曲面拟合原理与实例
matlab曲线曲面拟合讲解及实例

例如:
x1=[1.0500 1.0520 1.0530 1.0900 1.0990 1.1020 1.1240 1.1420...
1.1490 1.0500 1.0520 1.0530 1.0900 1.0990 1.1020 1.1240 1.1420 1.1490];
x2=[3.8500 1.6500 2.7500 5.5000 7.7000 3.3000 4.9500 8.2500 11.5500...
52.5000 62.0000];
data=[x1;x2]; ห้องสมุดไป่ตู้ %类似于将x1 x2整合成一个2维数组。
a0= [-0.0014,0.07];
option=optimset('MaxFunEvals',5000);
format long;
同理用Symbolic Math Toolbox可以直接执行
>> ezmesh('X.^2 - Y.^2', [-2 2], [-2 2])
surf函数
在函数不能表示成z = f(x, y)时,需要用surf函数。比如x2+y2+z2=1.
先需要用柱面坐标或者球坐标来表示。这里用柱面坐标表示为 r2+z2=1
x = sqrt(1-z2)cosθ, x = sqrt(1-z2)sinθ;
执行matlab指令:
>> [theta, Z] = meshgrid((0:0.1:2)*pi, (-1:0.1:1));
>> X =sqrt(1 - Z.^2).*cos(theta);
>> Y =sqrt(1 - Z.^2).*sin(theta);
思拓力加权平均 平面拟合 曲面拟合 垂直平差

思拓力加权平均平面拟合曲面拟合垂直平差思拓力加权平均,平面拟合,曲面拟合,垂直平差是地球物理勘探中常用的数据处理技术。
本文将详细介绍这些技术的原理、应用和优缺点。
思拓力加权平均是处理GPS数据时经常使用的方法之一。
在实际情况中,由于各种误差的存在,每次测量所得的数据极其不稳定,这就需要采取一定的方法来消除这些误差。
思拓力加权平均是一种最小二乘法,是一种能够消除后验误差的参数估计法。
通过这种方法,可以得到更加精准的GPS观测结果,从而提高勘探的准确度和效率。
平面拟合是另一种常用的数据处理方法。
在地球物理勘探中,经常遇到一些复杂的地形和地貌,这就需要进行平面拟合,以方便对地形和地貌进行分析和研究。
平面拟合可以对大量的数据进行处理,并将这些数据最终汇集到一个平面上,以方便对这些数据进行分析和处理,从而得到准确的结果。
平面拟合可以用于处理地图、图像等各种数据,是一个非常重要的技术。
曲面拟合是一个加强版的平面拟合。
在地球物理勘探中,我们经常需要处理的是比较复杂的地形和地貌,因此平面拟合并不能满足我们的需求。
曲面拟合可以更好地适应各种复杂的地形和地貌,可以得到更加准确的结果。
曲面拟合是一种用于处理空间数据的重要方法,可以处理各种三维数据,例如地形图、地球模型等等。
垂直平差是一种用于高精度测量数据处理的方法。
在地球物理勘探中,垂直平差是处理GPS测量数据的一种重要技术。
它是一种非常精确的计算方法,通过将已知数据和未知数据结合起来,从而得到准确的结果。
垂直平差可以用于处理各种复杂的地形和地貌,可以精确到毫米级别的计算,是地球物理勘探中不可或缺的方法之一。
综上所述,思拓力加权平均,平面拟合,曲面拟合,垂直平差是地球物理勘探中常用的数据处理技术。
它们的优点在于可以准确地处理大量的数据,得到精确的结果。
缺点在于可能需要专业的软件和设备支持,有一定的学习门槛。
对于地球物理勘探工作者而言,熟练运用这些技术能够提高工作效率、提高勘探的准确性,为地球物理勘探事业的发展做出更大的贡献。
基于局部曲面拟合法

基于局部曲面拟合法
基于局部曲面拟合法是一种图形处理技术,它可以对图像中的特征的几何形状进行拟合,以获得最佳的几何特征表达。
局部曲面拟合法主要用于图像处理中的几何特性检测,其可以有效地构建出特征的精确结构表达。
局部曲面拟合法主要是通过拟合出合适的局部曲面,计算得到最佳的拟合曲面,以拟合图像中的特征。
具体来说,首先计算出曲面的三角剖分,然后按照局部曲面拟合的原理拟合出最佳曲面。
相比于其他拟合方法,局部曲面拟合法可以更好地描述几何特征,并可以可靠地定位几何特征。
局部曲面拟合法的精确度取决于输入的点集精度,因此,在多视图三维重构中,这种方法非常有用。
多视图三维重构可以重新构造出物体的三维几何形状,但是由于多个视图的投影误差,重构的三角分割精度不如期望值。
局部曲面拟合可以有效的改善这一问题,它可以起到可靠的三维几何表达,而且是一种高效的拟合方法。
此外,局部曲面拟合还可以应用于物体分割、对象检测和跟踪等应用领域。
物体分割是一种分离输入图像中不同物体的技术,它可以帮助更好地描述场景中的物体,从而有助于更准确地识别出输入图像中的物体。
局部曲面拟合可以有效地提取出更多的几何特征,从而更好地进行物体分割。
此外,在对象检测和跟踪中,局部曲面拟合可以有效提取出目标物体的特征,用于更准确地识别和跟踪物体。
总而言之,局部曲面拟合法可以有效构建出特征的精确结构表达,
这种方法可以用于多视图三维重构、物体分割、对象检测和跟踪等应用领域,在这些应用中都可以得到良好的结果。
拟合曲面函数

拟合曲面函数拟合曲面函数是数据分析中一项重要的技术,用于通过已知的数据点来建立一个连续的曲面函数。
在实际应用中,拟合曲面函数通常用于曲面拟合、数据可视化及预测等方面。
本文将介绍拟合曲面函数的相关知识。
1、什么是曲面拟合?曲面拟合是指用一个函数表示一组数据点所在的曲面。
它是拟合算法中的一种常见形式。
曲面拟合可以用于描绘地形、海洋气象、建筑设计等问题中。
其基本思想是,在误差最小化的约束下,尽可能地逼近数据点所在的曲面。
曲面拟合的理论基础是多项式拟合和最小二乘法。
2、曲面拟合的类型(1) 多项式拟合:多项式拟合是将数据点拟合到一条曲线或曲面上。
它的优点是较为简单,但是拟合的精度不如其他方法,不能适用于复杂的数据情况。
(2) 核函数方法:核函数方法是一种非参数方法,利用核函数对数据点进行进行拟合,适用于异常值较多的复杂数据情况。
(3) 计算机图形学方法:计算机图形学方法主要适用于曲面拟合和模型近似问题,它将数据表达为曲面网格,并对曲面进行分段处理,适用于采样有密度梯度的曲面。
3、曲面拟合方法(1) 插值法:在已知数据点间插值,得到一个连续的曲面。
插值法的优点是可以完全保证数据点被准确地拟合,但是对输入数据要求较高。
(2) 最小二乘法:使用最小二乘法模拟函数的拟合过程,得到一个拟合函数。
最小二乘法的优点是它对数据的要求不高,适用于大多数数据情况。
但是它不能完全保证数据点被准确地拟合,会产生一定的误差。
(3) 最大似然估计法:最大似然估计法是针对样本数据的拟合方法,通过优化统计模型参数,得到一个能够最优描述样本数据的模型。
最大似然估计法的优点是它可以根据数据情况选择不同的分布,适用于不同类型的数据。
二、基本步骤拟合曲面函数的基本步骤如下:1、读入数据:在拟合曲面函数之前,必须要读入一组有序的数据点。
2、选择拟合函数的类型:通过观察数据情况,根据实际需要选择适合的拟合函数类型。
4、确定拟合函数的参数:利用拟合方法,确定拟合函数的参数。
第五章 曲线拟合

)2
j 1
j 1 i0
对ak求偏导数(k=0,1…m)
ak
nm
2
(
ai
x
i j
j1 i0
y
j
)
x
k j
0
m
m
n
化简得
ai
xik j
y
j
x
k j
i0 j 1
j 1
n
n
记
x
k j
Sk
y
j
x
k j
Tk
j 1
j 1 m
aiSki Tk (k 0,1m)
i0
写成矩阵形式
S0 S1 S2 Sm S1 S2 S3 Sm1 S2 S3 S4 Sm2 Sm Sm1 Sm2 S mm
i1 j 1
i 1
用矩阵形式给出即: AT Ax ATb 法方程组
例
用最小二乘法解下列超定方程组的近似解
2x1 x2 1 8x1 4x2 0 2x1 x2 1 7x1 x2 8 4x1 3
解: A=
2 1 8 4 2 1 7 1 4 0
2 1
AT A
如何衡量接近程度?
