m104Kgm2
图示及齿轮惯量计算
n
260.435361 rpm
JL Trms
7.5004 0.40620127
10 N
运行方向外力,垂直轴计入重力
3000 mm
1s
13 s
1
0
1s
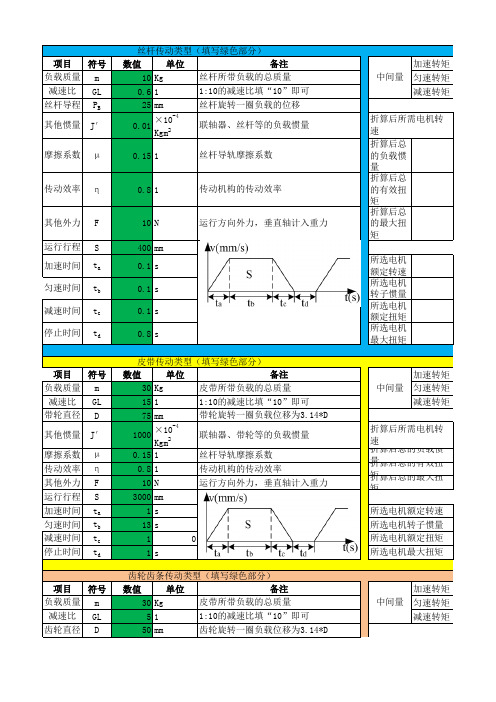
齿轮齿条传动类型(填写绿色部分)
伺服电机及丝杠选型计算(自动表格计算)

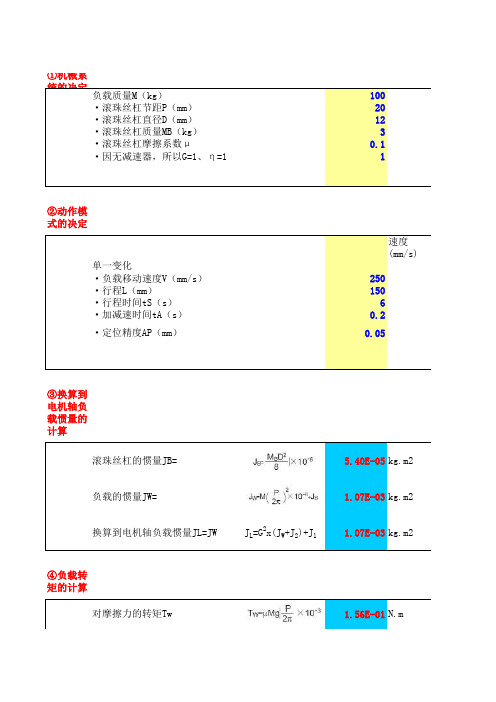
J 0 =铁Jx =铝Jy =黄铜m =尼龙d0 =外径(m)d1 =外径(m)pi l =长度(m)注:国际单位外径d 0(mm)50*0.05m 内径d 1(mm)0*0m 长度L(mm)密度ρ(kg/m 3)7800*重心线与旋转轴线距离e (mm)0*0m计算结果:0.15315251物体质量m(kg)0.15315物体惯量(kg.cm 2)0.478593754.786E-05kg.m 2外径d 0(mm):200*0.2m 内径d 1(mm):100*0.1m 长度L(mm):400*0.4m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (mm)100*0.1m计算结果:74.455683物体质量m(kg)00物体惯量(kg.cm 2)0kg.m 2不同形状物体惯量计算x 0轴(通过重心的轴)的惯性惯量 [kg·m 2]x轴的惯性惯量 [kg·m2]y轴的惯性惯量 [kg·m2]圆柱体惯量计算-圆柱体长度方向中心线和旋转中心线平行圆柱体惯量计算-圆柱体长度方向中心线和和旋转中心线垂直方形物体惯量计算质量(kg)长度x(mm):850*0.85m 宽度y(mm):950*0.95m 高度z(mm):85*0.085m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (m)600*0.6m计算结果:542.23625物体质量m(kg)35物体惯量(kg.cm 2)173395.83317.339583kg.m 2直径d(mm)80*0.08m 厚度h(mm)30*0.03m密度ρ(kg/m 3)7900重心线与旋转轴线距离e (mm)0*0m计算结果:质量0.56物体质量m(kg)35物体惯量(kg.cm 2)2800.028kg.m 2物体质量m(kg)1000*物体惯量(kg.cm 2)9.118921930.0009119kg.m2惯量J 0(kg.cm 2)1354*0.1354kg.m2质量m(kg)重心线与旋转轴线距离e (mm)600*6m直线运动物体惯量计算直接惯量计算电机每转1圈物体直线运动量A (m)饼状物体惯量计算0.006*2()2A J m π=2222,53mr mr (注明:实心球惯量=薄壁球惯量=)计算结果:质量m1(kg)35惯量J1(kg.cm2)12735412.7354kg.m27.9x103kg/m3 2.8x103kg/m3 8.5x103kg/m3 1.1x103kg/m33.14159*为必填项。
伺服电机的选型计算

⋅
2
电机转速为3000转 TL = 0.035 TL ⋅ 2 ⋅ n PZ ≔ ―――― = 12.107 η 查表得MQMA-02 Pe ≔ 0.2 JM ≔ 0.42 ⋅ 10
−4
⋅
3 1 n=⎛ ⎝3 ⋅ 10 ⎞ ⎠ ――
⋅
⋅
2
Te ≔ 0.64
⋅
TAC ≔ 1.91
⋅
