一种机载稳定平台伺服控制系统的设计与实现_赵冠军
机载SAR天线稳定平台伺服控制系统的算法设计改进
I . rd a n e i , h h e cdm c ne, e n 0 10 C i , 2 Ga ut U i r t Te i s A a e y fSi c B l g 1 9 ,hn e v sy C ne o e s t i 0 a
A s a t T eA t n tble lt r f i b reS R ( ytei A etr R dr a o p naetea — b t c : h ne aSa izdPa om o Ar on A r n i f — Snh s p r e a a)cncm est h n s u
中图分 类号 : N 2 . T 8 86
文献标 识码 : A
文 章编 号 :0 5— 4 0 2 1 ) 3— 3 7—0 10 99 (00 0 0 2 5
机载 合 成 孔 径 雷 达 ( i on ytei A etr Ar reSnh t p r e b c u
An e n t b lz d Pl to m f Ai . r e S t n a S a i e a f r o r Bo n AR i
Q U Df , H NG P I ee i Z A
,L n U Mi
, .ntueo l t nc,TeC ie cdmyo i cs B ln 0 10 C i 、 1 Istt fEe r i i c o s h hns A ae S e e, e g10 9 , hn I e f cn i t a
go n r u d.W e d sg he s r o c n r lig s se o he p afr o i g e FP e i n t e v o to l y t m ft lto m n sn l GA h p,t mplme ts mp i g,p o n ci o i e n a ln r- c s i g o he fl ra o to lo ih e sn ft t nd c n rla g rt ms,a d P M p e e ultn fDC o q e moo s T sp p ri to u e i e n W s e d rg aigo tr u t r. hi a e n r d c s d u l ae l o e v o r l i i g wa e e hr s l v l e fl r ix d g i o b e r t —o p s r o c nto ,lf n v lt t e hod—a u t ,f e — a n t i e to. T s mp o e n sha e v r to g a p ia in v l e r 1 he e i r v me t v ey sr n p lc to au . Ke r y wo ds:An e na S a i z d P af r ;wa e e h e hod v l e fle ;fx d— an tn t bl e lto m i v l tt r s l — au tr i e g i i
一种舰载伺服稳定平台的结构设计
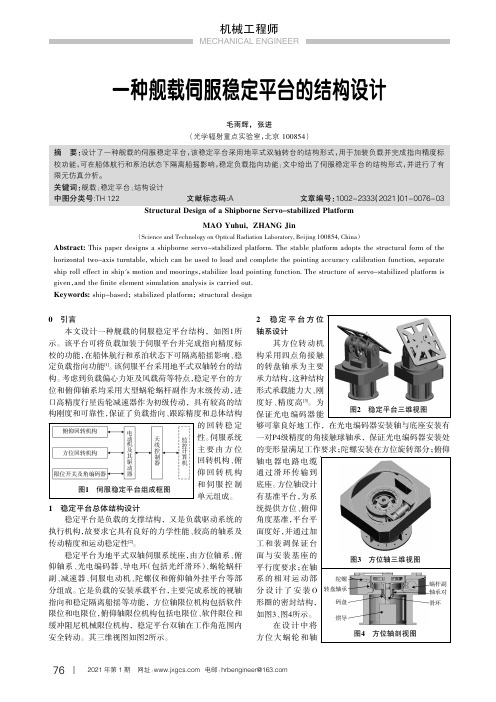
2021年第1期网址: 电邮:*******************一种舰载伺服稳定平台的结构设计毛雨辉,张进(光学辐射重点实验室,北京100854)图3方位轴三维视图陀螺转盘轴承码盘惯导蜗杆副轴承对滑环图4方位轴剖视图引言本文设计一种舰载的伺服稳定平台结构,如图1所示。
该平台可将负载加装于伺服平台并完成指向精度标校的功能,在船体航行和系泊状态下可隔离船摇影响、稳定负载指向功能[1]。
该伺服平台采用地平式双轴转台的结构。
