焊接变位机技术说明书、技术方案、技术协议、技术标书
3吨焊接变位机技术参数表

3吨焊接变位机技术参数表(原创版)目录一、引言1.1 焊接变位机的定义和作用1.2 3 吨焊接变位机的重要性二、3 吨焊接变位机的技术参数2.1 负载能力2.2 转速2.3 旋转角度2.4 工作台尺寸2.5 控制系统三、3 吨焊接变位机的应用领域3.1 造船业3.2 机械制造业3.3 汽车制造业四、结论4.1 3 吨焊接变位机的重要性4.2 3 吨焊接变位机的发展前景正文一、引言1.1 焊接变位机的定义和作用焊接变位机,顾名思义,是一种用于焊接作业的机械设备。
它可以在一定范围内旋转焊接工件,使得焊接过程更加方便和安全。
焊接变位机在现代工业生产中发挥着重要作用,不仅可以提高焊接质量,还可以提高生产效率。
1.2 3 吨焊接变位机的重要性在众多焊接变位机中,3 吨焊接变位机具有举足轻重的地位。
它的负载能力、转速、旋转角度以及工作台尺寸等技术参数都符合大部分焊接作业的需求,因此被广泛应用于各个领域。
二、3 吨焊接变位机的技术参数2.1 负载能力3 吨焊接变位机的负载能力指的是该设备在一次操作中所能承受的最大重量。
对于 3 吨焊接变位机来说,其负载能力为 3 吨,足以应对大部分焊接作业的需求。
2.2 转速转速是指焊接变位机在工作时的旋转速度。
3 吨焊接变位机的转速可以根据实际需求进行调整,以满足不同焊接作业的要求。
2.3 旋转角度旋转角度是指焊接变位机在工作时可以旋转的角度范围。
3 吨焊接变位机的旋转角度一般为 360 度,这样可以满足各种焊接作业的需求。
2.4 工作台尺寸工作台尺寸是指焊接变位机上的工作平台尺寸。
3 吨焊接变位机的工作台尺寸可以根据用户需求进行定制,以满足不同焊接作业的要求。
2.5 控制系统3 吨焊接变位机的控制系统一般采用先进的 PLC 控制系统,操作简便,易于上手。
三、3 吨焊接变位机的应用领域3.1 造船业在造船业中,焊接作业是必不可少的环节。
3 吨焊接变位机可以大大提高造船业的焊接质量和效率。
焊机技术协议书范本

焊机技术协议书范本甲方(需方):_____________________乙方(供方):_____________________鉴于甲方需要购买焊机设备,乙方具有提供该设备的能力,双方本着平等互利的原则,经友好协商,就焊机的技术要求、性能标准、质量保证等技术事项达成如下协议:一、设备名称及型号1. 设备名称:焊机2. 设备型号:__________二、技术规格和性能要求1. 乙方提供的焊机应符合国家及行业相关标准,具体技术参数详见附件一《焊机技术参数表》。
2. 焊机应具备以下性能:- 能够适应甲方生产所需的焊接工艺要求;- 稳定性能,保证连续工作时的可靠性;- 安全性能,符合国家安全标准。
三、质量保证1. 乙方保证所提供的焊机设备是全新的,未使用过的,并且采用优质材料和先进工艺制造。
2. 乙方应提供至少一年的质保期,自设备交付之日起计算。
四、技术资料1. 乙方应向甲方提供完整的技术资料,包括但不限于操作手册、维护手册、电路图等。
2. 技术资料应以书面形式提供,并确保内容的准确性和完整性。
五、技术培训1. 乙方负责对甲方的操作人员进行技术培训,确保操作人员能够熟练使用焊机。
2. 培训内容包括设备的操作、日常维护、故障排除等。
六、售后服务1. 乙方应提供及时有效的售后服务,包括但不限于技术咨询、设备维修等。
2. 在质保期内,因设备本身质量问题导致的故障,乙方应负责免费维修或更换。