(5)最短加减速时间 ⎛ ⎝JM + JL⎞ ⎠ ⋅ (n − 0) ⋅ 2 tAC ≔ ――――――― = 0.026 TAC − TL 工作时加减速时间为0.08秒,则加减速转矩为 tAC ≔ 0.08 ⎛ ⎝JM + JL⎞ ⎠ ⋅ (n − 0) ⋅ 2 TAC ≔ ―――――――+ TL = 0.641 tAC (6)运行模式及热校核 t1 ≔ 0.1 t2 ≔ 0.1 t3 ≔ 0.1 t0 ≔ 0.2 ⋅
T1 ≔ TAC = 0.641
⋅
T3‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾ T1 ⋅ t1 + T2 ⋅ t2 + T3 ⋅ t3 Trms ≔ ―――――――― = 0.405 t0 + t1 + t2 + t3
⋅
丝杆螺距 p=10mm,输送质量 W=20kg,推力0kg(无),试选择伺服电机的容量.
(1)最大移动速度v 由于采用直接传动,减速比i=1,当选择电机的额定转速为3000r/min时,工作台 的最大移动速度为: 1 p ≔ 10 i≔1 n ≔ 3000 ⋅ ―― min v ≔ n ⋅ p ⋅ i = 500 ――
2 2
⋅
2
(3)负载转矩Tl 工作台导轨移动摩擦系数=0.1,机械效率=0.9 μ ≔ 0.1 η ≔ 0.9 F≔0 ⋅
伺服电机选型参数计算表

参数名称 质量 平衡质量 平衡力 丝杠直径 丝杠导程 丝杠长度 减速比 其他惯量 摩擦系数 切削力 机械效率 倾斜角 最大进给速度 最大加速度
参数名称 电机一转移动量 电机最大转速 质量折算惯量 丝杠折算惯量 其他惯量 负载惯量 摩擦扭矩 重力扭矩 空载扭矩 切削扭矩 负载扭矩 加速扭矩
值 63% 5% 5%
型参数计算表
参数
型变量表
0.51991 0
12.8436
备注 包括工作台及工作台的负载质量
丝杆转动一圈的距离 主要包括电机到丝杠间减速机构在电机轴端的折算惯量 根据实际机械情况设定,一般滚动导轨为0.05,滑动导轨为0.1 无法确定可暂设为0,电机选型时根据空载扭矩比率进行选型
基本参数
值
500
0
0
40
0.04
6
0.006
500
0.5
1
0
0.1
0.9 0 8 5
P N J11 J12 J13 J1 Tf Tg Tm Tc Tmc Tmax
单位 m/rev rev/min kgm2 kgm2 kgm2 kgm2
Nm Nm Nm Nm Nm Nm
值 0.006 1333 0.00046 0.001
型号 参数 惯量 扭矩 最大扭矩 电机最高转速
参数 负载惯量比 空载扭矩比率 负载扭矩比率 最高转速 加速扭矩
m mb Fb
d Pb
l 1/z J13
u Fc
θ V amax
单位 kg kg N mm mm/rev mm 1/ kgm2 N ° m/min m/sec2
水平轴 丝杠
伺服电机选型参数计算表
0 0.00146 0.5199
伺服电机功率计算选型例子

微信公众号:ACE萦梦工作室
举例计算3
3. 计算电机驱动负载所需要的扭矩 克服摩擦力所需转矩Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9 = 1.387 N.m 重物加速时所需转矩TA1 = M * a * PB / 2π / η
JL=1/2*M1*r12 + 1/2*M2*r12 + M3*r12
M3 M1 r1
r2 M2
微信公众号:ACE萦梦工作室
伺服选型原则
连续工作扭矩 < 伺服电机额定扭矩
瞬时最大扭矩 < 伺服电机最大扭矩 (加速时)
负载惯量
< 3倍电机转子惯量
连续工作速度 < 电机额定转速
微信公众号:ACE萦梦工作室
