ERDAS 影像融合方法汇总(chimneyqin)
最新ERDAS和Photoshop协同处理遥感影像(保留坐标)汇总
E R D A S和P h o t o s h o p 协同处理遥感影像(保留坐标)本人可提供PS遥感插件,直接打开遥感格式影像数据,并且保留坐标,针对性强特别的方便。
如果您是做影像镶嵌匀色的,可以加我qq506442538或gaoshan_rs@或者者留下您的邮箱,我可以发一份安装软件,申请后可以免费使用一段时间,对于您紧急加工的影像数据项目解一下燃眉之急。
不用格式来回转换,直接用PS打开影像就可以操作ERDAS和Photoshop协同处理遥感影像(保留地理信息)问题描述:对于一幅带有地理信息的遥感影像,如果用Photoshop进行色彩处理,则地理信息会丢失,如何保证地理信息不变呢?一般的做法是使用世界文件(*.tfw)。
此时影像被分成了世界文件tfw和影像文件tif,可以对影像文件作各种处理,只要这两个文件在同一个目录下,且名字相同,则可以使用地理坐标,但是投影信息会缺失;同时,一个影像被分成了两个文件,使用起来不方便。
能否再将世界文件和影像文件合并起来呢?下面就解决这个问题。
1、打开原始影像,注意窗口的左下角,带有地理坐标和投影(UTM / WGS84):2、打开主面板的模块,打开格式转换对话框,选择Export,设置如下:里的Type可以选择TIFF或者GeoTIFF,但是不要选择TIFF(Direct Write)。
点击OK后弹出下面的对话框:一定要把Create Worldfile前的勾打上,此处是输出世界文件。
在保存的文件出,会有以下两个文件:ps.tfw和ps.tif,分别是世界文件和影像文件。
3、打开Photoshop,对ps.tif影像文件进行色彩处理。
在Photoshop中打开ps.tif时,影像会显示为灰色,如下图:此时是以多通道的方式打开影像,为了调整色彩,需要将多通道转换为RGB格式。
在Photoshop的右边找到通道面板:点击面板右上角的三角形,选择分离通道命令,此时影像被分为三个单幅影像:继续点击右边通道面板右上角的三角形,选择合并通道,弹出如下对话框:此处的模式选择RGB颜色,点击“好”按钮:指定RGB三颜色对应的波段,选择“好”按钮,则多通道影像转换为RGB格式:4、利用Photoshop的曲线功能对影像进行色彩处理,如下图:利用默认选择保存色彩调整的结果,格式为Tiff,命名为ps2.tif。
ERDAS 影像色彩样式复用方法
ERDAS影像色彩样式复用方法ERDAS中的影像数据根据实际类型分为Continous、Themetic两种,Continous是我们常用的光学影像数据,可用来进行各种数据处理;Themetic则为专题图数据,主要用来进行数据分析和后处理操作,这两种不同的数据类型,在进行色彩样式复用时采用的方法也不同。
Continous影像在色彩复用时采用breakpoint来实现,在影像色彩调整时应用较多。
Themetic专题图的色彩复用通过属性表的复用来实现,在分类成果后处理中应用中快速有效。
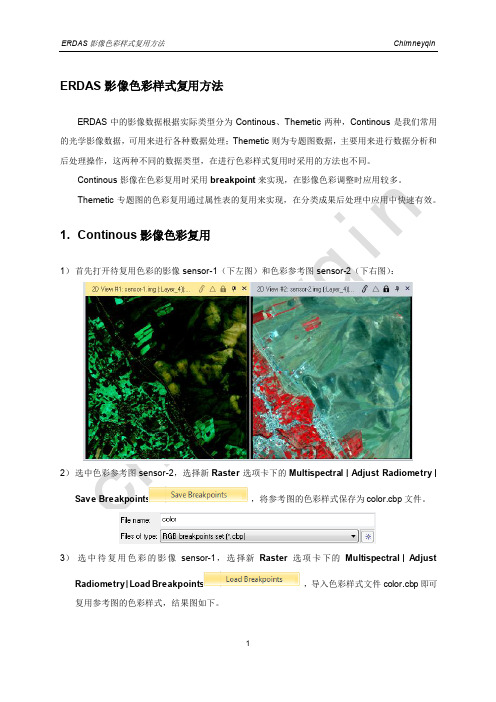
1. Continous影像色彩复用1)首先打开待复用色彩的影像sensor-1(下左图)和色彩参考图sensor-2(下右图):2)选中色彩参考图sensor-2,选择新Raster选项卡下的Multispectral | Adjust Radiometry | Save Breakpoints,将参考图的色彩样式保存为color.cbp文件。
3)选中待复用色彩的影像sensor-1,选择新Raster选项卡下的Multispectral | Adjust Radiometry | Load Breakpoints,导入色彩样式文件color.cbp即可复用参考图的色彩样式,结果图如下。
4) Contents列表中,选中sensor-1右键Save Layer即可保存色彩复用后的影像。
2. Themetic专题图色彩复用Thematic专题图色彩复用多用于某一分类图进行后处理后的色彩复用。
本例:分类图germtmclass(下图左)和分类后处理专题图germtmclass_new(下图右),需要将分类图的色彩复用给后处理专题图。
1)选中分类图germtmclass,选择新Raster选项卡下的Show Attributes查看该分类图的属性表,内包含分类信息和配色方案。
鼠标选中Color、Opacity、Class_names三列右键Export 将信息表输出到export.txt文件。
ERDAS影像融合操作流程
影象融合流程影像融合在影象解译模块和雷达影象处理模块中都有,但是雷达模块中的处理效果要相对好一些,下面就两个不同模块中的融合处理流程进行分别介绍。
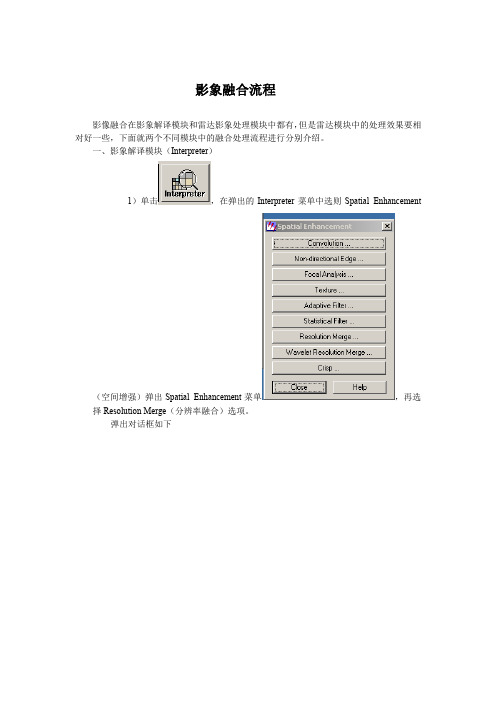
一、影象解译模块(Interpreter)1)单击,在弹出的Interpreter菜单中选则Spatial Enhancement(空间增强)弹出Spatial Enhancement菜单,再选择Resolution Merge(分辨率融合)选项。
弹出对话框如下在Resolution Merge对话框中需要设置下列参数(1)确定高分辨率输入文件(high Resolution input file);(2)选择影象波段;(3)确定多光谱输入文件(multispectral input file);(4)定义输出文件;(5)选择融合方法。
在分辨率变换中,erdas提供了三种融合方法Principal Component(主成分变换法)、Multipalcative(乘积变换)、Brovey transform(比值变换)。
其图象分别如下:Principal Component(主成分变换法)Multipalcative(乘积变换)Brovey transform(比值变换)(6)选择重采样方法。