七、违约责任1. 如乙方提供的焊机设备不符合本协议规定的技术要求,甲方有权要求乙方更换或退货,并要求赔偿由此造成的损失。
2. 双方应严格遵守本协议,任何一方违反协议条款,应承担相应的违约责任。
八、争议解决本协议在执行过程中,如发生争议,双方应通过友好协商解决;协商不成时,可提交甲方所在地人民法院诉讼解决。
九、协议的生效、变更和终止1. 本协议自双方授权代表签字盖章之日起生效。
2. 本协议的任何修改和补充,须经双方协商一致,并以书面形式确认。
KP-S说明书(通用)
使用说明书焊接变位机KP-60S.150S.300S非常感谢您购买我们的变位机。
请您在使用之前仔细阅读使用说明书并且正确使用。
阅读完说明书之后请您妥善保管说明书及其他附件。
目录1.安全信息 (2)2.设备概要 (6)3.操作 (7)4.装卸工件时的注意事项 (9)5.安装 (10)6.维修保养 (12)7.故障发现要领 (14)8.售后服务与保证 (15)9.机构简图及外形图 (16)10.主要零部件 (19)KOIKE SANSO KOGYO CO.,L TD.授权制造唐山开元特种焊接设备有限公司§1. 安全信息请务必阅读防止触电: 触电可能引发重大事故。
1) 操作时请使用绝缘的干燥手套、靴子、衣服等。
2) 焊机打开的时候,在焊条(或焊丝)、被加工工件及变位机中均有电流存在。
如果穿着湿衣服与带电部分接触会造成触电。
3) 在不使用时或维修保养时,请切断主电源。
4) 请不要在湿度较高的环境中使用。
5) 请正确安装地线。
6) 请在电源供给侧安装指定容量的保险丝、断路器。
警 告:焊接变位机及其他机器在使用前都必须仔细阅读使用说明书以防止操作者及其附近人员发生事故。
防止眼睛及皮肤受伤:焊接时焊接地线及飞溅可能产生紫外线与热能会对眼睛和皮肤造成损伤。
1)为了保护眼睛和脸部,请使用合适的焊接防护用具(如眼镜、安全帽等)。
2)为了防止烫伤,请用长手套、安全帽、衣服等将身体外露部分盖上。
3)必须警告作业附近的其他工作人员使用防护用具(如眼镜、安全帽等)。
防止有害气体的损害:焊接所产生的气体是有害的1)请勿吸入焊接时所产生的气体焊接时,为了避免有害气体,作业场所要保持通风,空气畅通。
当对含有亚铅、铅、镉等镀锌材料进行焊接时,会产生有毒气体及粉尘,此时必须备有排烟装置。
防止爆炸事故1)对装有可燃性物质的容器不要进行焊接,可能会引起爆炸。
2)在对类似罐状容器进行焊接作业时请确定焊接是否会产生可燃性、有毒的蒸气,进行正确的焊接作业。
台式焊接变位机设计说明书
台式焊接变位机设计说明书第一章焊接变位机械性能及结构1.1 焊接变位机械概述焊接变位机械是改变焊件、焊机或焊工位置来完成机械化、自动化焊接的各种机械装置。
焊接变位机械可分为三大类:(1)焊件变位机械:包括焊接变位机、焊接滚轮架、焊接回转台和焊接翻转机。
(2)焊机变位机械:包括焊接操作机和电渣焊立架。
(3)焊工变位机械:包括焊工升降机等。
焊接变位机(positioner)是将工件回转、倾斜,使工件上的焊缝置于有利施焊位置的焊件变位机械。
它主要用于机架、机座、法兰、封头等非长形工件的翻转变位和焊接,也可用于装配、切割、检验等。
焊接滚轮架(turning rolls)是借助主动滚轮与工件之间的摩擦力带动筒形工件旋转的焊件变位机械。
它主要用于筒形工件的装配与焊接,是锅炉容器生产中的常用工艺装备。