最小二乘原理
一、什么是最小二乘原理
是衡量接近程度的一种方法
x x0 x1 xn 已知 y y0 y1 yn
设p(x) a0 a1x an xn
n
n
求a0 , a1,an 使 Ri2 (P(xi ) yi )2 最小。
io
i0
用最小二乘原理进行曲线拟合的方法称为最小二乘法。
这里(m<n),适当的选取 a0 , a`,am 使得
n
(a0 , a1,am ) [ p(x j ) y j ]2 为最小值 j 1
B样条曲面拟合

谢谢
这样的 节点矢量定义了一般非均匀B样条基.
分段贝齐尔曲线 其节点矢量中二端节点重复度与类型2相同, 为k+1。所不同的是,点数减1必 须等于次数的正整数倍,
二、曲面拟合的条件
待拟合曲面的控制点数 样条基次数 两个方向的节点向量
B样条曲面拟合
一、B样条曲线的种类及主要性质
均匀B样条曲线 均匀B样条曲线节点矢量中节点为沿参数轴 均匀或等距分布,所有节点区间长=Δi=ti+ti常数 >0(i=0,1,…,n+k)。这样的节点矢量定义了均匀 B样条基。 准均匀B样条曲线 其节点矢量中二端节点具有重复度k+1,即t0 =t1=…=tk,tn+1=tn+2=…=tn+k+1,所有内 节点均匀分布,重复度为1。
3、节点向量
节点向量是由数据点的参数化确定的,给定 曲面的数据点赋两个参数值,使位于拟和曲 面上的这些点与平面参数域内的点建立一一 对应的关系。 参数化的手段有:均与参数化、累加弦长参 数化、基面参数化。
得到数据点集的参数值后,就可以利用最小 二乘拟合反算曲面控制点
三、曲面拟合的实例
例1: 图1是一条三次B样条曲线与控制多 边形,符号“○”表示曲线初始控制点, “*”号表示曲线经一次4尺度加细后得到的 控制点,由图易见,加细后的控制点与曲线 更加接近。因此,可通过控制点的多尺度迭 代来生成B样条曲线增加了生成样条曲线的 速度。
例2 图2是利用第2节算法进行4尺度三层加细得 到的双三次B样条拟合曲面,0D为 (1+3)×(1+3)网格,经过三次4尺度加细 后3D为(64+3)×(64+3)网格,重建的B 样条曲面即有很好的光滑形状,又有很高的 逼近精度,同时,在上机实现时算法速度比 以前基于Binary细分多层加细算法的速度稍 快,主要由于减少了耗时的Step 2的次数。
曲面方程拟合算法 python
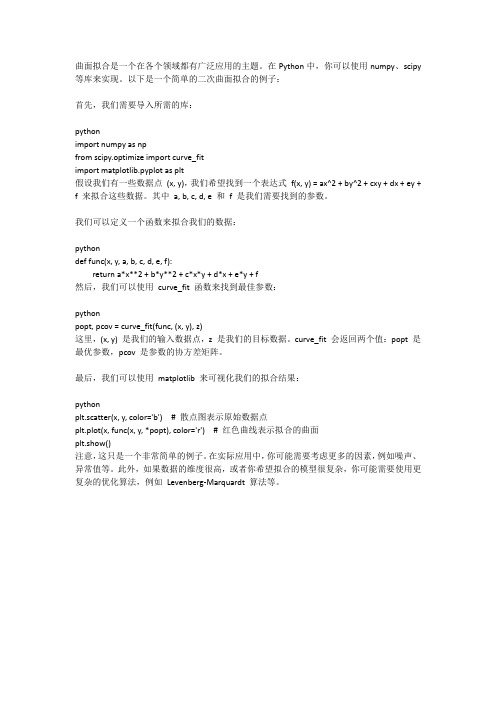
曲面拟合是一个在各个领域都有广泛应用的主题。
在Python中,你可以使用numpy、scipy 等库来实现。
以下是一个简单的二次曲面拟合的例子:首先,我们需要导入所需的库:pythonimport numpy as npfrom scipy.optimize import curve_fitimport matplotlib.pyplot as plt假设我们有一些数据点(x, y),我们希望找到一个表达式f(x, y) = ax^2 + by^2 + cxy + dx + ey + f 来拟合这些数据。
其中a, b, c, d, e 和f 是我们需要找到的参数。
我们可以定义一个函数来拟合我们的数据:pythondef func(x, y, a, b, c, d, e, f):return a*x**2 + b*y**2 + c*x*y + d*x + e*y + f然后,我们可以使用curve_fit 函数来找到最佳参数:pythonpopt, pcov = curve_fit(func, (x, y), z)这里,(x, y) 是我们的输入数据点,z 是我们的目标数据。
curve_fit 会返回两个值:popt 是最优参数,pcov 是参数的协方差矩阵。
最后,我们可以使用matplotlib 来可视化我们的拟合结果:pythonplt.scatter(x, y, color='b') # 散点图表示原始数据点plt.plot(x, func(x, y, *popt), color='r') # 红色曲线表示拟合的曲面plt.show()注意,这只是一个非常简单的例子。
在实际应用中,你可能需要考虑更多的因素,例如噪声、异常值等。
此外,如果数据的维度很高,或者你希望拟合的模型很复杂,你可能需要使用更复杂的优化算法,例如Levenberg-Marquardt 算法等。
曲面拟合是啥原理图的应用

曲面拟合是啥原理图的应用1. 曲面拟合的概念曲面拟合是一种数学建模技术,用于将一组离散点数据拟合成平滑的曲面。
它通过寻找最适合给定点集的曲面来实现数据的近似和拟合。
曲面拟合在计算机图形学、CAD/CAM、工程设计和地理信息系统等领域得到了广泛应用。
2. 曲面拟合的原理曲面拟合的原理基于数学最优化方法,旨在找到一个曲面模型,使其最接近给定的离散点数据。
常见的曲面拟合方法包括最小二乘法和样条曲面拟合等。
2.1 最小二乘法最小二乘法是曲面拟合中常用的一种方法。
它通过最小化数据点与曲面之间的距离来确定最佳拟合曲面。
最小二乘法可以分为线性最小二乘法和非线性最小二乘法。
2.1.1 线性最小二乘法线性最小二乘法适用于拟合线性模型的情况。
其基本原理是建立一个与数据点相匹配的线性模型,并通过最小化残差平方和来确定最佳拟合曲面。
线性最小二乘法的数学公式可以表示为:min E = Σ (yi - f(xi))^2其中,E为残差平方和,yi为实际观测值,f(xi)为线性模型的预测值。
2.1.2 非线性最小二乘法非线性最小二乘法适用于拟合非线性模型的情况。
其原理与线性最小二乘法类似,不过在计算残差平方和时,需要通过迭代的方式逼近最佳拟合结果。
非线性最小二乘法的数学公式可以表示为:min E = Σ (yi - f(xi;θ))^2其中,θ为模型参数,f(xi;θ)为非线性模型的预测值。
2.2 样条曲面拟合样条曲面拟合是一种使用控制点和插值方法构造曲面的技术。
它将拟合问题转化为一个插值问题,在给定的控制点上生成一个平滑的曲面。
样条曲面拟合的原理是通过插值方法将数据点与控制点相连,并在控制点上生成一个曲面模型,以实现数据的拟合。
3. 曲面拟合的应用曲面拟合在许多领域都有广泛的应用。
以下是一些常见的应用场景:•计算机图形学:曲面拟合可以用于生成光滑的曲线和曲面,用于渲染和动画效果的生成。
•CAD/CAM:曲面拟合可以用于设计和制造曲面形状的产品,例如汽车、飞机等。
2、曲面拟合及其应用

故障 方法1 方法2 融合1 故障 方法1 方法2 融合1
