SPI时钟模式的配置
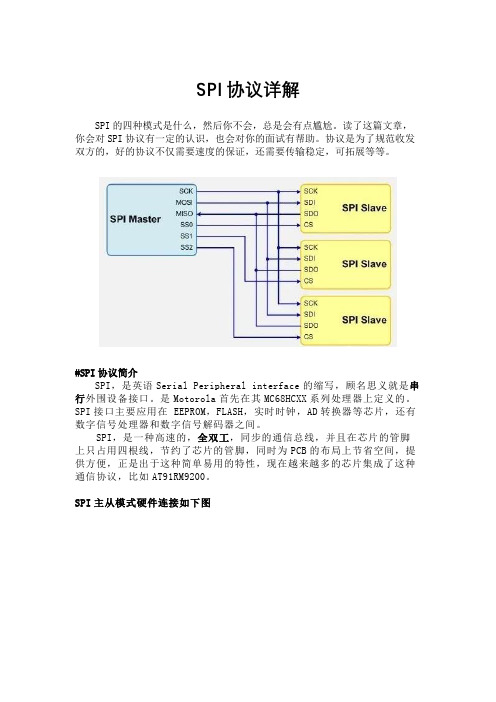
SPI协议详解
【转】SPI协议详解SPI总线协议及SPI时序图详解2009-11-10 22:10SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
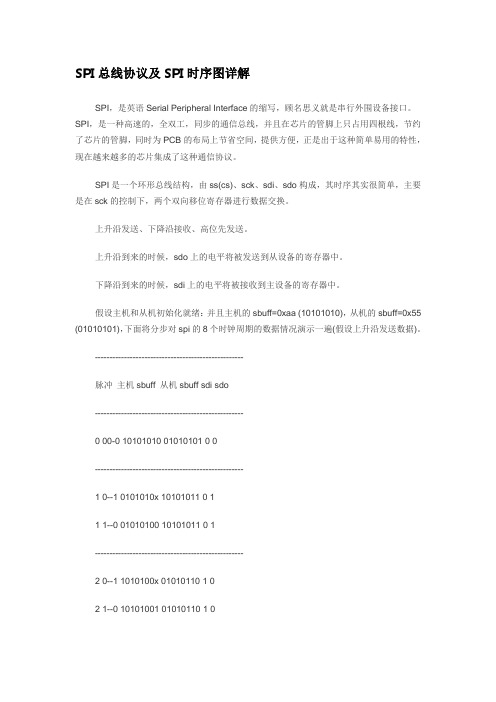
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。
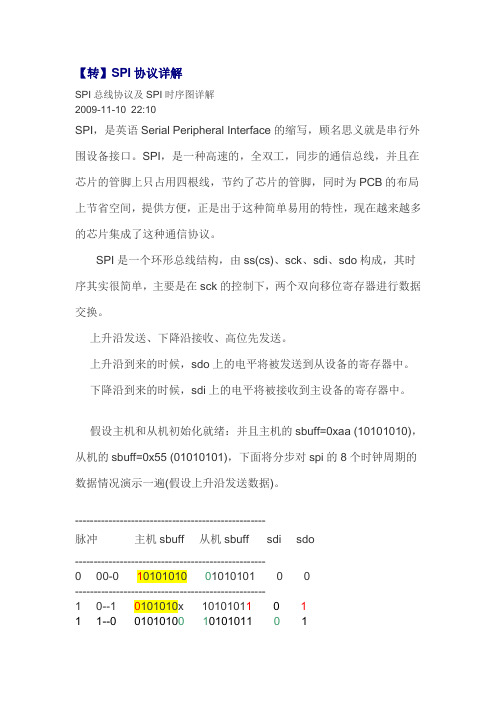
假设主机和从机初始化就绪:并且主机的sbuff=0xaa (10101010),从机的sbuff=0x55 (01010101),下面将分步对spi的8个时钟周期的数据情况演示一遍(假设上升沿发送数据)。
---------------------------------------------------脉冲主机sbuff 从机sbuff sdi sdo---------------------------------------------------0 00-0 10101010 01010101 0 0---------------------------------------------------1 0--1 0101010x 101010110 11 1--0 0101010010101011 0 1---------------------------------------------------2 0--1 1010100x 01010110 1 02 1--0 1010100101010110 10---------------------------------------------------3 0--1 0101001x 101011010 13 1--0 0101001010101101 0 1---------------------------------------------------4 0--1 1010010x 01011010 1 04 1--0 1010010101011010 10---------------------------------------------------5 0--1 0100101x 101101010 15 1--0 0100101010110101 0 1---------------------------------------------------6 0--1 1001010x 01101010 1 06 1--0 1001010101101010 10---------------------------------------------------7 0--1 0010101x 110101010 17 1--0 0010101011010101 0 1---------------------------------------------------8 0--1 0101010x 10101010 1 08 1--0 0101010110101010 10---------------------------------------------------这样就完成了两个寄存器8位的交换,上面的0--1表示上升沿、1--0表示下降沿,sdi、sdo相对于主机而言的。
SPI时钟模式的配置

S P I基础知识简介设备与设备之间通过某种硬件接口通讯;目前存在很多种接口;SPI接口是其中的一种..SPI中分Master主设备和Slave从设备;数据发送都是由Master控制..一个master可以接一个或多个slave..常见用法是一个Master接一个slave;只需要4根线:SCLK:SerialClock;串行时钟MISO:MasterInSlaveOut;主设备输入;从设备输出MOSI:MasterOutSlaveIn;主设备输出;从设备输入SS:SlaveSelect;选中从设备;片选SPI由于接口相对简单只需要4根线;用途算是比较广泛;主要应用在EEPROM;FLASH;实时时钟;AD转换器;还有数字信号处理器和数字信号解码器之间..即一个SPI的Master通过SPI与一个从设备;即上述的那些Flash;ADC等;进行通讯..而主从设备之间通过SPI进行通讯;首先要保证两者之间时钟SCLK要一致;互相要商量好了;要匹配;否则;就没法正常通讯了;即保证时序上的一致才可正常讯..而这里的SPI中的时钟和相位;指的就是SCLk时钟的特性;即保证主从设备两者的时钟的特性一致了;以保证两者可以正常实现SPI通讯..SPI相关的缩写或说法先简单说一下;关于SPI中一些常见的说法:SPI的极性Polarity和相位Phase;最常见的写法是CPOL和CPHA;不过也有一些其他写法;简单总结如下:1CKPOLClockPolarity=CPOL=POL=Polarity=时钟极性2CKPHAClockPhase=CPHA=PHA=Phase=时钟相位3SCK=SCLK=SPI的时钟4Edge=边沿;即时钟电平变化的时刻;即上升沿risingedge或者下降沿fallingedge对于一个时钟周期内;有两个edge;分别称为:Leadingedge=前一个边沿=第一个边沿;对于开始电压是1;那么就是1变成0的时候;对于开始电压是0;那么就是0变成1的时候;Trailingedge=后一个边沿=第二个边沿;对于开始电压是1;那么就是0变成1的时候即在第一次1变成0之后;才可能有后面的0变成1;对于开始电压是0;那么就是1变成0的时候;本文采用如下用法:极性=CPOL相位=CPHASCLK=时钟第一个边沿和第二个边沿SPI的相位和极性CPOL和CPHA;分别都可以是0或时1;对应的四种组合就是:Mode0CPOL=0;CPHA=0Mode1CPOL=0;CPHA=1Mode2CPOL=1;CPHA=0Mode3CPOL=1;CPHA=1CPOL极性先说什么是SCLK时钟的空闲时刻;其就是当SCLK在数发送8个bit比特数据之前和之后的状态;于此对应的;SCLK在发送数据的时候;就是正常的工作的时候;有效active的时刻了..先说英文;其精简解释为:ClockPolarity=IDLEstateofSCK..再用中文详解:SPI的CPOL;表示当SCLK空闲idle的时候;其电平的值是低电平0还是高电平1:CPOL=0;时钟空闲idle时候的电平是低电平;所以当SCLK有效的时候;就是高电平;就是所谓的active-high;CPOL=1;时钟空闲idle时候的电平是高电平;所以当SCLK有效的时候;就是低电平;就是所谓的active-low;CPHA相位首先说明一点;capturestrobe=latch=read=sample;都是表示数据采样;数据有效的时刻..相位;对应着数据采样是在第几个边沿edge;是第一个边沿还是第二个边沿;0对应着第一个边沿;1对应着第二个边沿..对于:CPHA=0;表示第一个边沿:对于CPOL=0;idle时候的是低电平;第一个边沿就是从低变到高;所以是上升沿;对于CPOL=1;idle时候的是高电平;第一个边沿就是从高变到低;所以是下降沿;CPHA=1;表示第二个边沿:对于CPOL=0;idle时候的是低电平;第二个边沿就是从高变到低;所以是下降沿;对于CPOL=1;idle时候的是高电平;第一个边沿就是从低变到高;所以是上升沿;此处;再多解释一下可能会遇到的CKP和CKE;其是Microchip的PIC系列芯片中的说法.. 