机械基础轮系习题讲解学习
杨可桢《机械设计基础》(第5版)笔记和课后习题(轮系)
图 5-3 解:这是一个定轴轮系,由题意可得:
1 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
反转原理:给周转轮系施以附加的公共角速度 H 后,不改变轮系中各构件之间的相
对运动,原轮系将转化成为一假想的定轴轮系,由此可按定轴轮系的公式计算该新轮系的传
动比。
设周转轮系中两个太阳轮分别为 G、K,行星架为 H,则其转化轮系的传动比:
圣才电子书 十万种考研考证电子书、题库视频学习平台
第5章 轮 系
5.1 复习笔记
一、轮系的类型 轮系是指由一系列齿轮组成的传动系统。 根据轮系运转时各个齿轮轴线相对于机架位置是否固定,分为三类: 1.定轴轮系:轮系中各齿轮轴线相对于机架均为固定,又分为平面定轴轮系和空间定 轴轮系。 2.周转轮系:轮系中至少有一个齿轮轴线位置不固定,而是绕着其他齿轮的固定轴线 回转。周转轮系由太阳轮、行星轮、系杆及机架组成,又可分为差动轮系(自由度为 2)和 行星轮系(自由度为 1)。 3.复合轮系:既包含定轴轮系,又包含周转轮系,或者是由几部分周转轮系组成。 根据轮系中各轮几何轴线在空间的相对位置,分为两类:平面轮系和空间轮系。
图 5-2
5-2 在图 5-3 所示轮系中,已知 z1=15,z2=25, z2' =15,z3=30, z3' =15z4=30, z4' =2(右 旋),z5=60, z5' =20(m=4 mm),若 n1=500 r/min,求齿条 6 线速度 v 的大小和方向。
3 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
(5)空间周转轮系中,由于角速度矢量与系杆的角速度矢量不平行,所以不能用代数 法相加减。但是不影响基本构件之间传动比的计算。
第6章轮系例题精解.
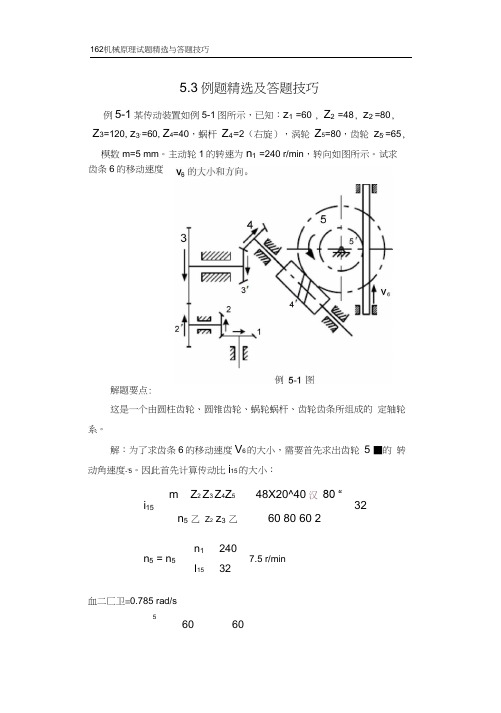
162机械原理试题精选与答题技巧560 605.3例题精选及答题技巧例5-1某传动装置如例5-1图所示,已知:z 1 =60 , Z 2 =48, z 2' =80,Z 3=120, z 3'=60, Z 4=40,蜗杆 Z 4'=2(右旋),涡轮 Z 5=80,齿轮 z 5'=65,模数m=5 mm 。
主动轮1的转速为n 1 =240 r/min ,转向如图所示。
试求解题要点:这是一个由圆柱齿轮、圆锥齿轮、蜗轮蜗杆、齿轮齿条所组成的 定轴轮系。
解:为了求齿条6的移动速度V 6的大小,需要首先求出齿轮 5 ■的 转动角速度-'5。
因此首先计算传动比i 15的大小:m Z 2 Z 3 Z 4Z 5 48X20^40汉 80 “ i 1532n 5 乙 Z 2 z 3 乙60 80 60 2n 1 240 n 5 = n 57.5 r/minI 1532血二匚卫=0.785 rad/s齿条6的移动速度第5章轮系163齿条6的移动速度等于齿轮5的分度圆线速度,即:1 1v6 =r5 5mz5 5 5 65 0.785=127.6 mm/s2 2齿条6的运动方向采用画箭头的方法确定如例5-1图所示。
例5-2如例5-2图所示,已知各轮齿数为Z1、Z2、Z3、Z4、Z、Z6,Z1为主动件,转向如图箭头所示,试求:1. 传动比im - 1 A ■ H二?(列出表达式);2. 若已知各轮齿数Z1= Z2=Z4=Z5=20,Z3=40,Z6=60,求i1H的大小及转向。
解题要点:如例5-2图所示,从结构上看,此轮系由两部分组成,齿轮1、齿轮2、齿轮3组成定轴轮系,齿轮4、5、6及系杆H组成行星轮系,二者之间属串联关系。
齿轮3和齿轮4属同一构件。