系统提供了两种重采样方法Nearest Neighbor(邻近像元法)、Bilinbear Interpolation(二次线形内插)和Cubic Convolution(立方卷积)。
其中以Cubic Convolution方法最为平滑。
(7)确定Output Options输出图象选项。
选择Lgnore Zero Stats,可以忽略像素值为0的像素;(8)确定Layer Selection(输出图象波段组合);(9)确定Data Type(输出数据类型);(10)击OK按钮执行操作。
2)在Spatial Enhancement菜单中选择wavelet Resolution Merge(小波融合),弹出对话框如下:在wavelet Resolution Merge对话框中我们要设置参数:(1)确定高分辨率输入文件(high Resolution input file);(2)选择影象波段;(3)确定多光谱输入文件(multispectral input file);(4)定义输出文件;(5)选择融合方法在小波融合中,erdas提供了三种融合方法Principal Component(主成分变换法)、ISH(色彩变换)、Single Band(单波段变换)。
erdas介绍
ERDAS IMAGINE遥感图像处理软件ERDAS IMAGINE是ERDAS公司开发的面向企业级的遥感图像处理系统。
它以其先进的图像处理技术,友好、灵活的用户界面和操作方式,面向广阔应用领域的产品模块,服务于不同层次用户的模型开发工具以及高度的3S(遥感图像处理,地理信息系统和全球定位系统)集成功能,为遥感及相关应用领域的用户提供了内容丰富而功能强大的图像处理工具,代表了遥感图像处理系统未来的发展趋势。
ERDAS IMAGINE是容易使用的、以遥感影像处理为主要目标的软件系列工具。
不管您处理影像的经验或是专业背景如何,通过它,您能像老练的专家一样从影像中提取重要的信息。
ERDAS IMAGINE提供大量的工具,支持对各种遥感数据源,包括航空、航天;全色、多光谱、高光谱;雷达、激光雷达等影像的处理。
呈现方式从打印地图到3D模型,ERDAS IMAGINE针对遥感影像及影像处理需求,为您提供一个全面的解决方案。
它简化了操作,工作流化您的生产线,在保证精度的前提下,为您节省了大量的时间、金钱和资源。
ERDAS IMAGINE是业界唯一一个3S 集成的企业级遥感图像处理系统,主要应用方向侧重于遥感图像处理,同时与地理信息系统的紧密结合,并且具有与全球定位系统集成的功能。
ERDAS IMAGINE通过将遥感、遥感应用、图象处理、摄影测量、雷达数据处理、地理信息系统和三维可视化等技术结合在一个系统中,实现地学工程一体化结合;无需做任何格式和系统的转换就可以建立和实现整个地学相关工程。
呈现完整的工业流程,为用户提供计算速度更快,精度更高,数据处理量更大,面向工程化的新一代遥感图像处理与摄影测量解决方案。
ERDAS IMAGINE产品架构ERDAS IMAGINE面向不同需求的用户,对于系统的扩展功能采用开放的体系结构以IMAGINE Essentials、IMAGINE Advantage、IMAGINE Professional的形式为用户提供了基本、高级、专业三档产品架构,并有丰富的功能扩展模块供用户选择,使产品模块的组合具有极大的灵活性,遥感研究和应用的用户可以根据自己的要求、资金情况选择不同的软件级别,最大程度上满足需求。
erdas软件中的图像处理与增强汇总
实习步骤:
1、卷积增强 ① ERDAS图标面板上点击 图标,选择Spatial Enhancement\convoltion,打开对话框如下两幅图 所示:
② 选择参数:在上图中确定输入文件名称buguize.tif和输 出文件名称(如:33edgedetect.tif等),点击ok,进行卷 积增强处理。(请尝试和体会各种增强方法效果)
原图像
33模板纹理分析
55模板纹理分析
77模板纹理分析
d、图像辐射增强
实习目的:掌握直方图均衡化和匹配方法 实习内容:利用Interpreter模块实现遥感图像的直方
图均衡化和匹配处理
实习步骤:
1、直方图均衡化处理 ① 在ERDAS图标面板上选择 图标,选择 Radiometic Enhancement\Histogram Equaliation,打开下面对话框:
1、同时显示和观察多幅图像 启动软件。在视窗view#1中点击 图标,在打开 的对话框中选择“Raster Option”栏,如下图所示:
不选择“Clear Dispay”,勾选“Background Transparent”。然后 点击File,选择第一幅TM图像,……shixishuju2\124036zuhe. tif, 点击OK打开。如下图所示:
③ 在左图中选择Edit\Output Options (中),出现对话框(右),选择Union of All Inputs并设置X为50,Y为50,点 击ok,又一次回到下图。
4、输出拼接图像 在左图中选择Process\Run Mosaic(右上),出现对话框 (右下),确定输出文件的格式(tif)、路径和名称(pinjie), 点击ok,输出图像(需要约3分钟)。拼接后的图像如下所示:
(完整word版)ERDAS遥感影像处理
ERDAS遥感影像处理1、图像导入在erdas的Import/Export模块中,分别导入TM图像的第1、2、3、4、5、7波段,具体操作步骤为①点击import模块,打开对话框②选择type类型为TIFF③media为file;④然后选择输入、输出文件名路径和文件名⑤分别对123457波段进行导入;⑥在此之前可以选择session->preference,选择输入、输出主目录,方便以后操作。
2、图像波段合成在erdas的interpreter模块中将单波段影像进行合成,生成多波段文件,具体操作步骤为:interpreter->utilities->layer stack,①在出现的对话框中import框中依次选择需要合成的波段,每选择输入一个波段用Add 添加一次;② output file选择导出文件路径及命名文件。