考虑到负载偏心力矩及风载荷等特点,稳定平台的方位和俯仰轴系均采用大型蜗轮蜗杆副作为末级传动,进口高精度行星齿轮减速器作为初级传动,具有较高的结构刚度和可靠性,保证了负载指向、跟踪精度和总体结构的回转稳定性。
伺服系统主要由方位回转机构、俯仰回转机构和伺服控制单元组成。
1稳定平台总体结构设计稳定平台是负载的支撑结构,又是负载驱动系统的执行机构,故要求它具有良好的力学性能、较高的轴系及传动精度和运动稳定性[2]。
稳定平台为地平式双轴伺服系统座,由方位轴系、俯仰轴系、光电编码器、导电环(包括光纤滑环)、蜗轮蜗杆副、减速器、伺服电动机、陀螺仪和俯仰轴外挂平台等部分组成。
它是负载的安装承载平台,主要完成系统的视轴指向和稳定隔离船摇等功能,方位轴限位机构包括软件限位和电限位,俯仰轴限位机构包括电限位、软件限位和缓冲阻尼机械限位机构,稳定平台双轴在工作角范围内安全转动。
其三维视图如图2所示。
2稳定平台方位轴系设计其方位转动机构采用四点角接触的转盘轴承为主要承力结构,这种结构形式承载能力大、刚度好、精度高[3]。
为保证光电编码器能够可靠良好地工作,在光电编码器安装轴与底座安装有一对P4级精度的角接触球轴承,保证光电编码器安装处的变形量满足工作要求;陀螺安装在方位旋转部分;俯仰轴电器电路电缆通过滑环传输到底座。
方位轴设计有基准平台,为系统提供方位、俯仰角度基准,平台平面度好,并通过加工和装调保证台面与安装基座的平行度要求;在轴系的相对运动部分设计了安装O 如图3、图4所示。
基于TMS320F28335的数字伺服舰载稳定平台
www�ele169�com | 47信息工程硬件电路结构以及软件控制算法设计。
1 稳定平台系统组成■1.1 分轴稳定简介设计采用分轴稳定[8]。
所谓分轴稳定是对载体的摇摆分解为横摇和纵摇两个正交轴上的独立运动,再对横摇、纵摇两轴分别进行稳定。
用载体两轴相对水平面的误差信号控制交流伺服系统向稳定平台施加反方向转矩,从而使载体摇摆过程中,平台基准面始终相对海平面保持水平,如图1所主支柱减速器横摇机构纵摇机构伺服电机yα■1.2 系统硬件本稳定平台硬件主要由接口电路、数据处理、执行机构、姿态反馈机构等组成,如图2所示。
接口电路由CPLD 和电平转换芯片等组成,主要完成对舰船罗经提供的载体姿态以及平台自身相对于载体坐标系的姿态进行采集、中转、解码和预处理等。
除此之外接口电路还负责将姿态信息上传便于观察数据。
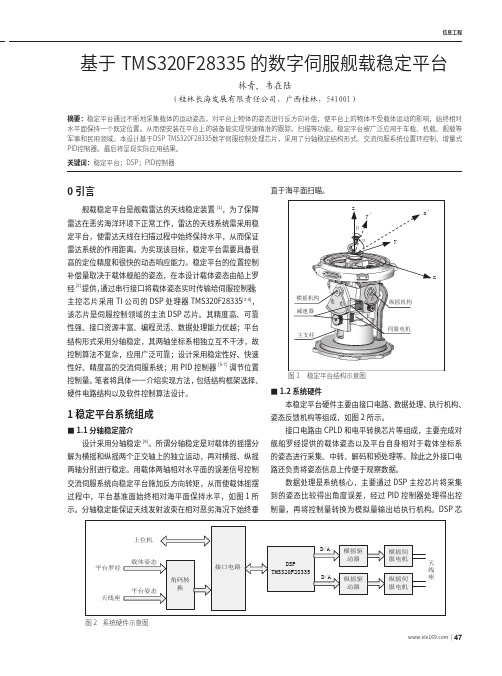
数据处理是系统核心,主要通过DSP 主控芯片将采集到的姿态比较得出角度误差,经过PID 控制器处理得出控芯林青,韦在陆(桂林长海发展有限责任公司,广西桂林,541001)摘要:稳定平台通过不断地采集载体的运动姿态,对平台上物体的姿态进行反方向补偿,使平台上的物体不受载体运动的影响,始终相对水平面保持一个既定位置。
从而使安装在平台上的装备能实现快速精准的跟踪、扫描等功能。
稳定平台被广泛应用于车载、机载、舰载等军事和民用领域。
本设计基于DSP TMS320F28335数字伺服控制处理芯片,采用了分轴稳定结构形式、交流伺服系统位置环控制、增量式PID控制器。
最后将呈现实际应用结果。
关键词:稳定平台;DSP;PID控制器48 | 电子制作 2020年12月PID 控制器基本的思想就是将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,用该控制量对被控对象进行控制。
其中比例环节成比例地反应控制系统的偏差信号,保证系统的快速性;积分环节主要用于消除静态误差,提高系统的置位精度;微分环节能反映偏差信号的变化趋势,并在偏差信号变得过大或过小之前,在系统中提前引入一个修正信号,从而加快系统的动作速度,缩短调节时间。