焊接回转台(welding turntable)是一种简化的变位机,它将工件绕垂直轴回转或者固定某一角度倾斜回转,主要用于回转体工件的焊接、堆焊与切割。
焊接翻转机(welding tilter)是将工件绕水平轴转动或倾斜,使之处于有利装焊位置的焊件变位机。
它主要适用于梁柱、框架、椭圆容器等的焊接。
焊接操作机(manipulator)的作用是将焊机机头准确地送到并保持在待焊位置,或以选定的焊接速度沿规定的轨迹移动焊机机头。
焊接操作机与变位机、滚轮架等配合使用,可完成纵缝、环缝、螺旋缝的焊接,还可以用于自动堆焊、切割、探伤、打磨、喷漆等作业。
1.2 焊接变位机械具有的性能1)焊件变位机械和焊机变位机械要有较宽的调速范围,稳定的焊接运行速度,以及良好的结构刚度。
2)对尺寸和形状各异的焊件,要有一定的适用性。
3)在传动链中,应具有一级反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
4)与焊接机器人和精密焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1~2mm之间,最高精度应可达0.01mm。
焊机技术协议书范本

焊机技术协议书范本甲方(需方):________________________乙方(供方):________________________签订日期:____年____月____日鉴于甲方需要购买焊机设备,并委托乙方提供相应的技术支持和服务,双方本着平等互利的原则,经友好协商,达成如下技术协议:一、产品规格及技术要求1. 乙方应向甲方提供符合以下规格的焊机设备:- 型号:____________________- 功率:____________________- 电压:____________________- 频率:____________________- 效率:____________________- 适用材料:____________________- 其他技术参数:________________2. 乙方保证所提供的焊机设备符合国家相关标准及行业规范。
二、技术支持与服务1. 乙方应提供完整的安装、调试、操作培训等服务。
2. 乙方应确保甲方操作人员能够熟练掌握焊机设备的操作流程。
3. 乙方应提供至少一年的免费技术支持和维护服务。
三、质量保证1. 乙方保证所提供的焊机设备在正常使用和维护条件下,自交付之日起一年内无重大故障。
2. 若设备在保修期内出现故障,乙方应在接到甲方通知后48小时内响应,并提供必要的维修或更换服务。
四、交货与验收1. 乙方应在合同签订后____天内完成设备的交付。
2. 甲方应在设备交付后____天内完成验收,如有异议应在验收后____天内提出。
五、付款方式1. 甲方应在合同签订后____天内支付____%的预付款。
2. 余款应在设备验收合格后____天内一次性支付。
六、违约责任1. 如乙方未能按时交付设备或提供的设备不符合合同约定,应承担相应的违约责任。
2. 如甲方未能按时支付货款,应按逾期金额的____%支付违约金。
七、争议解决双方因履行本协议所发生的任何争议,应首先通过友好协商解决;协商不成时,任何一方均可向甲方所在地人民法院提起诉讼。
[技术方案][技术协议][技术标书]横梁机器人焊接系统方案设计--技术方案说明书-技术标书-技术协议
![[技术方案][技术协议][技术标书]横梁机器人焊接系统方案设计--技术方案说明书-技术标书-技术协议](https://img.taocdn.com/s3/m/0e2a2019f7ec4afe05a1df41.png)