按照负载惯量 < 3倍电机转子惯量JM的原则
如果选择400W电机,JM = 0.277kg.cm2,则 15625 / R2 < 3*0.277,R2 > 18803,R > 137 输出转速=3000/137=22 rpm,不能满足要求。
如果选择500W电机,JM = 8.17kg.cm2,则 15625 / R2 < 3*8.17,R2 > 637,R > 25 输出转速=2000/25=80 rpm,满足要求。 这微种信公传众号动:AC方E萦式梦工阻作室力很小,忽略扭矩计算。
伺服电机功率计算选型资料
13
举例计算1
计算圆盘转动惯量
JL = MD2/ 8 = 50 * 2500 / 8 = 15625 kg.cm2 假设减速机减速比1:R,则折算到伺服电机轴上 负载惯量为15625 / R2。 按照负载惯量 < 3倍电机转子惯量JM的原则
如果选择400W电机,JM = 0.277kg.cm2,则 15625 / R2 < 3*0.277,R2 > 18803,R > 137
i
i
( mi ri )
2 i
m F
左邊的合力矩只需考慮外力所產生的力矩,由內力所產生 的力矩將會兩兩互相抵消,如右上圖所示。
括號中的量稱為剛體的轉動慣量,以符號 I 表示
I mi ri 2
i
則上面導出的轉動方程式可寫成
I
5
此方程式為繞固定軸轉動的剛體所必須遵守的基本力學方程 式,類似於移動力學中的牛頓第二運動定律。合外力對應到 合外力矩,質量對應到轉動慣量,加速度對應到角加速度。
电机转矩tnm滑轮半径r电机转矩tnm螺杆导程pb惯量计算一负载旋转时惯量计算jl以电机轴心为基准计算转动惯量实心圆柱空心圆柱经过减速机之后的转动惯量jljkjkmk10惯量计算pb直线运动部分jkmpb经过减速机之后的转动惯量jljk二负载直线运动时惯量计算jl以电机轴心为基准计算转动惯量11惯量计算三皮带类传动时惯量计算jl以电机轴心为基准计算转动惯量m3m2m1r1r2电机转矩tnm小轮1质量m1kg小轮1半径r1m小轮2质量m2kg小轮2半径r2m重物质量m3kg减速比r1r21rjl12m1r112伺服选型原则伺服电机最大扭矩加速时电机额定转速13举例计算1已知
r sin
作用線
伺服参数计算表

=编码器分辨率<p/r>*设定脉冲当量<mm/p>*10^3*减速比分母/减速比分子 =机械部分每圈位移量<mm>*10^3; *丝杠螺杆可输入丝杠导程,圆盘结构的输入360,同 步带等结构的输入带轮的周长;
*此部分输入机械位移量,计算PLC输出脉冲数和校验是否超过可输出最大脉冲数 (2^32),一般很少能超过的吧,超过了只能做相对定位了
伺服电机电子齿轮比计算公式
编码器分辨率<p/r> 每脉冲移动量<脉冲当量mm/p> 机械部分每周(或丝杠每转)移动距离 <mm> 机械减速比 分子(机械端) 分母(电机 端) CMX CDV 比率 机械移动每mm需脉冲数<p/mm> PLC可输出最高脉冲频率<p/s> 电机额定转速<r/min> 输入机械位移量<mm> 计算PLC输出脉冲数<p> 可输出最大脉冲数<p> 计算输出脉冲数校验 输入机械位移速度<mm/s> 计算PLC输出脉冲频率<p/s> 当前速度时电机转速<r/min> 输出脉冲频率是否超限校验 电机转速是否超限校验 依最大可输出脉冲计算可输入最大位 移速度<mm/s> 依电机额定速度计算可输入最大位移 速度<mm/s> 10000 0.01 534 1 30 3000000 534000 5.617977528 100 200000 3000 2000 200000 4294967296 OK 4 400 13.48314607 OK OK 2000 890 最大速mm/min 最大速mm/min 直径<mm> 圆周长计算<mm> 周长取整数 比率结果校验 OK 3000 534 CMX计算公式 CDV计算公式
