传感器动态误差修正的若干方法研究
物理实验技术中的传感器校准和数据校验方法介绍
物理实验技术中的传感器校准和数据校验方法介绍传感器在物理实验中起着非常重要的作用,它们可以将物理量转变为电信号,以便我们对其进行测量和分析。
然而,传感器在工作过程中常常会产生误差,因此需要进行校准和数据校验以确保测量结果的准确性和可靠性。
一、传感器校准方法传感器的校准是指通过与准确的参考值进行比较,来确定传感器输出与所测量物理量之间的关系。
校准方法主要分为静态校准和动态校准两种。
1. 静态校准静态校准是指在稳定状态下,通过对传感器的输出信号与已知参考值进行比较,以获得校准曲线,从而将传感器输出与物理量之间的关系建立起来。
常用的静态校准方法包括零点校准和量程校准。
- 零点校准:将传感器暴露在无物理量作用的环境中,将输出信号调整为零,以消除传感器的零偏误差。
- 量程校准:将传感器依次暴露在不同已知物理量作用下,通过记录输出信号与物理量的关系,建立起校准曲线,以消除量程误差。
2. 动态校准动态校准是指在运动状态下,通过对传感器输出和运动参考值进行比较和修正,以获得更准确的结果。
动态校准方法常用于涉及运动和变化的实验中,例如飞行器的姿态测量。
常用的动态校准方法包括卡尔曼滤波和模型识别。
- 卡尔曼滤波:通过融合传感器输出和已知的物理模型,利用贝叶斯估计原理,来对传感器数据进行滤波和校准,以提高测量结果的准确性。
- 模型识别:通过建立物理模型和传感器输出的关系,并采用系统辨识的方法,对传感器输出进行修正和校准。
二、数据校验方法传感器校准后,得到的数据并不一定完全准确,还需要进行数据校验以验证数据的可靠性。
数据校验方法主要分为内部校验和外部校验两种。
1. 内部校验内部校验是指通过对传感器本身的状态和特性进行检查和分析,来判断传感器输出数据是否可靠。
常用的内部校验方法包括冗余检验和自检功能。
- 冗余检验:利用多个相同或不同类型的传感器同时测量同一物理量,并对比它们的输出数据,以检测是否存在异常值或错误。
- 自检功能:传感器内置了自检电路和算法,可以对自身的状态和工作特性进行监测和评估,以及时发现并排除故障。
误差校正方法
误差校正方法
1 错误差校正
传感器是控制系统中的重要组成部分,其准确度和稳定性直
接关系到控制系统的准确性和完整性,因此维护传感器的准确度和稳
定性就变得尤为重要,如何有效的维持传感器的性能就成为研究的重点。
错误差校正技术为让传感器的性能达到最优提供了一种补救措施。
2 工作原理
错误差校正技术通过系统本身的误差表达式,并采用有效的
线性补偿来校正传感器的原始数据,从而改善传感器检测精度。
实现
过程主要有如下几步:
(1)用试验构建了传感器的误差模型;
(2)将传感器原始数据和试验数据进行对比,分析传感器误差运
行趋势;
(3)根据误差趋势,设计并建立传感器误差补偿系统,以满足传
感器的误差要求;
(4)安装好线性补偿参数,对传感器原始数据进行校正,提高了
采集系统的准确度;
(5)对系统校准的结果进行评估,确定系统完成校准的精度。
3 优势
错误差校正技术具有误差补偿精度高,可靠性强,容易操作和维护等优点,在控制精度要求比较高的系统中能够有效满足控制系统的实时性要求,准确度高“。
从而极大提高了控制系统对信号处理的精度,为控制系统提供了可靠的参数补偿,从而提高控制系统的性能。
4 结论
随着科技的进步,自动控制系统的功能不断强化,其核心部件——传感器在系统工作中起着至关重要的作用,错误差校正技术能够有效的改善传感器的性能,从而极大提高控制系统的性能,成为实现控制精度无极限的重要技术。
光学传感器的检测与校准方法研究
光学传感器的检测与校准方法研究光学传感器是一种能够通过感知和测量物体的光学特性来获取信息的传感器。
它们广泛应用于自动化系统、机器人技术、医疗设备、工业生产等领域。
然而,由于光学传感器一直处于接触物体表面的环境中,其精确度和准确性可能会受到环境因素的影响,因此需要进行检测与校准来确保其测量结果的可靠性和稳定性。
一、光学传感器的检测方法光学传感器的检测方法可以分为外部检测和内部检测两种。
1. 外部检测外部检测主要通过对光学传感器外部的光源、物体和环境进行监测,以确定传感器的测量结果是否准确。
首先,对传感器的光源进行检测。
光源的稳定性和均匀性对传感器的测量结果具有重要影响。
可以通过使用标准光源和光度计来测量光源的强度和颜色,以确保光源的稳定和均匀。
其次,对传感器的测量环境进行检测。
环境因素如温度、湿度、风力等对光学传感器的测量结果具有较大的影响。
可以使用温湿度计、风速计等仪器来监测环境因素,并将其纳入传感器测量结果的修正模型中。
最后,对传感器的测量物体进行检测。
测量物体的形状、材料、表面状态等因素可能会影响光学传感器的测量结果。
可以使用三维检测仪、显微镜等设备对物体的形状和表面状态进行测量和分析,以确保光学传感器的测量结果与真实值一致。
2. 内部检测内部检测是指对光学传感器内部的光学元件、电子元件和信号处理部分进行检测,以确定其性能是否正常和稳定。
光学元件的检测可以使用光学显微镜、干涉仪等设备来观察和测量。
主要包括光源、透镜、反射镜、滤光片等元件的有无损坏、表面是否清洁等方面的检测。
电子元件的检测主要包括传感器的电路、信号放大器和模数转换器等部分。
可以使用特定仪器对电子元件进行测量和分析,以检测是否存在电路断开、元件老化等问题。
信号处理部分的检测主要包括传感器的灵敏度、线性度和响应时间。
可以使用标准灯源和指定物体来进行测量和比较,以确定传感器的性能指标是否满足要求。
二、光学传感器的校准方法光学传感器的校准是指通过对传感器的测量结果进行修正,使其与实际值之间的差异最小化。
传感器非线性误差的修正
传感器非线性误差的修正摘 要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、 引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
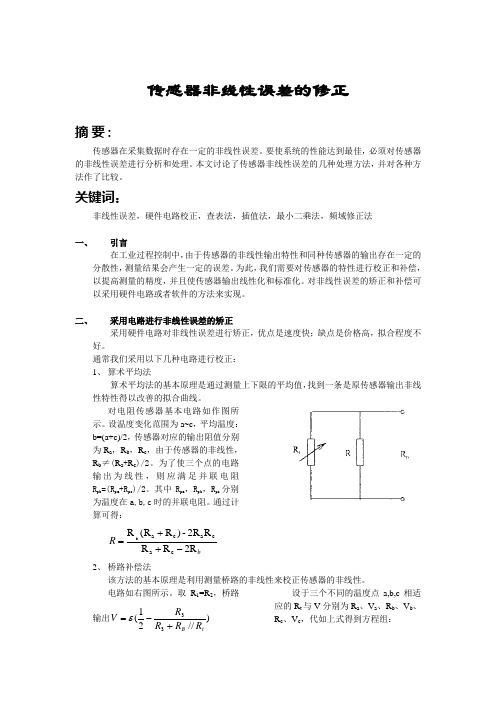
二、 采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。
MEMS传感器设计中的精度校准方法研究

MEMS传感器设计中的精度校准方法研究MEMS传感器是一种微型化的传感器,具有体积小、重量轻、功耗低、响应速度快等优点,广泛应用于各种领域,如汽车电子、医疗仪器、智能手机等。
在MEMS传感器设计中,精度校准是非常重要的一环,可以有效提高传感器的测量精度和稳定性。
精度校准是指通过对MEMS传感器实际输出值与标准值进行比较分析,找出误差源并进行补偿,以达到提高传感器测量精度的目的。
在MEMS传感器设计中,精度校准主要包括以下几种方法:一、零点校准零点校准是指在传感器没有受到任何外力作用时,记录其输出值作为零点参考值,通过与标准值的比较来修正传感器的零点误差。
零点校准可以通过激励传感器产生零位输出,或者通过软件进行零点偏移校准。
零点校准是保证传感器测量准确性的基础,是其他校准方法的前提。