横梁机器人焊接系统技术协议书xxxxxxxxxxx有限公司(买方)与xxxxxxxxx(卖方)就《横梁机器人焊接系统》项目的有关设计/制造/调试等问题,双方本着平等自愿的原则,经友好协商,达成本技术协议。
关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议1 设计依据1.1产品编号名称外形/照片图号1 横梁(示样图)2 右推杆(示样图)注意:1买方需提供详细的工件图纸和规格。
2产品信息。
2.1工件上设备前的状态:焊前已组对完成,使用气体保护焊进行点固焊。
2.2工件被焊部位无毛刺,锈蚀,油污等影响焊接质量的缺陷。
2.3工件材质:碳钢2.4工件重量:<2500kg2.5材料厚度:δ=10~30 mm2.6焊缝间隙:≤2 mm1.2现场环境信息1.2.1电源:3相380V±10%、50Hz±1%、50KVA、单相交流电220V1.2.2压缩空气:0.5Mpa以上1.2.3温度: 0~45℃;相对湿度:≤90%,不结露关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议2系统构成概述2.1系统布局图系统预估尺寸:长11000mm ,宽8000mm ,高2000mm ,挖地沟1000㎜。
注:以上数据仅供参考,实际尺寸以设计尺寸为准。
图一、三维轴测视图关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议 关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议电控制柜双座单回转变位机机器人行走机构单座双回转变位机ABB 机器人电控冷却水箱图二、俯视图图三、侧视图:图四、单座双回转变位机(外部轴电机驱动)筒装焊丝图五、双座单回转变位机(外部轴电机驱动)关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议 关键词:横梁机器人焊接系统方案设计-机器人焊接系统--技术方案说明书-技术标书-技术协议伺服电机加RV 减速机驱动,配置回转支撑,焊接工件时,变位机在0度位置,装夹工件时,变位机在180度位置 从动移动机构,以适应不同长度工件外部轴电机加RV 减速机驱动外部轴电机加RV 减速机驱动 外部轴电机加RV 减速机驱动图六、机器人行走系统TBI清枪器外部轴电机驱动2.2系统构成系统由一套ABB工业机器人系统IRB2400L+IRC5,一套SmarTac寻位系统,一套AWC电弧跟踪系统,一套松下YD-500GL全数字逆变脉冲焊接电源,一套单座双回转外部轴电机驱动的焊接变位机,一套外部轴电机驱动的双座单回转焊接变位机,一套外部轴电机驱动的机器人左右行走机构,一套TBI水冷焊枪,一套波英特冷却循环水箱,一套TBi自动清枪剪丝装置,两套焊接夹具,一套安全防护栏机构,一套电气控制系统构成。
焊接变位器设计指导书
座式焊接变位器设计1.焊接变位机械的分类及应用焊接变位机械是改变焊件、焊机或焊工空间位置来完成机械化、自动化焊接的各种机械设备。
根据焊接变位机械的作用可以分成三大类:1) 焊件变位机械,如焊接变位机、滚轮架、回转台、翻转机;2) 焊机变位机械,焊接操作机;3) 焊工变位机械,焊工升降台。
使用焊接变位机械可缩短焊接辅助时间,提高劳动生产率,减轻工人劳动强度,保证和改善焊接质量,并可充分发挥各种焊接方法的效能。