基于嵌入式的伺服综合测控平台的设计
计算机测量与控制.2017.25(7) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·51 ·收稿日期:20170118; 修回日期:20170221。
作者简介:段志国(1992),男,江苏句容人,硕士研究生,主要从事嵌入式伺服系统方向的研究。
李 军(1970),男,博士,教授,主要从事伺服系统及其相关测控技术方向的研究。
文章编号:16714598(2017)07005104 DOI:10.16526/j.cnki.11-4762/tp.2017.07.013 中图分类号:TP206.1文献标识码:A基于嵌入式的伺服综合测控平台的设计段志国1,赵 岩2,李 军1,周剑波1(1.南京理工大学自动化学院,南京 210094;2.人民解放军92941部队94分队,辽宁葫芦岛 125001)摘要:基于嵌入式技术,设计了一套集控制、测试和分析于一体的伺服综合测控平台;该平台采用集散式结构,在硬件上提供了多种通信与测控接口,软件上以Linux嵌入式操作系统和Windows系统为基础,提供了友好的人机交互界面;可以根据现场状况工作在便携的单机模式或者功能完备的联机模式;平台同时为网络型伺服系统预留了网络接口,有很好的通用性和可扩展性等优点;经测试,该平台操作便捷,运行稳定,可用于多种类伺服系统的测控分析。
关键词:嵌入式;伺服测控系统;集散式结构;通用性犇犲狊犻犵狀狅犳犐狀狋犲犵狉犪狋犲犱犜犲狊狋犻狀犵犪狀犱犆狅狀狋狉狅犾犘犾犪狋犳狅狉犿犳狅狉犛犲狉狏狅犛狔狊狋犲犿犅犪狊犲犱狅狀犈犿犫犲犱犱犲犱犜犲犮犺狀狅犾狅犵狔DuanZhiguo1,ZhaoYan2,LiJun1,ZhouJianbo1(1.SchoolofAutomation,NanjingUniversityofScienceandTechnology,Nanjing 210094,China;2.Unit92941ofPLA,Huludao 125001,China)犃犫狊狋狉犪犮狋:Basedontheembeddedtechnology,asetofintegratedtestingandcontrolplatformwhichincludesthefunctionsofcontrol,testandanalysisisdesignedforservosystem.Theplatformisdesignedwiththedistributedstructure.Intermsofhardware,itprovidesmultiplecommunicationandtestingports.Intermsofsoftware,itbasedontheLinuxembeddedoperatingsystemandWindowssystem,providingfriend lyhuman-computerinteractioninterface.Theplatformcanworkinthestand-alonemodewhichisportableorworkinthecombinedmodewhichhasthecompletefunctionsaccordingtothedifferentenvironment.Theplatformalsoprovidesthenetworkinterfaceforthenetworkservosystem.So,theplatformhastheadvantagesofgoodversatilityandexpansibility.Accordingtothetest,theplatformcanbeoperatedconven ientlyandrunningstably,anditcanbeusedfortheanalysisandcontrolofmanykindsofservosystems.犓犲狔狑狅狉犱狊:embedded;servosystem;distributedstructure;versatility0 引言伺服技术即高精度的跟踪与定位技术,随着伺服技术的不断发展和现代化生产规模的不断扩大,各行业对伺服系统的需求日益增大,并对其性能提出了更高的要求。