③Data type 设为Unsigned 8 bit;④Output option 设置为Union (另一个是做波段分离的),选中ignore zero stats;⑤进行操作。
3、图像预览在开始进行分类之前,需要先仔细查看合成后的图像,确定卫片所覆盖的地理区域及海拔范围,确定主要的地标性元素。
由于卫片原始数据的差异,同样的地表覆盖物斑块在不同时期的卫片中或不同地区的卫片中显示的颜色都可能不同,所以在预览中,还要熟悉整个范围内的地表覆盖类型和不同地物之间的变化。
①打开显示窗口,加载裁切后的6通道的图像(4,3,2)或者(4、5、3)、(7,4,2);②把图像缩小至适合窗口,浏览图像,注意河流、城镇、植被、水体、土壤的分布;③选择特定区域放大,查看各种不同的地表覆盖物类型的分布及色调变化;根据经验,在4,3,2(RGB)的波段组合下,各种地表覆盖物类型的特点如下:a.森林——森林显示出棕色、红色、褐色等一系列多变的色调。
在高海拔地区,成熟针叶林为很浓的棕色或暗红色;在中低海拔地区,森林的颜色多变,从棕色到红色到暗绿色都有,部分落叶林在冬季呈现出锈黄色;b.灌丛和草甸——相对于临近的森林斑块,灌丛和草甸呈现出明亮许多的红色到浅红色。
基于ERDAS和PCI的高分辨率影像几种融合方法的分析比较
基于ERDAS和PCI的高分辨率影像几种融合方法的分析比较简述了ERDAS软件和PCI软件中几种常用的融合方法,采用QB的全色影像和多光谱影像,对几种常用的融合方法进行试验和分析,结果表明HPF融合、PanSharp融合这两种融合方法整体融合效果较好。
标签:影像融合;主成份变换;小波变换;HPF融合;PanSharp融合随着现代遥感技术的发展,人们可以获得不同空间、时间和光谱分辨率的遥感影像[1]。
使用融合后的影像比单独使用全色影像或者多光谱影像更为有效[2];融合后的影像有更丰富的细节信息,可以显著提高分类结果的准确性[3]。
影像融合是将全色高分辨率影像的纹理细节信息和多光谱低分辨率影像的色彩信息相结合,获得高分辨率的多光谱影像的一种技术。
对于许多遥感应用,尤其是基于GIS的应用,对影像既有清晰的纹理需求又有丰富的光谱信息需求,因此影像融合是遥感影像应用的关键。
文章分别使用ERDAS软件中的主成分变换法(PCA)、小波变换法(Wavelet)、HPF融合法和PCI软件中的PanSharp融合法对高分辨率影像QuickBird(以下简称QB)的全色影像和多光谱影像进行融合,并对不同的融合方法进行比较和分析。
1 影像融合方法1.1 主成分变换法(PCA)融合主成分变换(PCA,Principal Component Analysis),又称K-L变换,是建立在图像统计特征基础上的多维线性变换,具有方差信息浓缩、数据量压缩的作用,以高分辨率数据替代多波段数据变换以后的第一主成分来达到融合的目的。
具体过程:先由多光谱影像数据求得影像间的相关系数矩阵,根据相关系数矩阵计算特征值和特征向量,求得各主成分影像;再将高分辨率影像进行直方图匹配,使其与第一主成分影像数据具有相同的直方图;最后用直方图匹配生成的高分辨率影像来替换第一主成分,将它同其他主成分一起经逆主分量变换得到融合的影像[4]。
1.2 小波变换(Wavelet)融合小波变换融合方法是Mallat于1989年提出的小波的多分辨分析思想及小波的分解和重构快速算法,基本函数是一些小型波。
erdas图像的导入、校正、裁剪、融合基本步骤
数据可视化ERDAS第二次实习报告一、卫片的纠正1、TM图像的打开(1) Import-type:TM Landsat EOSAT Format-Input File:band1.dat-Output File:band1.img-OK2、SPOT图像的打开(1) Import-type:SPOT CCRS-Media:File-Input File:lead_01.dat-Output File:lead_01.img-OK3、TM图像的纠正(1) Dataprep-Image Geometric Correction-From Image File-band1.img-OK (2) Set Geometric Model-Landsat(3) Landsat Model Properetise-Parameters-Type:TM-Constant-Elevationg value:10:00(4) Landsat Model Properetise-Projection-Add/ChangeProjection-Custom-Projection Type:Gauss Kruger-SpheroidName:Krasovsky-Datuom Name:Krasovsky-OK(5) Landsat Model Properetise-Set Projection from GCP Tool-Keyboard Only-OK(6) GCP Tool-File-Load Input-tm:sh_i.gcc-OK(7) GCP Tool-File-Load Reference-tm:sh_r.gcc-OK(8)∑-Edit-Set Point Type-Check(9) Geo Correction Tools-Display Resample Image Dialog(10)Resample-Output File-tm_cor.img-Output CellSizes:X:10.00Y:10.00-Ignore Zero in Stats:打钩-OK4、SPOT图像的纠正(1) Dataprep-Image Geometric Correction-From ImageFile-lead_01.img-OK(2) Viewer-Show Information for Top