H1 0.025 0.062 0.042 H6 0.022 0.025 0.020
H2 0.071 0.071 0.038 H7 0.035 0.022 0.105
H3 0.086 0.050 0.021 H8 0.017 0.038 0.016
3、在变压器短路故障在线监测中的应用
由二维坐标( Ui,Uti) 决定的Pi在一平面上,可利用二次曲面 拟合方程,即二维回归方程来描述:
P 0 1U 2U t 3U 2 4UU t 5U t2 1
同理,对于考虑了压力因素的温度参量,二维回归方程描述为:
5、总结及展望
1、
介绍了曲面拟合的背景及在各个领域 的应用情况
总 结
2、
分析了曲面拟合的基本原理及其实现 方法,着重介绍了最小二乘曲面拟合
3、
采用曲面拟合法进行变压器短路故障 在线监测中的信息融合,使传感器的 性能和精度得到了提高。
4、
采用曲面拟合法进行大型油浸式变压 器故障诊断中,能较好克服变压器故 障的误诊和漏诊,提高故障诊断水平 。
曲面拟合及其应用
主要内容
1、背景及应用
2、基本原理
3、在变压器短路故障在线监测中的应用
4、在大型油浸变压器故障诊断中的应用 5、总结及展望
1、背景及应用
在科学研究中,常常需要 根据实际实验测试数据分 析变量对目标函数的影响, 寻找目标函数与变量之间 的解析关系。
传统的插值法在使用时, 由于测量数据量大,导致 插值函数次数过高,计算 量大。同时,它无法识别 测试中的错误数据,容易 造成较大误差。
E [ Pk ( 0 1U 2U t 3U 2 4UU t 5U t2 )]2
拟合函数的原理和应用例题

拟合函数的原理和应用例题1. 原理介绍拟合函数是指通过已知的一组数据点,在给定的函数模型中,找到最接近这组数据点的曲线或曲面。
拟合函数的原理主要基于最小二乘法,即通过最小化观测值与拟合函数之间的差距来确定最佳拟合曲线。
最常见的拟合函数形式是多项式拟合,即通过一个高次多项式来逼近数据点。
其他常见的拟合函数形式包括指数函数、对数函数、幂函数等。
2. 应用例题下面将通过两个例题来说明拟合函数的应用。
2.1 例题一:拟合一组汽车销量数据假设我们得到了一组汽车销量数据,我们希望通过拟合函数来预测未来的销量。
首先,我们收集了过去5年的汽车销量数据,数据如下:年份销量(单位:万辆)2016 82017 92018 102019 112020 12我们可以使用多项式拟合来逼近这组数据点。
假设我们选择使用二次多项式拟合,即拟合函数的形式为:f(x)=ax2+bx+c我们要通过最小二乘法确定拟合函数的系数a、b、c。
计算最小二乘法的残差平方和(Residual Sum of Squares, RSS):$$ RSS = \\sum_{i=1}^{n} (f(x_i) - y_i)^2 $$其中n为数据点的个数,f(x i)为拟合函数计算出的值,y i为真实值。
通过求导数,我们可以得到方程组:$$ \\begin{align*} \\frac{\\partial RSS}{\\partial a} &= 0 \\\\ \\frac{\\partial RSS}{\\partial b} &= 0 \\\\ \\frac{\\partial RSS}{\\partial c} &= 0 \\\\\\end{align*} $$解这个方程组,就可以得到拟合函数的系数。
计算得到的拟合函数为:f(x)=0.5x2+0.5x+7.5接下来,我们可以使用这个拟合函数来预测未来几年的汽车销量。
2.2 例题二:拟合气温随时间变化的曲线假设我们有一组记录了一周内某个城市的每天的平均气温的数据,我们希望通过拟合函数来找到气温随时间变化的曲线。
最小二乘法拟合曲面

最小二乘法拟合曲面好嘞,今天我们聊聊一个有点“数学味”的话题——最小二乘法拟合曲面。
别紧张,虽然听起来像是要用大脑打怪,但其实它并没有那么复杂。
你可以把它想成是找一条最佳的“平衡线”,它帮助我们在一堆数据点中找到一个“最合适”的位置,就像你在百货商店里挑衣服,想要找到最合身、最舒服的一件。
假设你有一堆数据,这些数据可能有点乱七八糟,有高有低,不太规律,就像你在市场上看到的一堆蔬菜,有些西红柿红得发亮,有些却有点褐色,想找出一条合适的线,来把这些菜好好排列一下。
最小二乘法就是用来做这件事的,目的就是尽量让所有点都离拟合曲面“最近”。
怎么做到呢?就像是做个手术,把那些距离远的点“拉”回来,尽量让它们都处在一个比较“平滑”的状态下。
讲到这,你可能会想:那怎么知道“合适”呢?哈哈,别着急,最小二乘法有个“自我调节”的本领,就像老母鸡带小鸡一样,总能找到最合适的位置。
简单来说,它会去“最小化”那些“偏差”的平方。
啥意思呢?就是让每个数据点到拟合曲面(或者说“平衡线”)的距离尽可能小,越小越好。
你可以理解成,这个方法就是通过减少错误,来确保结果的准确性。
举个例子吧,假设你在一个大商场里走,眼前有一堆摊位,每个摊位上都有卖不同价格的商品。
你现在想挑一个摊位买东西,但你不能在每个摊位前都驻足,那样会浪费时间对吧?你干脆用一个小本子记下来,标记哪个摊位价格比较合适。
最小二乘法就像是这个本子,通过找到那些价格最符合你需求的摊位,最终帮你筛选出最合适的那几个。
说到这,可能有朋友会觉得,哎呀,这不就是个数学公式问题吗?确实,最小二乘法背后有个公式,原理看起来有点复杂,但其实也没那么恐怖。
你可以想象你拿着一根笔直的尺子,尝试把它摆放到数据点中间,目的是让它离所有点都尽量近,谁离得最远就把它“拉”回来。
尺子的位置就是最小二乘法为你找到的最佳拟合曲面。
好啦,别害怕。
这个过程其实并不是那么死板,操作起来也比较“人性化”。
就像你上大学时选择专业,总要做些权衡,有的选科成绩不错,但不喜欢;有的则刚好合适但成绩一般。
双曲线曲面拟合及在机械加工中的应用
双曲线曲面拟合及在机械加工中的应用在机械加工中,很多零部件需要进行表面的加工,以达到一定的精度和光洁度要求。
在表面加工的过程中,会用到各种各样的曲面拟合方法,而双曲线曲面拟合是其中的一种有效方法。
本文将着重介绍双曲线曲面拟合的原理及在机械加工中的应用。
一、双曲线曲面拟合的原理双曲线曲面是一种可以用双曲面方程表示的曲面,其数学表示形式为:1/x^2 + 1/y^2 = z^2/a^2其中,x和y是平面上的坐标,z是垂直于平面的坐标,a是常数。
这样的曲面具有很好的形状特点,例如双曲面切于自身轴线的所有平面都截得相同的彼此不相交的曲线,这些曲线被称为双曲线,因此称为双曲线曲面。