1CKP是ClockPolaritySelect;就是极性=CPOL:CKP;虽然名字和CPOL不一样;但是都是指时钟相位的选择;定义也一样:CKP:ClockPolaritySelectbit1=IdlestateforclockCKisahighlevel0=IdlestateforclockCKisalowlevel所以不多解释..2CKE是ClockEdgeSelect;就是相位=CPHA:CKE:SPIClockEdgeSelectbit1=TransmitoccursontransitionfromactivetoIdleclockstate0=TransmitoccursontransitionfromIdletoactiveclockstate意思是1=数据传输发生在时钟从有效状态转到空闲状态的那一时刻0=数据传输发生在时钟从空闲状态转到有效状态的那一时刻其中;数据传输的时刻;即图中标出的“数据transmit传输的时刻”;很明显;该时刻是一个时钟和下一个时钟之间交界的地方;对应的不论是上升沿还是下降沿;都与我们前面提到的CPHA=数据采样的时刻;的边沿方向所相反..所以;此处的CKE;正好与CPHA相反..所以;CKP和CKE所对应的取值的含义为:WhenCKP=0:CKE=1=>DatatransmittedonrisingedgeofSCKCKE=0=>DatatransmittedonfallingedgeofSCKWhenCKP=1:CKE=1=>DatatransmittedonfallingedgeofSCKCKE=0=>DatatransmittedonrisingedgeofSCK如何看懂和记忆CPOL和CPHA所以;关于在其他地方介绍的;看似多么复杂难懂难记忆的CPOL和CPHA;其实经过上面解释;就肯容易看懂了:去看时序图;如果起始的始终SCLK的电平是0;那么CPOL=0;如果是1;那么CPOL=1;然后看数据采样时刻;即时序图数据线上的数据那个矩形区域的中间所对应的位置;对应到上面SCLK时钟的位置;对应着是第一个边沿或是第二个边沿;即CPHA是0或1..对应的是上升沿还是还是下降沿;要根据对应的CPOL的值;才能确定..即:1如何判断CPOL:SCLK的空闲时候的电压;是0还是1;决定了CPOL是0还是1;2如何判断CPHA:而数据采样时刻对应着的SCLK的电平;是第一个边沿还是第二个边沿;对应着CPHA为0还是1..SCLK的极性;相位;边沿之间的内在逻辑关系SCLK空闲时刻电压低电平CPOL=0高电平CPOL=1数据采样时刻;SCLK的edge是第一个还是第二个第一个边沿CPHA=0上升沿开始的电平是低电压0;而第一个边沿;只能是从0变到1;即上升沿下降沿第二个边沿CPHA=1下降沿上升沿开始电平是高电平1;第二个边沿;肯定是从低电平0变到高电平1;因为第一个边沿肯定是从高电平1;变到低电平0软件中如何设置SPI的极性和相位SPI分主设备和从设备;两者通过SPI协议通讯..而设置SPI的模式;是从设备的模式;决定了主设备的模式..所以要先去搞懂从设备的SPI是何种模式;然后再将主设备的SPI的模式;设置和从设备相同的模式;即可正常通讯..对于从设备的SPI是什么模式;有两种:1固定的;有SPI从设备硬件决定的SPI从设备;具体是什么模式;相关的datasheet中会有描述;需要自己去datasheet中找到相关的描述;即:关于SPI从设备;在空闲的时候;是高电平还是低电平;即决定了CPOL是0还是1;然后再找到关于设备是在上升沿还是下降沿去采样数据;这样就是;在定了CPOL的值的前提下;对应着可以推算出CPHA是0还是1了..举例1:CC2500-Low-CostLow-Power2.4GHzRFTransceiver的datasheet中SPI的时序图从图中可以看到;最开始的SCLK和结束时候的SCLK;即空闲时刻的SCLK;是低电平;推导出CPOL=0;然后可以看到数据采样的时候;即数据最中间的那一点;对应的是SCLK的第一个边沿;所以CPHA=0此时对应的是上升沿..举例2:SSD1289-240RGBx320TFTLCDControllerDriver的datasheet中提到:“SDIisshiftedinto8-bitshiftregisteroneveryrisingedgeofSCKintheorderofdatabit7 ;databit6……databit0.”意思是;数据是在上升沿采样;所以可以断定是CPOL=0;CPHA=0;或者CPOL=1;CPHA=1的模式;但是至于是哪种模式..按理来说;接下来应该再去确定SCLK空闲时候是高电平还是低电平;用以确定CPOL是0还是1;但是datasheet中没有提到这点..所以;此处;目前不太确定;是两种模式都支持;还是需要额外找证据却确定CPOL是0还是1. 2可配置的;由软件自己设定从设备也是一个SPI控制器;4种模式都支持;此时只要自己设置为某种模式即可..然后知道了从设备的模式后;再去将SPI主设备的模式;设置为和从设备模式一样;即可..对于如何配置SPI的CPOL和CPHA的话;不多细说;多数都是直接去写对应的SPI控制器中对应寄存器中的CPOL和CPHA那两位;写0或写1即可..举例:此处遇到的C8051F347中的SPI就是一个SPI的controller控制器;即支持软件配置CPOL 和CPHA的值;四种模式都支持;此处C8051F347作为SPI从设备;设置了CPOL=1;CPHA=0的模式;因此;此处对应主芯片BlackfinF537中的SPI控制器;作为Master主设备;其SPI的模式也要设置为CPOL=1;CPHA=0..待解决问题对于软件去如何设置主设备和从设备的CPOL和CPHA的值;是搞懂了;知道两者要匹配才可以正常通讯;但是对于CPOL和CPHA这四种模式;不同的模式之间;相对来说有何优缺点;比如是否哪种模式更稳定;数据更不容易出错等等;还是不清楚总结1.IT方面的资料;国内的;还是把问题讲明白的太少;想搞懂问题;还是得去找英文的..2.有问题;指望别人;还是不行的;凡事还是得指望自己;才有用..。
[Note][Aurix2G_TC397_MCAL]SPI相关配置
![[Note][Aurix2G_TC397_MCAL]SPI相关配置](https://img.taocdn.com/s3/m/9f26e9a81b37f111f18583d049649b6648d7090d.png)
[Note][Aurix2G_TC397_MCAL]SPI相关配置0 SPI1 General1.1 SpiDriverSpiSystemClock在MCU模块配置的系统时钟。
主要参考McuQSPIFrequency和McuQspiClockSourceSelection1.2 Spi GeneralSpiCancelApi默认是禁⽤的SpiChannelBuffersAllowed (0 -> 2)⽤户可以决定采⽤哪⼀个buffer0:内部buffer1:外部buffer2:内部外部都可以默认是外部bufferSpiInitDeInitApiMode默认选择 SPI_MCAL_SUPERVISOR,因为driver的代码⼤多在supervisor下运⾏的SpiMulticoreCheckEnable多核检查是否开启。
我理解是看driver是否是在单核还是多核上运⾏。
SpiInitCheckApi默认关闭,如果APP有安全⽅⾯的需求和功能,则打开。
SpiRuntimeApiMode决定运⾏时,采⽤什么模式。
默认是SPI_MCAL_SUPERVISOR,理由同上。
SpiDevErrorDetect决定开发时错误是否被检测。
也就是DET。
在debug的时候默认打开。
SpiSafetyCheckEnable是否开启安全检查。
默认关闭,但是如果APP有安全⽅⾯的要求,必须打开。
SpiHwStatusApi决定 API Spi_GetHWUnitStatus是否启⽤。
主要决定,是否app需要了解硬件的状态。
SpiInterruptibleSeqAllowed默认关闭。
决定是否可以中断序列。
只有在SPI level 1or2时才有⽤。
