多旋翼无人机类型
多旋翼无人机的组成
多旋翼无人机的组成
多旋翼无人机是一种通过多个旋翼提供升力和稳定性的飞行器。
它由多个旋翼、机身、电池、控制器和传感器等部件组成。
下面将介绍多旋翼无人机的组成结构及各部件的功能。
1. 旋翼:多旋翼无人机通常由四个以上的旋翼组成,常见的有四旋翼、六旋翼、八旋翼等。
旋翼通过快速旋转产生升力,控制旋翼的转速可以实现飞行高度和方向的调节。
2. 机身:机身是连接各个部件的主体,通常由轻质材料如碳纤维或铝合金制成,具有足够的强度和稳定性以支撑整个无人机的飞行。
3. 电池:电池是提供动力的重要部件,多旋翼无人机通常使用锂电池作为能源,电池的容量和电压会直接影响无人机的续航时间和飞行性能。
4. 控制器:控制器是多旋翼无人机的大脑,负责接收和处理传感器反馈的数据,控制旋翼的转速和姿态,以确保无人机的稳定飞行和精准操控。
5. 传感器:传感器包括陀螺仪、加速度计、罗盘等,通过感知飞行器的姿态、速度和方向等信息,传输给控制器进行实时调节,以保持飞行器的平衡和稳定。
6. 遥控器:遥控器是操作无人机的设备,通过遥控器上的摇杆、按
钮等控制无人机的起飞、降落、飞行方向和高度等动作。
多旋翼无人机的组成包括旋翼、机身、电池、控制器、传感器和遥控器等部件,每个部件都发挥着重要的作用,协同工作才能实现无人机的稳定飞行和精准操控。
随着技术的不断发展,多旋翼无人机在农业、航拍、物流等领域有着广泛的应用前景,相信未来会有更多创新的无人机设计和应用出现。
多旋翼民用无人驾驶航空器电池容量的单位

多旋翼民用无人驾驶航空器电池容量的单位1. 引言1.1 概述无人驾驶航空器(Unmanned Aerial Vehicles, UAV)是近年来科技领域快速发展的产物,其在民用领域的应用正在呈现出日益增长的趋势。
多旋翼无人驾驶航空器作为一种常见类型的无人机,具有垂直起降,灵活性高等特点,被广泛运用于航拍、快递投递、搜救等众多领域。
然而,多旋翼无人驾驶航空器的电池容量对其飞行性能具有重大影响。
电池容量决定了无人机能够维持飞行的时间以及飞行半径的大小。
因此,在选择合适的电池容量时需要考虑到负载需求、任务要求以及成本和重量平衡等多个因素。
本文旨在通过对多旋翼民用无人驾驶航空器电池容量单位进行深入探讨,分析电池容量与飞行性能之间的关系,并提供一些选择合适电池容量方法的思路。
希望通过本文可以为各界对于多旋翼无人驾驶航空器的电池容量选择提供一定的参考和指导。
1.2 研究背景随着科技进步和无人机产业的快速发展,多旋翼无人驾驶航空器在民用领域中的应用逐渐增加。
然而,在实际应用中,多旋翼无人驾驶航空器的续航能力仍然是一个值得关注的问题,其中电池容量作为重要因素之一备受关注。
当前存在着许多不同单位来表示电池容量,如安时(Ah)、毫安时(mAh)、千瓦时(kWh)等等。
相对于其他领域而言,目前在多旋翼民用无人驾驶航空器领域针对电池容量单位选择与使用并没有统一标准和共识。
因此,本文将在对多旋翼无人驾驶航空器电池容量单位进行探讨的基础上,分析其与飞行性能之间的关系,并结合负载需求、任务要求以及成本和重量平衡等因素来探讨选择合适电池容量方法。
1.3 目的本文的主要目的是探讨多旋翼民用无人驾驶航空器的电池容量单位选择问题,并分析电池容量对于飞行性能的影响。
通过研究相关文献和实例,总结出一些选择合适电池容量的方法和原则。
同时,本文还将展望未来多旋翼民用无人驾驶航空器发展的趋势,并提出相应的建议。
通过本文的撰写,希望能够为各界对于多旋翼无人驾驶航空器电池容量选择和应用提供一定的参考和指导。
多旋翼无人机基础知识二
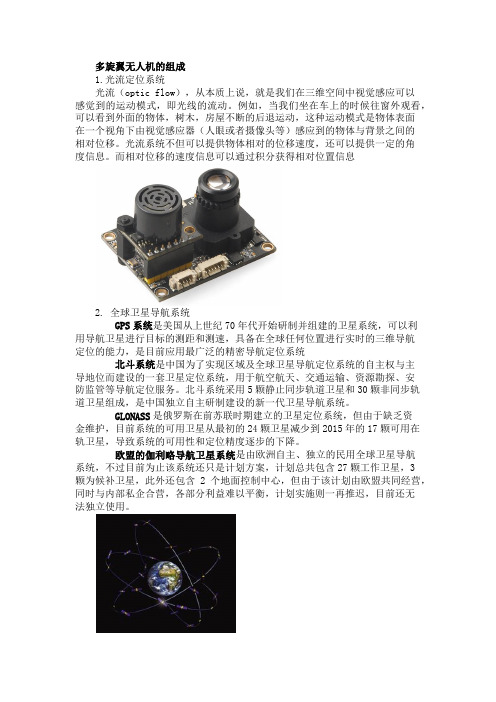