2.焊接变位机作用焊接变位机是焊件变位机械中的一种,利用它在焊接作业中将焊件回转并倾斜,使焊接上的焊缝置于有利施焊位置,完成手工焊接和自动焊接的作业。
焊接变位机主要用于机架、机座、法兰、封头等非长形焊件的翻转变位。
在手工焊中,焊接变位机可以把工件回转并倾斜,使焊缝处于水平焊或船形焊位置,从而减轻工人劳动强度,保证焊接质量;也可以利用焊接变位机进行自动焊接操作,完成一些圆环焊缝的焊接;另外,可以把焊接变位机与弧焊机器人相结合(柔性加工单元FMC ),完成一些曲面、复杂的焊缝的焊接。
焊接变位机按结构形式可分为三种:1) 伸臂式焊接变位机;2) 座式焊接变位机;3) 双座式焊接变位机。
焊接变位机出三种基本结构形式外,还有很多派生形式,有些变位机的工作台还具有升降功能。
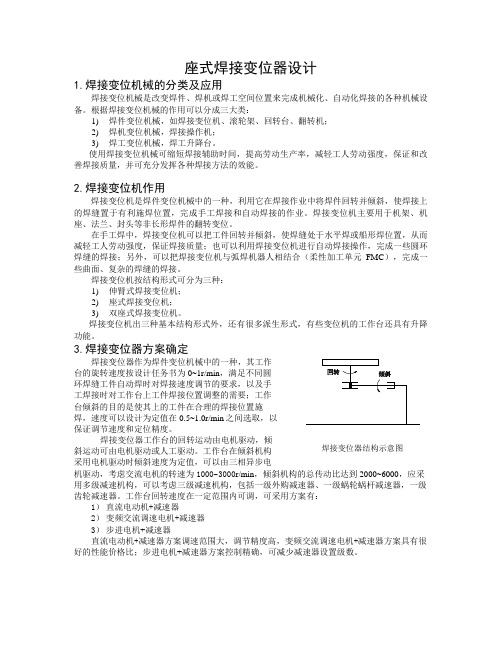
3.焊接变位器方案确定焊接变位器作为焊件变位机械中的一种,其工作台的旋转速度按设计任务书为0~1r/min ,满足不同圆环焊缝工件自动焊时对焊接速度调节的要求,以及手工焊接时对工作台上工件焊接位置调整的需要;工作台倾斜的目的是使其上的工件在合理的焊接位置施焊,速度可以设计为定值在0.5~1.0r/min 之间选取,以保证调节速度和定位精度。
焊接变位器工作台的回转运动由电机驱动,倾斜运动可由电机驱动或人工驱动。
工作台在倾斜机构采用电机驱动时倾斜速度为定值,可以由三相异步电机驱动,考虑交流电机的转速为1000 3000r/min ,倾斜机构的总传动比达到2000~6000,应采用多级减速机构,可以考虑三级减速机构,包括一级外购减速器、一级蜗轮蜗杆减速器,一级齿轮减速器。
焊接变位机操作规程
焊接变位机操作规程一、引言焊接变位机是一种用于焊接过程中工件的转移和定位的设备。
本操作规程旨在指导焊接操作人员正确使用焊接变位机,保证焊接作业的安全性和高效性。
二、设备概述焊接变位机由底座、转台、行走机构、控制系统等组成。
其主要功能是将工件转移至正确的焊接位置,提供稳定的工件支撑。
三、安全操作要求1. 操作人员必须经过专业培训,熟悉焊接变位机的使用方法和操作规程。
2. 操作人员在工作之前必须佩戴个人防护装备,包括安全帽、防护眼镜、防护服等。
3. 在操作过程中,禁止在焊接变位机上临时存放工具、溶剂等杂物。
4. 操作人员应确保周围环境整洁,防止绊倒等意外事故发生。
5. 在操作过程中,严禁将手、脚或其他身体部位放置在转台、行走机构等动作部件下方。
四、操作流程1. 开机准备a. 确保所有电源开关处于关闭状态。
b. 检查焊接变位机的各个部件是否完好,并确保紧固件已经紧固牢固。
c. 检查液压系统的液位,并做相应的补给,确保正常工作。
d. 打开主电源开关,将控制系统启动。
2. 工件定位a. 根据焊接工艺要求,将焊接工件放置在转台上,并根据需要进行固定。
b. 使用转台上的操作面板,将工件转移到需要焊接的位置上,并使其保持水平。
3. 开始焊接a. 确保焊接电源已经连接并正常工作。
b. 根据焊接工艺要求,选择合适的焊接参数,并在控制系统上进行相应设置。
c. 启动焊接电源和焊接变位机,开始进行焊接作业。
d. 在焊接过程中,操作人员应密切关注焊接变位机的运行状态,确保工件稳定。
4. 完成焊接a. 焊接作业完成后,停止焊接电源和焊接变位机的运行。
b. 将焊接变位机调整到安全位置,并关掉电源开关。
c. 清理焊接变位机及工作周围的焊渣、废料等。