SpiLevelDelivered决定启⽤什么通讯驱动。
1. L0:同步传输,也就是不适⽤DMA⽅式,只是采⽤CPU。
2. L1:异步传输,采⽤DMA⽅式。
3. L2:同时启⽤DMA和CPU两种⽅式。
spi工作原理

spi工作原理
SPI(Serial Peripheral Interface)是一种同步串行通信接口,用于在芯片之间传输数据。
它由主设备(Master)和从设备(Slave)组成,主设备控制通信的时钟信号,并发送和接收
数据。
SPI工作原理如下:
1. 时钟信号同步:SPI使用时钟信号将主设备和从设备保持同步。
主设备产生时钟信号,从设备根据时钟信号进行数据传输。
2. 主从选择:主设备通过选择特定的从设备使其处于工作模式。
可以通过片选引脚(Slave Select,SS)来选择从设备。
3. 数据传输:主设备发送一个数据位到从设备,从设备接收并响应主设备发送的数据位。
数据在时钟的上升沿或下降沿进行传输。
4. 数据帧:SPI通信以数据帧为基本传输单位。
数据帧由一个
数据位和可能的附加控制位组成。
数据位可以是单向的(只能由主设备发送)或双向的(主从设备都可以发送和接收)。
5. 传输模式:SPI支持多种传输模式,如CPOL(Clock Polarity)和CPHA(Clock Phase)。
CPOL决定时钟信号在空
闲状态时的电平,CPHA决定数据采样的时机。
6. 传输速率:SPI的传输速率由时钟信号的频率决定。
一般来说,SPI的传输速率比较高,可以达到几十兆赫兹甚至上百兆
赫兹。
需要注意的是,SPI是一种点对点的通信接口,每次传输只能有一个主设备和一个从设备进行通信。
如果需要与多个设备进行通信,需要使用多个SPI接口或者使用其他的通信协议。
spi工作模式

spi工作模式SPI(Serial Peripheral Interface)是一种同步串行数据总线,它是一种简单而高效的通信协议,常用于连接微控制器和外部设备,如传感器、存储器、显示屏等。
SPI工作模式是一种全双工的通信模式,它通过四根线进行通信,包括时钟线(SCLK)、数据输入线(MISO)、数据输出线(MOSI)和片选线(SS)。
SPI工作模式的时序图如下所示:在SPI通信中,主设备负责产生时钟信号,并通过片选线选择从设备。
主设备通过MOSI线发送数据给从设备,在同一时钟周期内,从设备也通过MISO线返回数据给主设备。
因此,SPI是一种全双工的通信方式,能够实现双向数据传输。
SPI通信的速度取决于时钟频率和数据传输的位数。
在SPI工作模式中,时钟信号的频率是可调的,可以根据实际需求进行设置。
一般来说,SPI的时钟频率可以达到几十MHz甚至上百MHz,因此具有较高的数据传输速度。
SPI通信的片选线(SS)用于选择从设备。
在多个从设备的情况下,主设备可以通过片选线选择要和其通信的从设备,其他从设备则处于非选中状态。
这样就可以实现多个从设备和一个主设备之间的通信,提高了系统的灵活性和可扩展性。
SPI通信具有较低的硬件成本,因为它只需要四根线就可以实现双向数据传输。
这使得SPI在嵌入式系统中得到广泛应用,例如单片机和外围设备之间的通信、传感器和控制器之间的数据传输等。
总的来说,SPI工作模式是一种简单而高效的通信方式,具有较高的数据传输速度和较低的硬件成本。
它在嵌入式系统中得到了广泛的应用,为微控制器和外部设备之间的通信提供了一种可靠的解决方案。
希望本文对SPI工作模式有所了解,并能在实际应用中发挥作用。
SPI时钟模式的配置

S P I时钟模式的配置 The latest revision on November 22, 2020【S P I基础知识简介】设备与设备之间通过某种硬件接口通讯,目前存在很多种接口,SPI接口是其中的一种。
SPI中分Master主设备和Slave从设备,数据发送都是由Master控制。
一个master可以接一个或多个slave。
常见用法是一个Master接一个slave,只需要4根线:SCLK:SerialClock,(串行)时钟MISO:MasterInSlaveOut,主设备输入,从设备输出MOSI:MasterOutSlaveIn,主设备输出,从设备输入SS:SlaveSelect,选中从设备,片选SPI由于接口相对简单(只需要4根线),用途算是比较广泛,主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
即一个SPI的Master通过SPI与一个从设备,即上述的那些Flash,ADC等,进行通讯。
而主从设备之间通过SPI进行通讯,首先要保证两者之间时钟SCLK要一致,互相要商量好了,要匹配,否则,就没法正常通讯了,即保证时序上的一致才可正常讯。
而这里的SPI中的时钟和相位,指的就是SCLk时钟的特性,即保证主从设备两者的时钟的特性一致了,以保证两者可以正常实现SPI通讯。
【SPI相关的缩写或说法】先简单说一下,关于SPI中一些常见的说法:SPI的极性Polarity和相位Phase,最常见的写法是CPOL和CPHA,不过也有一些其他写法,简单总结如下:(1)CKPOL(ClockPolarity)=CPOL=POL=Polarity=(时钟)极性(2)CKPHA(ClockPhase)=CPHA=PHA=Phase=(时钟)相位(3)SCK=SCLK=SPI的时钟(4)Edge=边沿,即时钟电平变化的时刻,即上升沿(risingedge)或者下降沿(fallingedge)对于一个时钟周期内,有两个edge,分别称为:Leadingedge=前一个边沿=第一个边沿,对于开始电压是1,那么就是1变成0的时候,对于开始电压是0,那么就是0变成1的时候;Trailingedge=后一个边沿=第二个边沿,对于开始电压是1,那么就是0变成1的时候(即在第一次1变成0之后,才可能有后面的0变成1),对于开始电压是0,那么就是1变成0的时候;本文采用如下用法:极性=CPOL相位=CPHASCLK=时钟第一个边沿和第二个边沿【SPI的相位和极性】CPOL和CPHA,分别都可以是0或时1,对应的四种组合就是:Mode0CPOL=0,CPHA=0Mode1CPOL=0,CPHA=1Mode2CPOL=1,CPHA=0Mode3CPOL=1,CPHA=1【CPOL极性】先说什么是SCLK时钟的空闲时刻,其就是当SCLK在数发送8个bit比特数据之前和之后的状态,于此对应的,SCLK在发送数据的时候,就是正常的工作的时候,有效active的时刻了。
SPI-4接口的时钟方案
SPI-4接口的时钟方案
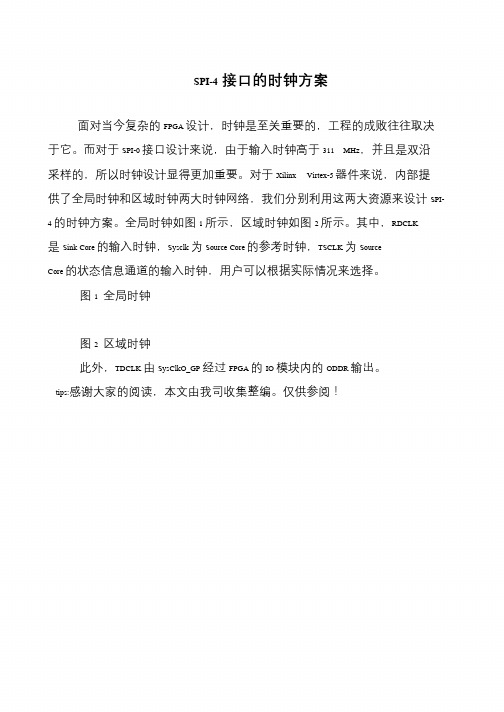
面对当今复杂的FPGA 设计,时钟是至关重要的,工程的成败往往取决
于它。
而对于SPI-0 接口设计来说,由于输入时钟高于311 MHz,并且是双沿
采样的,所以时钟设计显得更加重要。
对于Xilinx Virtex-5 器件来说,内部提
供了全局时钟和区域时钟两大时钟网络,我们分别利用这两大资源来设计SPI-
4 的时钟方案。
全局时钟如图1 所示,区域时钟如图2 所示。
其中,RDCLK
是Sink Core 的输入时钟,Sysclk 为Source Core 的参考时钟,TSCLK 为Source Core 的状态信息通道的输入时钟,用户可以根据实际情况来选择。
图1 全局时钟
图2 区域时钟
此外,TDCLK 由SysClkO_GP 经过FPGA 的IO 模块内的ODDR 输出。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
spi时序图怎么看?spi时序图详解分析
spi时序图怎么看?spi时序图详解分析https:///is/ecFhoa5/我做产品的时候,最怕就是做IIC和SPI的通信。
这两种协议时序哪怕是延时时间有误差,都有可能导致通信不上。
出现问题的时候,如果没设备也很难排查问题到底出在哪⾥。
