数字信号处理与DSP实现技术课后复习题与参考答案
《数字信号处理与DSP器件》作业及参考答案

《数字信号处理与DSP器件》作业及参考答案《数字信号处理与DSP器件》作业及参考答案丁喜冬中⼭⼤学物理科学与⼯程技术学院第1章概述思考题1, P12: 1,2,3, 7,9,11。
2, 查看TI公司⽹站,找出3~4种该公司⽬前主推的DSP芯⽚的型号和价格,下载datasheet。
参考答案:1、DSP算法的实现⽅法主要有哪些?答:(1)在通⽤的计算机(如PC)上涌软件(如C语⾔)实现。
(2)在通⽤计算机系统中加上专⽤的加速处理机实现。
(3)⽤通⽤的单⽚机(如MCS-51、MSP430系列等)实现。
(4)⽤通⽤的可编程DSP芯⽚实现。
(5)⽤专⽤的DSP芯⽚实现。
2、简述DSP应⽤系统的典型构成和特点。
答:DSP应⽤系统的典型构成如下所⽰:3、简述DSP应⽤系统的⼀般设计过程。
答:定义系统性能指标→采⽤⾼级语⾔进⾏性能模拟→设计实时DSP应⽤系统→借助开发⼯具进⾏软硬件调试→系统集成与独⽴系统运⾏。
7、什么是定点DSP芯⽚和浮点DSP芯⽚?各有什么优缺点?答:定点DSP芯⽚:数据以定点格式⼯作的DSP芯⽚。
动态范围⼤,精度⾼,字长为32位(可扩⾄40),程序开发周期短;但功耗⾼,速度慢,价格⾼。
浮点DSP芯⽚:数据以浮点格式⼯作的DSP芯⽚。
功耗低,速度快,价格低;但动态范围⼩,精度低,字长为16位,程序开发周期长。
9、TMS32VC5416-160⼯作在160MHz时的指令周期是多少ns?它的运算速度是多少MIPS?答:当⼯作在100MHz时,其指令周期和运算速度⼜是多少?在160MHz时的指令周期是6.25ns,运算速度是160MIPS;在100MHz时的指令周期是10ns,运算速度是100MIPS。
11、写出以下缩写词的中英⽂全称:DSP、TI、MAC、MIPS、MOPS、MFLOPS、BOPS、DIP、PGA、PLCC、PQFP、PWM答:PGA、PLCC、PQFP、PWM。
DSP:Digital Signal Processing 数字信号处理TI:Texas Instruments 德州仪器MAC:Multiplier and Accumulator 乘累加单元MIPS:Million Instructions Per Second每秒执⾏百万条指令MOPS:Million Operations Per Second每秒执⾏百万次操作MFLOPS:Million Floating-point Operations Per Second每秒执⾏百万次浮点操作BOPS:Billion Operations Per Second每秒执⾏⼗亿次操作DIP:Dual In-line Package 双列直插式封装PGA:Pin Grid Array 直插式封装PLCC:Plastic Leaded Chip Carrier带引线的塑料芯⽚载体PQFP:Plastic Quad Flat Pack 塑料扁平⽅形封装PWM:Pulse Width Modulation 脉冲宽度调制⼆, TI公司⽬前主推的DSP芯⽚的型号和价格:答:TI公司现在主要推出三个系列的dsp芯⽚,其分为从各系列芯⽚的数量来看,C6000⾼性能dsp仍然是当下主流dsp。
dsp试题及答案

dsp试题及答案一、选择题1. 数字信号处理(DSP)中,离散傅里叶变换(DFT)的基本周期是:A. 1B. 2πC. ND. 2N答案:C2. 在DSP中,快速傅里叶变换(FFT)的主要优点是:A. 提高了计算精度B. 减少了计算量C. 增加了数据的实时性D. 增强了信号的稳定性答案:B3. 下列哪个不是数字滤波器的设计方法?A. 窗函数法B. 脉冲响应不变法C. 频率采样法D. 相位锁定环法答案:D二、填空题4. 数字信号处理中,_______是一种将模拟信号转换为数字信号的过程。
答案:采样5. 离散时间信号的傅里叶变换(DTFT)的频率范围是_______。
答案:[0, π]6. 一个数字滤波器的频率响应函数H(z)可以用来描述滤波器对不同频率信号的_______。
答案:响应三、简答题7. 简述数字信号处理中的频域分析方法的主要特点。
答案:频域分析方法通过将时域信号转换到频域,利用频域的特性来分析和处理信号。
主要特点包括:能够直观地观察信号的频率成分;便于进行信号的滤波和调制;可以简化某些数学运算。
8. 解释什么是数字信号处理中的过采样,并说明其在实际应用中的优势。
答案:过采样是指采样频率远高于信号最高频率的两倍。
在实际应用中,过采样可以提高信号的分辨率,降低噪声的影响,并且有助于信号的重建和处理。
四、计算题9. 给定一个离散时间信号x[n] = {1, 2, 3, 4},计算其离散傅里叶变换(DFT)的前四个值。
答案:根据DFT的定义,x[n]的DFT X[k]为:X[0] = 1 + 2 + 3 + 4X[1] = 1 - 2 + 3 - 4X[2] = 1 + 2 - 3 - 4X[3] = 1 - 2 - 3 + 410. 已知一个低通滤波器的冲激响应h[n] = {1, 1/2, 1/4},计算其频率响应H(ω)。
答案:根据傅里叶变换的定义,H(ω)可以通过h[n]的傅里叶变换得到。
《数字信号处理与DSP实现技术》课后习题与参考答案
21世纪高等院校电子信息类规划教材安徽省高等学校“十二五”省级规划教材数字信号处理与DSP实现技术课后习题与参考答案主编:陈帅副主编:沈晓波淮南师范学院2015.11第1章绪论思考题1.什么是数字信号?2.什么是数字信号处理?3.数字信号处理系统的实现方法有哪些?4.数字信号处理有哪些应用?5.数字信号处理包含哪些内容?6.数字信号处理的特点是什么?第1章绪论参考答案1.时间和幅度都离散的信号称为数字信号,即信号的时间取离散的值,幅度也取离散的值。
2.数字信号处理是指在数字领域进行数字信号的加工(变换、运算等),即输入是数字信号,采用数字信号处理方法进行处理,输出仍然是数字信号。
3.数字信号处理系统的实现方法有①通用软件方法实现系统;②专用加速处理机方法;③软硬件结合的嵌入式处理方法;④硬件方法。
4.数字信号处理在通信、计算机网络、雷达、自动控制、地球物理、声学、天文、生物医学、消费电子产品等各个领域均有应用,是信息产业的核心技术之一。
比如信源编码、信道编码、多路复用、数据压缩,数字语音、汽车多媒体、MP3/MP4/MP5、数字扫面仪、数字电视机顶盒、医院监视系统、生物指纹系统等。
5.数字信号处理主要包含以下几个方面的内容①离散线性时不变系统理论。
包括时域、频域、各种变换域。
②频谱分析。
FFT谱分析方法及统计分析方法,也包括有限字长效应谱分析。
③数字滤波器设计及滤波过程的实现(包括有限字长效应)。
④时频-信号分析(短时傅氏变换),小波变换,时-频能量分布。
⑤多维信号处理(压缩与编码及其在多煤体中的应用)。
⑥非线性信号处理。
⑦随机信号处理。
⑧模式识别人工神经网络。
⑨信号处理单片机(DSP)及各种专用芯片(ASIC),信号处理系统实现。
6.数字信号处理主要具有4个方面优点:①数字信号精度高;②数字信号处理灵活性强;③数字信号处理可实现模拟信号难以实现的特性;④数字信号处理可以实现多维信号处理。
数字信号处理主要存在3个方面缺点:①需要模拟接口等增加了系统复杂性;②由于取样定理的约束其应用的频率受到限制;③功耗大。
dsp课后习题答案

dsp课后习题答案
DSP课后习题答案
数字信号处理(DSP)是一门重要的电子学科,它涉及到数字信号的采集、处
理和分析。
在学习DSP的过程中,课后习题是巩固知识、加深理解的重要方式。
下面我们来看一下一些DSP课后习题的答案。
1. 什么是数字信号处理?