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。
无人机多旋翼考三级应用领域
无人机多旋翼考三级应用领域【实用版】目录一、无人机概述二、多旋翼无人机的特点三、无人机三级应用领域介绍四、多旋翼无人机在三级应用领域的优势五、多旋翼无人机的发展前景正文一、无人机概述无人机,即无人驾驶飞行器,是一种通过自主设定的计算机程序和传感器进行飞行的航空器。
近年来,随着科技的飞速发展,无人机在军事、民用和商业领域的应用越来越广泛,成为我国科技领域的一大亮点。
二、多旋翼无人机的特点多旋翼无人机是由多个旋翼组成的无人机,具有结构简单、飞行稳定、操控方便等特点。
多旋翼无人机在飞行过程中,各个旋翼可独立控制,实现垂直起降、悬停、前进、后退、向左、向右等多种飞行姿态,具有较强的机动性和适应性。
三、无人机三级应用领域介绍无人机分为一级、二级和三级,其中三级无人机是最高级别的无人机,具有最大的飞行高度和最远的飞行距离。
三级无人机的应用领域主要包括以下几个方面:1.航拍:三级无人机可在高空进行拍摄,为影视制作、广告拍摄、城市规划等领域提供高质量的影像资料。
2.物流配送:三级无人机可实现远距离、高速度的货物配送,解决地面交通拥堵等问题,提高物流效率。
3.农业应用:三级无人机可在农田上方进行大面积的喷洒、施肥等作业,提高农业生产效率,降低农药使用量。
4.公共安全:三级无人机可应用于森林火警侦查、地质灾害监测等领域,提高公共安全水平。
四、多旋翼无人机在三级应用领域的优势多旋翼无人机在三级应用领域具有以下优势:1.成本低:多旋翼无人机的制造成本相对较低,可以降低无人机在三级应用领域的普及门槛。
2.维护简便:多旋翼无人机的结构简单,易于维护和维修,降低了运营成本。
3.续航能力强:多旋翼无人机的续航能力较强,可在空中长时间执行任务,满足三级应用领域的需求。
4.载荷能力:多旋翼无人机具有较大的载荷能力,可搭载各种传感器、相机等设备,满足不同领域的应用需求。
五、多旋翼无人机的发展前景随着科技的不断进步,多旋翼无人机在三级应用领域的发展前景十分广阔。
多旋翼无人机基础知识

无人机,也称无人飞行器,英文Unmannedaerial vehicle(UAV)无人飞行器是一种配置了数据处理系统、传感器、自动控制系统和通讯系统等必要机载设备的飞行器。
无人机技术是一项设计多个技术领域的综合系统,它对通讯技术、传感器技术、人工智能技术、图像处理技术模式识别技术、现代控制理论都有较深的运用和较高的要求。
无人飞行器与它所配套的地面站测控系统、存储、托运、发射、回收、信息处理等维护保障部分一起形成了一套完整的系统,同城无人飞行器系统Unmannedaerial system(UAS)1.1无人机的种类固定翼无人飞行器采用电动或者燃料发动机产生向前拉力或推力,飞行器依靠固定翼的翼形上下边产生的大气动压强差产生的升力维持飞行器的控制。
无人飞艇采用充气囊结构作为飞行器的升力来源,充气囊一般充有比空气目的小的氢气或氦气。
旋翼无人飞行器,其配备有多个朝正上方安装的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力。
扑翼无人飞行器是基于仿生学原理,配合活动机翼能否模拟飞鸟的翅膀上下扑动的动作而产生升力和向前的推力。
伞翼无人飞行器采用伞型机翼作为飞行器升力的主要来源。