Raster,Vector or Annotation Layer (3) Imagelnfo-Add/Change Projection-Custom-Projection:Gauass Kruger Spheroid:Krasovsky Datum:Krasovsky-关闭(4) Set Geometric Model-Polynomial(5) Polynomial Model Properetise-Projection-Add/ChangeProjection-Custom-Projection Type:Gauss Kruger-SpheroidName:Krasovsky-Datuom Name:Krasovsky-OK(6) Polynomial Model Properetise-Set Projection from GCP Tool-Keyboard Only-OK二、图像的裁切(1) Interpreter-Utilities-Vector To Raster(2) Vector To Raster-Input Vector File-huangpu.shp-Output Image File-huangpu_mask.img-Vector Type-Polygon-Use Attribute As Value 打钩-AREA-忽略零值打钩-Cell Size:X:10.00 Y:10.00-Square Cells打钩(3) Viewer-huangpu_mask.img-ImageInfo-Change MapInfo-Projection-Gauss Kruger-OK(4) ImageInfo-Add/Change Projection-Custom-Spheroid:Krasovsky-Datum Name:Krasovaky-OK(5) Utilities-Mask-Input Mask File:Huangpu_mask.img-Input File:spot_cor.img-Output File:Huangpu_rs.img-忽略零值打钩-OK 三、卫片的融合(1) Interpreter-Spatial Enhancenment-Resolution Merge(2) Resolution Merge-High Resolution InputFile:spot_cor.img-Multispectral Input File:tm_cor.img-OutputFile:outcome1.img-Method:Multiplicative-ResamplingTechniques-Cubic Convolution-Output Options-Stretch to Unsigned 8 bit;Ignore Zero in Stats打钩。
Erdas原始影像合成及融合

Erdas影像导入及融合 1.影像合成单击弹出下面对话框:单击input file右侧弹出:选择原始影像存放路径(如果打开无影像,注意选择files of type:的文件类型img/tiff)。
选择LO81190292014155BJC00_B1后,单击“ok”单击“add”后,显示如下:会出现:这个信息。
重复打开input file右侧,*_b2……*_b7依次载入,注意每加一张影像点击一次“add”。
然后单击output file右侧,选择文件存放路径。
将新生成的文件命名为LS8_O_影像生成时间_影像号(119029)_1-7(波段).img。
例如:LS8_O_20140604_119029_ 1-7.img选择,其他默认。
然后单击“ok”。
等待,直到:单击“dismiss”,然后单击“close”。
完成多光谱数据合成。
说明:一般做植被调查我们用“5、4、3”波段,所以在多光谱数据合成时,可以只选择“5、4、3(依次选择)”2.影像融合在erdas软件中打开单击Wavelet Resolution Merge(小波变换),打开如下对话框:在High Resolution Input File:中输入要融合的高分影像(landsat8中的*_B8), 在Multispectral Input File:中输入多光谱影像(也就是1中合成的影像), 在Output File:为输出文件路径及命名,命名规则:文件名后加_r.img。
例如:LS8_O_20140604_119029_543_r.img选择融合方法和技术均为默认,将勾选。
完成后单击“ok”,弹出窗口:等待,知道出现下面窗口:单击“Dismiss”,然后单击“Close”,完成图像的融合。
之后,在erdas中将融合后的影像和未做融合的多光谱影像打开:在影像显示区右键,选择Swipe,进行卷帘对比。
3.Erdas融合与ENVI融合优缺点对比ENVI融合的优点在于不用进行多光谱影像的合成,直接打开原始影像中的*_MTL.txt,与*_B8.TIFF直接进行融合,但是缺点是融合过程时间非常的长(对于一般的图像处理电脑来说,对于图形工作站没有经验数据),而且融合后的影像是全波段的,我们只用“5、4、3”波段就可以了啊,还有个缺点就是融合后的影像丢失地理参考信息(不知道是不是我方法问题)。
ERDAS影像融合
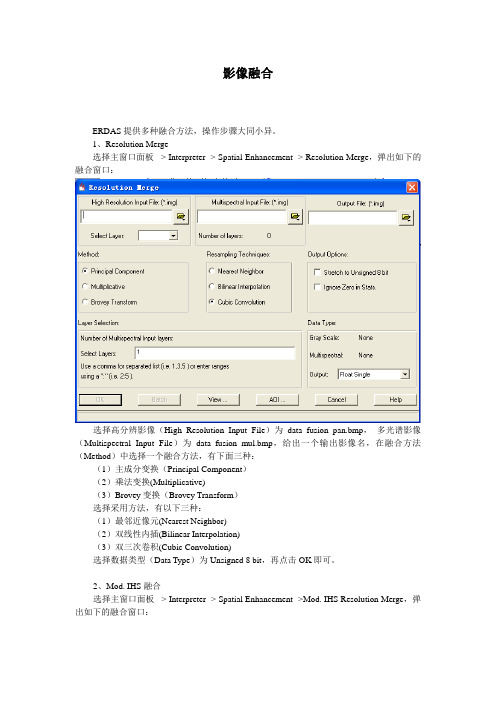
影像融合ERDAS提供多种融合方法,操作步骤大同小异。
1、Resolution Merge选择主窗口面板-> Interpreter -> Spatial Enhancement -> Resolution Merge,弹出如下的融合窗口:选择高分辨影像(High Resolution Input File)为data_fusion_pan.bmp,多光谱影像(Multispectral Input File)为data_fusion_mul.bmp,给出一个输出影像名,在融合方法(Method)中选择一个融合方法,有下面三种:(1)主成分变换(Principal Component)(2)乘法变换(Multiplicative)(3)Brovey变换(Brovey Transform)选择采用方法,有以下三种:(1)最邻近像元(Nearest Neighbor)(2)双线性内插(Bilinear Interpolation)(3)双三次卷积(Cubic Convolution)选择数据类型(Data Type)为Unsigned 8 bit,再点击OK即可。