数字信号处理是指对数字信号进行采集、处理和分析的过程。
它涉及到数字信
号的数字化、滤波、编码、解码等操作。
2. 为什么要进行数字信号处理?
数字信号处理可以提高信号的质量、减少噪音、增强信号的特征等,从而更好
地满足实际应用的需求。
3. 举例说明数字信号处理在实际生活中的应用。
数字信号处理在通信、音频处理、图像处理等领域都有广泛的应用。
比如在手
机通信中,数字信号处理可以对语音信号进行压缩、去噪等操作,从而提高通
信质量。
4. 什么是数字滤波?
数字滤波是指对数字信号进行滤波操作,以实现去除噪音、增强信号特征等目的。
常见的数字滤波有低通滤波、高通滤波、带通滤波等。
5. 请简要说明数字信号处理系统的基本结构。
数字信号处理系统包括信号采集、信号处理和信号输出三个基本部分。
其中信
号采集可以通过模数转换器将模拟信号转换为数字信号,信号处理包括滤波、
编码、解码等操作,信号输出则是将数字信号转换为模拟信号输出。
以上是一些DSP课后习题的答案,希望对大家的学习有所帮助。
在学习DSP的过程中,不仅要掌握理论知识,还要多做习题,加深对知识的理解和应用能力。
希望大家都能在DSP领域取得更好的成绩!。
数字信号处理原理与算法实现课后练习题含答案

数字信号处理原理与算法实现课后练习题含答案题目一给定一个分别由两个信号串A和B组成的长度为4的信号的数组arr:arr = np.array([[1,2,1,1],[2,3,1,1]])请问如何使用FFT算法计算每个信号串的频域表达式?答案一使用FFT算法进行频域转换后,每个信号串的频域表达式如下:A_freq = np.fft.fft(arr[0])B_freq = np.fft.fft(arr[1])题目二设有如下的离散时间信号:x = np.sin(2*np.pi*100*np.linspace(0,1,256)) + np.sin(2*np.pi*2000*np.lins pace(0,1,256)) + np.random.randn(256)请问如何对该信号进行时域显示和频域显示?答案二使用Matplotlib库可以对离散时间信号进行时域显示:import matplotlib.pyplot as pltplt.plot(x)plt.show()使用FFT算法并结合Matplotlib库可以对离散时间信号进行频域显示:from scipy.fftpack import fftx_freq = fft(x)plt.plot(np.abs(x_freq))plt.show()题目三对于一个长度为16的实数序列x,要求其DFT的结果为奇对称,即X[k] =-X[N-k]其中 k 和 N 均为整数。
请问该序列有哪些数值?答案三由于X[k] = -X[N-k],因此对于k = 0,有X[0] = 0。
同时由于这是一个实数序列,因此N-k = N-0 = N,表示X[N]为实数。
对X[N/2]进行分析,因为N为偶数,所以N/2为整数。
因此X[N/2] =-X[N/2]说明X[N/2]为零或为纯虚数。
现在考虑对k进行分析。
由于X[k] = -X[N-k],因此在考虑k时,也要同时考虑N-k的情况。
数字信号处理DSP考试题+答案

数字信号处理DSP考试题+答案1.TMS320C54X的CPU有3个状态和控制寄存器。
答:状态寄存器0状态寄存器1处理器⼯作⽅式寄存器2.TMS320C54X的存储空间,C54X⽚内总线。
答:(1)总存储空间为192k,分成3个可选择的存数空间<1>64k的程序存储空间<2>64k的数据存储空间<3>64k的I/O空间(2)C54⽚内有8条16位主总线:4条程序/数据总线,4条相对应的地址总线1>程序总线:传送取⾃程序存储器的指令代码和操作数3条数据总线:(CB,DB,EB)将内部各单元(CPU,数据地址⽣成电路,程序地址⽣成电路,⽚外电路以及数据存储器)连接在⼀起。
CB,DB传送读⾃数据存储器的操作数。
EB传送写到存储器的数据。
4条地址总线:(BAB,CAB,DAB,EAB)传送指令所需地址。
3.TMS320VC5402的流⽔线包括哪⼏个阶段。
答:(1)预取指:加载⼀条新指令的地址(⼀个机器周期)(2)取指:读取这条指令(⼀个或多个机器周期)(3)译码:产⽣执⾏指令所需的⼀系列控制信号(4)寻址:加载⼀个或两个操作数的地址(5)读书:读出操作数,加载操作数地址(6)执⾏:执⾏指令,将数据送到数据存储空间4.带延迟分⽀转移指令与不带延迟分⽀转移指令在程序处理中有哪些不同?答:延迟操作指令⽐他们的⾮延迟型指令都要快,在调试延迟型指令时直观性稍差⼀些,因此在⼤多情况下还是采⽤⾮延迟型指令。
5.定时器由哪些寄存器管理?定时周期为?答:(1)定时器主要由3个寄存器所组成,定时器寄存器(TIM),定时器周期寄存器(PRD),定时器控制寄存器(TCR)(2)周期:CLKOUT*(TDDR+1)*(PRD+1)(时钟周期)(定时器分频系数,时间常数)6.中断处理过程可以分成哪⼏个阶段?如果想修改中断向量表的位置,应如何做?答:第⼀阶段:接受中断请求第⼆阶段:响应中断第三阶段:执⾏中断服务程序中断向量地址由PMST寄存器中的IPTR和左移2位后的中断向量序号所组成。
数字信号处理DSP原理及应用考试试题与答案

数字信号处理DSP原理及应用考试一、选择题1.’C54x 进行32位长数据读操作时使用的数据总线是( )。