二、灵敏度校准灵敏度校准是指在传感器受到外力作用时,记录传感器输出值与标准值之间的差异,通过修正增益值来提高传感器的灵敏度和线性度。
灵敏度校准可以通过改变电路中的放大倍数或者调整传感器的物理结构来实现。
灵敏度校准可以有效减小传感器的非线性误差,提高测量的准确性。
三、温度补偿温度对MEMS传感器的稳定性和精度影响非常大,温度补偿是一种常用的校准方法。
通过在传感器中加入温度传感器,实时监测环境温度,并根据温度变化对传感器输出值进行修正,从而提高传感器的稳定性和精度。
温度补偿需要在不同温度条件下进行实验,建立温度补偿模型,通过对测量数据的处理来实现。
四、误差分析与修正在MEMS传感器设计中,误差分析是非常重要的一步,只有找出误差来源才能有效进行修正。
通过对传感器工作原理、电路结构、传感器元件材料等因素进行分析,找出误差来源,并采取相应的修正措施,如调整工艺参数、优化电路设计等方式来提高传感器的精度和稳定性。
五、实验验证最后一步是通过实验来验证传感器的精度校准效果。
选择合适的测试方法和测试仪器,对校准后的传感器进行多次测量,分析实验数据,评估传感器的精度和稳定性。
动态误差修正方法的研究

误差与不确定度动态误差修正方法的研究□黑龙江省哈尔滨市计量检定测试所张蕴冬 陈永利 浦 军动态测量是被测参数处于动态情况下的测量 ,这时系统的 内部状态 、结构和动态特性在受到干扰时随时间变化而变化 , 将产生测量误差 。
由于这种动特性 ,动态测量误差是未知的 ,为了得到较高的测量准确度采用实时误差修正技术是一种较好 的途径 。
本文采用灰色模型进行预测修正得到很好的效果 。
一 、实时误差修正的基本原理 在计算机应用十分普遍的今天 , 用计算机进行数据处理 , 对测量误差做实时修正是必然的 。
通常修正过程大致分为四 个阶段 , 即误差分离 、误差建模 、误差修正和给出测量结果 , 其 测量与数据处理过程如图 1 所示 。
y , 它与离散化后的 y k 信号进行实时比对 , 从而将离散化后的测量误差 Δy ( k ) 从测量值中分离出来 ,进行实时修正 。
Δy ( k ) 中含有系统误差和随机误差 ,为了把系统误差从测 量误差中分离出来 , 必须建立一个精确描述这种确定性发展趋势的数学模型 , 如用回归法 、拟合法等 , 由于动态测量误差 中确定性成分具有随时间变化的特性 , 因此对模型的动态特 性要求较高 , 但回归法等方法不具有动性 , 因此必须寻找一种新的方法来建立动态模型 。
采用鉴于灰色模型 ( GM ) 预报法 , 则可揭示系统的变化规律 ,可对系统的未来做出预测 。
灰色模型建立后 , 用后验差检法对模型准确度进行检验 , 即用灰色预测模型预报测量误差并与插入的标准量做实际比较 , 检查结 果是否满足为零 , 否则修改灰度作用量 , 直到满足要求 。
用建 立起的修正了的误差模型预报测量误差值再与标准节点的实 际误差进行比较 ,来修正测量结果 。
二 、灰色建模与实时误差修正 已知动态误差 ,它可表示为 : 输出信号 y ( t ) ( t ) + ΔY ( t )图 1输入信号 x ( t ) 是被测量 Y 0 ( t ) 经测量装置的传感器作用 而产生的 , 它被测量装置处理后产生输出信号 y ( t ) , 而 y ( t ) Y 0 ( t ) + Δy ( t ) ,其中 Y 0 ( t ) 为理想输出信号 ,Δy ( t ) 为测量误Δy ( t ) = Δy 0 ( t ) + Δy d ( t )( 1)= 差信号 , 它再经计算机或硬件电路进一步信号处理给出测量结果 Y ( t ) = Y 0 ( t ) + ΔY ( t ) , 其中 ΔY ( t ) 含有测量过程中信号 变 换 与 传 输 原 理 产 生 的 误 差 和 测 量 过 程 中 的 动 态 误 差 Δy( t ) 。
传感器布置优化准则及模型修正方法研究
传感器布置优化准则及模型修正方法研究传感器布置优化准则及模型修正方法研究传感器布置在许多工程和科学领域中起着至关重要的作用,对于获得准确可靠的数据具有重要的影响。
本文将探讨传感器布置优化的准则和模型修正方法,以提高传感器的测量精度和可靠性。
一、传感器布置优化准则1. 最小化测量误差:传感器布置应尽量减小测量误差,以确保获得精确的测量结果。
这可以通过将传感器布置在需要测量的目标附近,并避免潜在干扰因素的影响来实现。
2. 考虑空间分布:对于大范围的测量任务,传感器的布置应考虑目标区域的空间分布。
通过合理的布置,可以最大限度地覆盖整个目标区域,并获得全面的数据。
3. 考虑传感器之间的相互影响:传感器之间的相互作用可能会导致测量误差的增加。
传感器的布置应避免传感器之间的相互干扰,以确保获得准确的测量结果。
4. 避免冗余:在传感器布置中,应避免冗余的情况。
过多的传感器可能会增加成本,并使数据处理变得复杂。
因此,应根据需要调整传感器的数量和布置位置。
5. 考虑难以布置的环境因素:在某些特殊的环境中,传感器布置可能受到限制。
例如,恶劣的气候条件、难以到达的地点等。
在布置传感器时,应考虑这些环境因素,并根据实际情况做出相应的调整。
二、模型修正方法研究1. 校准传感器:传感器常常存在一定的系统误差和随机误差。
通过校准传感器,可以消除和修正这些误差,提高测量的精度。
传感器的校准可以通过实验测试和数学建模等方法进行。
2. 误差修正模型:根据传感器测量的误差特点和原因,可以建立相应的误差修正模型。
该模型可以根据测量数据对传感器输出进行修正,并获得更准确的测量结果。
误差修正模型可以基于统计学方法、数学建模方法等进行。
3. 数据融合技术:传感器布置优化还可以通过数据融合技术来实现。
数据融合技术可以将多个传感器的测量数据进行集成,从而提高测量的准确性和可靠性。
数据融合技术可以基于传感器性能、传感器位置等因素进行优化。
4. 传感器网络优化算法:传感器网络的布置和优化是传感器布置优化的重要方面。
一种利用插值法校正传感器误差的方法
一种利用插值法校正传感器误差的方法一种利用插值法校正传感器误差的方法摘要:传感器是现代科技的重要组成部分,在各个行业及领域中均有着广泛的应用。
但是,传感器存在一定的误差,这使得它们在精度上存在缺陷。
为了解决这个问题,本文提出了一种基于插值法校正传感器误差的方法。
通过对传感器的输出信号进行分析,结合基于插值法的数据分析技术,本文从理论和实践两个方面探讨了该方法的有效性和实用性,并给出了相关的实验结果和应用案例。
关键词:传感器;误差校正;插值法;数据分析;精度一、引言传感器在现代科技中起着非常关键的作用,它们可以将物理或化学量转换为电信号或其他信号,并渐渐地推动了现代科技发展的进程。
无论是工业生产、医疗器械、环境监测还是科学研究等领域,传感器都有着广泛的应用。
但是,传感器作为一个精度、稳定性较高的设备,其厂家标定值与实际值之间总会存在一定的差异,这就会给使用者带来误差,误导用户的判断。
因此,为了提高传感器的精度和稳定性,需要对传感器进行误差校正。
传感器误差校正是一项重要的技术,不仅可以提高传感器的工作精度,而且可以减小误差对实际应用造成的影响。