解:1.根据上面分析,得到如下方程:14HZ1(1)3■H(2)丄7图5-26I 13Z2 Z3Z1 Z24■H164机械原理试题精选与答题技巧由式⑴与式⑵解得:讣=竺=色1+空灼HZ1 I 乙丿3.将 Z i =Z 4 =20, Z 3=40, Z 6=60 代入式⑶得:40 『60 ) i 1H =— 1 +—丨=820 i 20 丿转向如例5-2图所示。
机械设计基础 第5章 轮系

Z2 H Z1
Z’2
Z3
=99。 z3=99。源自101×99/100× i1H=1-iH13=1-101×99/100×100 =1/10000, iH1=10000 结论:系杆转10000圈时, 结论:系杆转10000圈时,轮1同向转1圈。 10000圈时 同向转1 100, 又若 Z1=100, z2=101, z2’=100, z3=100, =-1/100, i1H=1-iH1H=1-101/100 =-1/100, iH1=-100
所有齿轮几何轴线的位置均固定不 变的轮系,称为定轴轮系。 变的轮系,称为定轴轮系。
§5-1 轮系的类型
二、周转轮系
周转轮系:在运转过程中至少有一个齿轮几何轴线的位置并不固定, 周转轮系:在运转过程中至少有一个齿轮几何轴线的位置并不固定, 而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。 而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。
方向: 方向:见图 复合轮系
Z5
Z’5
§5-4 复合轮系及其传动比
复合轮系:几个基本周转轮系构成, 复合轮系:几个基本周转轮系构成,或定轴轮系与周转轮系构成 整个复合轮系不可能转化为一个定轴轮系,所以正确的做法是: 整个复合轮系不可能转化为一个定轴轮系,所以正确的做法是: 1 区分其中的基本周转轮系和定轴轮系 2 分别计算各轮系的传动比 3 各传动比联合求解
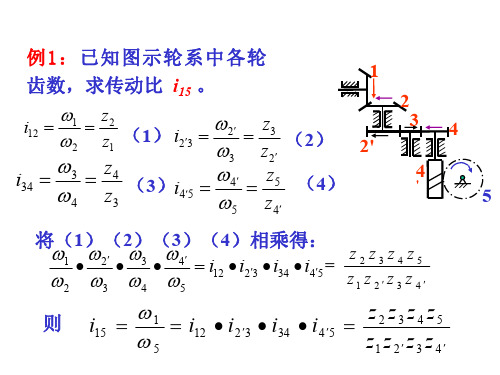
ω1 3 Z2 Z3 Z5 = i12i2′3i34i45 = (− 1) ω5 Z1Z2′ Z3′
§5-2 定轴轮系及其传动比
传动比计算
ω1 (− 1)3 Z2Z3Z4 Z5 i15 = =i i ′ i i = ω5 12 2 3 34 45 Z1Z2′ Z3′ Z4
机械原理-轮系集合例题

第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
机械原理轮系基础讲解共29页文档

15、机会是不守纪律的。——雨果
41、学问是异常珍贵的东西,从任何源泉吸 收都不可耻。——阿卜·日·法拉兹
、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
45、自己的饭量自己知道。——苏联
机械原理轮系基础讲解
11、战争满足了,或曾经满足过人的 好斗的 本能, 但它同 时还满 足了人 对掠夺 ,破坏 以及残 酷的纪 律和专 制力的 欲望。 ——查·埃利奥 特 12、不应把纪律仅仅看成教育的手段 。纪律 是教育 过程的 结果, 首先是 学生集 体表现 在一切 生活领 域—— 生产、 日常生 活、学 校、文 化等领 域中努 力的结 果。— —马卡 连柯(名 言网)
汽车机械基础模块二六单元轮系习题及答案

知识巩固一、填空题1.由一系列相互啮合的齿轮所组成的传动系统称为也系。
2.三星齿轮机构或滑移齿轮机构常用增、减惰轮的方法实现变电的要求。
3.根据轮系中各轮轴线在空间的相对位置是否固定,轮系可分为定轴轮系和周转轮系两类。
4.加惰轮的轮系只能改变_________ 的旋转方向,不能改变轮系的. o二、选择题1.当两轴相距较远,且要求传动准确,应采用A.带传动B.链传动C.蜗杆传动D.齿轮系传动2. 传动比恒定。