[单选题] *A) CB和EBB) EB和DBC) CB和DB*D) CB、DB和EB2.以下哪种方法不能清除中断标志寄存器IFR中的中断标志位。
( ) [单选题] *A) 硬件复位B) 软件复位C) 软件置位IFR寄存器中的标志位D) 软件清零IFR寄存器中的标志位*3.下列说法中错误的是( )。
[单选题] *A) 每个DARAM块在单周期内能被访问2次。
B) 每个SARAM块在单周期内只能被访问1次。
C) 片内ROM主要存放固化程序和系数表,只能作为程序存储空间。
*D) DARAM和SARAM既可以被映射到数据存储空间用来存储数据,也可以映射到程序空间用来存储程序代码。
4. 若程序中对堆栈设置如下,则下列说法错误的是( )。
size .set 120stack .usect “STACK”,sizeSTM # stack + size,SP [单选题] *A) 此堆栈段的段名为STACKB) 此堆栈段共120个单元C) 此堆栈段第一个变量的名为size称*D) 堆栈设置好后,堆栈指针SP指向栈底5.若要累加器A大于0或溢出时,程序转移至sub,可以实现此功能的指令是( )。
[单选题] * A) BC sub, AGT B) BC sub, AGT, AOV*BC sub, AOVC) BC sub, AGT D) BC sub, AGT, ANOVBC sub, ANOV6.执行指令PSHM AR5之前SP=03FEH,则指令执行后SP=( ) [单选题] *A) 03FDH*B) 03FFHC) 03FCHD) 0400H7.以下控制位中哪一位用来决定程序存储空间是否使用内部RAM。
( ) [单选题] *A) MP/B) OVLY*C) DROMD) SXM8. 下列指令中,哪条指令的写法是错误的。
数字信号处理参考答案
数字信号处理参考答案《解答题及分析题》一、解释下列名词:(1)DSP: 数字信号处理或者数字信号处理芯片;(2)MIPS: 每秒执行百万条指令 ;(3)MOPS: 每秒执行百万条操作 ;(4)FFT: 快速傅里叶变换 ;(5)MAC 时间: 完成一次乘法和一次加法的时间 ;(6)指令周期:执行一条指令所需要的时间,单位通常为(ns );(7)BOPS:每秒执行十亿次操作;(8)MFLOPS :每秒执行百万次浮点操作;(9)TMS320C54X :TI 公司的54系列定点DSP 芯片;(10)ADSP21XX:AD :公司的21系列定点DSP 芯片;二、已知)()()]([n x n g n x T =判断系统是否为:① 因果系统;② 稳定系统;③ 线性系统;④ 移不变系统解:(1)求解系统的单位取样响应)(n h令)()(n n x δ=,则系统的单位取样响应)()()(n n g n h δ=① 当0<n 时,0)(=n h ,系统为因果系统;②0)(=∑+∞-∞=n n h ,是稳定系统; ③ 设)()()(),()()(2211n g n x n y n g n x n y ==由于)()()()([)(2121n by n ay n bx n ax T n y +=+=,④ 由于)()]([),()()(k n y k n X T k n g k n x k n y -≠---=-而, 因此,系统为移变系统。
其余几个题的判断方法与这个相同,略。
三、画方框图说明DSP 系统的设计步骤。
设计步骤:(1)根据实际问题的要求写出任务书确定设计目标;(2)算法研究并确定系统的性能指标;(3)选择DSP 芯片和外围芯片;(4)完成系统的硬件设计和软件设计;(5)完成系统的硬件仿真和软件调试;(6)系统集成和测试。
四、以TMS320C5402为例,说明一个典型的DSP 实时数字信号处理系统通常有哪些部分组成?画出系统组成的方框图。
数字信号处理dsp资料dsp试题及答案1.docx

一、填空(每空1分,共30分)1.TI公司的定点DSP产品主要有TMS320C2000系列、TMS320C5000系列和TMS320C6000 系列。
2.T54X DSP中传送执行指令所需的地址需耍用到PAB 、CAB、DAB和EAB 4条地址总线。
3.DSP的内部存储器类型可分为随机存取存储器(RAM)和只读存储器(ROM)o其中RAM又可以分为两种类型:单寻址RAM (SARAM)和双寻址RAM (DARAM)。
4.9C54x DSP的内部总存储空间为192K字,分成3个可选择的存储空间:64K 字的程序存储空间、64K字的数据存储空间和64K字的I/O空间o5.从功能结构上,9C54X DSP的CPU可以划分成运算部件和控制部件两大部分。
6.9C54xDSP的寻址方式有七种,分别为立即寻址、绝对寻址、累加器寻址、直接寻址、间接寻址、存储器映象寄存器寻址、堆栈寻址。
7.在9C54x DSP寻址和指令系统中,Xmem和Ymem表示16位双寻址操作数,Dmad为16位立即数,表示数据存储器地址,Pmad为16位立即数,表示程序存储器地址。
&程序计数器的值可以通过复位操作、顺序执行指令、分支转移,累加器转移,块重复,子程序调用,从累加器调用子程序,中断等操作改变。
9.9C54xDSP芯片采用了6级流水线的工作方式,即一条指令分为预取指、取指、译码、寻址、读数和执行6个阶段。
10.解决MMR写操作的流水线冲突时,一般可用采用推荐指令和插入空操作指令的方法。