有时候这个产品写好的时序程序,换⼀个单⽚机⽤同⼀个程序移植过去就不⾏了。
⽽且很多公司都没有设备可以调试这些协议,⼤多数时候都是完全靠蒙。
今天就拿新⼿⽐较头痛的SPI来进⾏时序图的分析和讲解,看不懂你打我!我记得第⼀次SPI通讯的时候,完全是照抄⽹络上的程序,因为芯⽚⼿册的时序图看起来太可怕了,根本看不懂。
后⾯各种模拟时序写多了,才有了经验,然后⽤经验去理解数据⼿册以及⽹络上的教程。
很多新⼿看各种数据⼿册和教程被吓到了,其实很多时候不是你的问题,⽽是数据⼿册和教程写得太学术化了。
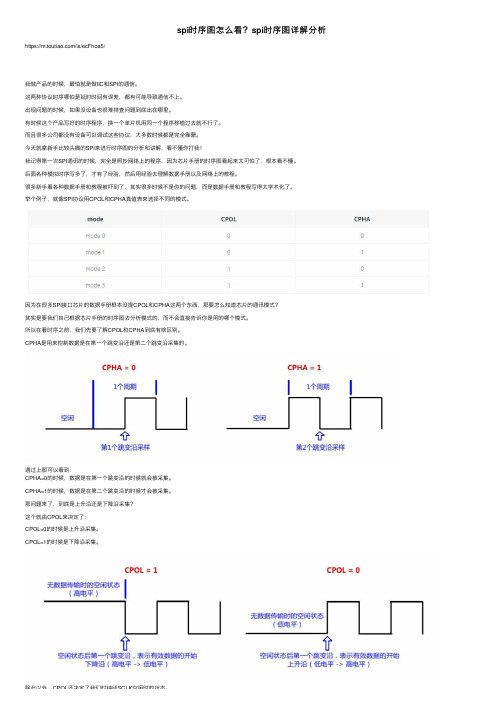
举个例⼦,就像SPI协议⽤CPOL和CPHA真值表来选择不同的模式。
因为在很多SPI接⼝芯⽚的数据⼿册根本没提CPOL和CPHA这两个东西,那要怎么知道芯⽚的通讯模式?其实是要我们⾃⼰根据芯⽚⼿册的时序图去分析模式的,⽽不会直接告诉你是⽤的哪个模式。
所以在看时序之前,我们先要了解CPOL和CPHA到底有啥区别。
CPHA是⽤来控制数据是在第⼀个跳变沿还是第⼆个跳变沿采集的。
通过上图可以看到:CPHA=0的时候,数据是在第⼀个跳变沿的时候就会被采集。
CPHA=1的时候,数据是在第⼆个跳变沿的时候才会被采集。
那问题来了,到底是上升沿还是下降沿采集?这个就由CPOL来决定了:CPOL=0的时候是上升沿采集。
CPOL=1的时候是下降沿采集。
除此以外,CPOL还决定了我们时钟线SCLK空闲时的状态。
除此以外,CPOL还决定了我们时钟线SCLK空闲时的状态。
CPOL=0的时候表⽰SCLK在空闲时为低电平。
CPOL=1的时候表⽰SCLK在空闲时为⾼电平。
Ok,明⽩了这个,我们再分析4种模式的时序图。
1. 模式0(CPOL=0 CPOL=0)CPOL = 0:时钟线空闲时是低电平,第1个跳变沿是上升沿,第2个跳变沿是下降沿CPHA = 0:数据在第1个跳变沿(上升沿)采样时序图如下:2.模式1(CPOL=0 CPOL=1)CPOL = 0:空闲时是低电平,第1个跳变沿是上升沿,第2个跳变沿是下降沿CPHA = 1:数据在第2个跳变沿(下降沿)采样时序图如下:3.模式2(CPOL=1 CPOL=0)CPOL = 1:空闲时是⾼电平,第1个跳变沿是下降沿,第2个跳变沿是上升沿CPHA = 0:数据在第1个跳变沿(下降沿)采样时序图如下:4.模式3(CPOL=1 CPOL=1)CPOL = 1:空闲时是⾼电平,第1个跳变沿是下降沿,第2个跳变沿是上升沿CPHA = 1:数据在第2个跳变沿(上升沿)采样时序图如下:这样看是不是对4种模式的区别⽐较清晰了?下⾯,我们再拿OLED的驱动芯⽚SSD1306的时序图来作为实战讲解。
单片机技术应用 SPI简介

SPI一、SPI简介SPI(Serial Peripheral Interface )是串行外围接口设备,是一种高速的,全双工,同步的通信总线,并且在芯片上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是处于这种简单易用的特性,现在越来越多的芯片集成了这种协议。
SPI 是一个环形总线结构,由ss(cs)、sck、sdi、sdo 构成,其时序其实很简单,主要是在sck 的控制下,两个双向移位寄存器进行数据交换。
因为是全双工同步通信,所以在传输数据时,左边主机的数据从移位寄存器进入MOSI线上进入右边的从机,并存入最低位,同时从机的最高位通过MISO传输到主机的最低位,当第二位数据进行发送时,最低位的数据会向左移一位并将新数据存入最低位。
二、通信协议1、物理层motorola公司首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave 模式应用,一般仅支持单Master(单主机模式)。
管脚三线SPI:SCLK(时钟线),MISO(主机接收从机发送),MOSI(主机发送从机接收)四线SPI:CS(片选线),SCLK,MISO,MOSI片选:被选,确定该设备处于何种工作模式连接方式2、数据链路层SPI采用位协议,------高位在前,低位在后SPI有四种工作模式,SPI0 SPI1 SPI2 SPI3SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI时钟模式的配置

SPI时钟模式的配置SPI(Serial Peripheral Interface)时钟模式是指在SPI通信中,时钟信号的工作模式。
SPI是一种同步的串行通信协议,在通信过程中,数据的传输是由时钟信号来驱动的。
不同的时钟模式可以定义时钟信号的相位和极性,以适应不同的通信需求。
时钟信号的相位(Clock Phase)定义了数据采样的时机,即在时钟信号的何处取样数据。
时钟信号的极性(Clock Polarity)定义了数据的有效电平是高电平还是低电平。
SPI协议中常用的时钟模式有四种,分别是Mode 0、Mode 1、Mode 2和Mode 3、以下是各个时钟模式的具体配置及特点:1. Mode 0:-时钟极性(CPOL):0-时钟相位(CPHA):0-特点:时钟信号在空闲状态为低电平,数据在时钟的下降沿采样,即数据在时钟信号的前半个周期准备好。
2. Mode 1:-时钟极性(CPOL):0-时钟相位(CPHA):1-特点:时钟信号在空闲状态为低电平,数据在时钟的上升沿采样,即数据在时钟信号的后半个周期准备好。
3. Mode 2:-时钟极性(CPOL):1-时钟相位(CPHA):0-特点:时钟信号在空闲状态为高电平,数据在时钟的上升沿采样。
4. Mode 3:-时钟极性(CPOL):1-时钟相位(CPHA):1-特点:时钟信号在空闲状态为高电平,数据在时钟的下降沿采样。
SPI的时钟模式需要根据具体的通信需求来配置。
通常在SPI设备的Datasheet中会指定默认的时钟模式,开发者需要根据SPI设备的要求来配置相应的时钟模式。
时钟模式的选择取决于设备的工作方式和通信时序的要求。
例如,如果SPI设备在时钟信号的上升沿将数据放置到总线上并在下降沿进行采样,则应选择Mode 0或Mode 2、如果设备在下降沿将数据放置到总线上并在上升沿进行采样,则应选择Mode 1或Mode 3。
SPI四种模式区别资料

S P I四种模式区别spi四种模式SPI的相位(CPHA)和极性(CPOL)分别可以为0或1,对应的4种组合构成了SPI的4种模式(mode)Mode 0 CPOL=0, CPHA=0Mode 1 CPOL=0, CPHA=1Mode 2 CPOL=1, CPHA=0Mode 3 CPOL=1, CPHA=1时钟极性CPOL: 即SPI空闲时,时钟信号SCLK的电平(1:空闲时高电平; 0:空闲时低电平)时钟相位CPHA: 即SPI在SCLK第几个边沿开始采样(0:第一个边沿开始; 1:第二个边沿开始)sd卡地spi常用的是mode 0 和mode 3,这两种模式的相同的地方是都在时钟上升沿采样传输数据,区别这两种方式的简单方法就是看空闲时,时钟的电平状态,低电平为mode 0 ,高电平为mode 3。