2、Mod. IHS融合选择主窗口面板-> Interpreter -> Spatial Enhancement ->Mod. IHS Resolution Merge,弹出如下的融合窗口:分别输入高分辨和高光谱影像,选择采样方法,选择高分辨率影像和高光谱影像的传感器类型,选择输入影像的分辨率比(Ratio Ceiling),在Layer Selection标签中选择指定的RGB三个波段,在Output标签中选择输出影像名称,点击OK即可完成融合操作。
由于此方法需要知道输入影像的传感器类型,不同传感器类型有不同的融合参数,因此在无法得到传感器类型的情况下,此方法不太好用。
3、HPF(高通滤波)融合选择主窗口面板-> Interpreter -> Spatial Enhancement ->HPF Resolution Merge,弹出如下的融合窗口:选择输入的高分辨率和高光谱影像,选择一个输出文件和输出类型(Unsigned 8 bit),其他参数可以默认,也可以修改。
基于ERDAS软件的影像融合方法对比研究
基于ERDAS软件的影像融合方法对比研究
张婷婷 (辽宁省基础测绘院,辽宁锦州121000)
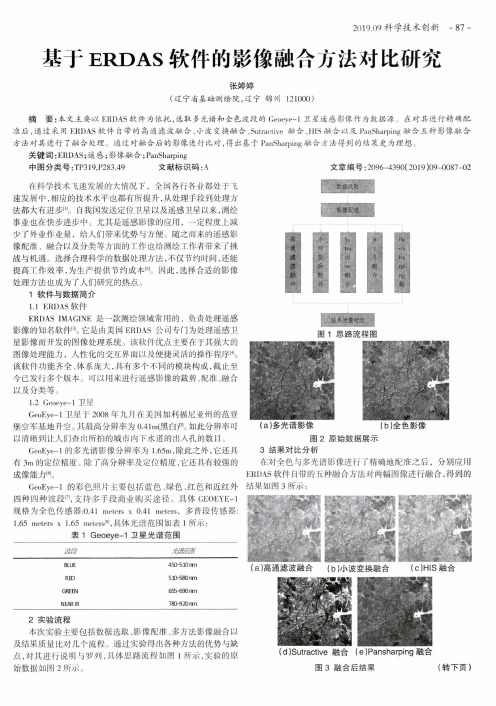
摘 要:本文主要以ERDAS软件为依托,选取多光谱和全色波段Geoeye-1卫星遥感影像作为数据源。在对其进行精确配
准后,通过采用ERDAS软件自带的高通滤波融合、小波变换融合、Sutractive融合、HIS融合以及PanSharping融合五种影像融合
点,对其进行说明与罗列,具体思路流程如图1所示,实验的原 始数据如图2所示。
(d )Sutractive 融合(e)Pansharping 融合
图3融合后结果
(转下页)
-88- 科学技术创新2019.09
关于全国卫星导航定位服务系统统筹建设的若干思考
李兆铭 (哈尔滨泰克斯传媒有限责任公司,黑龙江哈尔滨150000)
可以给相关工作的开展提供一些参考。
关键词:卫星导航;定位服务;统筹建设;系统构架
中图分类号:TN967.1
文献标识码:A
文章编号:2096-4390( 2019 )09-0088-02
现在不同国家的卫星有定位服务系统的建设水平有一定的 区别,我国作为发展中国家来说也是如此,在卫星基站的建设 上存在分布不均匀、地区发展差异大以及系统间无法形成互联 的问题,数据共享难度较高。应用全国卫星导航系统的整合和 规范,可以形成全国的导航定位系统的平衡发展,建设起一个 可以协调发展、为用户提供高质量定位服务的系统,填补空白, 进一步促进我国测量地理信息事业的可持续发展。
1.3提高资源利用率。各地区用于建设卫星导航定位服务系 统的主要投资来源大多是国家的拨款,但是现阶段的各系统间 无序建设,很容易造成建设重复的问题,进而形成资源浪费。对 全国卫星定位服务系统资源进行统一协调,就可能实现服务的 高效性和完整性,在不同的地区间形成多方位的服务体系,共同 发挥出卫星基准的作用,这样也可以让我国的基础设施建设利 用效率得到充分提高。
如何在ERDAS中进行影像融合的批处理
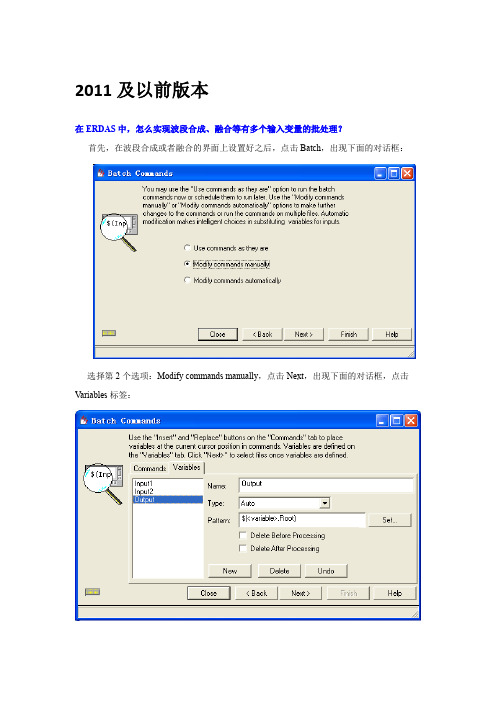
2011及以前版本在ERDAS中,怎么实现波段合成、融合等有多个输入变量的批处理?首先,在波段合成或者融合的界面上设置好之后,点击Batch,出现下面的对话框:选择第2个选项:Modify commands manually,点击Next,出现下面的对话框,点击Variables标签:因为波段合成和融合的批处理,输入的都是多个Input,所有需要手动建立Input变量。
假设做融合的批处理,那么就点击New2次,选择建立2个Input变量,然后建立一个Output 就可以了。
Input的类型都是User,Output的类型是Auto,点击Pattern给输出文件一个命名。
然后点击Commands标签,手动修改命令行:原始的命令行为:modeler -nq resmergepc.pmdl -meter -state "c:/program files/erdas/geospatial imaging 9.3/examples/quickbird_pyramids_pan.img" 1 "c:/program files/erdas/geospatial imaging 9.3/examples/quickbird_pyramids_ms.img" "d:/temp/sd.img" Float_Single 'Bilinear Interpolation' useall 4 0 "None" 1:4我们需要把上面的粉色的命令用变量代替,命令行变为:modeler -nq resmergepc.pmdl -meter -state "$(Input1)" 1 "$(Input2)" "$(Output)" Float_Single 'Bilinear Interpolation' useall 4 0 "None" 1:4然后点击Next,把数据进行输入。
ERDAS操作技巧