11.'C54x DSP定时器由3个16位存储器映射寄存器组成:定时器寄存器(TIM)、定时器周期寄存器(PRD)和定时器控制寄存器(TCR)。
12.主机接口(HPI, Host Port Interface)是TMS320C54x系列定点芯片内部具有的一种接口部件,主要用于DSP与其他总线或CPU进行通信。
13「C54x DSP的指令系统有助记符指令和代数指令两种形式。
dsp技术复习题
dsp技术复习题DSP技术复习题DSP(数字信号处理)技术是一种将模拟信号转换为数字信号并对其进行处理的技术。
它在现代通信、音频处理、图像处理和控制系统中得到广泛应用。
为了更好地理解和掌握DSP技术,接下来将通过一些复习题来回顾和巩固相关知识。
1. 什么是采样定理?为什么需要采样定理?采样定理是指在进行模拟信号转换为数字信号时,采样频率必须大于被采样信号最高频率的两倍。
这是为了避免采样信号中出现混叠现象,即高于采样频率一半的频率成分出现在低于采样频率一半的频率范围内,导致信号失真。
2. 什么是离散时间信号和连续时间信号?离散时间信号是在离散时间点上采样得到的信号,通常用序列表示。
而连续时间信号是在连续时间上的信号,通常用函数表示。
3. 什么是离散傅里叶变换(DFT)和快速傅里叶变换(FFT)?离散傅里叶变换(DFT)是将离散时间域信号转换为离散频率域信号的过程。
它通过计算信号的各个频率分量的幅度和相位信息,用于频域分析和滤波等操作。
而快速傅里叶变换(FFT)是一种高效计算DFT的算法,通过分治法将DFT 计算复杂度从O(N^2)降低到O(NlogN),在实际应用中得到广泛使用。
4. 什么是滤波器?有哪些常见的滤波器类型?滤波器是一种用于改变信号频率响应的设备或算法。
常见的滤波器类型包括低通滤波器、高通滤波器、带通滤波器和带阻滤波器。
低通滤波器允许低频信号通过而抑制高频信号,高通滤波器则相反,带通滤波器允许某一频带的信号通过而抑制其他频带的信号,带阻滤波器则相反。
5. 什么是卷积运算?它在DSP中的作用是什么?卷积运算是一种将两个函数融合在一起的数学运算。
在DSP中,卷积运算被广泛用于信号滤波、系统响应和信号处理等方面。
它可以通过将输入信号与系统的冲激响应进行卷积来得到输出信号,从而实现信号的处理和分析。
6. 什么是量化误差?如何减小量化误差?量化误差是指将连续信号转换为离散信号时产生的误差。
它是由于离散化过程中无法完美地表示连续信号而引起的。
DSP复习资料+习题+答案
DSP复习资料+习题+答案1、定点DSP:数据以定点格式⼯作的DSP芯⽚称为定点DSP芯⽚,该芯⽚简单、成本较低。
两种基本表⽰⽅法:整数表⽰⽅法:主要⽤于控制操作、地址计算和其他⾮信号处理的应⽤。
⼩数表⽰⽅法:主要⽤于数字和各种信号处理算法的计算中。
定点表⽰并不意味着⼀定是整数表⽰。
2、浮点DSP:数据以浮点格式⼯作的DSP芯⽚称为浮点DSP芯⽚,该芯⽚运算精度⾼、运⾏速度快。
浮点数在运算中,表⽰数的范围由于其指数可⾃动调节,因此可避免数的规格化和溢出等问题。
但浮点DSP⼀般⽐定点DSP复杂,成本较⾼。
3、TI公司常⽤的DSP芯⽚可以归纳为三⼤系列:TMS320C2000系列:TMS320C2xx/C24x/C28x等;TMS320C5000系列:TMS320C54x/C55x等;TMS320C6000系列:TMS320C62x/C67x/C64x4、在对I/O空间访问时,除了使⽤数据总线和地址总线外,还要⽤到IOSTRB、IS和I/W控制线。
5、C54x C语⾔相同点:1)结构化程序设计的思想,以函数为单位2)⼤部分变量、常量、结构体、枚举、联合体、指针的定义3)局部变量、全局变量、静态变量、动态变量4)宏定义、宏展开、宏调⽤5)算术、关系、逻辑、位操作运算符以及运算符之间的优先级和结合性6)函数的组织:顺序结构、分⽀结构、循环结构不同点:1)所处理数据的性质不同;程序结构不同PC :采集好的,数据量⼤;DSP:实时采集,量⼩2)数据的输⼊输出设备不同3)死循环”的对待上不同。
4)语法结构及细节上的不同6、汇编器有5条伪指令可识别汇编语⾔程序的各个部分:.bss 为未初始化的变量保留空间;.data 通常包含了初始化的数据;.sect 定义已初始化的命名段,其后的数据存⼊该段;.text 该段包含了可执⾏的代码;.usect 在⼀个未初始化的有命名的段中为变量保留空间。
7、段的处理链接器在处理段的时候,有如下2个主要任务:(1)将由汇编器产⽣的的⼀个或多个.obj⽂件链接成⼀个可执⾏的.out⽂件;(2)重新定位,将输出的段分配到相应的存储器空间。
dsp习题及答案

dsp习题及答案
DSP习题及答案
数字信号处理(DSP)是一门重要的电子学科,它涉及数字信号的获取、处理和传输。
在学习DSP的过程中,习题是非常重要的一部分,通过习题的练习可以加深对知识点的理解和掌握。
下面我们将为大家提供一些常见的DSP习题及答案,希望能够帮助大家更好地学习和掌握这门学科。
1. 什么是数字信号处理?
答:数字信号处理是指对数字信号进行获取、处理和传输的过程,它涉及到数字信号的采样、量化、编码和解码等过程。
2. 什么是数字滤波器?
答:数字滤波器是一种用于处理数字信号的滤波器,它可以对数字信号进行滤波处理,包括低通滤波、高通滤波、带通滤波和带阻滤波等。
3. 什么是数字信号的采样频率?
答:数字信号的采样频率是指每秒钟对信号进行采样的次数,它决定了信号的带宽和分辨率。
4. 什么是数字信号的傅里叶变换?