OverviewThe SPI standard includes four modes, defined by the polarity of SCLK and the phase relationship between data and SCLK. The clock polarity (CPOL) is determined by the idle state of SCLK. If the idle state is low, CPOL is 0. If the idle state is high, CPOL is 1. The clock phase (CPHA) is determined by which edge that data is valid. If the data is valid on the first edge of SCLK, CPHA is 0. If the data is valid on the second edge of SCLK, CPHA is 1.Industry has two common formats to define the four SPI modes. The first format defines the four possible combinations of phase and polarity as mode 0, mode 1, mode 2, and mode 3. The second format defines the combinations as mode 0,0, mode 0,1, mode 1,0, and mode 1,1. The SPI master must use a mode supported by the slave device to allow proper communications.Dallas Semiconductor/Maxim's SPI-interface RTCs support both SCLK polarities. The RTC automatically determines the polarity by detecting the idle state of SCLK when CE is asserted. The master must, therefore, place SCLK in the proper idle state before CE is asserted. Only one phase is supported. Since two SCLK polarities are supported, two of the four SPI modes are supported by the RTCs: modes 1 and 3 (mode 0,1 and mode 1,1).On microcontrollers with built-in SPI interfaces, an SPI control or configuration register will have bits that control the polarity and phase. Because the RTC supports either polarity, the polarity can be set as desired. The phase bit, however, must be set properly, or the RTC will not operate correctly.Figure 1 shows a typical single-byte read and Figure 2 shows a typical single-byte write. Each time CE is asserted, the first eight SCLK pulses are used to clock in a command byte. The command byte consists of several bits that define a register address, and one bit thatdefines the data direction: a write if the next eight SCLK pulses will clock data into the part, or a read if data is clocked out of the part. Additional groups of eight SCLK pulses continue to transfer data in the selected direction until CE is deasserted.Note: In burst mode, CE is kept high and additional SCLK cycles are sent until the end of the burst.Figure 1. Single-byte read.Note: In burst mode, CE is kept high and additional SCLK cycles are sent until the end of the burst.Figure 2. Single-byte write.Examples of SPI code are available at: Real-Time ClocksSummaryThe information in this application note will help ensure that SPI communication routines will function correctly.。
SPI接口使用简介
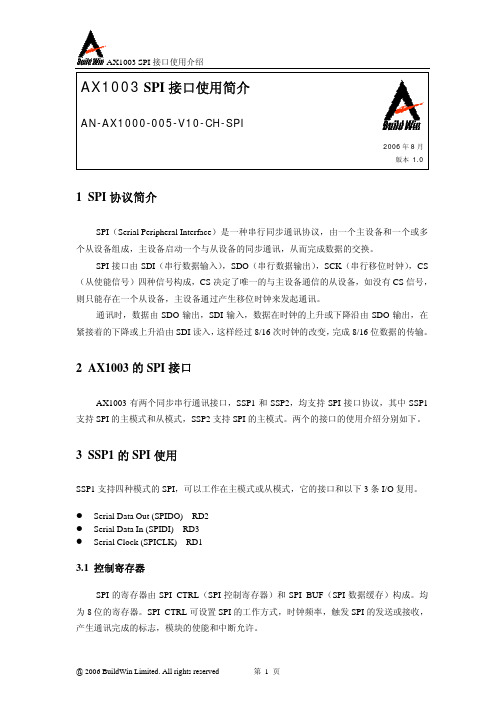
AX1003 SPI接口使用简介AN-AX1000-005-V10-CH-SPI2006年8月版本 1.0 1 SPI协议简介SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS (从使能信号)四种信号构成,CS决定了唯一的与主设备通信的从设备,如没有CS信号,则只能存在一个从设备,主设备通过产生移位时钟来发起通讯。
通讯时,数据由SDO输出,SDI输入,数据在时钟的上升或下降沿由SDO输出,在紧接着的下降或上升沿由SDI读入,这样经过8/16次时钟的改变,完成8/16位数据的传输。
2 AX1003的SPI接口AX1003有两个同步串行通讯接口,SSP1和SSP2,均支持SPI接口协议,其中SSP1支持SPI的主模式和从模式,SSP2支持SPI的主模式。
两个的接口的使用介绍分别如下。
3 SSP1的SPI使用SSP1支持四种模式的SPI,可以工作在主模式或从模式,它的接口和以下3条I/O复用。
Serial Data Out (SPIDO) – RD2Serial Data In (SPIDI) – RD3Serial Clock (SPICLK) – RD13.1 控制寄存器SPI的寄存器由SPI_CTRL(SPI控制寄存器)和SPI_BUF(SPI数据缓存)构成。
均为8位的寄存器。
SPI_CTRL可设置SPI的工作方式,时钟频率,触发SPI的发送或接收,产生通讯完成的标志,模块的使能和中断允许。
3.2 工作模式设置SPI的工作模式由SPI_CTRL的SPIEDGE和SPIIDST来设置,可配置成四种模式,其信号时序如图 3-1所示。
SPIIDST = 0,SPIEDGE = 0 时钟(SPICLK)在空闲时为低电平,在下降沿时采样SPIIDST = 0,SPIEDGE = 1 时钟(SPICLK)在空闲时为低电平,在上升沿时采样SPIIDST = 1,SPIEDGE = 0 时钟(SPICLK)在空闲时为高电平,在上升沿时采样SPIIDST = 1,SPIEDGE = 1 时钟(SPICLK)在空闲时为高电平,在下降沿时采样3.3 时钟频率设置SPI工作在主模式时需设置其时钟频率,可由SPI_CTRL的SPIFRQ来配置,可选择由系统时钟的64/16/4分频,或Timer2溢出时间的2分频来产生SPI的时钟。
思泰克spi编程程序流程

思泰克spi编程程序流程1、概述SPI是Serial Perripheral Interface的简称,是由Motorola 公司推出的一种高速、全双工的总线协议。