本文提出了一种基于插值法校正传感器误差的方法。
通过对传感器输出信号的分析,结合基于插值法的数据分析技术,采用实验验证的方法来检验该方法的实用性和有效性。
二、传感器误差的成因为了更好地校正传感器误差,需要了解传感器误差产生的原因。
传感器误差是由多种因素引起的,包括环境因素、器件制造工艺、内部结构设计和电路技术等。
环境因素包括温度、湿度、压力等物理因素,这些因素会影响器件的工作状态,进而对传感器输出信号产生影响。
器件工艺是指材料及制造工艺方面的问题,这些因素会导致传感器的产品质量问题,例如生产批次不均等。
内部结构设计是指传感器的基本电路设计,例如,信号放大器、滤波器等都会影响传感器输出信号的精度和准确性。
电路技术是指传感器的电子元件选型、电路设计等问题。
这四个方面因素相互影响,导致传感器的误差产生。
关于压力传感器的误差修正和标定
关于压力传感器误差修正和标定1.如何对压力传感器进行误差补偿压力传感器精度高,要求误差合理,进行压力传感器的误差补偿是其应用的关键。
压力传感器主要有偏移量误差、灵敏度误差、线性误差和滞后误差,本文将介绍这几种误差产生的机理和对测试结果的影响,同时将介绍为提高测量精度的压力标定方法以及应用实例。
目前市场上传感器种类丰富多样,这使得设计工程师可以选择系统所需的压力传感器。
这些传感器既包括最基本的变换器,也包括更为复杂的带有片上电路的高集成度传感器,对于光学压力传感器主要考虑光强度损耗和距离对传感器性能的幸运。
由于存在这些差异,设计工程师必须尽可能够补偿压力传感器的测量误差,这是保证传感器满足设计和应用要求的重要步骤。
在某些情况下,补偿还能提高传感器在应用中的整体性能。
传感器最简单的数学模型即为传递函数。
该模型可在整个标定过程中进行优化,并且模型的成熟度将随标定点的增加而增加。
从计量学的角度看,测量误差具有相当严格的定义:它表征了测量压力与实际压力之间的差异。
而通常无法直接得到实际压力,但可以通过采用适当的压力标准加以估计,计量人员通常采用那些精度比被测设备高出至少10 倍的仪器作为测量标准。
由于未经标定的系统只能使用典型的灵敏度和偏移值将输出波长转换为压力,测得的压力的误差。
这种未经标定的初始误差由以下几个部分组成:偏移量误差由于在整个压力范围内垂直偏移保持恒定,因此光缆距离修正将产生偏移量误差。
灵敏度误差产生误差大小与压力成正比。
如果设备的灵敏度高于典型值,灵敏度误差将是压力的递增函数。
如果灵敏度低于典型值,那么灵敏度误差将是压力的递减函数。
该误差的产生原因在于扩散过程的变化。
线性误差这是一个对初始误差影响较小的因素,该误差的产生原因在于硅片的物理非线性。
线性误差曲线可以是凹形曲线,也可以是凸形曲线。
对于光纤MEMS压力传感器线性误差极小,线性误差误差主要来源反而是设备大波长和小波长输出的误差。
主要依靠设备校准,保证测试设备的波长输出线性度,降低线性度误差。
物理实验技术中的传感器校准与灵敏度提升方法
物理实验技术中的传感器校准与灵敏度提升方法传感器在物理实验中起着至关重要的作用,它们能够将各种物理量转换为电信号,为科学家提供准确的测量数据。
然而,传感器的准确度和灵敏度在实验过程中常常面临着挑战。
为了使实验结果更加精确,科学家们不断探索和改进传感器校准与灵敏度提升的方法。
在本文中,我们将探讨一些常用的技术和策略。
一、传感器校准方法在进行物理实验之前,传感器的准确性必须得到验证和校准。
下面介绍几种常见的传感器校准方法。
1. 标准品校准法:该方法是将传感器和已知精确值的标准品进行比对。
通过测量标准品的实际值和传感器读数的差异,可以确定校准曲线或修正系数,以提高传感器的准确性。
2. 预测模型校准法:该方法利用传感器的输入输出数据建立预测模型,然后与真实数据进行对比。
通过不断调整模型参数,可以提高传感器的准确性。
3. 加权回归校准法:该方法利用统计学的回归分析技术,通过对传感器读数和实际值的多次测量进行加权回归,来估计传感器的准确性。
二、传感器灵敏度提升方法传感器的灵敏度是指其对输入信号的变化程度的响应能力。
在某些实验中,需要提高传感器的灵敏度以获得更加精确的测量结果。
以下是几种常用的传感器灵敏度提升方法。
1. 信号放大器:传感器输出的信号通常非常微弱,而信号放大器可以将其放大到合适的幅度。
通过选择恰当的放大倍数,可以提高传感器的灵敏度。
2. 信号处理技术:通过使用数字滤波、平滑处理等信号处理技术,可以消除传感器信号中的噪声和干扰,提高传感器的灵敏度。
3. 使用增强技术:有些传感器可以通过使用增强技术来提高其灵敏度。
例如,在红外传感器中,可以使用干涉滤波器来增强信号,提高传感器的灵敏度。
4. 多个传感器的组合使用:在某些情况下,使用多个传感器的组合可以提高整体系统的灵敏度。
通过将它们的输出信号取平均或进行差分运算,可以获得更加精确的测量结果。
5. 传感器结构优化:有时候,对传感器的结构进行优化设计可以提高其灵敏度。
感应同步器动态误差分析及修正

信号 频率 和 的关 系 。频 率 的变 化 必 然 导 致 采 样
时刻 的变 化 , 当 于 在 采 样 时 增 加 了 新 的延 迟 , 相 影 响 了系统 的动 态 精 度 ¨。许 多 文 献 在 式 ( ) 2 的
1 测角原理及 问题 的提出
? = U CS) “ mOO t 0
【 e= s (o i ∞ t一0() n t)
() 1
式( ) 1 中 、 为 常 量 , 。为 激 磁 信 号 角 频 率 , 0() t为归 一化 的机 械转 角 。 由于 0() t 自身 是 个 时
变量 , 因此感 应 同步 器 的输 出又 可 以表示 为 :
基 础上 推 出动 态误 差 的修正 值 。 在 实 际 系 统 中 , 们 知 道 , 率 的 变 化 确 实 是 我 频
21 0 0年 3月 2 0日收到
91 2 载人航天项 目( 5 94 2 0 资助 0 2 50 0 X)
第一作者简介 : 张
育 , , 国科 学 院上海 技术 物理 所博 士研 究 男 中
4 0 26
科
学
技
术
与
工
程
l O卷
e :
n
【 一 一, ( ( ) 0 3 ] )
£ :
∞0+
△ 一_ —
【2 0o+ 0f 2)
△
() 4
式 () 0 3 中 为采 样 到 的相 位 角 信 号 , 0 0 和 之差
即为系统 的动态 误差 。另外 , 从式 ( ) 2 和式 ( ) 以 3可
双相 激磁 感 应 同 步 器 的输 入 输 出关 系 可 以表
直线时栅传感器全误差模型与误差修正方法研究

ds l c me ts n o . h b ss o e t g u oa r r mo e f p r d c ro s Ab e er r n h r l ip a e n e s r On t e a i f s t n p tt l er d l o e i i er r , b ro s a d t ema i o o
为可能 。