答:数字信号的傅里叶变换是指将信号从时域转换到频域的过程,它可以将信号分解成不同频率的正弦波和余弦波的叠加。
5. 什么是数字信号的量化误差?
答:数字信号的量化误差是指信号经过模数转换后与原始信号之间的差异,它会对信号的质量产生影响。
通过以上习题及答案的学习,我们可以更好地理解和掌握数字信号处理的基本
概念和原理。
希望大家在学习DSP的过程中能够多加练习,不断提高自己的理解和应用能力,为将来的工作和学习打下坚实的基础。
dsp考试题及答案

dsp考试题及答案一、单项选择题(每题2分,共20分)1. 在数字信号处理中,离散时间信号是指()。
A. 连续时间、连续幅度的信号B. 离散时间、连续幅度的信号C. 离散时间、离散幅度的信号D. 连续时间、离散幅度的信号答案:C2. 离散傅里叶变换(DFT)的周期是()。
A. NB. 2NC. N/2D. 2N/3答案:A3. 快速傅里叶变换(FFT)算法的主要优点是()。
A. 计算精度高B. 计算速度快C. 易于编程实现D. 占用存储空间小答案:B4. 线性时不变(LTI)系统的最基本性质是()。
A. 线性B. 时不变性C. 因果性D. 稳定性答案:A5. 如果一个离散时间信号x[n]是实数,那么它的傅里叶变换X(e^jω)是()。
A. 实数B. 虚数C. 共轭对称的D. 共轭反对称的答案:C6. 窗函数的主要作用是()。
A. 滤波B. 放大C. 降低频谱泄漏D. 压缩信号答案:C7. 在数字滤波器设计中,巴特沃斯滤波器的特点是()。
A. 最大峰值B. 最小相位C. 最小通带波动D. 最大阻带衰减答案:C8. 离散时间信号的采样定理要求采样频率至少是信号最高频率的()。
A. 1倍B. 2倍C. 4倍D. 10倍答案:B9. 离散时间信号的Z变换是连续时间信号傅里叶变换的()。
A. 时域表示B. 频域表示C. 复频域表示D. 时频域表示答案:C10. 离散时间信号的希尔伯特变换用于()。
A. 滤波B. 调制C. 信号分析D. 信号的解析表示答案:D二、填空题(每题2分,共20分)1. 数字信号处理中的DFT是将离散时间信号从时域变换到______域。
答案:频域2. 一个离散时间信号x[n]的周期为N,则其DFT的周期为______。
答案:N3. 快速傅里叶变换(FFT)算法中,Cooley-Tukey算法是一种基于______分解的FFT算法。
答案:分而治之4. 线性时不变(LTI)系统的冲击响应h[n]与系统的频率响应H(e^jω)之间的关系是______。
DSP课后答案(期末复习资料
1 .1 数字信号处理器与一般通用计算机和单片机的主要差别有哪些?答:在通用的计算机上用软件实现该方法速度太慢, 适于算法仿真;在通用计算机系统上加上专用的加速处理机实现该方法专用性较强,应用受限制,且不便于系统的独立运行;用通用的单片机实现这种方式多用于一些不太复杂的数字信号处理,如简单的PID控制算法;用通用的可编程DSP芯片实现与单片机相比,DSP芯片具有更加适合于数字信号处理的软件及硬件资源,可用于复杂的数字信号处理算法;用专用的DSP芯片实现在一些特殊场合, 要求信号处理速度极高, 用通用的DSP 芯片很难实现,而专用的DSP 芯片可以将相应的信号处理算法在芯片内部用硬件实现,不需要编程。
1 .4 什么是冯·诺埃曼结构计算机, 什么是哈佛结构计算机, 二者的特点是什么?答:冯.诺曼结构:将指令、数据存储在同一个存储器中,统一编址,译稿指令计数器提供的地址来区分是指令还是数据。
取指令和取数据都访问统一存储器,数据吞吐率低。
哈佛结构:程序和数据存储在不同的存储空间,程序存储空间和数据存储空间是两个相互独立的存储空间,每个存储空间独立编址,独立访问。
1 .8 DSP的工作电压越来越低,内核电压已低至1V,这样做有何意义?为什么DSP内核工作电压和I/O工作电压不一样?答:集成电路速度越来越快,随之而来,功耗越来越大,这样散热就是很大的问题.在芯片走线尺寸不变的情况下,内部阻抗也不变,降低工作电压会降低功耗,这样能再较高频率下芯片发热较少。
内核不容易受到外部干扰,所以电压可以做的较低,但IO容易受外部信号干扰,保持较高电压容易是器件工作稳定,这是功耗和稳定性的折中。
1 .10 定点DSP和浮点DSP有什么区别?在具体应用中, 应如何选择?答:在浮点DSP中,数据即可以表示成整数,也可以表示成浮点数。
浮点数在运算中,表示数的范围由于其指数可自动调节,因此可避免数的规格化和溢出等问题。
但浮点DSP 一般比定点DSP 复杂, 成本也较高。
《数字信号处理(第四版)》部分课后习题解答
《数字信号处理(第四版)》部分课后习题解答一、简答题1. 什么是数字信号处理?数字信号处理(DSP)是指对数字信号进行处理和分析的一种技术。
它使用数学和算法处理模拟信号,从而实现信号的采样、量化、编码、存储和重构等过程。
DSP广泛应用于通信、音频处理、图像处理和控制系统中。
2. 数字信号处理的主要特点有哪些?•数字信号处理能够处理和分析具有广泛频谱范围的信号。
•数字信号处理能够实现高精度的信号处理和复杂的算法运算。
•数字信号处理能够实现信号的存储、传输和复原等功能。
•数字信号处理可以利用计算机等处理硬件进行实时处理和系统集成。
3. 数字信号处理的基本原理是什么?数字信号处理的基本原理是将连续时间的模拟信号转换成离散时间的数字信号,然后通过一系列的算法对数字信号进行处理和分析。
该过程主要涉及信号的采样、量化和编码等环节。
4. 什么是离散时间信号?离散时间信号是指信号的取样点在时间上呈现离散的情况。
在离散时间信号中,只能在离散时间点上获取信号的取样值,而无法观测到连续时间上的信号变化。
5. 描述离散时间信号的功率和能量的计算方法。
对于离散时间信号,其功率和能量的计算方法如下:•功率:对于离散时间信号x(n),其功率可以通过求平方和的平均值来计算,即功率P = lim(T->∞) [1/T *∑|x(n)|^2],其中T表示信号x(n)的观测时间。
•能量:对于离散时间信号x(n),其能量可以通过求平方和来计算,即能量E = ∑|x(n)|^2。
二、计算题1. 设有一个离散时间周期序列x(n) = [2, 3, -1, 4, 0, -2],求其周期N。
由于x(n)是一个周期序列,我们可以通过观察序列来确定其周期。
根据观察x(n)的取值,我们可以发现序列在n=1和n=5两个位置上取得了相同的数值。
因此,序列x(n)的周期为N = 5 - 1 = 4。
2. 设有一个信号x(t) = 2sin(3t + π/4),请将其离散化为离散时间信号x(n)。
(完整版)数字信号处理复习题-答案
7.对正弦信号进行采样得到的正弦序列一定是周期序列。 ( × ) 8.数字信号处理仅仅指的是数字处理器。 ( × )
9.信号处理的两种基本方法:一是放大信号,二是变换信号。 ( × ) 10.在时域对连续信号进行抽样,在频域中,所得频 谱是原信号频谱的周期延拓。( × ) 四、简答题
1.用DFT 对连续信号进行谱分析的误差问题有哪些?