SPI也是采用主从方式工作,一般由**SCLK(时钟线)、CS(片选信号)、MOSI(主机输出,从机输入),MISO(主机输入,从机输出)**四根线组成,当有多个从机存在时,主机就需要多个CS信号引脚,每个CS引脚信号对应一个从机,主机可以通过相应的CS来选择要控制的从机设备。
SCLK、MOSI,MISO这三根线都是公用的,唯有片选信号线(CS)是和从机一一对应的。
SPI通信主从机接线图2、四种工作模式根据SPI时钟极性(CPOL)和时钟相位(CPHA)配置的不同可分为4种模式。
1、CPOL = 1:表示SCLK时钟信号空闲时是高电平;CPHA = 0:表示从第一个跳变沿开始采样;在这里插入图片描述2、CPOL = 1:表示SCLK时钟信号空闲时是高电平;CPHA = 1:表示从第二个跳变沿开始采样;3、CPOL = 0:表示SCLK时钟信号空闲时是低电平;CPHA = 0:表示从第一个跳变沿开始采样;在这里插入图片描述4、CPOL = 0:表示SCLK时钟信号空闲时是低电平;CPHA = 1:表示从第二个跳变沿开始采样;在这里插入图片描述3、数据交换SPI 设备间的数据传输之所以又被称为数据交换,是因为SPI 协议规定一个SPI 设备不能在数据通信过程中仅仅只充当一个“发送者(Transmitter)” 或者“接收者(Receiver)”。
SPI是全双工通信,所以发送和接收是同时进行的。
在每个 Clock 周期内,SPI 设备都会发送并接收一个bit 大小的数据(不管主设备还是从设备),相当于该设备有一个 bit 大小的数据被交换了。
一个 Slave 设备要想能够接收到 Master 发过来的控制信号,必须在此之前能够被 Master 设备进行访问 (Access)。
SPI总线协议及SPI时序图详解
SPI总线协议及SPI时序图详解SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。
假设主机和从机初始化就绪:并且主机的sbuff=0xaa (10101010),从机的sbuff=0x55 (01010101),下面将分步对spi的8个时钟周期的数据情况演示一遍(假设上升沿发送数据)。
---------------------------------------------------脉冲主机sbuff 从机sbuff sdi sdo---------------------------------------------------0 00-0 10101010 01010101 0 0---------------------------------------------------1 0--1 0101010x 10101011 0 11 1--0 01010100 10101011 0 1---------------------------------------------------2 0--1 1010100x 01010110 1 02 1--0 10101001 01010110 1 0---------------------------------------------------3 0--1 0101001x 10101101 0 13 1--0 01010010 10101101 0 1---------------------------------------------------4 0--1 1010010x 01011010 1 04 1--0 10100101 01011010 1 0---------------------------------------------------5 0--1 0100101x 10110101 0 15 1--0 01001010 10110101 0 1---------------------------------------------------6 0--1 1001010x 01101010 1 06 1--0 10010101 01101010 1 0---------------------------------------------------7 0--1 0010101x 11010101 0 17 1--0 00101010 11010101 0 1---------------------------------------------------8 0--1 0101010x 10101010 1 08 1--0 01010101 10101010 1 0---------------------------------------------------这样就完成了两个寄存器8位的交换,上面的0--1表示上升沿、1--0表示下降沿,sdi、sdo相对于主机而言的。
SPI4种工作模式
第4页共9页
和光同尘
/**********************************************
* mode 0
写数据
***********************************************/
#if _CPOL==0&&_CPHA==0
//MODE 0 0
void SPI_Wirte_Data(unsigned char dat)
和光同尘
SPI4 种工作模式
/******************************************************************************
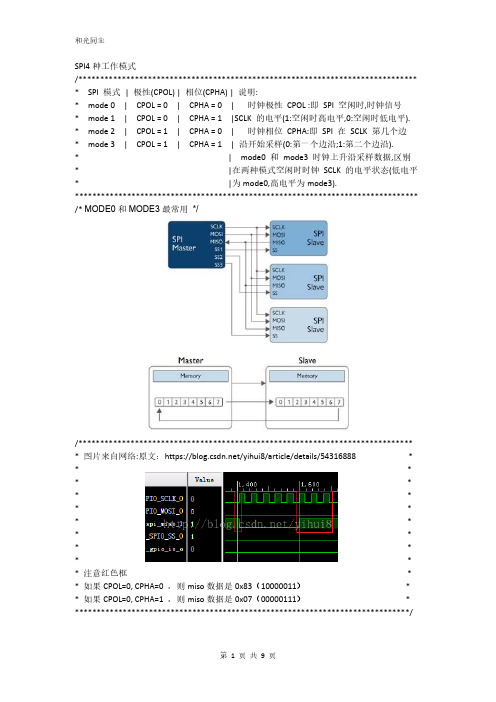
* SPI 模式 | 极性(CPOL) | 相位(CPHA) | 说明:
* mode 0 | CPOL = 0 | CPHA = 0 | 时钟极性 CPOL :即 SPI 空闲时,时钟信号
{
SPI_SCK_D(1);
if(dat&0x80)SPI_MOSI_D(1);
else SPI_MOSI_D(0);
dat<<=1;
SPI_SCK_D(0);
}
SPI_SCK_D(1);
}/*end of ‘SPI_Wirte_Data()’ part.*/
/*********************************************
#define MISO_I() (PINA&0X04)
void delay(void) {
unsigned char m,n; for(n=0;n<5;n++) {
for(m=0;m<100;m++); } }
SPI工作模式的设置

SPI⼯作模式的设置SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串⾏外围设备接⼝。
SPI,是⼀种⾼速的,全双⼯,同步的通信总线,并且在芯⽚的管脚上只占⽤四根线,节约了芯⽚的管脚,同时为PCB的布局上节省空间,提供⽅便,正是出于这种简单易⽤的特性,现在越来越多的芯⽚集成了这种通信协议。
其⼯作模式有两种:主模式和从模式,⽆论那种模式,都⽀持3Mbit/s的速率,并且还具有传输完成标志和写冲突保护标志。
跟SPI密切相关的两个概念是时钟极性和时钟相位。
时钟极性:表⽰时钟信号在空闲时是⾼电平还是低电平。
时钟相位:决定数据是在SCK的上升沿采样还是在SCK的结束沿采样。
下⾯以矩⼒的7022B芯⽚为例⼦,分析SPI⼯作模式的设置。
在7022B的数据⼿册中,指出:在SCK的上升沿放数据,在下降沿取数据。
在SCK的下降沿将DIN的数据采样到7022B中,在SCK的上升沿将7022B的数据放置在DOUT上⾯输出。
下⾯是模拟SPI总线对7022B进⾏读取的例⼦,这个例⼦⽣动表⽰了何时放数据,何时采样数据。