A.皮带传动B.链传动C.齿轮传动D.螺旋传动3.轮系中的惰轮常用于改变—oA.轮系的传动比大小B.从动轮的转向C.传动距离D.结构形式三、判断题1.轮系中加惰轮会改变总传动比的大小();又会改变从动轮的旋转方向。
()。
2.轮系和摩擦轮传动一样易于实现无级变速。
()3.至少有一个齿轮的几何轴线绕另一个齿轮旋转的轮系称为定轴轮系。
()4.定轴轮系传动比,等于该轮系的所有从动齿轮齿数连乘积与所有主动齿轮齿数连乘积之比。
()5.轮系可以实现变速和变向要求。
()6.轮系传动既可以用于相距较远两轴间传动,又可以获得较大传动比。
()四、名词解释轮系五、做一做观察一下汽车的变速箱,总结轮系的功用一、填空题1.轮系。
2.变向。
3.定轴轮、周转轮系。
4.从动轮,传动比。
二、选择题1. D2. C3. B三、判断题1. ×2. X3. X4. Y5. 46. Y四、名词解释轮系答:一系列的齿轮组成的传动系统称为轮系五、做一做观察一下汽车的变速箱,总结轮系的功用答:一系列的齿轮组成的传动系统称为轮系 1.实现两轴间远距禽的运动和动力的传动 2.实现变速传动3.实现换向传动4.实现差速作用一、填空题1.轮系中,首末两轮转速之比,称为轮系的使动比。
2.定轴轮系的传动比,等于组成该轮系的所有轮齿数连乘积与所有轮齿数连乘积之比。
二、选择填空1.轮系中,—转速之比称为轮系的传动比。
A.末轮和首轮B.末轮和中间轮C.首轮和末轮D.首轮和中间轮2,轮系传动比的大小与轮系中的惰轮的齿数—。
机械设计基础第5章 轮系习题解答1
50 nH
8
nH
350 33
10.6r / min
转向与n1方向相同。
n1 1 991909100
nH
1010000000
n1 19091909011 1100 1 nH 1100000 1010000000 100
iH 1
1 i1H
10100000
例题5.4:如图所示的轮系中 ,已知若 z1=20, z2=40,
z2’=20, z3=30,z4=80,试求传动比i1H。
解: 将轮系分解
4 13
1-2为定轴轮系 2-2’共轴
2
H
H-4-3-2’为周转轮系
2’
定轴轮系: i12=ω1/ω2 =-z2/ z1
周转轮系: iH2’4=(1- i2’H) =-z4 /z2’
连接条件: ω2=ω2’
i12 • i2’H
联立解得 i1H
1 H
z2 (1 z4 ) 40 (1 20) 10 z1 z2 20
z2=25,z2'=20,z3=75,齿轮1的转速为200r/min(箭头朝
上),齿轮3的转速为50r/min,求行星架转速的nH大小和
方向。
解: i13H
n1H n3 H
n1 nH n3 nH
z2z3 z1 z2
25 75 25 30 20 8
设n1为正,则n3= -50
200 nH 25
“-”表示齿轮1和行星架H的转向相反。
例5.5 :在图所示的电动卷扬机减速器中,已知各轮齿数
为z1=25,z2=50,z2'=20,z3=60,z3'=18,z4=30,z5=54。 试求传动比i1H。又若电动机的转速为n1=1000r/min,求 转筒的转速。
机械原理典型例题(第七章轮系)
- 50 n H
5
n H 8.33r / min
7-12:所示电动三爪自定心卡盘传动轮系中, 设已知齿数为Z1=6,Z2=Z2’=25,Z3=57, Z4=56。试求:传动比i14。 i14=n1/n4
=i1H/i4H
3 2 2' 4
H 1
1-2-3-H, 行星轮系 n1 nH n1 H i13 1 n3 nH nH z2 z3 57 z1 z2 6
7-14:图示锥齿轮组成的差速器。已知Z1=48, Z2=42,Z2’=18,Z3=21,n1=100r/min, n3=80r/min,转向如图所示。求nH=?