单轴稳定平台伺服控制器设计与实现
・
4 2・
《 测控技术)o 2 2 1 年第 3 卷第 7 l 期
单轴 稳定平 台伺服控制器设计与实现
尹 航 ,齐 蓉, 柯栋梁
702 ) 1 19 ( 西北工业大学 自动化学院 , 陕西 西安
摘要 : 为快速隔离载体扰动, 准确跟踪 目 , 标 保证平台相对惯性参考 系稳定 , 设计 了以 I U i ram a— M ( e i es n tl ue n nt 、 rmet i 编码 器和 电流 传感 器的输 出值 作 为反馈 , 成 了电流环 、 u ) 形 速度 环 和 位 置 环 的 三 闭环 单 轴
S a iz d P af r t b l e l to m i
Y N H n , iR n , E D n -a g I a g Q o g K o gl n i
( c o l f uo a o , ot et n P l e h i l nv r t, ia 1 1 9 C ia S h o o A tm t n N r w s r o t nc i s y X ’ n7 0 2 , h ) i h e yc aU ei n
关 键词 : S ; 定平 台 ; D P稳 伺服 控制 器 ; 矢量控 制
中图分 类号 :M3 1 2 T 0 .
文 献标识 码 : A
文章编 号 :0 0—8 2 ( 0 2 0 0 4 0 10 8 9 2 1 ) 7— 0 2— 4
基于DSP的舰载搜索雷达稳定平台交流伺服系统的设计

基于DSP的舰载搜索雷达稳定平台交流伺服系统的设计赵金锴;笪林荣
【期刊名称】《舰船电子对抗》
【年(卷),期】2006(29)4
【摘要】给出了一种基于DSP的舰载搜索雷达交流伺服控制系统的设计方法.采用高速数字信号处理芯片TMS320LF2407A作控制主体,交流变频器和交流无刷电机作驱动,采用先进的数字PID控制算法,组成全数字交流伺服系统,保证系统具有很高的精度、可靠的稳定性和良好的可扩展性.仿真试验表明该设计满足舰载雷达伺服控制系统的要求.
【总页数】5页(P50-53,79)
【作者】赵金锴;笪林荣
【作者单位】西安电子科技大学,西安,710071;船舶重工集团公司723所,扬
州,225001
【正文语种】中文
【中图分类】TN959.1+1;TM383.4+2
【相关文献】
1.基于DSP的舰载天线稳定平台伺服系统的设计与实现 [J], 喻冬梅
2.舰载搜索雷达稳定平台控制系统设计 [J], 程小平
3.基于数字平台罗经的舰载雷达大惯量伺服系统设计 [J], 李涛
4.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨;张兢晶
5.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨[1];张兢晶[1]
因版权原因,仅展示原文概要,查看原文内容请购买。
一种机载稳定平台伺服控制系统的设计与实现
起 的几何 约 束 耦 合 干 扰 力 矩 只有 通 过平 台 减 震 器 和 四框 架 的结构 得 到衰 减 , 他 包 括 由平 台实 际挂 其
飞状 态时平 台气 动外 形 不 佳 引 起 的 风 阻力 矩 、 座 基
控 制信 号经 过 7 L T 2 5驱 动 后 送 给 功 率 放 大 电 4VH4
1 稳定平台工作机理