unsigned long Read_reg3(unsigned char cmd){int i;unsigned long data;set_bit(SPI_PORT,SPI_SS);clr_bit(SPI_PORT,SPI_SCK);clr_bit(SPI_PORT,SPI_SS);for(i=0;i<8;i++){set_bit(SPI_PORT,SPI_SCK);if(cmd&0x80){set_bit(SPI_PORT,SPI_MOSI);}else{clr_bit(SPI_PORT,SPI_MOSI);}cmd=cmd<<1;nop;nop;clr_bit(SPI_PORT,SPI_SCK);nop;}clr_bit(SPI_PORT,SPI_SCK);_delay_us(3);data=0;for(i=0;i<24;i++){set_bit(SPI_PORT,SPI_SCK);nop;nop;nop;if(PINB&(1{data+=1;}else{data+=0;}data=data<<1;nop;clr_bit(SPI_PORT,SPI_SCK);}set_bit(SPI_PORT,SPI_SS);return data;}如果采⽤硬件SPI,则需要对单⽚机(ATMEGA16)SPI寄存器进⾏设置,本例⼦中,需要设置SPCR=0x57;//MSB在先01010011时钟极性为0,因为空闲时CLK电平为低。
四线SPI通信基本知识,以及菊花链模式
四线SPI通信基本知识,以及菊花链模式今天分享的主要内容是来自于ADI公司的SPI知识学习,SPI算是嵌入式开发中最常用的通信方式之一,而大部分嵌入式软件工程师常常更关注于上层软件的开发,容易忘却底层的一些信号格式等,而一旦通信发生点啥问题,往往那是一个措手不及,所以文本作为SPI 接口的重温与巩固是再合适不过了。
串行外设接口(SPI)是微控制器和外围IC(如传感器、ADC、DAC、移位寄存器、SRAM等)之间使用最广泛的接口之一。
本文先简要说明SPI接口,然后介绍ADI公司支持SPI的模拟开关与多路转换器,以及它们如何帮助减少系统电路板设计中的数字GPIO数量。
SPI是一种同步、全双工、主从式接口。
来自主机或从机的数据在时钟上升沿或下降沿同步。
主机和从机可以同时传输数据。
SPI接口可以是3线式或4线式。
本文重点介绍常用的4线SPI接口。
图1.含主机和从机的SPI配置4线SPI器件有四个信号:►时钟(SPICLK,SCLK)►片选(CS)►主机输出、从机输入(MOSI)►主机输入、从机输出(MISO)产生时钟信号的器件称为主机。
主机和从机之间传输的数据与主机产生的时钟同步。
同I2C接口相比,SPI器件支持更高的时钟频率。
用户应查阅产品数据手册以了解SPI接口的时钟频率规格。
SPI接口只能有一个主机,但可以有一个或多个从机。
图1显示了主机和从机之间的SPI连接。
来自主机的片选信号用于选择从机。
这通常是一个低电平有效信号,拉高时从机与SPI总线断开连接。
当使用多个从机时,主机需要为每个从机提供单独的片选信号。
本文中的片选信号始终是低电平有效信号。
MOSI和MISO是数据线。
MOSI将数据从主机发送到从机,MISO 将数据从从机发送到主机。
数据传输要开始SPI通信,主机必须发送时钟信号,并通过使能CS信号选择从机。
片选通常是低电平有效信号。
因此,主机必须在该信号上发送逻辑0以选择从机。
SPI是全双工接口,主机和从机可以分别通过MOSI和MISO线路同时发送数据。
SPI协议详解
SPI协议详解SPI的四种模式是什么,然后你不会,总是会有点尴尬。
读了这篇文章,你会对SPI协议有一定的认识,也会对你的面试有帮助。
协议是为了规范收发双方的,好的协议不仅需要速度的保证,还需要传输稳定,可拓展等等。
#SPI协议简介SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。
是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器等芯片,还有数字信号处理器和数字信号解码器之间。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200。
SPI主从模式硬件连接如下图4种工作模式波形时序如下图:#协议心得SPI接口时钟配置心得:在主设备配置SPI接口时钟的时候一定要弄清楚从设备的时钟要求,因为主设备的时钟极性和相位都是以从设备为基准的。
因此在时钟极性的配置上一定要搞清楚从设备是在时钟的上升沿还是下降沿接收数据,是在时钟的下降沿还是上升沿输出数据。
但要注意的是,主设备的SDO连接从设备的SDI,从设备的SDO连接主设备的SDI。
从设备SDI接收的数据是主设备的SDO发送过来的,主设备SDI接收的数据是从设备SDO发送过来的,所以主设备这边SPI时钟极性的配置(即SDO的配置)跟从设备的SDI接收数据的极性是相反的,跟从设备SDO发送数据的极性是相同的。
下面这段话是Sychip Wlan8100 Module Spec上说的,充分说明了时钟极性是如何配置的:The 81xx module will always input data bits at the rising edge of the clock, and the host will always output data bits on the falling edge of the clock.意思是:主设备在时钟的下降沿发送数据,从设备在时钟的上升沿接收数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S P I时钟模式的配置集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]【S P I基础知识简介】设备与设备之间通过某种硬件接口通讯,目前存在很多种接口,SPI接口是其中的一种。
SPI中分Master主设备和Slave从设备,数据发送都是由Master控制。
一个master可以接一个或多个slave。
常见用法是一个Master接一个slave,只需要4根线:SCLK:SerialClock,(串行)时钟MISO:MasterInSlaveOut,主设备输入,从设备输出MOSI:MasterOutSlaveIn,主设备输出,从设备输入SS:SlaveSelect,选中从设备,片选SPI由于接口相对简单(只需要4根线),用途算是比较广泛,主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
即一个SPI的Master通过SPI与一个从设备,即上述的那些Flash,ADC等,进行通讯。
而主从设备之间通过SPI进行通讯,首先要保证两者之间时钟SCLK要一致,互相要商量好了,要匹配,否则,就没法正常通讯了,即保证时序上的一致才可正常讯。
而这里的SPI中的时钟和相位,指的就是SCLk时钟的特性,即保证主从设备两者的时钟的特性一致了,以保证两者可以正常实现SPI通讯。
【SPI相关的缩写或说法】先简单说一下,关于SPI中一些常见的说法:SPI的极性Polarity和相位Phase,最常见的写法是CPOL和CPHA,不过也有一些其他写法,简单总结如下:(1)CKPOL(ClockPolarity)=CPOL=POL=Polarity=(时钟)极性(2)CKPHA(ClockPhase)=CPHA=PHA=Phase=(时钟)相位(3)SCK=SCLK=SPI的时钟(4)Edge=边沿,即时钟电平变化的时刻,即上升沿(risingedge)或者下降沿(fallingedge)对于一个时钟周期内,有两个edge,分别称为:Leadingedge=前一个边沿=第一个边沿,对于开始电压是1,那么就是1变成0的时候,对于开始电压是0,那么就是0变成1的时候;Trailingedge=后一个边沿=第二个边沿,对于开始电压是1,那么就是0变成1的时候(即在第一次1变成0之后,才可能有后面的0变成1),对于开始电压是0,那么就是1变成0的时候;本文采用如下用法:极性=CPOL相位=CPHASCLK=时钟第一个边沿和第二个边沿【SPI的相位和极性】CPOL和CPHA,分别都可以是0或时1,对应的四种组合就是:Mode0CPOL=0,CPHA=0Mode1CPOL=0,CPHA=1Mode2CPOL=1,CPHA=0Mode3CPOL=1,CPHA=1【CPOL极性】先说什么是SCLK时钟的空闲时刻,其就是当SCLK在数发送8个bit比特数据之前和之后的状态,于此对应的,SCLK在发送数据的时候,就是正常的工作的时候,有效active的时刻了。