2 1 2' H 3
H i13
n1 n H z z 49 2 3 z1 z 2 48 n3 n H
转化轮系中 n1与n3相 反
2’-3-4-H差动轮系 1-2空间定轴轮系 1’-5’-5-4’空间定轴轮系 联动n1=n1’, n2=n2’, n4=n4’,n5=n5’
Z1 + n1 n1 Z2 1 ZZ 1 5 n1 nH Z 5' Z 4'
n2' nH z4 = 1 n4 nH z2'
H i13
n3 nH i n4 nH
H 34
H 31
行星轮 — Z2,Z2’ 联动关系 — n2=n2’ 系杆 — H 中心轮 — 1,3,4 3K-H型周转轮系
n1 nH n 1 1 n3 nH nH z3 = 5 z1
n3 nH z1 1 i = n1 nH z3 5
2
由同轴条件,正确啮合条件
r3 r1 2r2
机械设计基础第5章 轮系习题解答2
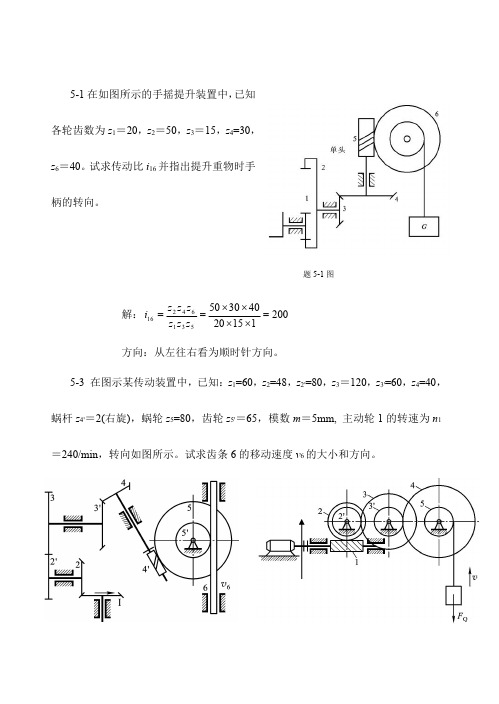
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。
机械设计基础_孙立鹏_习题第五章轮系
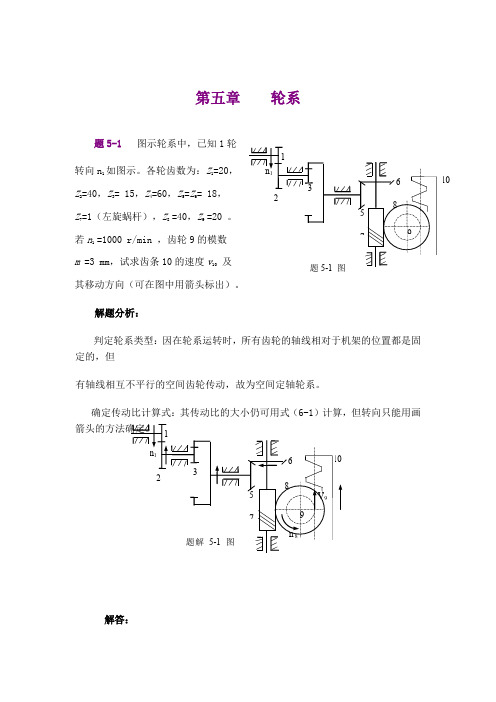
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵ 320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
《机械设计基础》试题库_轮系

第5章 轮系习题与参考答案一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m 有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以运动,也可以运动。
18.采用周转轮系可将两个独立运动为一个运动,或将一个独立的运动成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。
大连理工大学 机械设计基础 作业解答:第5章-轮系
齿轮1、2组成定轴轮系,齿轮3、4、 4’、5和行星架组成周转轮系
定轴轮系
i12
n1 n2
Z2 Z1
Z2 17
周转轮系
i3H5
n3H n5H
n3 nH n5 nH
Z5Z4 Z4'Z3
2419 114 20 23 115
nH
n2 , n3
0,所以 n2 n5 n2
114 115
n1 n3
Z3 Z1
85 17
5,所以n3
n1 5
周转轮系中,i4H7
n4H n7H
n4 nH n7 nH
Z7Z5 Z6Z4
63 24 4 2118
nH
n3, n7
nP
,
所以
n4 nP
n1 / 5 n1 / 5
4, nP
n1
n4 4
(1)当n1
10001r
/ min 、n4
5-2 Z1=15, Z2=25 ,Z2'=15 ,Z3=30,Z3'=15, Z4=30, Z4'=2(右旋),Z5=60,Z5'=20(m=4mm), 若