1.2无人机的分类与管理在中国无人机驾驶航空器体系中,按照无人机的基本起飞重量指标可以分为四个等级1. 微型无人机,空机质量小于等于7千克2. 轻型无人机,空机质量大于7千克,但小于等于116千克,并且全马力飞行中,矫正空速度100公里/小时,升限小鱼3000米3. 小型无人机,空机质量小于等于5700千克,除微型及小型无人机以外的其他无人机4. 大型无人机,空机质量大于5700千克的无人机中国的空域目前归属于军队管理,民用航空领域则由民航总局向军队申请划分空域及航道。
民航总局针对私人飞行器的管理专设“中国航空器拥有者及驾驶员协会AircraftOwners and Pilots Association Of China - AOPA”,中国民航领域对飞行器主要管理分为三个层次等级进行管理。
无人机 南方多旋翼详细参数
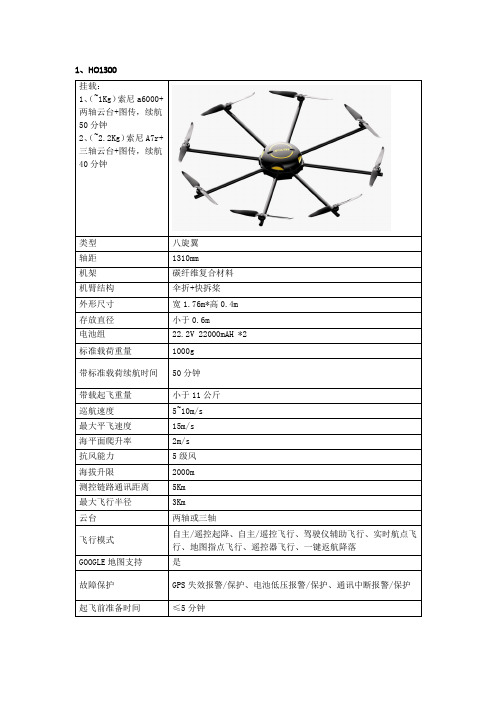
挂载:1、(~1Kg)索尼a6000+两轴云台+图传,续航50分钟2、(~2.2Kg)索尼A7r+三轴云台+图传,续航40分钟类型八旋翼轴距1310mm机架碳纤维复合材料机臂结构伞折+快拆桨外形尺寸宽1.76m*高0.4m 存放直径小于0.6m电池组22.2V 22000mAH *2 标准载荷重量1000g带标准载荷续航时间50分钟带载起飞重量小于11公斤巡航速度5~10m/s最大平飞速度15m/s海平面爬升率2m/s抗风能力5级风海拔升限2000m测控链路通讯距离5Km最大飞行半径3Km云台两轴或三轴飞行模式自主/遥控起降、自主/遥控飞行、驾驶仪辅助飞行、实时航点飞行、地图指点飞行、遥控器飞行、一键返航降落GOOGLE地图支持是故障保护GPS失效报警/保护、电池低压报警/保护、通讯中断报警/保护起飞前准备时间≤5分钟挂载:索尼a6000 + 轻型两轴云台 + 图传,续航不少于40分钟类型四旋翼轴距1000mm机架碳纤维复合材料一体成型机臂结构插臂式快拆外形尺寸宽1.8m*高0.5m存放直径小于0.7m电池组22.2V 10000mAH *2标准载荷重量600g带标准载荷续航时间45分钟带载起飞重量小于6.5公斤巡航速度5m/s最大平飞速度8m/s海平面爬升率5m/s最大抗风能力6m/s(4级风)海拔升限4500m测控链路通讯距离3Km最大飞行半径5Km安静性≤75dBA@3m抗雨24小时降雨量小于100毫米时可持续安全飞行抗强电场干扰能力距离220kV超高压输电线5米距离时,飞行器控制、通讯线路不受影响云台0~90度俯仰遥控可调,俯仰/滚转两轴陀螺稳定飞行模式自主/遥控起降、自主/遥控飞行、驾驶仪辅助飞行、实时航点飞行、地图指点飞行、遥控器飞行、一键返航降落GOOGLE地图支持是故障保护GPS失效报警/保护、电池低压报警/保护、通讯中断报警/保护起飞前准备时间≤5分钟3、HD1600挂载:1、(~2.5Kg)倾斜相机,续航不小于40分钟2、(~4.5Kg)红外相机+ 可见光相机 + 图传+ 云台,续航不小于35分钟类型六旋翼轴距1600mm机架碳纤维复合材料一体成型机臂结构扭转插臂式快拆外形尺寸宽2.3m*高0.55m存放直径小于0.8m电池组22.2V 16000mAH *2标准载荷重量3000g带标准载荷续航时间45分钟带载起飞重量小于18公斤巡航速度5m/s最大平飞速度8m/s海平面爬升率5m/s最大抗风能力6m/s(4级风)海拔升限4500m测控链路通讯距离5Km最大飞行半径3Km安静性≤75dBA@3m抗雨24小时降雨量小于100毫米时可持续安全飞行抗强电场干扰能力距离220kV超高压输电线5米距离时,飞行器控制、通讯线路不受影响云台0~90度俯仰遥控可调,俯仰/滚转两轴陀螺稳定飞行模式自主/遥控起降、自主/遥控飞行、驾驶仪辅助飞行、实时航点飞行、地图指点飞行、遥控器飞行、一键返航降落GOOGLE地图支持是故障保护GPS失效报警/保护、电池低压报警/保护、通讯中断报警/保护起飞前准备时间≤5分钟4、HD1350南方六轴翼植保机挂载:16Kg药水类型六旋翼机架碳纤维可折叠机架外形尺寸折叠后2396*600*300(mm)爬升速率最大3米/秒作业速度6米/秒作业高度1-3m喷幅宽度≥5m雾化标准60-120μm机身自重10Kg任务载荷16Kg(药箱容量8L*2)抗风能力4级风作业效率2-3亩/min飞行高度1000米以下工作海拔不限制电池22.2V 