加载波段成影像:interpreter---utilities---layer stackERDAS 操作小技巧:1、配准影像图:从Viewer 中 打开两幅图(一幅参照,一幅配准) 从菜单栏Raster 中 选Geometric correction (几何校正) 在Set Geometric Model 中选Polynomial ,后点击ok ,打开Polynomial Model Properties 对话框,在Parameters 中Polynomial Order (多项式次方)中选1或2[最少GCP 公式:2)2)(1++n n (],在Projection (投影参数)中Map Units 选Meters 点击Add/Change Projection 在Custom 中选择所需的Projection Type ,Spheroid Name ,Datum Name ,Scale factor at central meridian ,Longitude of central meridian (可以参考参照图中Imagine info 中的信息),Latitude of origin of projection ,False easting (一般选500000meters ),False northing (一般忽略为零),点击Ok Set Projection from GCP Tool 中选择Collect Reference Point From (选择视窗采点模式)中的 Existing Viewer 选项,Ok 。
RMS 误差(均方根)=22)()i r i r y y x x -+-(这里:x i 和y i 是输入的原坐标;x r 和y r 是逆变换后的坐标定义:RMS 误差是指GCP 的输入(原)位置和逆变换的位置之间的距离(或者说是在用转换矩阵对一个GCP 作转换时,所期望输出的坐标与实际输出的坐标之间的偏差)。
ERDAS中图像的转换、合成、几何校正
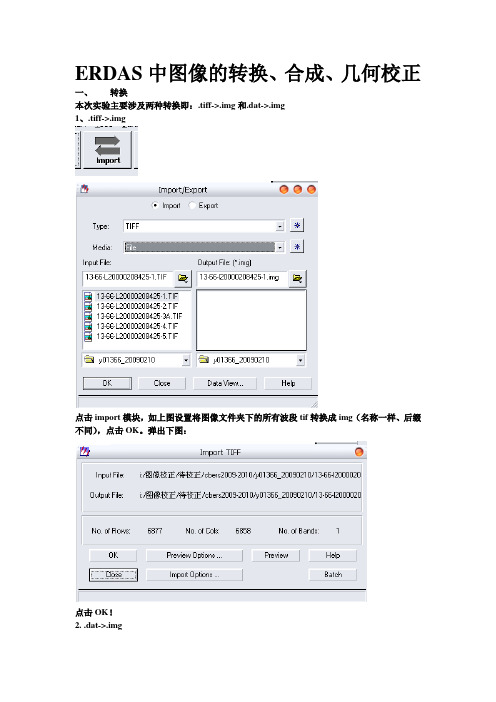
ERDAS中图像的转换、合成、几何校正一、转换本次实验主要涉及两种转换即:.tiff->.img和.dat->.img1、.tiff->.img点击import模块,如上图设置将图像文件夹下的所有波段tif转换成img(名称一样、后缀不同),点击OK。
弹出下图:点击OK!2. .dat->.img遇到图像文件夹下波段数据是.dat,首先打开.self文件(用写字板)看到如下信息:(转换的时候需要输入如下信息)如图进行设置,同样所有波段都要转成img。
点OK,弹出如下窗口(用刚才.self文件里的信息修改红色区域,每一个文件夹下的.dat都用同一个.self)点击ok!二.合成将刚刚转换成img的图像在Input File依次打开(1、2、3……),每加一幅点一次Add,选择output file(名字取去掉波段号的图像名称),最后如下图:点击OK。
三、投影转换本次实验要将合成好的图片进行投影转换:在input file 里选择合成后的img ,选择output file (名字在合成的图像名称前加一个Z )点击弹出:点击savesave as 后的名称自定!这样存了之后做下一张图的时候就可以在下图里选择:(比如我存的是gjw,就可以在这里直接点,不用在设置刚才设置的参数)点击OK !出现下图:点击ok!投影转换成功!四、几何校正首先要新建两个View,在view1中打开转好投影的图像,在view2中打开对应的纠正图像,如下图:打开之后按以下步骤操作:点击再加view1里的图像,弹出如下窗口,选择Ploynomial,点击OK!弹出如下窗口:(点击close)之后弹出:点击OK ,然后再点一下view2里面的图像,会弹出一个投影信息的窗口,同样点击OK!此时会出现如下界面:将view1,view2放大到像元级别,在最下面的窗口的工具栏点击,在view1中选择一个控制点,在view2中找到同样的位置,也选择同样的点(在view1中选择比较容易区分的像元,如:河口,河的交叉处,山脉上容易区分的点,这样在view2里面就比较容易找到对应的位置),这样先在view1选择,再在view2中选择完三个控制点之后,第四个控制点在view1中确定之后,view2 中会自动生成对应的控制点,如果偏差较小,则可移动view2中的第四个控制点到对应的位置,如果偏差比较大,则表明前面三个控制点选取出现了问题。
基于ERDAS IMAGINE9.2操作平台的遥感图像融合概述
基于ERDAS IMAGINE9.2操作平台的遥感图像融合概述洪梅
【期刊名称】《科技广场》
【年(卷),期】2012(000)003
【摘要】随着遥感技术的迅猛发展,各种遥感数据相应呈现。
如何让数据得到充分的应用?数据融合在当今社会显得越来越重要;如何更好地对数据进行融合?我们必须了解各种融合方法的优缺点。
本文介绍了ERDAS IMAGINE9.2操作平台上的几种遥感图像融合,分别是分辨率、小波变换、改进IHS、高通滤波融合,并通过实验比较几种融合方法的优缺点以及探讨未来可能研究方向。
【总页数】4页(P56-59)
【作者】洪梅
【作者单位】东华理工大学测绘工程学院,江西南昌330000
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Erdas9.2平台进行遥感影像分类的各种方法与比较 [J], 文馨
2.基于ERDAS 9.2平台的遥感专题信息提取和专题图制作 [J], 曹劲舟
3.基于ERDAS IMAGINE操作平台的遥感图像处理 [J], 杨金香;程学丰
4.基于ERDAS IMAGINE 9.1平台的遥感影像标准地图分幅的快速处理 [J], 宋杨
5.基于ERDAS9.1操作平台的遥感专题图制取 [J], 胡堃
因版权原因,仅展示原文概要,查看原文内容请购买。
erdas多波段融合
ERDAS问题:影像的融合图象融合图象的分辨率融合是对不同空间分辨率遥感图象的融合处理,使处理后的遥感图象既具有较好的空间分辨率,又具有多光谱特性,从而达到图象增强的目的。
2张原图,其中高分辨率的黑白图的分辨率是另一张图的4倍原图:高分辨率黑白图低分辨率彩色图一由于两副原图太大,我们先各对相对应的部分进行截图,这里的操作是图象的规则分幅裁剪。