先说英文,其精简解释为:ClockPolarity=IDLEstateofSCK。
再用中文详解:SPI的CPOL,表示当SCLK空闲idle的时候,其电平的值是低电平0还是高电平1:CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high;CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low;【CPHA相位】首先说明一点,capturestrobe=latch=read=sample,都是表示数据采样,数据有效的时刻。
相位,对应着数据采样是在第几个边沿(edge),是第一个边沿还是第二个边沿,0对应着第一个边沿,1对应着第二个边沿。
对于:CPHA=0,表示第一个边沿:对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;CPHA=1,表示第二个边沿:对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;对于CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿;此处,再多解释一下可能会遇到的CKP和CKE,其是Microchip的PIC系列芯片中的说法。
(1)CKP是ClockPolaritySelect,就是极性=CPOL:CKP,虽然名字和CPOL不一样,但是都是指时钟相位的选择,定义也一样:CKP:ClockPolaritySelectbit1=Idlestateforclock(CK)isahighlevel0=Idlestateforclock(CK)isalowlevel所以不多解释。
(2)CKE是ClockEdgeSelect,就是相位=CPHA:CKE:SPIClockEdgeSelectbit1=TransmitoccursontransitionfromactivetoIdleclockstate0=TransmitoccursontransitionfromIdletoactiveclockstate意思是1=(数据)传输发生在时钟从有效状态转到空闲状态的那一时刻0=(数据)传输发生在时钟从空闲状态转到有效状态的那一时刻其中,数据传输的时刻,即图中标出的“数据transmit传输的时刻”,很明显,该时刻是一个时钟和下一个时钟之间交界的地方,对应的不论是上升沿还是下降沿,都与我们前面提到的CPHA=数据采样的时刻,的边沿方向所相反。
所以,此处的CKE,正好与CPHA相反。
所以,CKP和CKE所对应的取值的含义为:WhenCKP=0:CKE=1=>DatatransmittedonrisingedgeofSCKCKE=0=>DatatransmittedonfallingedgeofSCKWhenCKP=1:CKE=1=>DatatransmittedonfallingedgeofSCKCKE=0=>DatatransmittedonrisingedgeofSCK【如何看懂和记忆CPOL和CPHA】所以,关于在其他地方介绍的,看似多么复杂难懂难记忆的CPOL和CPHA,其实经过上面解释,就肯容易看懂了:去看时序图,如果起始的始终SCLK的电平是0,那么CPOL=0,如果是1,那么CPOL=1,然后看数据采样时刻,即时序图数据线上的数据那个矩形区域的中间所对应的位置,对应到上面SCLK时钟的位置,对应着是第一个边沿或是第二个边沿,即CPHA是0或1。
(对应的是上升沿还是还是下降沿,要根据对应的CPOL的值,才能确定)。
即:(1)如何判断CPOL:SCLK的空闲时候的电压,是0还是1,决定了CPOL是0还是1;(2)如何判断CPHA:而数据采样时刻对应着的SCLK的电平,是第一个边沿还是第二个边沿,对应着CPHA为0还是1。
SCLK的极性,相位,边沿之间的内在逻辑关系SCLK空闲时刻电压低电平CPOL=0高电平CPOL=1数据采样时刻,SCLK的edge是第一个还是第二个第一个边沿CPHA=0上升沿(开始的电平是低电压0,而第一个边沿,只能是从0变到1,即上升沿)下降沿第二个边沿CPHA=1下降沿上升沿(开始电平是高电平1,第二个边沿,肯定是从低电平0变到高电平1,因为第一个边沿肯定是从高电平1,变到低电平0)【软件中如何设置SPI的极性和相位】SPI分主设备和从设备,两者通过SPI协议通讯。
而设置SPI的模式,是从设备的模式,决定了主设备的模式。
所以要先去搞懂从设备的SPI是何种模式,然后再将主设备的SPI的模式,设置和从设备相同的模式,即可正常通讯。
对于从设备的SPI是什么模式,有两种:(1)固定的,有SPI从设备硬件决定的SPI从设备,具体是什么模式,相关的datasheet中会有描述,需要自己去datasheet中找到相关的描述,即:关于SPI从设备,在空闲的时候,是高电平还是低电平,即决定了CPOL是0还是1;然后再找到关于设备是在上升沿还是下降沿去采样数据,这样就是,在定了CPOL的值的前提下,对应着可以推算出CPHA是0还是1了。
举例1:CC2500-Low-CostLow-Power2.4GHzRFTransceiver的datasheet中SPI的时序图从图中可以看到,最开始的SCLK和结束时候的SCLK,即空闲时刻的SCLK,是低电平,推导出CPOL=0,然后可以看到数据采样的时候,即数据最中间的那一点,对应的是SCLK的第一个边沿,所以CPHA=0(此时对应的是上升沿)。
举例2:SSD1289-240RGBx320TFTLCDControllerDriver的datasheet中提到:“SDIisshiftedinto8-bitshiftregisteroneveryrisingedgeofSCKintheorderofdatabi t7,databit6……databit0.”意思是,数据是在上升沿采样,所以可以断定是CPOL=0,CPHA=0,或者CPOL=1,CPHA=1的模式,但是至于是哪种模式。
按理来说,接下来应该再去确定SCLK空闲时候是高电平还是低电平,用以确定CPOL是0还是1,但是datasheet中没有提到这点。
所以,此处,目前不太确定,是两种模式都支持,还是需要额外找证据却确定CPOL是0还是1.(2)可配置的,由软件自己设定从设备也是一个SPI控制器,4种模式都支持,此时只要自己设置为某种模式即可。
然后知道了从设备的模式后,再去将SPI主设备的模式,设置为和从设备模式一样,即可。
对于如何配置SPI的CPOL和CPHA的话,不多细说,多数都是直接去写对应的SPI控制器中对应寄存器中的CPOL和CPHA那两位,写0或写1即可。
举例:此处遇到的C8051F347中的SPI就是一个SPI的controller控制器,即支持软件配置CPOL和CPHA的值,四种模式都支持,此处C8051F347作为SPI从设备,设置了CPOL=1,CPHA=0的模式,因此,此处对应主芯片BlackfinF537中的SPI控制器,作为Master主设备,其SPI的模式也要设置为CPOL=1,CPHA=0。
【待解决问题】对于软件去如何设置主设备(和从设备)的CPOL和CPHA的值,是搞懂了,知道两者要匹配才可以正常通讯,但是对于CPOL和CPHA这四种模式,不同的模式之间,相对来说有何优缺点,比如是否哪种模式更稳定,数据更不容易出错等等,还是不清楚【总结】1.IT方面的资料,国内的,还是把问题讲明白的太少,想搞懂问题,还是得去找英文的。