关键词 :直线时栅 ;全误 差模 型 ; 组合校准 ; 误差修正 中图分类号 :T 22 6 P 1 . 文献标识码 :A 文章编号 :10 -7 7 2 1 ) 8 0 70 0 09 8 ( 02 0 - 8 -3 9
St y 0 o a r o o e nd e r r c r e to ud n t t le r r m d la r o o r c i n
T e p e i o e c e o ±0 5 ̄ m a trc ir t g E p r n sp o et a i meh d sl e h i c l is e h r cs n r a h st i . L m/ f a b a i . x e me t r v t h s t o ov st e df ut su s e l n i h t i
,
( . n ie rn s a c e tro eh nc l et g T c n l ya d E up n , 1 E gn ei gRee r h C n e f c a ia T s n eh oo n q ime t M i g
M i it y o u a in, o g i g Un v r i fTe h o o y, o g i g 4 0 5 Ch n n s r fEd c t o Ch n q n ie st o c n lg Ch n q n 0 0 4, i a; y 2 S h o fI s r m e t t n S i n e a d Op o ee t o i sEn i e r n He e i e st f . c o lo n t u n a i ce c n t - lc r n c g n e i g, f i o Un v r i o y
传感器动态校准方法

传感器动态校准方法传感器的动态校准是一个复杂的过程,涉及到多个学科的知识,包括物理学、力学、数学等。
以下是几种常见的动态校准方法:1. 正弦力法:被校力传感器安装在电磁振动台上,质量块连接在力传感器上。
正弦力标准装置是采用五个加速度传感器测试质量块顶面加速度。
各模块同步工作,同时进行数据处理,获得校准结果。
2. 冲击力法:力传感器信号和加速度传感器信号都被程控标定仪采集后转换为数字信号。
在动态力传感器量程范围内选,用冲击力标准装置对动态力传感器进行校准。
对于选择的每个测量点,在冲击力标准装置的同一高度,连续冲击3次。
各模块同步工作,同时进行数据处理,获得校准结果。
3. 在线测量和自适应算法:这种方法需要在称重传感器的安装和固定后进行初始校准。
这一步骤可以通过施加已知质量的物体来进行。
将已知质量的物体放置在称重传感器上,记录下称重传感器输出的数值。
根据已知质量和传感器输出的数值,可以计算出校准系数。
校准系数可以用于将传感器的输出值转化为真实物体的重量。
在实际使用过程中,动态校准方法需要进行在线测量。
在线测量是指在物体称重的同时,对称重传感器的输出值进行实时监测和记录。
这可以通过连接称重传感器和数据采集系统来实现。
数据采集系统可以记录下称重传感器的输出值,并将其与已知质量的物体进行对比。
通过在线测量,可以得到称重传感器输出值和真实物体重量之间的差异。
这种差异可以被视为误差,需要通过自适应算法进行修正。
自适应算法可以根据测量误差的大小和方向来调整称重传感器的校准系数。
以上方法仅供参考,如有需要,建议查阅传感器动态校准方面的文献或咨询相关领域的专家学者,获取更全面准确的信息。
温度传感器动态校准的研究

温度传感器动态校准的研究王紫君1406014201摘要:本文综述了传感器动态校准的现状,包括它的概念特点数据处理方法等。
特别是针对温度传感器动态校准的方法进行了研究,给出了校准装置的选择和评定结果的一些方法。
关键词:温度传感器动态校准数据处理1引言随着科学技术的不断发展,非电量的测试与控制技术已经越来越广泛地应用,尤其是在航天、航海、冶金、能源、生物医学、交通运输、自动检测与计量和称重等技术领域。
而且随着社会的发展,这种技术也逐步渗透到人们的日常生活中。
可以毫不夸张地说,测试技术与自动控制技术水平的高低是衡量科学技术现代化程度的重要标志之一[ 1]。
传感器是实现测试与自动控制的首要环节。
如果没有传感器对原始信息进行准确可靠的捕获和转换,计算机发展的水平再高,依旧无法进行测试和自动控制。
任何一种传感器在制造、使用时都需要对其设计指标进行一系列实验,以确定传感器的基本性能。
2传感器动态校准的研究现状2.1国内外研究现状传感器的动态校准一直是学术领域一个比较活跃的课题。
近十几年来,它从原来主要应用于军事国防领域,逐渐向民用领域转变,使得在这方面研究的人越来越多。
对传感器的动态校准,国外相对而言研究的时间较长,涉及的领域也更宽一些。
像美国、俄罗斯、德国、印度等,都取得了较高的水平。
在国内,特别是近5、6年,一些研究院所和部分大学在该领域都进行了深入的研究,取得了比较令人满意的成果。
2.2动态校准的概念动态测量与静态测量相比,不仅要使用响应足够快的传感器和二次仪器,而且还要进行从原始测量结果到最终测量结果的复杂解算,即信号恢复。
为了使信号恢复成为可能,必须事先知道所使用的传感器的动态响应特性。
动态校准就是在这样的客观需求的情况下,产生并发展起来的。
静态校准以量值(或标量)表示,而动态校准是确定一个函数(或矢量),可以将其理解为在规定条件下,为确定传感器动态响应特性的一组操作。
2.3传感器动态校准的内容传感器进行动态校准,主要由两方面因素决定:1.动态标定由于传感器广泛应用于生产过程的自动检测,新型传感器不断被研制出来。
传感器动态误差高速并行修正方法及其FPGA实现
WU Ja , H N h i W NG Wel n in Z A G Z ie j , A ni a
( ain l fne e aoaoyo l t n aue etTcnlg , o h U i rt C ia,a u n0 0 5 ,hn ) N t a De s yL brtr o e K fEe r iMesrm n eh o y N r nv syo hn T i a 3 0 1 C ia co c o t ei f y