五、常见故障处理1. 转台无法正常运转:检查电源连接是否正常,检查转台上的推拉手柄是否处于正常位置,检查转台控制电缆是否松动。
2. 行走机构无法正常运行:检查液压系统的液位是否正常,检查行走机构的供电线路是否有异常。
焊接变位机的使用技巧

焊接变位机的使用技巧
焊接变位机又称焊接变位器,焊接转台,焊接旋转工作台,主要用于圆形、环形工件的旋转、翻转,使工件焊缝置于水平,船形等最佳位置以便施焊。
焊接变位机在实际操作中把工件通过焊接卡盘等夹具把工件固定在工作台面上进行回转和倾斜,使焊缝处于最有利待焊位置,提高焊接质量和生产效率,减轻工人劳动强度。
焊接变位机可在工作台上固定专门的焊接卡盘或其他工装用以装夹工件配合手工焊接使用;本机也可以与焊接操作机配套使用实现自动焊接,广泛应用于焊接、切割、打磨、装配、涂装、检测等工序。
焊接变位机具有结构精密,操作简便,使用灵活等特点,特别适用于各种法兰,钢管,环形,圆形等部件的焊接。
另外,可以根据客户的不同需求,配装薄型卡盘,气动顶紧装置,焊枪调节机构,达到理想的环缝自动焊接状态,快速有效的完成焊接工作。
河北创力。
轻型焊接变位机说明书
SH系列轻型变位机使用说明书济南上弘机电设备有限公司电话:+86-531-68809680 传真:+86-531-88779778一、产品概述SH系列轻型变位机主要用于环形焊缝的焊接。
主要功能是将工件倾斜、回转,使焊缝臵于水平、船形等最佳位臵施焊。
该设备可在工作台上固定卡盘或特定工装用以装夹工件配合手工焊接使用,也可与焊接操作机配套使用实现自动焊接,还可用于切割、打磨、装配、检测等工序。
该系列轻型变位机具有以下特点:◆采用具有恒转矩输出特性的直流伺服电机驱动转台转动,转台运行平稳可靠,焊接速度无级可调,且调速范围大,调节精度高。
◆软起动功能:速度上升时间在0-30秒内可调。
◆配用本公司制做的专用三爪卡盘装夹方便、适用性强,也可换装特殊设计的夹具。
◆夹具与工作台选用简单机械连接方式,定位精度高。
◆采用脚踏开关控制工作台转动,操作方便。
二、技术参数三、设备安装1、检查夹具及附件是否牢固可靠。
2、地脚螺钉孔位臵:3、输入电源:单项交流220V 50/60Hz。
四、设备使用使用之前,确保各个插头连接正确可靠,接地线与大地连接可靠,避免设备损坏。
1、接通电源,将电源开关“POWER”打开后电源指示灯亮。
2、在“FOOT”控制状态下,踩住脚踏开关,工作台转动,松开脚踏开关,工作台停止转动;在“AUTO”控制状态下,机器进入自动控制或时间控制状态。
3、将方向转换开关拨向“→”,工作台顺时针转动;拨向“←”,工作台逆时针转动。
4、旋转速度调节旋钮“SPEED”可以改变工作台转速,顺时针旋转,速度加快;逆时针旋转,速度减慢。
5、时间控制功能:该功能能够实现变位机在预先设定的一个周期内自动运转功能。
具体操作方法如下:接通电源,预先设定一个工作周期(分三种状态,“H”表示“小时”为计数单位,“M”表示“分”为计数单位,“S”表示“秒”为计数单位),开启“POWER”开关,电源指示灯亮,工作台转动一个周期后,自动停止工作;按下控制盒背面的绿色复位开关,再次开启“POWER”开关工作台重复转动一个周期。
基本臂焊接变位机技术参数-精品
基本臂焊接变位机主要技术参数
1.用途
用于基本臂的总体焊接。
2.变位机选型
型式:单回转式焊接变位机。
型号:
3.主要技术参数
3.1.额定承载能力: 32回转自由度:
3.3.回转主轴中心高: 3.