答:混叠失真;截断效应(频谱泄漏);栅栏效应
2.画出模拟信号数字化处理框图,并简要说明框图中每一部分的功能作用。 答
第1部分:滤除模拟信号高频部分;第2部分:模拟信号经抽样变为离散信号;第3部分:按照预制要求对数字信号处理加工; 第4部分:数字信号变为模拟信号;第5部分:滤除高频部分,平滑模拟信号。
4.设线性时不变系统的单位脉冲响应h(n)和输入序列x(n),如下图所示,要求分别用图解法和列表法求输出y(n),并画出波形 一、填空题: 1、一线性时不变系统,输入为 x (n )时,输出为y (n ) ;则输入为2x (n )时,输出为 2y(n) ;输入为x (n-3)时,输出为 y(n-3) 。 2、从奈奎斯特采样定理得出,要使实信号采样后能够不失真还原,采样频率f 与信号最高频率fs 关系为: f ≥2fs 。 3、已知一个长度为N 的序列x(n),它的傅立叶变换为X (e jw ),它的N 点离散傅立叶变换X (K )是关于X (e jw )的 N 点等间隔 抽样 。 4、3()5cos()78x n n π π=-的周期为 14 。 5、2()5cos()78 xnnπ π=-的周期为 7 。 6、若正弦序列x(n)=sin(30n π/120)是周期的,则周期是N= 8 。 7、序列()8 ()n jxne π-=是否为周期序列 否 。 8、无限长单位冲激响应滤波器的基本结构有直接Ⅰ 型,直接Ⅱ 型,_级联型_和_并联型_四种。 9、DFT 与DFS 有密切关系,因为有限长序列可以看成周期序列的___主值序列__,而周期序列可以看成有限长序列的_周期 序列 __。 10、对长度为N 的序列x(n)圆周移位m 位得到的序列用x m (n)表示,其数学表达式为x m (n)=__ x((n+m))N R N (n)___。 二、选择填空题 1、δ(n)的z 变换是( A ) A. 1 B.δ(w) C. 2πδ(w) D. 2π 2、序列x 1(n)的长度为4,序列x 2(n)的长度为3,则它们线性卷积的长度是(), 5点圆周卷积的长度是( B )。 A. 5, 5 B. 6, 5 C. 6, 6 D. 7, 5 3、在N=32的时间抽取法FFT 运算流图中,从x(n)到X(k)需( B )级蝶形运算
dsp技术及应用试题及答案(一)
dsp技术及应用试题及答案(一)dsp技术及应用试题及答案【一】 1.1 DSP的概念是什么?本书说指的DSP是什么?答:DSP有两个概念。
一是数字信号处理(Digital Signal Processing),指以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理;二是数字信号处理器(Digital Signal Processor),指是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号处理算法。
本书中的DSP主要指后者,讲述数字信号处理器的应用。
1.2 什么是哈佛结构和冯•诺伊曼结构?它们有什么区别?答:(1) 冯·诺伊曼(Von Neuman)结构该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。
当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。
(2)哈佛(Harvard)结构该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
1.3 已知一个16进制数3000H,若该数分别用Q0、Q5、Q15表示,试计算该数的大小。
答:3000H=12288。
若用Q0表示,则该数就是12288;若用Q5表示,则该数就是12288*2-5=384;若用Q15表示,则该数就是12288*2-15=0.3751.4 若某一个变量用Q10表示,试计算该变量所能表示的数值范围和精度。
答:Q10能表示的数值范围是-32~31.9990234,其精度为2-101.5 若x=0.4567,试分别用Q15、Q14、Q5将该数转换为定点数。
答:Q15:x*215=int(0.4567*32768)=14965;Q14:x*214=int(0.4567*16384)=7482;Q5:x*25=int(0.4567*32)=14。
dsp复习题及答案
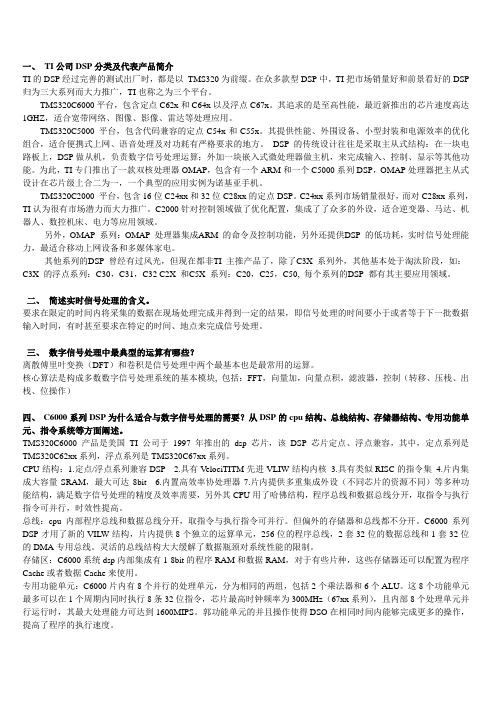
一、TI公司DSP分类及代表产品简介TI的DSP经过完善的测试出厂时,都是以TMS320为前缀。
在众多款型DSP中,TI把市场销量好和前景看好的DSP 归为三大系列而大力推广,TI也称之为三个平台。
TMS320C6000平台,包含定点C62x和C64x以及浮点C67x。
其追求的是至高性能,最近新推出的芯片速度高达1GHZ,适合宽带网络、图像、影像、雷达等处理应用。
TMS320C5000 平台,包含代码兼容的定点C54x和C55x。
其提供性能、外围设备、小型封装和电源效率的优化组合,适合便携式上网、语音处理及对功耗有严格要求的地方。
DSP的传统设计往往是采取主从式结构:在一块电路板上,DSP做从机,负责数字信号处理运算;外加一块嵌入式微处理器做主机,来完成输入、控制、显示等其他功能。
为此,TI专门推出了一款双核处理器OMAP,包含有一个ARM和一个C5000系列DSP,OMAP处理器把主从式设计在芯片级上合二为一,一个典型的应用实例为诺基亚手机。
TMS320C2000 平台,包含16位C24xx和32位C28xx的定点DSP。
C24xx系列市场销量很好,而对C28xx系列,TI认为很有市场潜力而大力推广。
C2000针对控制领域做了优化配置,集成了了众多的外设,适合逆变器、马达、机器人、数控机床、电力等应用领域。
另外,OMAP 系列:OMAP 处理器集成ARM 的命令及控制功能,另外还提供DSP 的低功耗,实时信号处理能力,最适合移动上网设备和多媒体家电。
其他系列的DSP 曾经有过风光,但现在都非TI 主推产品了,除了C3X 系列外,其他基本处于淘汰阶段,如:C3X 的浮点系列:C30,C31,C32 C2X 和C5X 系列:C20,C25,C50, 每个系列的DSP 都有其主要应用领域。
二、简述实时信号处理的含义。
要求在限定的时间内将采集的数据在现场处理完成并得到一定的结果,即信号处理的时间要小于或者等于下一批数据输入时间,有时甚至要求在特定的时间、地点来完成信号处理。