我选择的是两图左上角的部分截取后处理的高分辨率黑白图截取后处理的低分辨率彩色图二再对处理过的截图进行图象几何校正彩色图为需要校正的图象,黑白图作为地理参考的校正过SPO T图象进行控制点的采集得到校正后的彩色图象三进行分辨率融合确定高分辨率输入文件为黑白图确定多光谱输入文件为校正后的彩色图定义输出文件选择融合的方法和重采样的方法不同的融合方法得出不同的融合结果图象1主成分变换法(princi ple compon ent),它是建立在图象统计特征上的多维线性变换,具有方差信息浓缩和数据压缩的作用,可以更准确地揭示多波段数据结构内部的遥感信息,常常以高分辨率数据替代多波段数据变换以后的第一组成分来达到融合目的。
具体过程:(1)对输入的多波段遥感数据进行主成分变换;(2)以高空间分辨率遥感数据替代变换以后的第一组成分;(3)进行主成分逆变换,生成具有高空间分辨率的多波段融合图象。
(主成分变换融合法得到得融合图象)2乘积方法(m utipl i cati ve),它是应用最基本的乘积组合算法直接对两种空间分辨率的遥感数据,即把多波段图象中的任意一个波段值与高分辨遥感数据的乘积赋给融合以后的波段数值。
(乘积方法得到得融合图象)3比值方法(b rovey transform),是把多波段图象中的红、蓝、绿波段的数值占三波段和的比率与高分辨率遥感数据的乘积各赋给融合后波段图象的红、蓝、绿波段数值上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ERDAS 影像融合方法汇总影像融合是指将多源信道所采集到的关于同一目标的影像数据经过影像处理和计算机技术等,最大限度的提取各自信道中的有利信息,最后综合成高质量的影像,以提高影像信息的利用率、改善计算机解译精度和可靠性、提升原始影像的空间分辨率和光谱分辨率,利于监测。
ERDAS IMAGINE 提供多种影像融合方法,且支持带RPC模型的影像融合处理。
1、(14个波段(蓝/像也为Step4: 利用低通滤波器(5×5)对多光谱影像进行滤波处理,输出多光谱滤波影像。
Step5: 利用相减法对全色锐化影像、全色滤波影像进行相减处理,并将全色锐化影像按照权重融合到多光谱滤波影像各个波段,输出新多光谱影像。
(2)参数说明Input Sensor Type 待融合影像传感器类型,分为Quickbird、IKONOS、Format三种传感器。
输入影像要求:多光谱和全色分辨率比为4:1、同时获取、为同一个传感器,全色为单波段,多光谱为4波段。
Sharpening Filter Center Value3×3锐化卷积窗口中心值,其他值都为-1,默认值根据传感器变化,范围值为11、14、17、20、23、1000,小的中心值会产生更好的锐化效果。
一般来说,大分辨率影像锐化程度要求低,小分辨率影像锐化程度要求高,若全色影像已经经过锐化处理,此处选择1000。
Pan Contribution Weight融合时全色图像所占的比重(权重),范围为0.7-1.3,默认值根据传感器变化,小的锐化值会产生更好的锐化效果。
Create image of subset area根据子区的坐标来定义融合影像范围。
Create image of full area输出所有区域的融合影像,这个范围是全色和多光谱影像的交集(intersect)。
该项勾选时才可设置融合影像成果名称和存放路径。
Null Value 设置输出图像空值的数值。
Mask input Null Values 勾选该项时,可设置输出图像空值。
2、HPF Resolution Merge 高通滤波融合(1)算法说明高通滤波融合采用高通滤波算法(High Pass Filter, HPF)来实现影像融合。
一副影像由不同频率的成分组成,根据图像频谱概念,高的空间频率对应影像中灰度急剧变化的部分,低的频率代表图像中灰度缓慢变化的部分。
高频分量包含影像的空间结构,低频分量包含影像的光谱信息。
高通滤波算法采用高通卷积滤波算子(high pass convolution filter kernel,HPK)来提取高空间分辨率影像中的空间信息,采用像元相加的方法将其加到低空间分辨率的多光谱影像上,实现影像融合目的。
高通滤波算法步骤:Step1: 计算R(比率)。
Step2: 创建高通卷积滤波算子对高分辨率影像进行高通滤波输出高通滤波影像。
Step3: 多光谱影像重采样,分辨率与高通滤波影像一致。
Step4: 将高通滤波影像按照权重融合到多光谱各个波段,输出新多光谱影像。
Step5: 将新多光谱影像进行拉伸处理,使其与原始多光谱影像均值和标准偏差一致。
(2)参数说明R多光谱影像分辨率与高分辨率影像分辨率的比率,自动计算(直接影响后续参数的选择),该值应该大于1。
Kernel Size高通滤波(High Pass Filter, HPF)卷积算子窗口大小。
根据R值来确定、默认即可,用于高分辨率影像处理。
Center Value高通滤波算子窗口中心值,该窗口其他值为-1。
根据R值来确定、默认即可,用于高分辨率影像处理。
Center value /HPK Size options based on HPK3()IHS彩色空间的变换成为IHS变换。
IHS彩色空间中,亮度I反映图像中地物反射的全部能量和图像所包含的空间信息,代表影像的地面分辨率;色度H指组成色彩的主波长,由红绿蓝的比重所决定;饱和度S代表颜色的纯度,H/S代表影像的光谱分辨率。
改进IHS融合采用全色高分辨率影像替换I分量从而使影像同时具有高空间分辨率和高光谱分辨率,融合步骤如下:Step1: 将多光谱影像进行IHS变换,从RGB空间转换至IHS空间。
Step2: 将全色影像与分量I进行直方图匹配,输出新全色影像。
Step3: 将新全色影像作为分量I与分量H、S形成新的IHS图像。
Step4: 将新的IHS图像进行IHS逆变换转换成RGB空间,输出融合后多光谱影像。
改进IHS融合克服了传统IHS融合只能输出三个波段影像的问题。