双曲线曲面拟合是指在有限点云数据上,利用双曲线曲面拟合算法,从点云数据中确定一条或多条双曲线曲面,使其最优化地逼近点云数据。
双曲线曲面的特点为双曲面方程的多项式阶级较低,计算复杂度较小,且能够准确地表现曲面的几何形状。
二、双曲线曲面拟合在机械加工中的应用在机械加工中,精度和表面光洁度是非常重要的,因此需要进行表面拟合。
双曲线曲面拟合因其计算简单、精度高而被广泛应用于机械加工领域中的模具、刀具、汽车零部件等领域。
例如,汽车工厂制造的车身模具等大型零部件往往具有曲面特征,必须使用双曲线曲面拟合算法对其进行表面拟合。
通过采集该模具的点云数据,在有限的数据范围内,使用双曲线曲面拟合算法为其确定一条或多条双曲线曲面,以取得最优化的表面数据描述。
然后,将计算出的曲面数据转化为机床语言,以进行加工。
另外,双曲线曲面拟合算法还在飞行器研究领域中具有广泛应用。
例如,在航空工业中,需要对机身表面的曲率进行拟合,以便确定飞机的空气动力学特性。
通过对机身进行三维扫描,获取点云数据,并使用双曲线曲面拟合算法,可以得到机身表面的精确曲率信息,从而有效地优化飞机的空气动力学性能。
总之,双曲线曲面拟合在机械加工中的应用领域广泛,具有较高的精度和可靠性,在加工行业中有着重要的地位。
matlab 曲面多项式拟合

Matlab曲面多项式拟合一、引言Matlab是一种非常强大的科学计算软件,广泛应用于工程、数学、统计学以及其他领域。
在工程和科学研究中,经常会遇到需要拟合数据的情况。
曲面多项式拟合是一种常见的拟合方法,可以用来近似描述数据所呈现的曲面形状。
本文将介绍在Matlab中如何进行曲面多项式拟合。
二、曲面多项式拟合的基本原理曲面多项式拟合是指利用多项式函数来逼近描述一个曲面的数据。
假设我们有一组实验数据,其中的每个数据点都包括两个自变量和一个因变量。
曲面多项式拟合的目标是找到一个多项式函数,使得该函数能够最好地拟合这些数据点,从而近似描述出数据所呈现的曲面形状。
一般来说,曲面多项式拟合的多项式阶数越高,拟合精度就越高,但也更容易受到数据噪声的影响。
三、在Matlab中进行曲面多项式拟合的步骤1. 准备数据在进行曲面多项式拟合之前,首先需要准备数据。
数据一般以矩阵的形式输入,其中每一行代表一个数据点,包括两个自变量和一个因变量。
在Matlab中,可以使用“meshgrid”函数生成自变量的网格数据,并利用这些网格数据计算因变量的数值,从而得到完整的数据集。
2. 进行拟合在准备好数据之后,可以使用Matlab中提供的“fit”函数进行拟合。
该函数可以指定需要拟合的自变量和因变量,以及拟合所采用的多项式阶数。
在拟合完成后,可以得到拟合的多项式函数以及拟合的曲面。
3. 可视化拟合结果拟合完成后,可以利用Matlab中的绘图函数将拟合的曲面可视化。
通过绘制原始数据点和拟合曲面,可以直观地观察拟合的效果,并进行进一步的分析和判断。
四、实例演示下面通过一个简单的实例演示在Matlab中进行曲面多项式拟合的步骤。
假设有如下的实验数据:X = [1, 2, 3, 4, 5];Y = [1, 2, 3, 4, 5];Z = [1, 4, 9, 16, 25];其中X和Y为自变量,Z为因变量。
我们希望利用这些数据进行曲面多项式拟合,并将拟合结果可视化。
matlab曲面拟合并求面积

一、引言在工程和科学领域中,曲面拟合是一项重要的数学和计算技术,它可以帮助研究人员或工程师从实验或观测数据中找到最佳的曲面模型,以便进行进一步的分析和应用。
在众多的曲面拟合方法中,MATLAB 作为一种强大的数学建模和计算软件,具有丰富的曲面拟合工具箱,能够进行曲面拟合并求出面积,本文将介绍如何使用MATLAB进行曲面拟合并求面积的操作方法。
二、MATLAB曲面拟合的基本原理MATLAB中的曲面拟合通常通过拟合曲面上的数据点来实现。
曲面拟合的基本原理是在给定数据点的情况下,找到一个曲面模型来最好地拟合这些数据点。
常用的曲面拟合方法包括最小二乘法、样条插值、高阶多项式拟合等。
在MATLAB中,通过调用曲面拟合工具箱中的相应函数,可以很容易地实现曲面拟合操作。
三、MATLAB曲面拟合并求面积的步骤1. 数据准备在进行曲面拟合之前,首先需要准备好要拟合的数据。
这些数据可以是实验测量得到的点,也可以是由其他方法计算得出的点。
在MATLAB中,可以将这些数据点表示为一组(x, y, z)的坐标,其中x和y表示数据点的空间位置,z表示对应这些位置的数值。
2. 曲面拟合在准备好数据后,可以使用MATLAB中曲面拟合工具箱中的函数来进行曲面拟合。
可以使用“fit”函数来拟合一个曲面模型,比如二次曲面、三次曲面或其他自定义的曲面模型。
拟合的结果可以用于后续的分析和计算。
3. 计算面积在获得曲面拟合模型之后,可以利用该模型来计算曲面的面积。
MATLAB提供了丰富的数学计算函数,可以方便地进行曲面积分和面积计算。
通过调用这些函数,可以得到拟合曲面的面积,该面积反映了原始数据点所描述的曲面的实际面积。
四、MATLAB曲面拟合并求面积的实例下面以一个简单的实例来演示如何使用MATLAB进行曲面拟合并求面积。
假设有一组数据点如下所示:```x = [1, 2, 3, 4, 5];y = [1, 2, 3, 4, 5];z = [1, 4, 9, 16, 25];```我们可以利用这些数据点来进行曲面拟合,假设我们使用二次曲面模型来拟合这些数据点:```MATLABp = polyfitn([x', y'], z, 2); % 二次曲面拟合[X, Y] = meshgrid(1:0.1:5, 1:0.1:5);Zfit = polyvaln(p, [X(:), Y(:)]);Zfit = reshape(Zfit, size(X));```通过上述代码,我们可以得到拟合曲面Zfit。
双曲面拟合的数学原理与应用
双曲面拟合的数学原理与应用随着科技的进步,越来越多的业务需要使用到数学知识。
在工程领域中,由于存在各种各样的测量数据,因此需要进行数据的拟合,以更好地描述系统、预测未来。
而双曲面拟合正是其中的一种重要的方法。
一、什么是双曲面拟合双曲面(Hyperboloid)是一种非球形、非柱面的三维曲面,其数学表达式为:x²/a² + y²/b² - z²/c² = 1其中,a、b、c 分别为双曲面的三个轴向参数。
双曲面拟合是指通过寻找一组最佳参数 a、b、c,使得该双曲面能够与一组离散数据点最为接近。
这种方法被广泛应用于工程测量、光学、钟表、航天等领域。