数控机床伺服电机的选择计算

JL Jm×2.5JM:伺服电机的转动惯量
(3)加速扭矩TA
TA= +TF(Nm)
TA Tmax×0.8Tmax:伺服电机最大扭矩
(4)最大切削扭矩Tc
TC= +TF(Nm)
TC Tms×1.5Tms:伺服电机额定扭矩
(5)连续有效负荷扭矩Trms
Trms= TC (Nm)TC:最大切削扭矩D:最大工作率
(2)直连最大切削扭矩Tc
Tc= +TF≈0.16FZ×PB(Nm)
TC≈0.16FZ(千牛)×PB(毫米)
Trms TMS×0.8 Tms:伺服电机额定扭矩
(6)最大负荷持续时间tLON
计算超负荷百分比TC/TMS和最大工作率D,从图表上查出伺服电机允许的最大持续时间tMON
tLON tMONtMON:伺服电机允许持续时间
2.快速估算
(1)加速扭矩TA
TAmin)×(JL+ JM)(10-3Kgm2)
数控机床伺服电机的选择计算
1.选择依据计算
(1)最大速度n
n= × Fg0:g0速率PB:丝杠螺距
Z1:电机侧齿数Z2:丝杠侧齿数
n nmaxnmax:伺服电机最高转速
(2)马达轴上折算负载惯量JL
床鞍滑板和刀架总惯量JT=mT (Kgm2)
马达侧齿轮Z1惯量J1
丝杠侧齿轮Z2惯量J2
丝杠惯量JS= 0.77×103D4L(Kgm2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
1.63E-04 kg.m2
#REF!
N.m
0.1726 N.m
1800 r/min 1000 (脉冲/转)
﹤[电 机的额 定转矩 ﹤[电 机的瞬 时最大 转矩 ≦[电 机的额 定转数 U系列 的编码
初步 选择 定 R88M U200 30(J m=
1.23E-05
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
①机械系
统的决定
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
0.5096 > 7.8E-03
0.165 N.m
0.1726 N.m 0.0078 N.m -0.1570 N.m #REF! N.m
⑨讨论 负载惯量JL
有效转矩Trms 瞬时最大转矩T1 必要的最大转数N 编码器分辨率R=P.G/AP.S
1.63E-04 kg.m2
≦[电 机的转 子惯量 JM
④负载转 矩的计算
对摩擦力的转矩Tw
换算到电机轴负载转矩TL=Tw
7.80E-03 N.m 7.80E-03 N.m
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
1800 r/min
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
5.42E-06 kg.m2
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=Байду номын сангаасA+TL T2=TL T3=TL-TA
0.637
(N.m )
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
1.528 N.M
3000
r/mi n
条件满足
条件满足 条件满足 条件满足 条件满足