稳定 平 台 主要 由 台体 框 架 、 电环 、 服传 感 导 伺
器、 动作 执行元件 和 电子伺 服 控制 组件 等组 成 。对
于平 台台体 框架 , 考虑 到 载体 运 动 中所 受 到 的不确
定 风阻力矩 的影 响 , 用 四框 架 两 轴 稳 定 结 构 , 采 将
路径传 递 到光轴 , 光轴 偏 离原 来 的惯 性 空 间 。安 使 装在 内环架上 的陀 螺感 受 到 该 干扰 速率 后 , 经放 大 校正后 驱动 内框 架 平 台轴 力矩 电机 , 生与 干扰 速 产
率 大小相 等 、 向相 反 的补 偿 速 率 , 光 轴 保 持 稳 方 使 定, 同时外 框 架 跟 随 内外 框 架 间 的 误 差 信 号 , 持 保
第 1 O卷
第 l期 8
2 பைடு நூலகம் 6月 0 0年
科
学
技
术
与
工
程
V0. 0 No 1 J n 0 0 11 . 8 u e2 1
17 —8 5 2 1 )84 7 —4 6 1 11 (0 0 1 ・5 00
Sine ehooyadE  ̄ne n c c cnlg n n ef g e T i
稳 定 回路 。采 用 正 余 弦 旋 转变 压 器作 为各 框 架 间
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
。在各 环架
图 5 俯仰环稳定回路校正前伯德图
电机以及方位俯仰陀螺性能参数确定以后, 还要通 过仿真分析滤波环节 , 校正环节的 具体参数, 指导 系统设计。本文给出俯仰环的稳定回路给出 SI MULI NK 仿真分析过程, 图 4 所示为单环稳定回路原理
图 6所示为校正后开环幅频特性, 在 6 H z处增益 提高了 2 . 1倍, 穿越频率约为 127 rad / s , - 3 dB 带宽约 45H z , 满足对输入信号的快速响应性的要求。图 7 所 示为回路阶跃响应曲线, 系统超调量约 25 % , 调节时间 约为 0 . 15 s , 过渡过程较短, 系统的动态响应速度较快。 图 8所示为回路对频率 0 . 5H z , 幅度为 0 . 05 N m 干 扰力矩的角度响应曲线, 俯仰回路的稳定精度可达 30 rad , 满足对稳定精度 50 rad的指标要求。
图 6 俯仰环稳定回路校正后伯德图
18 期
赵 冠军 , 等 : 一种机载稳定平台伺服控制系统的设计与实现
4573
的快速性, 以实现内外框架视 轴快速保持平 行, 在 系统调试过程中 , 为了获取理 想的稳定精度 , 需要 实现带宽足够宽 , 低频增益足 够高, 而 稳定平台的 低频谐振 可 考虑 通 过加 二阶 带 阻滤 波 器 来加 以 抑制。
m, 最大
效率为 84% , 额定电压为 30 . 0 V; 内框架电机的堵 m, 峰值堵转电流为 2 A, 额定
图 2 伺服控制系统电子线路原理框图
静摩擦力矩 静不平衡力矩 牵扯力矩 惯性阻力矩 风阻力矩 估算需要力矩
系统基于 CCS 编程开发平台, 应用 C 语言进行 代码开发设计 , 按照模块化编 程思路, 通过对系统 各个环节的分析建模 , 基于 MATLAB 仿真辅助设计 校正环节。程序开始先执行初始化程序 , 初始化芯 片的各个寄存器 , 然后进入中断等待。图 3 所示为 主程序流程及中断子程序流程。系统设置 1 m s定 时中断 , 进入中断后先进行数据采集 , 获得陀螺、 旋 变等传感器数据并进行数据处理, 然后读取上位机 所发可靠指令 , 跳转到相应的 各个回路子程 序, 执 行完后向上位机反馈信息 , 输出电机 P WM 控制信 号 , 通过功虑放大后使电机做出各种动作。 2 . 3 控制回路仿真 机载稳定平台集成 度高, 系统 结构复杂 , 在设