比如:Quickbird多光谱包含4个波段,可采用432、321组合进行两次迭代融合输出4321融合影像。
(2)参数说明Clip Using Min/Max用多光谱像元的最大最小值来规定重采样后多光谱影像数据的像元值范围,重采样方法选择三次卷积时生效,因为其他两种重采样方法不会超过原来的像元值范围。
波段列表中的字段:Low\High是该波段的波长最低值和最高值,Center是该波段的波长中心值(均值),Range是该波段的波长跨度(High-Low),Overlp是该波段波长范围与全色波长的重叠范围,Beta=Overlap/Pan_Range即重叠范围与全色波长范围的比值。
Resampling Technique重采样方法,提供最邻近、双线性内插和三次卷积,默认双线性内插法。
影像融合过程中重采样方法的选择:根据全色多光谱的相对分辨率来确定。
1) 最近邻法:边缘效应比较强的影像采用最邻近法输出的融合影像仍旧存在。
2) 双线性内插法:全色分辨率较低、多光谱全色分辨率比率太小为2:1甚至更低时(如Landsat全色15m、多光谱30m)采用,效果较好、处理速度较快。
3) 三次卷积法:全色分辨率较高,多光谱全色分辨率必须为4:1甚至更高时(如IKONOS全色1m、多光谱4m)采用,能输出较好的重采样结果。
某些情况下,采用三次卷积法重采样会造成结果错误,这是由于该采样方法会改变多光谱的最大最小像元值范围造成的。
实际应用中,对于大文件数据的影像融合,考虑处理速度和结果的正确性,推荐使用双线性内插法;如果数据量较小,可尝试使用三次卷积法。
Sensor分别选择高分辨影像、多光谱影像的传感器类型。
支持的传感器类型包括:EO-1 ALI、FORMOSAT-2、GeoEye-1、IKONOS、IRS、Landsat 7/8/8 Cirrus、OrbView-3、Pleiades、QuickBird、SkySat、SPOT 4/6/7、WorldView-1/2/3。
Sensor分别选择高分辨影像、多光谱影像的传感器类型。
支持的传感器类型包括:EO-1 ALI、FORMOSAT-2、GeoEye-1、IKONOS、IRS、Landsat 7/8/8 Cirrus、OrbView-3、Pleiades、QuickBird、SkySat、SPOT 4/6/7、WorldView-1/2/3。
Ratio Ceiling设置亮度修正系数的上限。
Batch 支持影像融合批处理操作。
AOI 支持导入AOI文件输出感兴趣区域内的影像融合结果。
Layer Combination Method多光谱组成方法,默认True Color,提供多种选择方法: True Color(真彩色)、False Color IR(假彩色)、Desktop RGB(真彩色)、Desktop BRG(真彩色)、Preference(推荐设置)和Custom(自定义组合)。
Computation Method 计算方法,默认是Single pass – 3 layer RGB(只用所选的三个波段进行输出图像计算),还提供Iterate on multiple RGB combinations(选择多余三个波段进行输出图像计算)输出多波段融合影像。
Add to Iteration list 将当前组合方式添加至迭代列表,当计算方式为Iterate on multiple RGB combinations时可用。
Input to Output Layer Mapping RGB空间到IHS空间转换的波段组合。
Output Files影像融合结果输出路径和名称。
Number of layers影像融合结果波段数。
Data Type 可查看原始影像数据类型、设置输出成果数据类型。
Ignore Zero in Output Statistics勾选时,影像融合结果统计计算时忽略0值。
Ignore Zero in Raster Match勾选时,影像匹配计算时忽略0值。
4、Wavelet Resolution Merge 小波变换融合(1)算法说明小波变换类似于傅里叶变换,不同的是小波变换基于一些小型波,将图像分解成频率域上各个频率上的子图像,来代表原始图像的各个特征分量,因此小波变换融合可根据不同的特征分量采用不同的融合方法来达到最佳的融合效果。
一副图像的小波分解中,绝对值较大的小波高频系数对应亮度急剧变换的点,即图像中对比度变化较大的边缘特征,如边界、亮线及区域轮廓,小波变换融合就是保留此类显著的特征,比如融合前图像A中比图像B中显著,融合后图像中A中的目标被保留,B中的目标被忽略。
小波变换就是基于不同图像中A、B目标的小波变换系数在不同分辨率水平上的主要地位来确保图像中A、B 显著目标都保留。
(2)参数说明Spectral Transform多光谱影像转换为单波段灰度图的方法,提供三种方法:Single Band:选择指定波段,可自定义使用波段数为任意波段(1,2,3,4等)。
IHS:对多光谱进行IHS变换,使用亮度I分量进行融合,仅输出三波段融合成果。
Principal Component:对多光谱进行主成分变换,使用第一主成分进行融合。
Layer Selection 设置用于影像融合的多光谱影像波段。
Resampling Techniques重采样方法,提供Nearest Neighbor(最邻近)和Bilinear Interpolation(双线性内插)两种。
Data Type 可查看原始影像数据类型、设置输出成果数据类型。
Stretch to Unsigned 8 bit 勾选选项时,output无法设置输出类型,输出文件的像元范围拉伸到0~255范围内,并提供两种拉伸方法: Standard Deviation stretch(标准差拉伸)、Min-Max stretch(最大最小值拉伸)。
一般不推荐在融合时进行降位处理。
Ignore Zero in Stats.勾选选项时,影像融合结果统计计算时忽略0值。