二、双曲面拟合的数学原理双曲面拟合的数学原理主要依赖于最小二乘法(Least Square Method)。
最小二乘法是一种数学处理方法,其目的是通过寻求一个可接受的函数来对一系列数据点进行拟合。
在双曲面拟合中,最小二乘法被用来求解双曲面方程的未知参数 a、b、c。
这可以通过以下步骤实现:1. 假设是否存在一个符合条件的双曲面,一般假设为该双曲面与数据点的残差(即理论值与实际值之间的差)平方和最小。
2. 通过最小二乘法计算出残差平方和最小的三个轴向参数 a、b、c。
3. 将计算出的参数带入双曲面方程中,得到最终的双曲面拟合方程。
三、双曲面拟合的应用双曲面拟合的应用是非常广泛的,以下是其中的几个例子:1. 工程测量:斜面拟合、曲面拟合、磨损拟合等应用。
2. 光学:望远镜及显微镜物镜参数拟合、光滑曲面拟合等应用。
3. 钟表:钟表机芯摆调校、钟表壳体外形拟合等应用。
4. 航天:导弹鱼雷、卫星天线、火箭发动机喷口等应用。
通过以上例子,我们可以看到双曲面拟合在实际生产中的准确性和实用性。
但需要注意的是,双曲面拟合并非万能的方法,对于某些情况下,其他方法可能更为适合。
四、需要注意的事项1. 数据点的数量越多,其拟合效果越好。
bezier 曲线的曲面拟合
bezier 曲线的曲面拟合一、Bezier曲线Bezier曲线是一种基本的几何曲线,它是由法国的科学家法国人Pierre Bezier于1962年提出的,在计算机图形学中应用广泛,在大多数绘图软件中都有它的实现。
实际上,Bezier曲线是一种由控制点和贝塞尔曲线段组成的平滑曲线,这些贝塞尔曲线段可以连接构成一条实现的曲线段。
Bezier曲线的定义如下:用n+1个控制点P0,P1,...Pn确定唯一的n阶Bezier曲线,该曲线由n个(n>=2)Bezier曲线段组成,它的路径方程为:B(t) = sum(Pi* Bn,i(t) (i=0,1,...n)其中Bn,i (t)为贝塞尔基函数:Bn,i (t)= C(n,i)*t^i*(1-t)^(n-i) (i=0,1...n) 其中C(n,i) 为组合数:C(n,i) = n!/(i!*(n-i)!)Bezier曲线具有一定的优势:(1)Bezier曲线的计算量不多,而且计算量固定,从它的定义式可以看出,Bezier曲线的计算量只和控制点的数量有关,和区间长度无关;(2)Bezier曲线的计算公式是一种确定的公式,易于推导,即使在变换空间中也能简单的求解;(3)Bezier曲线的优点在于曲线的表示力强,它不仅能准确描述曲线上的每一点,而且能模拟出椭圆、圆弧、抛物线、双曲线等复杂的曲线。
二、Bezier曲面Bezier曲面是基于Bezier曲线构建的一种曲面,与Bezier曲线相比,Bezier曲面有更大的表示能力,能代表更复杂的曲面,该方法在计算机图形学中应用广泛,特别是在汽车设计、航空航天、产品建模、工业设计、船舶设计等行业非常流行。
根据贝塞尔三角形的定义,Bezier曲面的曲面表达形式为:B(u,v)=sum(Pi,j * Bm,i(u) * Bn,j(v) (i=0,1,...,m; j = 0,1,...n))其中Bm,i (u)和Bn,j (v)分别为贝塞尔基函数:Bm,i (u) = C(m,i) * u^i * (1-u)^(m-i) (i=0,1,...,m)Bn,j (v) = C(n,j) * v^j * (1-v)^(n-j) (j=0,1,...n) 其中C(m,i)和C(n,j)分别为组合数,m和n分别表示控制点的维度。
曲面拟合的方法(一)

曲面拟合的方法(一)曲面拟合简介曲面拟合是一种常见的数据处理技术,用于将散点数据拟合成一个平滑的曲面。
在计算机图形学、地理信息系统、工程设计等领域都有广泛的应用。
本文将介绍几种常用的曲面拟合方法。
多项式拟合多项式拟合是最简单直接的方法之一。
它通过使用多项式函数来逼近原始数据。
常见的多项式拟合方法有最小二乘多项式拟合和使用插值多项式的方法。
最小二乘多项式拟合最小二乘多项式拟合是基于最小二乘法的思想,将原始数据拟合成一个多项式函数。
通过最小化误差的平方和来确定多项式的系数。
该方法简单易懂,但可能会导致过度拟合。
插值多项式拟合插值多项式拟合是将原始数据点直接连接成一条曲线的方法。
它使用拉格朗日插值或牛顿插值来计算拟合曲线上的其他点。
这种方法适用于数据点较少的情况,但在数据点密集的情况下可能会产生振荡。
B样条曲线B样条曲线是一种常用的曲线拟合方法。
它通过在局部范围内使用多个低阶多项式来逼近原始数据。
B样条曲线的特点是平滑,且可以控制曲线的形状。
三次B样条曲线三次B样条曲线是一种常用的B样条曲线方法。
它使用三次多项式来逼近原始数据。
三次B样条曲线具有良好的平滑性和合理的计算复杂度,被广泛应用于曲面拟合、曲线绘制等领域。
最小二乘曲面拟合除了拟合曲线,还有一种方法可以拟合曲面。
最小二乘曲面拟合是通过最小化误差的平方和来确定曲面的系数。
常见的方法有多项式曲面拟合和克里金插值法。
多项式曲面拟合多项式曲面拟合是将原始数据点拟合成一个多项式函数的表面。
通过最小二乘法确定多项式的系数,从而拟合出一个平滑的曲面。
这种方法简单易懂,但可能会导致过度拟合。
克里金插值法克里金插值法是一种基于统计学的方法,用于对散点数据进行空间插值。
它基于数据的空间相关性来估计拟合曲面上任意点的值。
克里金插值法适用于数据点较多且分布均匀的情况,但在数据点密集的情况下可能会产生振荡。
总结曲面拟合是一种常见的数据处理技术,可以将散点数据拟合成一个平滑的曲面。
曲面拟合
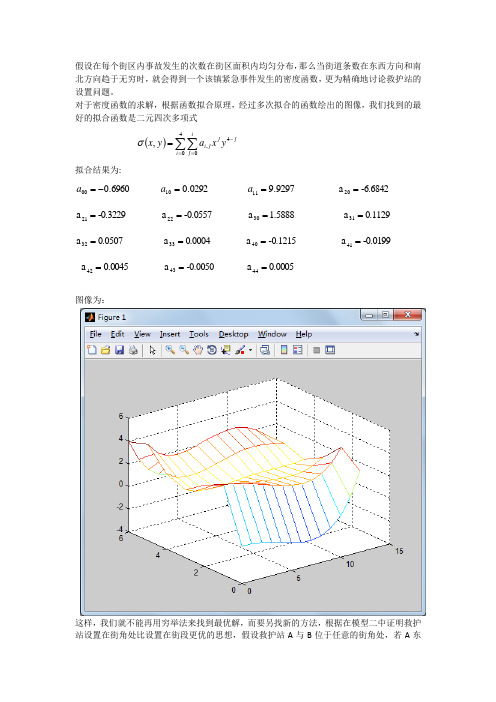
假设在每个街区内事故发生的次数在街区面积内均匀分布,那么当街道条数在东西方向和南北方向趋于无穷时,就会得到一个该镇紧急事件发生的密度函数,更为精确地讨论救护站的设置问题。
对于密度函数的求解,根据函数拟合原理,经过多次拟合的函数绘出的图像,我们找到的最好的拟合函数是二元四次多项式 ()jj i ij ji yx ay x -==∑∑=4400,,σ拟合结果为:6960.000-=a 0292.010=a 9297.911=a -6.6842a 20= -0.3229a 21= -0.0557a 22= 1.5888a 30= 0.1129 a 31= 0.0507 a 32= 0.0004a 33= -0.1215a 40= -0.0199a 41= 0.0045a 42= -0.0050a 43= 0.0005a 44=图像为:这样,我们就不能再用穷举法来找到最优解,而要另找新的方法,根据在模型二中证明救护站设置在街角处比设置在街段更优的思想,假设救护站A 与B 位于任意的街角处,若A东边紧急事件发生次数多于西边(在A 的负责范围内),则A 向东移动。