p e e t d. i t s r s n e W t hi meh d, h p r mee s f t e o e s tr v i he n u n e f PS h to t e a a tr o h c mp n ao a o d t if e c o O a g rt m’ i iil l lo ih S n ta c n iin . o r aie r a —i o rc in fr s ns rS d n mi ro t g p e a al lsr cu e o p i z d o d to s T e l e lt z me c re to o e o ’ y a c e r,he hih s e d p r l tu t r fo tmie e c mpe s t ri e ine y u i g t e d srb t d a ih tca d i sr aie n FP o n ao sd sg d b sn h itiu e rt me i n ti e lz d i GA h p. hee pei n a e u t c i T x rme tlr s ls s o ta h g p e r le o h w h tt e hih s e d paa llc mpe s tr d e o ny c re ts n o ’ y mi ro b tas u o h n a o o s n to l o c e s rS d na c e r, u lo c td wn t e c n u to fh r o s mp i n o adwa e r s ur e r a l n mpr v h a lng r t fs se efc iey. r eo c sge t a d i y o e t e s mp i ae o y t m fe t l v Ke y wor : y a c e o s;mp o e SO l o i ds d n mi r r i r v d P ag rt ; srb t d a i mei FP hm dit u e rt i h tc; GA ; y a c c mp n ao d n mi o e s t r
Azure Kinect DK深度传感器误差分析和修正方法的研究
24研究与探索Research and Exploration ·生产管理与维护中国设备工程 2020.08 (下)Azure Kinect DK 是一款开发人员工具包,配有先进的 AI 传感器,适用于复杂的计算机视觉和语音模型。
Azure Kinect 组合了先进的深度传感器、空间麦克风阵列、摄像机和方向传感器相结合,提供了多种功能。
图1 Azure Kinect 深度相机图与上一代的产品Kinect for Windows 相比,Azure Kinect 设备具有更高的硬件规格,同时具备音频、视频、深度和运动传感器,可以全方位感知环境,构建丰富的解决方案。
特别提供的深度相机支持工作模式最大提供Azure Kinect DK 深度传感器误差分析和修正方法的研究谢秀齐,何演权,奉彦文,何晓昀(广东理工学院,广东 肇庆 526000)摘要:针对Azure Kinect DK 深度传感器获取的深度数据存在较大误差的均匀现象,本文对其进行了测试分析,发现测量距离在8.5m 以内时精度较高,误差在20mm 精度以内,当测量距离大于8.5m 后,误差随距离增加而快速增加。
本文提出使用多项式曲线拟合方法对误差进行修正,使用该方法修正后的误差距离8.5m 以内时精度保持不变,距离在8.5m 至12m 范围明显降低系统误差,控制在50mm 以内,且分布均匀。
试验证明该方法可以较好地修正Azure Kinect DK 传感器测量系统误差,提升其距离测量精度。
关键词:Azure Kinect DK;深度传感器;误差分析中图分类号:TP212 文献标识码:A 文章编号:1671-0711(2020)08(下)-0024-02角度120°×120°,分辨率1024×1024的3D 测距功能。
1 Azure Kinect DK 测距原理Azure Kinect DK 使用的测距原理为飞行时间(ToF),其原理与结构光类似采用主动探测机制,通过向待测空间投射光脉冲,根据接收到反射光的相位差计算反射点的深度数据。
关于传感器动态校准技术研究的探讨
doi:10.11823∕j.issn.1674-5795.2021.02.16关于传感器动态校准技术研究的探讨周宁(航空工业北京长城计量测试技术研究所,北京100095)摘㊀要:动态校准技术的难点在于非电量传感器的动态校准, 静标动用 的方法在一定条件下是合理的;温度传感器的动态校准面临着比压力传感器更多有待研究的问题㊂对动态校准技术的研究,扩展和提升了对计量概念的理解和认知㊂对于被校系统的特性分析已超越基于溯源的测量,将成为计量学首要的研究内容㊂动态校准技术的研究与发展应当给予更加充分的关注和投入㊂关键词:动态校准;动态特性;非电量传感器;线性系统中图分类号:TB9㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀文章编号:1674-5795(2021)02-0119-05Discussion on the Research of Dynamic Calibration Technology for TransducersZHOU Ning(Changcheng Institute of Metrology&measurement,Beijing100095,China)Abstract:The difficult point of dynamic calibration technology is the dynamic calibration method for non-electricity transducers.It is rea-sonable with some premise that results from the static calibration are used to the dynamic one.The dynamic calibration of thermo-transducer is fa-cing more problems than the dynamic calibration of pressure transducers.The realization and understand of the metrology concept is promoted and developed by the research on dynamic calibration technology.The analysis on the characteristics of calibrated object is more important than the measurement based on traceability and will become the primary research content of metrology.The research and development of dynamic calibra-tion technology should be given more attention and investment.Key words:dynamic calibration;dynamic characteristics;non-electricity transducers;linear system0㊀引言动态校准技术,特别是应用于任意连续信号测量的传感器动态校准技术,一直是国内外计量测试行业关注和发展的重点㊂2016年世界计量日的主题确定为动态世界中的计量 (Measurement in a Dynamic