18000mah *2产品优势1、专利快速折叠,推车设计2、防荡药箱设计,有效减轻药液晃动对无人机产生的影响3、高压雾化喷头,节水90%,节药35%4、高效率,8分钟可喷20亩地(视环境而定)5、双药箱设计,可携带16KG农药6、简单化操作,专人指导7、高效便捷的售后服务。
无人机运行手册多旋翼与固定翼飞行器比较与选择
无人机运行手册多旋翼与固定翼飞行器比较与选择无人机运行手册:多旋翼与固定翼飞行器比较与选择无人机(Unmanned Aerial Vehicle,简称无人机)作为一种无人操控飞行器,正逐渐成为各行各业的利器。
在选择无人机时,最重要的选择之一就是决定是使用多旋翼还是固定翼飞行器。
本文将对多旋翼与固定翼飞行器进行比较与选择的探讨。
多旋翼飞行器,如四轴、六轴、八轴等,以较小的体积和简单的结构著称。
它们可以在狭小的空间内悬停、起降,并能够实现复杂的飞行动作。
多旋翼飞行器通常适用于需要低空慢速悬停、巡航、监测等场景。
然而,由于设计结构的限制,多旋翼飞行器航程和续航时间相对较短,通常需要定期更换电池以维持飞行。
相较而言,固定翼飞行器以其高速高效、长续航时间等特点而备受青睐。
固定翼飞行器需要利用气动力维持飞行,并通常具有更远的通信和传输距离。
这意味着固定翼飞行器适用于需要大范围巡航、地理测绘、搜救等任务。
然而,固定翼飞行器的起降场地需求相对较大,使用成本和飞行技术要求也较高。
在选择多旋翼还是固定翼飞行器时,需根据实际需求进行综合考量。
如果任务需要在狭小空间内进行低空慢速飞行,如建筑监测、农业植保等,多旋翼飞行器是更好的选择;而如果任务需求是大范围快速飞行,如边境巡逻、林地勘测等,固定翼飞行器则更为适合。
此外,也可以考虑选用可转换机型,即集多旋翼和固定翼功能于一体的飞行器。
这种飞行器能够在需要时切换两种飞行模式,兼具多旋翼的垂直起降和固定翼的长续航能力,适用范围更为广泛。
总的来说,多旋翼和固定翼飞行器各有优势,并根据实际需求来选择更加合适的飞行器类型。
在无人机运行手册中,对于飞行器的选择应根据任务要求、环境特点、技术水平等方面进行综合考量,以确保飞行任务的顺利完成。
典型多旋翼无人机用电机的种类

典型多旋翼无人机用电机的种类
典型多旋翼无人机常用的电机种类包括直流无刷电机(BLDC)和直流有刷电机(DC brushed motor)。
两种电机的工作原理
和结构有所不同,适用于不同的应用场景。
直流无刷电机是目前多旋翼无人机中最常用的电机类型。
它们使用一组磁钢和一组线圈产生电磁力以驱动转子,通过电子调速器(ESC)控制供电以改变电机转速。
直流无刷电机具有高
效率、高转矩和低噪音等优点,因此广泛应用于多旋翼无人机的提升和稳定。
直流有刷电机是一种较为简单的电机类型,它们通过内部的刷子和电刷与转子上的线圈接触,产生电磁力驱动转子运转。
直流有刷电机具有转速较高、价格相对较低的特点,适用于一些低成本和较简单的应用场景。
除了这两种常用的电机类型之外,还有一些其他类型的电机也被用于特定的无人机应用。
例如无线电电调控混合电机
(Direct Drive Hybrid Motor),它融合了直流无刷电机和直流
马达的优点,具有高效率和高转矩的特点,常用于一些高端无人机中。