第 10 卷 第 18 期 2010 年 6 月 1671 - 1815( 2010) 18-4570 - 04
科
学
技
术
与
工
程
Sc ience T echno logy and Eng ineer ing
V o l 10 N o 18 June 2010 2010 Sc i T ech Engng
一种机载稳定平台伺服控制系统的设计与实现
4572
科
学
技
术
与
工
程
10 卷
度很低 , 将造成稳定精度不高。通过在回路前项通 道中用平方滞后校正环节 900 提高回路低频增益。 (0 . 033S + 1) /S
2 2
图 3 主程序流程及中断子程序流程
计和调试过程中, 基于 MATLAB 的计算与控制系统 仿真 , 便于算法分析 , 节省开发 周期
[ 5]
空兵器 , 2006 ; 4( 2 ) : 39 5 董小 萌 , 张
41
平 . 两轴稳 定平台的 过顶盲区 问题 . 北 京航空航 天 815
大学学报 , 2007 ; 7( 7 ) : 812
。在内框架速率 稳定
回路实现的前提下 , 需要考虑提高外框架随动回路
Design and R ealization of Servo Control Syste m on A irborne Stabilized P latfor m
2010年 3 月 5 日收到 第一作者简介 : 赵冠军 ( 1984 ) , 男 , 河 南上蔡人 , 助理工 程师 , 研
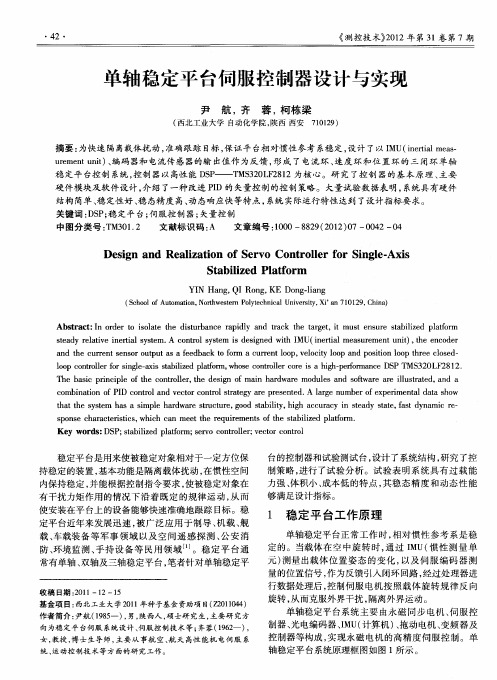
图 1 稳定平台框架示意图
矩电机却可直接在堵转状态下长期工作 , 具有转速 和转矩波动小, 机械特性和调节特性线性度好等优 点
[ 1]
, 同时兼顾机载稳定平台减重以及体积尺寸的
参 考 文 献
1 梅晓榕 , 自动控制元件及线路 . 哈尔滨 : 哈尔滨工业大学出 版社 , 2001; 2( 2) : 49 50
2 胡佑 德 , 马东升 , 张莉松 . 伺服系统 原理与设 计 . 北京 : 北京理 工 大学出版社 , 1999 : 148 160 3 胡 青 , 张志明 . 机载 多环 架光电 吊舱 伺服 控制电 机的 力矩 估 83
图 4 单环稳定回路原理框图
框图。图 4 中: Kp 为稳定回路总增益 , F ( S ) 为校正 网络传递函数 , M f 为干扰力矩 , R 为电机电枢电阻, Cm 为 电机力矩系数 , Ce 为电机反 电动势系 数, TL 为电机电气时间常数, Tm 为电机机电时间常数 , G ( S ) 为 陀螺 传递 函数 , 由于 光纤 陀螺 带宽 大于 1 k Hz , 陀螺反馈回路可以等效成增益为 1 的单位反 馈环节。电机输出力矩抵抗干扰力矩 , 直至转台相 对惯性空间的角速率为零。 图 5 所示为内俯仰环稳定回路校正前开环幅频 特性。由图 5 可知未校正时回路稳定 , 但其低频幅
起的几何约束耦合干扰力 矩只有通过平台减 震器 和四框架的结构得到衰减, 其他包括由平台实际挂 飞状态时平台气动外形不佳引起的风阻力矩、 基座 振动摇摆过程中轴承引起的摩擦力矩、 负载配重不 佳引起的质量静不平衡力矩、 系统布线时框架内部 柔性导线引起的牵扯力矩等, 都需要平台各环的电 机力矩来抑制 , 此外还要实现系统要求的动态指标 即最大角加速 度需求。通过对 各环架转动惯 量的 折算综合 , 按照 60 % 的力矩储备进行电机转矩以及 外减速比校算。表 1 所示为各框架参数力矩分析估 算表。系统设计外框架的总传动 比依次为 202 . 5 、 236 . 5 , 设计行星齿轮副的减速比依次为 2 . 5 1 、 5. 5 1 。伺服电机的最大连续转矩为 120 mN 转力矩均为 1 . 1N 电压为 27 . 0 V。
图 8 校正后内俯仰稳定回路对干扰的响应