World)㊂2018年5月27日,中国科协在第20届中国科协年会闭幕式上发布了2018年60个重大科学问题和工程技术难题,由航空工业计量所/国防计量一中心/计量与校准技术重点实验室长热力分室提出的㊁经由中国航空学会报送的 面向工程应用的高精度动态测量 ,被列为我国空天科技技术领域工程技术难题之一㊂这些都说明,动态校准与测试技术正在成为国内外工程界所关注的重点,其相应的理论探索㊁工程实践和设备研发也应当成为计量测试行业科研规划和创新发展的重点㊂1㊀动态校准技术的基本问题动态信号一般指幅值随时间变化的信号;静态信号指幅值不随时间变化信号,也可以视为动态信号的特例㊂动态是绝大多数被研究物理量基本的㊁普遍的存在方式㊂动态校准(Dynamic Calibration),又称动态量校准,指确定计量器具动态性能的校准[1]㊂动态校准技术是指定量确定被校器具对于动态信号的测量行为特征的技术㊂基础性科学以及技术科学所研究的复杂过程㊁极端过程㊁瞬态过程,都需要通过对动态信号量值及其变化的测量,来了解状态的变化过程和变化规律㊂因此,动态校准技术一直是准确认识和细致研究客观物理对象首要的㊁不可或缺的环节,也是国际计量科学界长期探索的重要问题㊂典型测试系统的信息流按功能划分如图1(a)所示,从非电被测量形态的变化角度描述如图1(b)所示㊂对于测量动态信号的测试系统,其每一组成部分的动态特性均对全系统的动态性能产生影响,例如:数字量传输与处理子系统 必须满足系统实时性要求; A/D变换器 变换速率必须满足系统采样率要求;电信号放大器 本征带宽必须大于输入信号的带宽㊂图1㊀典型测试系统的信息流以上示例处理的都是数字量或模拟量电信号,技术成熟㊂比较难处理的是被测量ң电量,也就是非电模拟量传感器动态特性的确定与应用㊂因为在非电量转换为电量信号的过程中,转换系数受到动态信号频率组分变化的影响,输出波形相对输入波形产生畸变,不仅测量准确度下降,而且动态误差的定义和描述都变得十分困难㊂由此可见,非电量传感器(以下简称传感器)动态特性已成为制约整个测试系统动态特性的瓶颈与关键所在[2]㊂而这些传感器恰恰广泛应用于国防科技工业各领域的试验过程测试中,直接关系到对复杂过程内部运动状态和机理的判断㊁认识和分析㊂所以传感器的动态校准问题不解决,就无法实现对各种复杂物理过程及其变化规律的认知与掌握,这已成为长期困扰重大装备发展的瓶颈性问题㊂因此,通过对动态校准技术的研究,客观地认识㊁描述和掌握传感器的动态测量行为特征及其确定方法,将显著地㊁系统性地㊁全面地提升我国国防科技工业试验过程的动态测试水平,同时这也是国防计量科研部门㊁研究所义不容辞的责任和使命㊂2㊀非电量传感器动态校准技术的基本问题目前,非电量计量校准所采用的技术,基本上是静态校准技术㊂但许多传感器都有动态应用要求,比如温度㊁流量㊁压力㊁力㊁冲击㊁振动㊁角运动量等传感器,这就需要研究如何对这些传感器进行动态校准的问题㊂静态计量校准的基本方法是针对输出(响应)曲线上的某一点,参照标准输入值,给出不确定度(误差区间+置信概率)㊂它代表了被校传感器的静态误差特性,供使用者在实际使用时进行误差修正㊂同理,动态计量校准也应当对输出(响应)曲线上的任一点给出不确定度(误差区间+置信概率),作为被校传感器的动态误差,供使用者在实际使用时进行误差修正㊂但实际上这似乎是不可能的,因为传感器的动态输出特性曲线对应着无数点,而每一点的数值不仅与输入值有关,同时与该点的频率特性因素有关,所以无法像静态校准那样,用有限个点的不确定度来直接代表整个有效量程内的不确定度㊂也就是说,从满足普适性要求的角度来说,传感器的动态误差是抽象的,无法具体描述,也就没有统一的具体定义㊂重要的问题是:使用者如何掌握传感器的动态误差,以便对动态测试结果进行修正?这是计量科学和技术部门应当研究和回答的基本问题㊂这个问题不解决,就无法对绝大多数复杂过程进行测量和研究㊂目前,解决这个问题的主要途径有两类:第一类,降低传感器动态误差定义的完备性㊂也就是只关注传感器在某种限定条件下的动态特性㊂例如,对于冲击传感器,只关注其最大幅值;对于振动传感器,只关注其对特定正弦激励的响应,等等㊂这是目前比较常见的做法,已经有了较成熟的规范体系㊂第二类,对于压力㊁温度㊁流量等测量连续任意信号的传感器,现在通常的所谓动态校准方式,是给出阶跃响应的上升时间T s ,它能够定性地表示工作带宽,T s 越小,工作频带越宽㊂以最典型的压力传感器为例,除了T s 之外,还可以通过扫频的方法,得到被校传感器的幅频函数㊁相频函数和谐振频率等特性㊂尽管上升时间T s ㊁幅频函数F (f )㊁相频函数Φ(f )和谐振频率F r ,大大丰富了被校传感器动态特性的描述内容,但仍然没有满足客户的基本校准要求,即:如何利用校准结果对传感器的实际测量数据进行修正?目前流行的做法是,在工作频带内以静态校准结果作为动态校准的不确定度,提供给用户作为校准结果,也就是饱受争议的所谓 静标动用 方法㊂3㊀ 静标动用 方法的合理性简述用静态标定的误差去代表动态标定的误差,听上去似乎有些不严谨,这就需要通过理论分析去得出客观的结论㊂根据线性系统理论,对于一个线性系统来说,如果同时满足公式(1)㊁公式(2)两个条件,则该线性系统就具有群时延传输特性,如图2所示㊂①幅频函数F (f )工作频带是平直的,即F (f )=A(1)②相频函数Φ(f )与频率成正比,即Φ(f )=Bf (2)其中,A ,B 均为常数,且A >0,B >0;f 为各频率分量的频率㊂所谓 群时延 是指信号在经过系统传输过程中,图2㊀群时延系统的幅频函数和相频函数其频谱中各频率分量的幅值以及在频谱中的相对位置保持不变,各频率分量的能量以相同的延迟出现在系统输出端,这样在系统输出端重组的时域信号与输入端完全相同,也就是可以实现信号在时域中的无畸变传输,但同时会产生一个时域上的延迟B,如图3所示[3]㊂在这种条件下,无论是静态信号还是动态信号,通过系统传输时都不会发生畸变,静态误差特性与动态误差特性相同,因此, 静标动用 在符合 群时延的条件下,理论上是合理的㊂需要注意的是,以往 静标动用 的条件仅强调符合公式(1),而从上面的分析可知,还必须同时满足公式(2),才能使系统具有群时延特性,进而实现 静校动用㊂图3㊀群时延传输系统的时域特性不严格满足公式(1)和公式(2)时,将会带来哪些误差?如何评价这些误差?