n1=500(r/min),求齿条6的线速度。
传动4 .Z 3 .Z 2 Z 4' .Z 3' .Z 2' .Z1
的传动比 iSM 和分针与时针的传动比 iMH 。
秒针S到分针M的传动路线为齿轮 6—5—4—3,所以
i SM
Z3.Z5 Z 4 .Z 6
64 60 88
60
分针M到时针H的传动路线为 齿轮9—10—11—12,所以
iMH
Z12 .Z10 Z11.Z9
24 24 68
12
5-4 Z1 = Z2 =17, Z3 =51。当手柄转过90°时,转盘 H 转过 多少角度?
机械原理 轮系习题)
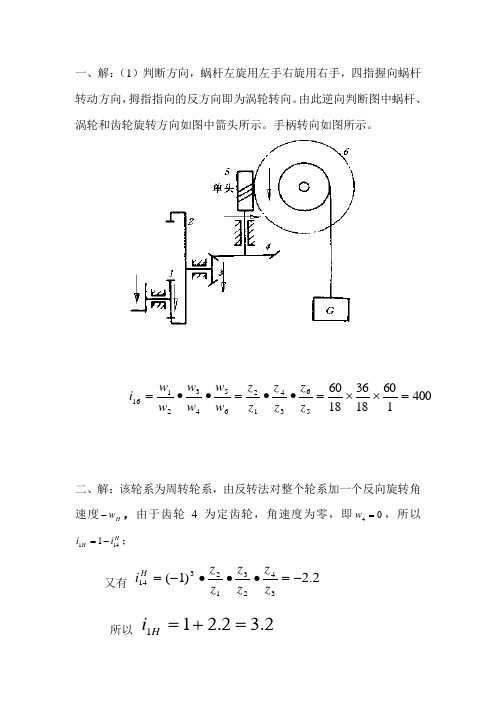
一、解:(1)判断方向,蜗杆左旋用左手右旋用右手,四指握向蜗杆转动方向,拇指指向的反方向即为涡轮转向。
由此逆向判断图中蜗杆、涡轮和齿轮旋转方向如图中箭头所示。
手柄转向如图所示。
4001
601836186056341265432116=⨯⨯=∙∙=∙∙=z z z z z z w w w w w w i
二、解:该轮系为周转轮系,由反转法对整个轮系加一个反向旋转角速度H w -,由于齿轮4为定齿轮,角速度为零,即04=w ,所以
H H i i 14
11-=; 又有 2.2)1(3423123
14-=∙∙∙-=z z z z z z i H
所以 2.32.211=+=H i
三、解:
此轮系中假设轮1的方向向下,则行星轮2、2'和太阳轮4的转向都是向下。
行星轮2、2'和行星架的角速度相同
在左边行星轮系中,131H 13
0z z H H -=--=ωωωω 在右边行星轮系中,'2444'2z z H ==ωωωω ∴4114ωω=i ==+4'21
31z z z z z 25416
四、解:该轮系可以分为两部分,如图中虚线所分的左右两部分,左边为周转轮系,右边为定轴轮系;
分别求出两个轮系的传动比如下:
周转轮系:=H
i 14141556601441===++z z n n n n H H ; 定轴轮系:763530566556====z z n n i ; 两轮系的关系是:45
n n =; 联立方程组求得min 9.741r n ≈; 转向与齿轮6转向相反。
轮系总复习题及解答

第五章 轮系一.考点提要:1.定轴轮系的传动比传动时每个齿轮的几何轴线都是固定的,这种轮系称为定轴轮系。
如果若干个齿轮排成一列,即除第一个主动轮和最后一个从动轮外,其他中间的齿轮即是上一对齿轮的从动轮又是下一对齿轮的主动轮,就称为单式轮系。
如图5.1a) 所示,就是一个单式轮系.单式轮系的传动比为第一个主动轮和最后一个从动轮直接啮合的传动比,与中间齿轮的齿数无关,在计算中都会被约去,这样的齿轮称介轮或惰轮,只对转向起作用。