同样的讨论适用于南北方向。
当救护站两边发生的紧急事件次数相等时,救护站即处在最优位置。
问题转化为:已知一块质量分布不均匀的矩形木板的密度分布函数,求两个支撑点,使得只要木板在支撑点处受力即可保持平衡。
基本思想:任意选两个起始点,根据密度函数可以确定一条分界线,使在线两边的质量相等,然后再把每半边所在区域分成四个象限,若四个象限的质量满足条件:32414321A A A A A A A A +=++=+32414321B B B B B B B B +=++=+可推出:4231A A A A ==4132B B B B ==解方程可得A 与B 的最优位置。
而每个象限的质量可以通过 ),(y x σ乘以距离(y Y x X D -+-=1520,其中Y X ,为A 或B )在该象限积分⎰⎰dxdy D σ得到,但由于拟合得到的的四次函数很复杂,分界线可能不是直线,使难度大大增大,。
曲面拟合原理与实例
多项式函数对所给的坐标进行拟合:构造关于系数 a ij 的多元函数:点( a 11 ,⋯, a pq )是多元函数 s(a 11,L , a pq )的极小点,其中 g 为权函数,默 认为 1,所以点( a 11 ,⋯, a pq )必须满足方程组saij在 g 1的情况下,有f (x, y) i 1 j a ij x yij1,11 aii1j1i 1 j 1 j x yf (x, y)a11a 12y 2 a 13yL q1a 1q ya 21x a 22xy2a 23xyLq1 a 2qxyMi1i1i 1 2Li 1 q 1a i1x i 1a i2x i 1ya i 3x i 1y 2a iq x i 1yq 1Mp1p1 p 1 2Lp 1 qa p1x a p2 x y a p 3x ya pq x yp,qpq即1给定一组坐标 (x g ,y g ,z g ) ,g 1,2,⋯,n , 表示有n 个点。
要求用以下二元 x2xx Mxp,y y2yMyq,Aa12L a1qa 22L a2q M O M a p2 L apq则函数又可表示为 f (x , y) x TAy ,拟合的目标就是求出系数矩阵 A 。
n 2s( a 11 ,L ,a pq ) g [ f (x g , y g )z g ]g1ng1pqi 1 j 1g (a ij x yi 1 j 1z g )2a11a21 M ap12[ f ( x g , y g) z g ] g1aija ij2[ f (x g , y g ) g1nz g ] aij [ f(x g ,y g )]2[f (x g ,y g ) i 1 j 1z g ]x g ygg1n2 g1因此可得 x ig 1y g j 1f(x g ,y g ) x g i 1y g j 1z gg1g1npq ni x g i1y g j11a x g y g1i 1 j x 1z gg111 g1 np,qni x g i1y g j1 1 1a x y i 1 j 1 x yzgg11,1g1p,qnna1 1 i 1 j ( x g y g x g y g1i 1 )x gy g j 1z g1,1g1g1u (i, j ) n(xg g11y g 1 i 1 xg y gj 1) ,v(i, j) ni 1 j 1 x g y g z g g1p,qa u (i, j) v(i, j) (i, j) (1,1),⋯,(p,q)上式实际共有 p q 个等式,可将这u 11(1,1) L u pq (1,1) a 11 M O MM u 11(p,q) L u pq ( p, q) a pq也就是 U*a=V 的形式,其中u 11 L u pq (1,1)U M O M ,u 11( p, q)L u pq ( p,q) p q 个等式写成矩阵的形式有: v(1,1)Mv( p,q)a 11 v(1,1) a M , V Ma pq v( p, q) nni 1 j 1 i 1 j 1 x g i 1y g j 1f(x g ,y g )U 为pq pq 阶矩阵,实现函数为function A=leftmatrix(x,p,y,q);V 为长pq 的列向量,实现函数为function B=rightmatrix(x,p,y,q,z)。
曲面拟合实例教程总结
例7.2.1试用最小二乘法求拟合曲线,并估计其误差,做出拟合曲线。
(1)做散点图x=[-2.5,-1.7,-1.1,-0.8,0,0.1,1.5,2.7,3.6];y=[-192.9,-85.50,-36.15,-26.52,-9.10,-8.43,-13.12,6.50,68.04];plot(x,y,'r*')legend('实验数据(xi,yi)')xlabel('x'),ylabel('y')title('例7.2.1的数据点(xi,yi)的散点图')2.CFTOOL工具箱使用Shift+enter:换行输入Gaussian:高斯曲线Interpolant:最小二乘法差值Polynomial:多项式3.y1=polyfit(x,y,3) 拟合多项式的阶数为34.matlab绘制三维曲面图已知曲线关系方程以二元函数图z = xexp(-x^2-y^2) 为例讲解基本操作,(1)首先需要利用meshgrid函数生成X-Y平面的网格数据,如下所示:% 生成二维网格数据xa = [-2,0.2,2];ya =[-1,0.15,1.5];[x,y] = meshgrid(xa,ya);(2)此外,需要计算纵轴数据(z轴),如下所示:% calculate z dataz = x.*exp(-x.^2 - y.^2);(3)在计算出(x,y,z)数据后,就可以使用三维绘图函数mesh绘制三维曲面图,如下所示:mesh(x,y,z);4(2)、另一种方法:[x,y] = meshgrid(-2:0.2:2,-1:0.15:1.5);z = x.*exp(-x.^2 - y.^2);mesh(x,y,z);5.由三组散点图绘制曲面(网格划分)xyz=[40 2 1.440 5 2.540 7 1.440 9 0.970 8 5.6 ];tri = delaunay(xyz(:,1), xyz(:,2));trimesh(tri, xyz(:,1), xyz(:,2),xyz(:,3)); shading interp如何使用matlab 2014a 做数据曲线拟合(cftool)1. 输入数据做数据曲线拟合,当然该有数据,本经验从以如下数据作为案例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