算 . 光学与光电技术 , 2008; 10( 5) : 81
4 李 亦君 , 陈祖 金 . 某型光 电跟瞄平 台跟踪回 路的设计 与实现 . 航
对于方位 环稳 定回路 设计 , 与 俯 仰环 原理 相 同, 只是陀螺反馈 信号的处理上 , 出现了因 俯仰 环角度变化而成为变参数系统 , 需要在控制软件上 解决过顶盲 区的稳定问题
ZHAO Guan-Jun, ZHAO P in -ya
( C h ina A ir b orn eM issile A cadem y, Luoyang 471009 , P. R. Ch in a)
[ A bstract]
T he theory o f the a irborne four -g i m bals- t wo -ax is gyro stabilized platfor m and th e desig n of e lectron ic
中图法分类号
V 241. 5
对于运动载体中 的光学系统 , 视轴作为监 视、 侦察、 跟踪的基准 , 随着目标的 运动而在空间 发生 相对运动。设计机载稳定平台 伺服控制系统 目的 是为了承载光学系统且去 除载体振动和摆动 的干 扰, 保证视轴空间稳定, 实现视轴朝向控制。
1 稳定平台工作机理
稳定平台 主要由台体框架、 导电环、 伺服 传感 器、 动作执行元件和电子伺服控制组件等组成。对 于平台台体框架, 考虑到载体运动中所受到的不确 定风阻力矩的影响, 采用四框架两 轴稳定结构 , 将 可见光摄像机、 红外成像仪等光学系统安装在内框 架上 , 图 1 所示为稳定平台框架示意图。 系统采用光纤陀螺作为角速率惯性敏感元件, 方位和俯仰陀螺分别在内 框架的两转轴垂直 的环 架上 , 减少几何耦合 , 由此而形 成独立的陀螺 速率 稳定回路。采用正余弦旋转变 压器作为各框 架间 相对角位置 信息反 馈元件 , 由 此形 成位置 随动 回 路。直流伺服电机额定转 速高, 输 出力矩不大 , 且 低速性差 , 更不宜堵 转, 需结合 减速机构提高 驱动 力矩 , 才能带动低速 负载及大转矩 负载, 而直 流力
要求限制, 综合考虑, 设 计中采用直流 力矩电机作 为内框架执行元件, 采用直流伺服电机结合减速机 构作为外框架执行元件。 当基座出现扰动时 , 由于摩擦约束耦合和几何 约束耦合, 干扰速率沿着基座 外框架 内框架的 路径传递到光轴 , 使光轴偏离原来的惯性空间。安 装在内环架上的陀螺感受到该干扰速率后 , 经放大 校正后驱动内框架平台轴力矩电机, 产生与干扰速 率大小相等、 方向相反的补偿 速率, 使 光轴保持稳 定 , 同时外框架跟随内外框架 间的误差信号 , 保持 内外框架平行。
circu itry in th e servo contro l system are introduced . D ig ita l si m ulation w as used to test th e pitching velocity -stabi lized loop , Square - lag correction w as desig ned to i m prove the syste m stabilization accuracy . The resu lt show s that the design ing of servo con tro l syste m for the stable p latfor m is very applicab le and va lid . [ K ey words] gyro stab ilized p latfor m servo contro l square lag correction dig ita l si m u latio n