4.回转传动参数:
额定输入功率:
额定输出转数:
额定输出扭矩:
3.5.允许焊接电流:
4.结构简介
1200kgo 360°全回转950mmo
2.2kWo
217min。
3600Nmo
1000A
4.1.回转传动系:蜗轮减速机、链轮传动、回转盘至工装座带动工件旋
转。
从动回转端可根据需要任意调整距离,工装在回转盘内。
42电器控制系统采用移动式手持控制盒。
5.夹具
回转盘采用气动合并,链条做夹具上下、左右可调,可适应各种车型基本臂的焊接。
3吨焊接变位机技术参数表
3吨焊接变位机技术参数表1. 引言焊接变位机是一种用于焊接过程中工件的变位和翻转的设备。
本文将详细介绍3吨焊接变位机的技术参数,包括其结构、功能、性能以及应用范围等方面的内容。
2. 结构和功能2.1 结构3吨焊接变位机主要包括以下组成部分: - 主体结构:由钢材焊接而成,具有足够的强度和刚度,以承受3吨工件的重量。
- 电机系统:采用高性能电机驱动,提供足够的动力和转矩。
- 控制系统:包括电气控制柜、PLC控制器等,用于控制变位机的运行和各种功能。
- 变位装置:用于实现工件的变位和翻转,通常采用液压或气动系统。
2.2 功能3吨焊接变位机具有以下功能: - 工件变位:可以将工件从一个位置移动到另一个位置,方便焊接作业的进行。
- 工件翻转:可以将工件进行翻转,以便于不同角度的焊接。
- 工作台旋转:可以通过旋转工作台实现工件在水平方向上的转动。
- 自动控制:可以通过控制系统实现自动化操作,提高生产效率。
3. 技术参数3.1 承载能力•最大承载能力:3吨•最大工件尺寸:根据实际需求确定3.2 变位速度•工件变位速度:根据实际需求确定•工作台旋转速度:根据实际需求确定3.3 电气参数•电源电压:根据实际需求确定•控制电压:根据实际需求确定3.4 外观尺寸•长度:根据实际需求确定•宽度:根据实际需求确定•高度:根据实际需求确定4. 性能特点4.1 稳定性3吨焊接变位机具有良好的稳定性,能够在高负荷和高速运行时保持稳定的工作状态,确保焊接质量。
4.2 精度3吨焊接变位机具有较高的定位精度和重复定位精度,可满足精密焊接的要求。
4.3 可靠性3吨焊接变位机采用高品质的电气元件和液压元件,具有较高的可靠性和耐用性,能够长时间稳定运行。
5. 应用范围3吨焊接变位机广泛应用于各种焊接作业场景,包括汽车制造、船舶制造、钢结构制造等行业。
其稳定性、精度和可靠性使其成为焊接生产线中不可或缺的设备。
6. 总结本文详细介绍了3吨焊接变位机的技术参数,包括其结构、功能、性能以及应用范围等方面的内容。
焊机技术协议书范本

焊机技术协议书范本甲方(技术提供方):地址:法定代表人:联系电话:乙方(技术接受方):地址:法定代表人:联系电话:鉴于甲方拥有先进的焊机技术,乙方有意向引进并使用该技术,经双方协商一致,特订立本技术协议书。
第一条技术内容及要求1.1 甲方同意向乙方提供以下焊机技术:____________________。
1.2 技术提供的具体内容包括但不限于:技术资料、操作手册、技术指导等。
1.3 技术要求应符合国家相关标准及行业规范。
第二条技术使用范围及期限2.1 乙方有权在以下范围内使用甲方提供的技术:____________________。
2.2 技术使用期限自本协议生效之日起至________年______月______日止。
第三条技术指导与培训3.1 甲方负责向乙方提供必要的技术指导和培训服务。
3.2 培训内容包括:设备操作、故障排除、日常维护等。
3.3 培训的具体时间、地点及方式由双方另行协商确定。
第四条技术成果归属4.1 乙方在使用甲方技术过程中产生的任何技术成果,其知识产权归乙方所有。
4.2 甲方对提供给乙方的技术成果保留其知识产权。
第五条技术保密5.1 双方应对本协议内容及技术资料严格保密,未经对方书面同意,不得向第三方泄露。
5.2 保密期限为自本协议签订之日起至技术不再具有商业价值为止。
第六条费用及支付方式6.1 乙方应向甲方支付技术使用费共计人民币__________元。
6.2 支付方式为:__________(如:一次性支付/分期支付等)。
6.3 具体支付时间及条件由双方另行商定。
第七条违约责任7.1 如一方违反本协议约定,应承担违约责任,并赔偿对方因此遭受的损失。
7.2 违约责任的具体承担方式由双方根据违约情况协商确定。
第八条争议解决8.1 本协议在履行过程中如发生争议,双方应首先通过友好协商解决。
8.2 协商不成时,任何一方均可向甲方所在地人民法院提起诉讼。
第九条协议的变更与解除9.1 本协议的任何变更或补充,须经双方协商一致,并以书面形式确定。
变位机使用说明书