则是计量科学工作者应当研究的㊂研究的结果,或对静态指标进行修正,或拟定传感器不合格判据㊂以上简要说明了对于具有群时延特性的传感器,在其工作频带内,可以直接采用静态校准结果来表征其动态误差特性㊂实际上,目前只有压力等少数传感器能够通过扫频方法来获得常用频带内的幅频特性和相频特性,因此,以压力传感器作为典型来研究传感器的动态校准理论和方法是比较方便的㊂ 静标动用在一定条件下是合理的,也是目前对于测量连续信号的压力传感器,目前能够给出动态时域校准结果的唯一方法㊂需要注意的是,对于闭环控制应用场合的反馈应用来说,输出信号相对于输入信号的相位差就是一个不可忽视的问题㊂需要研究如何在反馈控制环路中消除相位差的影响以及相应的计量校准方法㊂以上只是压力传感器动态校准技术的内容,它把计量校准限定在 线性系统㊁恒定的幅频特性㊁与频率呈线性的相频特性 等特定的理想条件之下,只是为了说明动态校准原理㊂在实际操作中,一定会有许多并不理想的条件,在研究和编制校准方法标准时,需要认真考虑㊂这些问题也应当成为动态校准技术科研项目的主要内容之一㊂另一个需要探讨的问题与动态校准的标准源有关㊂若想获得一个测量系统的幅频函数和相频函数,扫频测量是最直接可靠的方法㊂但对于许多传感器来讲,一个标准的扫频信号源很难实现,比如温度㊁流量㊁转矩等等㊂最常用和有效的方法或许是利用冲激脉冲或阶跃信号激励产生的响应,通过数学变换方法得到被校传感器的幅频函数和相频函数㊂但由于实际产生的冲激脉冲或阶跃信号都不可能是理想化的,这种间接变换法所带来的附加误差必须在动态校准的标准性文件中加以充分说明和规范㊂4 关于温度传感器的动态校准技术压力传感器只是需要进行动态校准的传感器之一,其它种类的传感器应当根据具体的需求开展相应的动态校准技术研究工作㊂比如广泛应用的温度传感器,其动态校准技术就具有自身的特点㊂首先,研制符合要求的温度扫频标准信号源是一个难度极大的问题,而由机械装置产生的温度阶跃激励,其上升时间明显偏大㊂利用激光作为标准的温度冲激激励,是一个值得探索的思路㊂另外,如果把被校传感器在校准过程中所接收到的热功率称之为传导热功率,则被校传感器的动态响应与传导热功率密切相关㊂这意味着不同的传导热功率,会激发出不同的动态响应,而传导热功率与热激励标准源的工作原理㊁工作方式㊁热物理场结构以及热交换方式等多种因素密切相关㊂这就需要研究制订温度传感器动态特性计量校准的标准方法(含传导热功率的评价与测量等)并建立此标准内容与实际使用条件的等效换算路径㊂由于温度测量的特点,使得研究利用冲激和阶跃响应解算获得幅频函数和相频函数并明确其理论误差变得格外重要和迫切㊂因为只有这样才能够判定符合群时延条件,即公式(1)㊁公式(2)的工作频带范围,从而借助静态温度校准结果,给出工作带宽范围内的动态温度测量不确定度㊂以上表明,温度传感器的动态校准面临着比压力传感器更多有待研究的内容㊂5㊀进一步加强传感器动态校准技术研究先进的计量校准技术与其它技术不同:首先,在任何条件下都不可能通过国际采购的途径获得㊂国际航空强国可以出售先进的航空装备,但决不允许别人接近(更不要说了解)它的工程计量体系,这才是核心机密㊂在现如今复杂多变的国际大环境下,先进的计量技术更是只能依靠自己努力,自主创新㊂其次,计量科学与技术是一门独立的学科,具有自身独特的发展规律,它的发展应当适当超前于其应用的显性需求,而不能仅仅满足于跟在用户需求的足迹后面亦步亦趋,要主动为之㊂这样才能为各项装备型号工程提供及时的㊁足够的技术支撑,才能在国际计量科学领域通过自主创新占有一席之地㊂鉴于以上两点,计量科研骨干力量的各专业研究实体,应当认真梳理科学发展思路和用户需求趋势,制订合理有效的发展战略目标,明确实施路径,勇敢地肩负起时代赋予的计量科学发展的历史责任㊂5.1㊀应关注计量校准技术的特点动态校准技术是传感器的一项十分重要的性能评价技术㊂没有完备的动态校准技术,就没有成熟可靠的动态测试技术,两者相互依赖㊁相互融合,但又在功能㊁目标和手段上具有明显的区别㊂以往成熟的静态校准技术奠定了良好的计量技术基础,但已明显不能满足用户对于动态过程的测量需求,不能适应我国各型装备自主创新的大环境要求㊂虽然近十几年来,从事计量测试的广大科技人员在传感器动态校准方面做了大量的探索和科研工作,也取得了一大批实用性较强的科研成果,但总体来看,传感器动态校准无论是科学理论探索㊁技术规范制订还是新型动态标准源的研制等方面,依然存在战略构思不足㊁成果系统性不够,技术体系不完整等短板,与实际需求相差明显㊂加强传感器动态校准技术研究的另一项重要意义在于,我国无论是国防装备体系还是国民经济制造业,都面临着由机械化㊁自动化向信息化㊁智能化转型的重大挑战,而自动化㊁信息化㊁智能化,其实现都是建立在传感器的卓越性能以及人们对传感器各种特性能够熟悉掌握的基础之上的㊂毫无疑问,传感器的动态特性正是系统工程师们需要熟悉掌握的重要知识之一,所以传感器的动态校准技术也就成为人们认识㊁了解与掌握传感器动态特性的唯一途径㊂从这个角度以及本文前述的分析,有必要对 计量 一词的含义做更加深入㊁全面的探讨㊂之前人们的概念中,计量的本质就是建立在溯源基础上更加精准的测量㊂这种理解没有问题,但简单地把 计量等同于测量 ,这种基于静态的概念是不全面的,尤其是动态校准技术的发展和理念的扩张,大大超出了 计量等同于测量 的涵盖范围[4]㊂结合传感器动态校准技术的分析,应当把计量工作的本质进一步扩展为:在溯源基础上,定量确定被校器具的测量行为特征参数㊂因为在传感器动态校准过程中,需要解决的已经不仅仅是如何测量的问题,而是如何客观地认识㊁表述㊁分析被校传感器对于动态信号的转换规律并以若干代表性参数(工作带宽㊁动态测量不确定度㊁谐振频率等)进行表征㊂理所当然,这种概念的扩展也涵盖了对静态校准技术本质的描述,静态校准可以视为动态校准的一种特例,最明显的区别在于:对动态校准来说,首先要对传感器的动态测量特性开展系统性的分析㊂对于 被校系统的响应特性分析 已经超越 基于溯源的测量 ,成为计量学首要的研究内容㊂应当指出,动态特性仅仅是传感器各种基本特性中的一种,只有根据使用的要求,将各种相关特性(例如:环境㊁可靠性)的测量行为特征逐一定量确定之后,被校器具的应用才能够得心应手[5]㊂这种对于计量概念的扩展和提升,绝不仅仅是简单的文字修改,更主要的是,对于计量校准本质的深入理解有助于人们开拓视野,能够站在更高的角度去认识和谋划计量科学与技术的发展战略,更加有力地发挥基础科学对工程技术的引领和推动作用㊂5.2㊀动态计量校准技术亟待解决的问题上述内容表明,传感器动态校准技术的发展是大势所趋,同时也面临着许多待解决的科学或技术问题,大致梳理后罗列如下:1)现有的传感器动态校准技术是建立在线性系统群时延特性理论基础之上的,作为线性系统理论的应用,同质信号的传输与异质信号的传输(传感器变换)是否存在着特性差异?是否还有其它的理论可以解决传感器动态校准问题?这需要进行理论探索和实验验证㊂2)对于线性系统的非线性渐变部分如何定义㊁补偿和处理,需要研究制订统一的标准来规范㊂3)对于非线性传感器如何进行动态校准?4)理想的冲激激励和阶跃激励标准源在客观物理世界是不存在的,由于标准源误差导致的被校传感器冲激响应或阶跃响应的误差,与由其数学转换形成的幅频函数和相频函数的误差两者之间的关系是怎样的?