以图5.1a)的轮系为例:齿轮1、2的传动比和齿轮2,3的传动比分别为:122112z z n n i; 233223z zn n i 齿轮1,3的 传动比为:13231232213113))((z zz z z z n n n n n n i齿轮2是惰轮,惰轮的个数多少只改变转向,惰轮的齿数不改变传动比的值.图5.1 定轴轮系如果在一个轮系中,有的轴上有不止一个齿轮,即动力从同一根轴上的一个齿轮输入,从另一个齿轮上输出,则称之为复式轮系.复式轮系的传动比为组成该轮系的所有单式轮系的传动比之乘积.以图5.1b)的轮系为例:))(('23123'2213'21213z z z z n n n n i i i 以上结论可推广到一般情况。
设轮I 为起始主动轮,轮K 为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式为所有主动轮齿数的乘积到从所有从动轮齿数的乘积到从)(k k n n i n k k 11111(5.1)式中:n 轮系中从轮1到轮k 之间经过外啮合的次数上式所求为传动比数值的大小,当起始主动轮I 和最末从动轮K 的轴线相平行时,两轮转向的同异可用传动比的正负表达。
两轮转向相同(1n 和k n 同号)时,传动比为“+”;两轮转向相反(1n 和k n 异号)时,传动比为“—”。
在两轮的传动中,如果经过偶数次的外啮合,则传动比为正;如果经过奇数次外啮合,则传动比为负.如果在轮系中要求某两个齿轮的传动比,而其间传动要经过圆锥齿轮或蜗轮蜗杆,则两轮转向的异同一般采用画箭头的方法确定。
《机械设计基础》第七章 轮系及减速器

(2) 找出所有的单一周转轮系后余下的就是定轴轮系 (3) 分别列出计算各基本轮系传动比的方程式。 (4) 找出各基本轮系之间的联系。 (5) 将各基本轮系传动比方程式联立求解,即可求得混合轮系的传动比。
例7-5:已知各轮齿数为:z1=20, z2=40, z2 ′=20, z3=30,z4=80, 求传动比i1H。
i12 i23 i34
n1 z 2, n2 z1 z3 n2 , n3 z 2 n3 z4 , n4 z3
z5 n4 i45 , n5 z4
其中n2=n2′,n3=n3′。将以上各式两边连乘可得,
n3 n4 n1n2 3 z2 z3 z4 z5 i12 i23 i34 i45 (1) z3 z4 n2 n3 n4 n5 z1 z2
50 nH 30 80 0 nH 20 50
nH≈14.7r/min
正号表示nH转向和n1的转向相同 本例中行星齿轮2和2′的轴线和齿轮1(或齿轮3)及系杆H的 轴线不平行,所以不能直接利用公式。
§7—4 复合轮系传动比的计算
在计算混合轮系传动比时,既不能将整个轮系作为定轴轮系来处理, 也不能对整个机构采用转化机构的办法。 计算混合轮系传动比的正确方法是: (1) 找出各个单一周转轮系
§5-5 轮系的应用
一、实现分路传动
Ⅳ
二、实现相距较远的两轴之间的传动
三、获得较大传动比 四、实现换向传动 五、用作运动的分解
Ⅲ Ⅴ Ⅵ 主轴
六、在尺寸及重量较小的条件下,实现大功率传动 七、用作运动的合成
图9-20
Ⅱ
杨可桢《机械设计基础》课后习题及详解(轮系)【圣才出品】