问题:给定一组坐标(,,)g g g x y z ,1,2,g =…,n ,表示有n 个点。
要求用以下二元多项式函数对所给的坐标进行拟合:,11111,111(,)p qp qi j i j ijij ij i j f x y a xya x y ----=====∑∑∑即211112131212122232111211123111211123(,)q q q q i i i i q i i i iq p p p p q p p p pq a a y a y a y f x y a x a xy a xy a xy a x a x ya x y a x y a x a x y a x y a x y ------------++++=+++++++++++++++L L M L M L设1112121222221211,,q q p p pq p q a a a x y a a a x y a a a x y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦x y A L LM M O M M M L则函数又可表示为(,)T f =x y x Ay ,拟合的目标就是求出系数矩阵A 。
最小二乘法:构造关于系数ij a 的多元函数:2112111111(,,)[(,)]()pqnni j pq g g g g g ij g g g i j s a a f x y z a x y z ωω--=====-=-∑∑∑∑L点(11a ,…,pq a )是多元函数11(,,)pq s a a L 的极小点,其中g ω为权函数,默认为1,所以点(11a ,…,pq a )必须满足方程组0ijsa ∂=∂ 在1g ω=的情况下,有{}21111111111[(,)]2[(,)][(,)]2[(,)]2(,)nggg g ij ijng g g g g g ij ni j g g g g g g n i j i j g gg g g g g g s f x yz a a f x y z f x y a f x y z x y x y f x y x y z ==--=----=∂∂=-∂∂⎧⎫∂⎪⎪=-⎨⎬∂⎪⎪⎩⎭=-⎡⎤=-⎣⎦∑∑∑∑因此可得111111(,)nni j i j ggg g g g g g g xyf x y x y z ----===∑∑1111111111p qnni j i j ggggg g g g g xya x y x y z αβαβαβ------=====∑∑∑∑ ,11111111,11p qnni j i j ggg gg g g g g xya x y x y z αβαβαβ------====∑∑∑ ,1111111,111()p qn n i j i j g g g g g g g g g a x y x y x y z αβαβαβ------===⎡⎤=⎢⎥⎣⎦∑∑∑ 令11111(,)()ni j g g g gg u i j x y x yαβαβ----==∑,111(,)ni j gg g g v i j x y z --==∑ 则,1,1(,)(,)p qa u i j v i j αβαβαβ==∑(,)(11),(,)i j p q =,…, 上式实际共有p q ⨯个等式,可将这p q ⨯个等式写成矩阵的形式有:111111(1,1)(1,1)(1,1)(,)(,)(,)pq pq pq u u a v u p q u p q a v p q ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦L M O M M M L 也就是U*a=V 的形式,其中1111(1,1)(1,1)(,)(,)pq pq u u u p q u p q ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦U L M OM L ,11pq a a ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦a M ,(1,1)(,)v v p q ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦V MU 为pq pq ⨯阶矩阵,实现函数为function A=leftmatrix(x,p,y,q);V 为长pq 的列向量,实现函数为function B=rightmatrix(x,p,y,q,z)。
这样就可以算出列矩阵a ,然后转化成A 。
例子:某地区有一煤矿,为估计其储量以便于开采,先在该地区进行勘探。
假设该地区是一长方形区域,长为4公里,宽为5公里。
经勘探得到如下数据:请你估计出此地区内(51,42≤≤≤≤y x )煤的储量,单位用立方米表示,并用电脑画出该煤矿的三维图象。
如果直接画出三维曲面图形:clear;x=1:4;y=1:5;[X,Y]=meshgrid(x,y) Z=[13.72 25.80 8.47 25.27 22.32; 15.47 21.33 14.49 24.83 26.19; 23.28 26.48 29.14 12.04 14.58; 19.95 23.73 15.35 18.01 16.29]' surf(X,Y,Z);X =1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 Y =1 1 1 12 2 2 23 3 3 34 4 4 45 5 5 5 Z =13.7200 15.4700 23.2800 19.950025.8000 21.3300 26.4800 23.73008.4700 14.4900 29.1400 15.350025.2700 24.8300 12.0400 18.010022.3200 26.1900 14.5800 16.2900粗略计算体积:底面积乘以平均高度。