II
变位机使用说明书
目录
目录
前言 .............................................................................................................................................................................I
2 伺服驱动器连接和调试..................................................................................................................................3
2.1 连接方式 .............................................................................................................................................................. 3 2.2 调试方式 .............................................................................................................................................................. 3
1.1 变位机定义 ......................................................................................................................................................... 1 1.2 变位机特点 ......................................................................................................................................................... 1 1.3 变位机应用场景................................................................................................................................................. 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
焊接变位机
技
术
说
明
书
供方:XXXX 公司
需方:XXXX 公司
20XX 年XX 月XX 日
关键词: 焊接变位机技术说明书-技术方案-技术协议-技术标书
关键词: 焊接变位机技术说明书-技术方案-技术协议-技术标书
目录
一、设备内容
二、系统工程技术资料
三、必要的动力电源四、
工程进度打算
五、安装调试
六、培训打算及要求
七、验收
八、质保期
—.下表所列的内容为 XXX 负责供给或制造的设备内容
序号名称规格数量品牌备注1变位机 1
1.1 主动箱〔气动〕200KG 1
1.2 从动箱 1 XXX
1.3 翻转工作台1450X6881
1.4 底座 1
2电控系统 1 XXX
变位机布置示意图
二.工程技术资料
⏹焊接工件要求
⏹材质:碳钢
⏹工件重复定位尺寸精度需能保证焊缝位置误差小于0.5mm。
⏹工件状态:工件圆柱度及工件全都性误差应在0.5mm以内。
⏹外表状态:工件外表无毛刺、无由污、无涂层等外表附着物及其他异物。
〔注:如以上条件不能满足,如焊接节拍、焊接品质等内容应做相应变动〕
缓冲器1
齿条
齿轮.主轴
缓冲器2
气缸
⏹ 气动变位机说明
⏹ 系统底座及变位机箱体、翻转台均由碳钢及型材拼焊接而成,扎实稳定。
⏹ 气动回转方式可实现工件在 0°和 180°两个角度的焊接,气动翻转机构重复定位精度高±0.1°,翻转中心与承载物体的重心
小于 100mm 时, 气动翻转台最大可承载 200 公斤。
⏹ 变位机驱动承受气缸+周密齿轮齿条副+直线导轨, 实现工件正反面焊缝一次焊接完成,提高生产效 降低工人的劳动强度。
〔详见右图〕
⏹ 翻转工作台夹具定位间距承受一个螺纹孔与一个
定位销孔穿插定位的定位方式,可便利夹具的更换及定位的准确。
〔详见以下图〕
工作台定位示意图。