5-2 在图 5-3 所示轮系中,已知 z1=15,z2=25, z2' =15,z3=30, z3' =15z4 =30, z4' =2(右旋),z5=60, z5' =20(m=4 mm),若 n1=500 r/min,求齿条 6
1 / 12
圣才电子书
图 5-11
① 齿轮 4、5、6、7、H 构成周转轮系,有
②
又有:nH=n3,nP=n7,联立式①②可得: np
1 4
n1Βιβλιοθήκη n4 ③(1)将已知代入式③,可得 np
1 4
n1
n4
1 1000110000
4
0.25r
/
min
P 和轮 1 的转向相同。
(2) np 0 。
(3)将已知代入式③,可得
,且与
z2 无关。
5-8 在 图 5-9 所 示 锥 齿 轮 组 成 的 行 星 轮 系 中 , 已 知 各 轮 的 齿 数 为
,求 nh 的大小和方向。
图 5-9
解:由题意可得: i1H3
n1H n3H
n1 nH n3 nH
z2 z3 z1z2
,又 n3 0
则有:
5 / 12
圣才电子书
解得:
十万种考研考证电子书、题库视频学习平台
负号表示方向与 n1 相反。
5-9 在图 5-10 所示差动轮系中,已知各轮的齿数
齿轮
1 的转速为 200 r/min(箭头向上),齿轮 3 的转速为 50 r/min(箭头向下),求行星架
转速 nH 的大小和方向。
图 5-10 解:这是一个周转轮系,其中齿轮 1、3 为中心轮,齿轮 2、2′为行星轮,H 为行星架, 则有:
湖南大学机械设计基础轮系习题
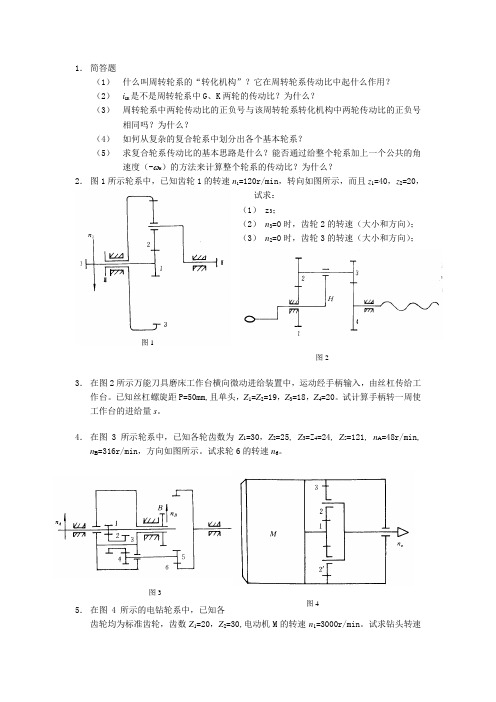
1. 简答题(1) 什么叫周转轮系的“转化机构”?它在周转轮系传动比中起什么作用? (2) i GK 是不是周转轮系中G 、K 两轮的传动比?为什么?(3) 周转轮系中两轮传动比的正负号与该周转轮系转化机构中两轮传动比的正负号相同吗?为什么?(4) 如何从复杂的复合轮系中划分出各个基本轮系?(5) 求复合轮系传动比的基本思路是什么?能否通过给整个轮系加上一个公共的角速度(- H )的方法来计算整个轮系的传动比?为什么?2. 图1所示轮系中,已知齿轮1的转速n 1=120r/min ,转向如图所示,而且z 1=40,z 2=20,试求: (1) z 3;(2) n 3=0时,齿轮2的转速(大小和方向); (3) n 2=0时,齿轮3的转速(大小和方向);3. 在图2所示万能刀具磨床工作台横向微动进给装置中,运动经手柄输入,由丝杠传给工作台。
已知丝杠螺旋距P=50mm,且单头,Z 1=Z 2=19,Z 3=18,Z 4=20。
试计算手柄转一周使工作台的进给量s 。
4. 在图3所示轮系中,已知各轮齿数为Z 1=30,Z 2=25, Z 3=Z 4=24, Z 5=121, n A =48r/min,n B =316r/min ,方向如图所示。
试求轮6的转速n 6。
5. 在图4所示的电钻轮系中,已知各齿轮均为标准齿轮,齿数Z 1=20,Z 2=30,电动机M 的转速n 1=3000r/min 。