DSP课后习题答案1(精)
第一章:答:数字信号处理的实现是用硬件软件或软硬结合的方法来实现各种算法。
(1 在通用的计算机上用软件实现;(2 在通用计算机系统中加上专用的加速处理机实现;(3 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理,如数字控制;(4 用通用的可编程DSP 芯片实现。
与单片机相比,DSP 芯片具有更加适合于数字信号处理的软件和硬件资源,可用于复杂的数字信号处理算法;(5 用专用的DSP 芯片实现。
在一些特殊的场合,要求的信号处理速度极高,用通用DSP 芯片很难实现(6)用基于通用dsp 核的asic 芯片实现。
答:第一阶段,DSP 的雏形阶段(1980年前后)。
代表产品:S2811。
主要用途:军事或航空航天部门。
第二阶段,DSP 的成熟阶段(1990年前后)。
代表产品:TI 公司的TMS320C20 主要用途:通信、计算机领域。
第三阶段,DSP 的完善阶段(2000年以后)。
代表产品:TI 公司的TMS320C54主要用途:各个行业领域。
答:1、采用哈佛结构(1)冯。
诺依曼结构,(2)哈佛结构(3)改进型哈佛结构2、采用多总线结构3. 采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的dsp 指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗答:哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
冯。
诺依曼结构:该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。
当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。
区别:哈佛:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
21世纪高等院校电子信息类规划教材省高等学校“十二五”省级规划教材数字信号处理与DSP实现技术课后习题与参考答案主编:帅副主编:晓波师学院2015.11第1章绪论思考题1.什么是数字信号?2.什么是数字信号处理?3.数字信号处理系统的实现方法有哪些?4.数字信号处理有哪些应用?5.数字信号处理包含哪些容?6.数字信号处理的特点是什么?第1章 绪论参考答案1.时间和幅度都离散的信号称为数字信号,即信号的时间取离散的值,幅度也取离散的值。
2.数字信号处理是指在数字领域进行数字信号的加工(变换、运算等),即输入是数字信号,采用数字信号处理方法进行处理,输出仍然是数字信号。
3.数字信号处理系统的实现方法有①通用软件方法实现系统;②专用加速处理机方法;③软硬件结合的嵌入式处理方法;④硬件方法。
4.数字信号处理在通信、计算机网络、雷达、自动控制、地球物理、声学、天文、生物医学、消费电子产品等各个领域均有应用,是信息产业的核心技术之一。
比如信源编码、信道编码、多路复用、数据压缩,数字语音、汽车多媒体、MP3/MP4/MP5、数字扫面仪、数字电视机顶盒、医院监视系统、生物指纹系统等。
5.数字信号处理主要包含以下几个方面的容①离散线性时不变系统理论。
包括时域、频域、各种变换域。
②频谱分析。
FFT 谱分析方法及统计分析方法,也包括有限字长效应谱分析。
③数字滤波器设计及滤波过程的实现(包括有限字长效应)。
④时频-信号分析(短时傅氏变换),小波变换,时-频能量分布。
⑤多维信号处理(压缩与编码及其在多煤体中的应用)。
⑥非线性信号处理。
⑦随机信号处理。
⑧模式识别人工神经网络。
⑨信号处理单片机(DSP)及各种专用芯片(ASIC),信号处理系统实现。
6.数字信号处理主要具有4个方面优点:①数字信号精度高;②数字信号处理灵活性强;③数字信号处理可实现模拟信号难以实现的特性;④数字信号处理可以实现多维信号处理。
数字信号处理主要存在3个方面缺点:①需要模拟接口等增加了系统复杂性;②由于取样定理的约束其应用的频率受到限制;③功耗大。
第2章 离散时间信号与系统思考题1.序列的表示方法有哪几种?答:枚举表示;公式表示;图像表示2.已知序列⎩⎨⎧<+-≥++=0,50,1)(2n n n n n n x ,求序列的反褶序列)(n x -、时延序列)2(-n x 。
答:21,0()5,0n n n x n n n ⎧-+≤-=⎨+>⎩,22(2)(2)1,20(2)(2)5,2033,27,2n n n x n n n n n n n n ⎧-+-+-≥-=⎨--+-<⎩⎧-+≥=⎨-+<⎩ 3.判断下列序列是否是周期序列,若是周期序列则求出其周期。
(1))532cos()(-=n A n x π (2))371cos()(ππ+=n A n x (3))132()(+=n j e n x π (4))352()(π+=n j e n x解:(1)假设N 为序列周期,则2()cos[()5]322cos[(5)]33x n N A n N A n N πππ+=+-=-+且要求满足2()cos(5)322()cos[(5)]33x n A n x n N A n N πππ=-≡+=-+ 根据余弦函数性质,则必须满足:22,2,1,0,1,2,3N k k ππ==--L L 才能使上式恒等。
于是:3,2,1,0,1,2,N k k ==--L L取最小的正整数N=3,于是序列为周期序列,且周期为3。
(2)解:假设N 为序列周期,则 111()cos[()]cos[()]73737x n N A n N A n N πππππ+=++=++且要求满足 111()cos()()cos[()]73737x n A n x n N A n N πππππ=+≡+=++ 根据余弦函数性质,则必须满足:12,2,1,0,1,2,7N k k ππ==--L L 才能使上式恒等。
于是:14,2,1,0,1,2,N k k ==--L L取最小的正整数N=14,于是序列为周期序列,且周期为14。
(3)假设N 为序列周期,则222[()1]1333().j n N j n j N x n N ee e πππ++++== 且要求满足222(1)1333()().j n j n j N x n ex n N e e πππ++=≡+= 则必须满足231j N e π=才能使上式恒等。