解决这个问题有助于对应用冲激或阶跃标准源的动态校准过程的误差进行全面准确的评估,从而大大扩展动态校准技术的应用范围㊂5)采用 静校动用 方法时,需要首先验证被校传感器是否同时满足公式(1)和公式(2),这点应当以校准规范形式固化下来㊂6)温度传感器动态校准时的传导热功率如何测量㊁评价以及进行标准化控制,是完善温度传感器动态校准技术的基础㊂7)对于动态测试技术来讲,一个带有普遍性的实际问题是,在固㊁液态介质中测量冲击型压力传感器,其对测量对象的敏感度与抗冲击强度之间的矛盾问题㊂总地来讲,对于连续任意非电量传感器的动态校准技术,依然处于发展的初始阶段,表现为1)检定规程或校准规范数量少,技术体系不完善,目前许多校准活动是按照双方的技术协议开展,技术成熟度和标准化程度不高;2)动态校准业务不活跃,表面上用户需求似乎不强,实际上反映了用户对动态校准意义认识模糊,计量界也未能做出有影响力的推动措施,使得最终用户对这项技术没有信心,现实中动态测试的不确定度往往靠推断和估计㊂众所周知,传感器不经过规范的校准,其测试结果是无效的,在某种情形下具有很大风险; 3)动态校准技术的学术交流活动开展得比较少,反映了对该领域基本的科学问题的思考以及工程实践问题的探索不够活跃㊂6 结束语一项没有得到普遍应用㊁没有经受过大量工程实践考验的计量校准技术,不能称得上是成熟技术,不能提供合乎用户要求的商品化的服务,无法形成对社会生产力发展的有力支撑,无法将先进的计量校准技术服务转化为获取社会回报的有力工具,也许会导致先进的技术发展停滞或趋于夭折㊂所以,应当从用户的需求出发,抓住机遇,大力加强传感器动态校准技术的研究和成果应用,尽快建立成熟㊁完备的技术体系, 加快科研成果从样品到产品再到商品的转化 [6]㊂实际上,用户需求的呼声是很高的㊂2020年11月初,中国航空学会计量分会㊁动态测试与校准航空科技重点实验室和‘计测技术“杂志,在宁夏银川市成功举办了 动态校准与测试技术交流研讨会 ,会议代表来自高校㊁航空工业㊁中国航发㊁中国商飞㊁航天㊁兵器㊁船舶㊁核工业㊁中电科㊁部队及地方的计量与测试用户约160多人,围绕着传感器动态校准和动态测试技术的科研与应用,开展了十分热烈的讨论㊂与会代表的共同感觉,就是要大力加强和推动我国传感器动态校准技术的发展,完善相关的理论和技术体系,为应对即将到来的动态测试技术全面展开应用的需求形势,做好充分的理论㊁技术和设施准备㊂动态测试技术是认知㊁分析复杂物理过程的基本手段,而动态校准技术是动态测试技术的基础㊂两者相互联系㊁互为依托,又分工明确㊁目标不同㊂动态校准技术除了通过自主创新,没有其它获取途径㊂目前,我国在动态校准技术的理论㊁技术和高水平设备等各方面与未来的需求相比,还有明显的差距,尤其是技术体系的完善和标准体系的建立方面还有很大的发展空间㊂这一点应当在研究制订和实施 十四五 计量科技相关发展规划时,给予充分的关注和投入㊂参考文献[1]国防科技名词大典综合卷编委会.国防科技名词大典(综合)[M].北京:航空工业出版社,兵器工业出版社,原子能出版社,2002.[2]祖静,马铁华,裴东兴,等.新概念动态测试[M].北京:国防工业出版社,2016.[3]管致中,沙玉钧,夏恭恪.电路㊁信号与系统[M].北京:人民教育出版社,1979.[4]梁志国,张大治,吕华溢.动态校准,动态测试与动态测量的辨析[J].计测技术,2017,37(1):30-34. [5]周宁,鲁敏.面向工作条件的传感器校准[J].计测技术, 2018,38(4):6-9.[6]习近平谈治国理政第三卷[M].北京:外文出版社,2020.收稿日期:2021-01-03作者简介周宁(1961-),男,研究员,博士,中国航空学会计量分会副主任委员,中国空气动力学会测控专业委员会委员㊂1983年,本科毕业于天津大学电子工程系,1989年,硕士研究生毕业于中国航空研究院飞行器仪表与测试专业,2014年,博士研究生毕业于北京航空航天大学经济管理学院㊂1983-1999年,在原航空航天部634所从事数据采集系统的研制工作,曾获航空航天部青年优秀科技论文一等奖2次㊁三等奖1次,并编制了行业标准(HB6489-91)㊂1999-2016年,先后在中国航空工业第二集团公司㊁中国航空工业集团公司基础技术研究院从事科研管理工作;2016年,任航空工业北京长城计量测试研究所专务㊂。
动态误差分离与修正方法报告

动态测量误差分离与修正方法摘要:动态測量数据与静态测量数据一样,不可避免地存在误差,因此动态测董数据的处理结果也必然存在误差。
为了可靠地给出动态测量数据处理结果的精度, 必须对动态测量误差及其评定进行分析研究。
农文主要论述动态测量误差分离与修正方法中若干关键技术,以及其发展现状和发展趋势,并且阐述一种动态测量误差的新理论和新技术的应用。
关键字:动态测量误差分离与修正新技术一、动态测量误差分离与修正方法中若干关键技术1动态测量的概念与特性1.1概念测量装置在动态下使用的测量即为动态测量。
动态是以测量装置输出变化信号为特征的。
根据动态测量的定义,符合下列条件之一的测量过程都是动态测星:①被测对象的量值在时域上是变化的;②被测对象的量值在时域上是恒定的,但在空间域匕是连续或间断变化的,而测量系统处于动态状态下对被测量进行测量: ③被测对象的量值在时域和空间域上都是恒定的,但与被测对象有关的测量信号是变化的。
1.2特性1.2.1时空性任何运动的物体都具有时间性和空间性,空间位置的变化必然伴随着时间的推移或变更。
从这种意义上说,动态测量所测得量或测量信号时随时间而变化的量看,动态测最数据也表现为测星时间的函数,即动态测量具有时变性,可用时间参数來描述。
但对于不同的具体测量对象的测量系统,这种时变性应做广义理解,在有些情况下,它可能用时间参量來描述比较方便,而对于大多数儿何量动态测量系统,尤其在数据处理时用空间参量描述更方便,不仅量纲与被测量相同,且数据处理更简单,从这个意义上來说,动态测量具有空间性,所以我们说动态测量具有时空性。
1. 2. 2随机性动态测量过程难免存在各种干扰,这些噪声表现为随测量吋间的随机函数。
此外,被测量自身有时也可能是一个随机函数,动态测量是对整个测量信号随机样本空间的被测量随机样本子空间若干个样本的实现,当测最系统对被测最进行采样时,得到的是若干个随机序列。
因此,动态测星具有随机性。
传感器动态误差修正方法探讨

传感器动态误差修正方法探讨
孙海波;孔德仁;何瑛;朱明武
【期刊名称】《南京理工大学学报(自然科学版)》
【年(卷),期】2000(024)004
【摘要】该文介绍了频域动态修正方法的原理及存在问题,采用在传感器之后增加一动态补偿环节来改善传感器之性能,探讨了补偿环节频率响应函数的求取方法,讨论了动态补偿数字滤波器的设计方法及传感器存在动态误差的判据,通过典型传感器的动标数据,用基于沃尔什函数的最小二乘建模方法获取该传感器之传递函数,设计了相应的动态补偿数字滤波器,并进行了计算机仿真计算.
【总页数】4页(P330-333)
【作者】孙海波;孔德仁;何瑛;朱明武
【作者单位】南京理工大学机械学院,南京,210094;南京理工大学机械学院,南京,210094;南京理工大学机械学院,南京,210094;南京理工大学机械学院,南
京,210094
【正文语种】中文
【中图分类】TN713.7;TP212
【相关文献】
1.基于QPSO算法的传感器动态误差实时修正方法 [J], 李悦;钟新跃
2.一种传感器动态误差实时修正方法及其FPGA实现 [J], 李悦;钟新跃
3.压力传感器动态误差修正方法的FPGA实现 [J], 杨文杰;张志杰;王代华;陈青青
4.传感器动态误差高速并行修正方法及其FPGA实现 [J], 吴健;张志杰;王文廉
5.时栅位移传感器动态误差模型及修正算法研究 [J], 杨继森;李小雨;张静;江中伟因版权原因,仅展示原文概要,查看原文内容请购买。