p=sum(Z);q=p(:,[2,3,4]);h=sum(q')/15v=2000*4000*hh =20.0773v =1.6062e+008进行线性插值:xi=linspace(1,4,31);yi=linspace(1,5,41);[XI,YI]=meshgrid(xi,yi); ZI=interp2(X,Y,Z,XI,YI,'linear');surf(XI,YI,ZI);进行三次多项式插值:xi=linspace(1,4,31);yi=linspace(1,5,41);[XI,YI]=meshgrid(xi,yi); ZI=interp2(X,Y,Z,XI,YI,'cubic');surf(XI,YI,ZI);进行插值后计算体积:底面积乘以平均高度。
xi=linspace(1,4,61);yi=linspace(1,5,81);[XI,YI]=meshgrid(xi,yi); ZI=interp2(X,Y,Z,XI,YI,'cubic');surf(XI,YI,ZI);H=0;n=0;for j=21:61for i=1:81H=H+ZI(i,j);n=n+1;endendnH=H/nS=2000*4000;V=S*Hn =3321H =20.8222V =1.6658e+008上面是插值的方法解题,下面用拟合的方法解题。
为此编写了几个M函数:leftmatrix.mfunction U=leftmatrix(x,p,y,q)% U*a=V a为系数列矩阵,长度为p*q% U为左边p*q乘p*q矩阵% x,y 为长度一致的列矩阵,给定点的坐标% p,q 为拟合的函数中x,y的幂的最高次数m=length(x);if (nargin~=4) & (m~=length(y))error('error check check!');endU_length=p*q; % U 为p*q阶方阵U=zeros(U_length,U_length); % 赋值0,目的是分配内存for i=1 : p*qfor j= 1 : p*qx_z=quotient(j-1,q)+quotient(i-1,q); % x 的幂的次数,quotient为求商 y_z=mod(j-1,q)+mod(i-1,q); % y 的幂的次数U(i,j)=qiuhe(x,x_z,y,y_z);endendrightmatrix.mfunction V=rightmatrix(x,p,y,q,z)% U*a=V% V 为一个列向量长为p*q% x y z 为点的坐标%p q 分别为x y幂的最高次数if nargin~=5error('error check check! rightmatrix')endV=zeros(p*q,1);for i=1 : p*qx_z=quotient(i-1,q);y_z=mod(i-1,q);V(i,1)=qiuhe(x,x_z,y,y_z,z);endquuotient.mfunction sh=quotient(x,y)% sh 为 x/y 的商sh=(x-mod(x,y))/y;qiuhe.mfunction he=qiuhe(x,p,y,q,z)% he x^p*y^q 从1->m的和% x,y 向量长度相同% p,q分别为x,y的幂的次数m=length(x);if (nargin<4 )&(m~=length(y)) %输入量至少为四,x,y行向量长度必需一样error('error check check!');endif nargin==4 %没有 z , 默认为元素全部为1的向量z=ones(m,1);endhe=0;for i=1:mhe=he+x(i)^p * y(i)^q*z(i); % 1-->m 求和end下面一段程序先进行拟合,然后验证拟合的效果,具体操作:先输入x=…y=…z=…p=…q= (注意x,y,z是向量);拟合得到系数a,也就是得到了拟合的函数;根据拟合函数计算给定点(xx, yy)的函数值zz=f(xx, yy)并进行画图检验。
程序保存于M文件fit.m。
fit.mclear;[X,Y]=meshgrid(1:4,1:5);Z=[13.72 25.80 8.47 25.27 22.32;15.47 21.33 14.49 24.83 26.19;23.28 26.48 29.14 12.04 14.58;19.95 23.73 15.35 18.01 16.29]';x=reshape(X,20,1);y=reshape(Y,20,1);z=reshape(Z,20,1);p=4;q=5;U=leftmatrix(x,p,y,q); % U*a_n=VV=rightmatrix(x,p,y,q,z);%a_n=inv(U)*V;a_n=U\V;for i=1 : length(a_n) % 把长为p*q 的列向量a_n转换成p*q的矩阵aa ii=quotient(i-1,q)+1; % quotient求商jj=mod(i-1,q)+1;aa(ii,jj)=a_n(i,1);endaam=31;n=41;%m=4;n=5;[XI,YI]=meshgrid(linspace(1,4,m),linspace(1,5,n));xx=reshape(XI,m*n,1);yy=reshape(YI,m*n,1);zz=zeros(m*n,1);xy=zeros(m*n,1);xt=zeros(m*n,1);yt=zeros(m*n,1);%zz=0; % zz 是 xx,yy 代入所拟合的函数求出的函数值for i=1 : p % 函数为Σaa(i,j)*x^i*y^j,(i=1...p,j=1...q) for j=1 : q % aa 为pxq的系数的矩阵xt=xx.^(i-1);yt=yy.^(j-1);xy=xt.*yt;zz=zz+aa(i,j).*xy;endendZI=reshape(zz,n,m);surf(XI,YI,ZI); %axis([1 4 1 5 0 30])aa =1.0e+003 *0.1465 -0.2678 0.2132 -0.0624 0.0058-0.7287 1.3972 -0.9275 0.2412 -0.02100.4416 -0.8415 0.5487 -0.1407 0.0122-0.0680 0.1295 -0.0839 0.0214 -0.0018注意:权函数在拟合的函数非常重要,不过她只能按你遇到的具体问题来取,我这里为1;当p,q越大时,拟合的函数与原数据的方差越小,但是有可能函数本身抖动非常厉害,可以画图看出来。