根据欧拉公式得到:2322cos()sin()133j N e N j N πππ=+=,因此必须22,2,1,0,1,2,3N k k ππ==--L L 于是:3,2,1,0,1,2,N k k ==--L L取最小的正整数N=3,于是序列为周期序列,且周期为3。
(4)假设N 为序列周期,则22222[()3][(3)](3)55555().j n N j n N j n j N x n N ee e e πππ++++++=== 且要求满足222(3)(3)555()().j n j n j N x n ex n N e e ππ++=≡+= 则必须满足251j N e =才能使上式恒等。
根据欧拉公式得到:2522cos()sin()155j N e N j N =+=,因此必须22,2,1,0,1,2,5N k k π==--L L 于是:5,2,1,0,1,2,N k k π==--L L由于N 和k 都为整数,因此上式不可能成立。
因此,序列不是周期序列。
4.求下式的卷积:(1)①)(*)(n n δδ (2))(*)(n u n u (3))(*)(n n u δ(4))(*)(n R n R N N (5))(*)(n n R N δ (6))(*)(n u n R N5.已知:3,0()0,0n n x n n ⎧≥=⎨<⎩,5,0()0,0n n z n n ⎧-≥=⎨<⎩,求()*()x n z n 的卷积表达式。
解:3,0()0,0m m x m m ⎧≥=⎨<⎩,5,0()0,0m m z m m -⎧-≤-=⎨>⎩,5,()0,n m n m z n m n m-⎧-≥-=⎨<⎩01011()*()[()()][3(5)]31(3/5)5(),05,0513/50,00,035,0220,0n m n m m m m n n n n m n n x n z n x m z n m n n n n n n ∞-=-∞=+=++=-=⨯-⎧⎧--≥-≥⎪⎪==-⎨⎨⎪⎪<<⎩⎩⎧-≥⎪=⎨⎪<⎩∑∑∑ 6. 判断系统的线性性、移不变性(1))0()]([n n x n x T -= (2))3()]([n x n x T =(3))()2()]([n x n x n x T -+= (4)()[()]x n T x n na =解:(1)设111()[()](0)y n T x n x n n ==-,222()[()](0)y n T x n x n n ==-则1210201212[()()]()()[()][()]()()T ax n bx n ax n n bx n n aT x n bT x n ay n by n +=-+-=+=+,所以系统为线性系统设()[()]y n T x n =,则()(0)y n x n n =-,()(0)y n k x n k n -=--,另一方面,[()](0)T x n k x n k n -=--,即()[()]y n k T x n k -=-,所以系统为移不变系统。
(2)设111()[()](3)y n T x n x n ==,222()[()](3)y n T x n x n ==则12121212[()()](3)(3)[()][()]()()T ax n bx n ax n bx n aT x n bT x n ay n by n +=+=+=+,所以系统为线性系统设()[()]y n T x n =,则()(3)y n x n =,()(3())(33)y n k x n k x n k -=-=-,另一方面,[()](3)T x n k x n k -=-,即()[()]y n k T x n k -≠-,所以系统为移变系统。
(3)设1111()[()](2)()y n T x n x n x n ==+-,2222()[()](2)()y n T x n x n x n ==+-则12121211221212[()()](2)(2)[()()][(2)()][(2)()][()][()]()()T ax n bx n ax n bx n ax n bx n a x n x n b x n x n aT x n bT x n ay n by n +=+++-+=+-++-=+=+,所以系统为线性系统设()[()]y n T x n =,则()(2)()y n x n x n =+-,()(2)()y n k x n k x n k -=-+--另一方面,[()](2)()T x n k x n k x n k -=-+--,即()[()]y n k T x n k -=-,所以系统为移不变系统。
(4)设1()11()[()]x n y n T x n na==, 2()11()[()]x n y n T x n na == 则1212()()()()1212[()()].{[()]}.{[()]}bx n cx n bx n cx n b c T bx n cx n na na a n T x n T x n ++===,所以系统为非线性系统 设()[()]y n T x n =,则()()x n y n na=,()()()x n k y n k n k a --=- 而()[()]()x n k T x n k na y n k --=≠-,所以系统为时变系统。
7.已知系统的单位抽样响应如下,判断系统的因果性、稳定性。
(1))(n u - (2))(2n u n -(3))(n -δ (4))(1n u n解:(1)因为0()()0n h n u n <=-≠时,,故系统为非因果系统又0|()|()n n h n u n ∞=-∞=-∞=-→∞∑∑,故系统不稳定 (2)因为0()2()0n n h n u n <=-≠时,,故系统为非因果系统 又0011|()|2()2210.5n n n n n h n ∞∞=-∞=-∞=====-∑∑∑,故系统稳定 (3)因为0()0n h n <=时,,故系统为因果系统又|()|1n h n ∞=-∞=∑,故系统稳定 (4)因为0()0n h n <=时,,故系统为因果系统 又0111|()|1......2n n h n n n ∞∞=-∞===++++<∞∑∑,故系统稳定 8.一个因果系统由以下差分方程表示为:()2(1)()3(1)y n y n x n x n +-=--(1)求系统的单位抽样响应;(2)已知输入为ωjn e n x =)(,求输出响应。