试求钻头转速图1图2图3图4图6图7图8n a 的大小及方向。
6. 图5所示轮系中,z 1=20,z 2=30,z 3=z 4=z 5=25,z 6=75,z 7=25,n A =100r/min 。
方向如图所示。
求n B 。
7. 在图6所示轮系中,已知各轮的齿数z 1=z 3=80,z 3=z 5=20,齿数l 的转速n 1=70r/min ,方向如图所示。
试求齿轮5的转速的大小及方向。
8. 图7所示轮系中,已知z 1=24,z 2=26,z 2’=20,z 3=30,z 3’=26,z 4=28。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
定轴轮系的传动比等于各对齿轮传动比的连乘积。
()
周转轮系的传动比等于各对齿轮传动比的连乘积。
()
行星轮系中若系杆为原动件可驱动中心轮,则反之不论什么情况,以中心轮为原动件时也一定可驱动系杆。
()
平面定轴轮系传动比的大小等于( 1 );从动轮的回转方向可用( 1 )方法来确定。
所谓定轴轮系是指①( 1 ),而周转轮系是指②( 1 )
在图示轮系中,已知:蜗杆为单头且右旋,转速n
1
1440
= r/min,转动方向如图
示,其余各轮齿数为:z
2
40
½=,z
2
20
'
=,z
3
30
=,z
3
18
'
=,z
4
54
½=,试:
(1)说明轮系属于何种类型;
(2)计算齿轮4的转速n
4
;
(3)在图中标出齿轮4的转动方向。
在图示轮系中,根据齿轮1的转动方向,在图上标出蜗轮4的转动方向。
1、在图示的轮系中,已知各轮齿数为z z z z z
1235620
=====,已知齿轮1、4、
5、7为同轴线,试求该轮系的传动比i
17。
2、在图示的轮系中,已知z
1
24
=,z
2
18
=,z
3
15
=,z
3
30
'
=,z
4
105
=,当轴转
速n
I =19r/min时,试求轴和轮2的转速n
I I
,n
2。
3、计算图示轮系的传动比i
H
1,并确定输出杆H的转向。
已知各轮齿数z
1
1
=,
z 2
40 =,
z 224
'=,z
3
72
=,z
3
18
'
=,z
4
114
=,蜗杆左旋,n
1
转向如图示。
4、在图示增速器轮系中,设已知各轮齿数为z z z z z z
123456
,,,,,。
试求
传动比i
16。
5、在图示轮系中,已知各轮齿数分别为z
1
1
=(右旋),z z
22
4020
==
,,
'
z
3
18
=,
z 4
20
=, z z n
4561
3020551000
'
,,,
====
z r/min,试求n
B
的大小和方向(方向可
用箭头表示)。
6、轮系如图示,由电动机带动齿轮1,其转速为n
1
1296
= r/min,转向如图示,
z 1
20
=,z z z z z z
234567
242028281762
======
,,,,,,z z
89
280
==
,。
求:1)蜗轮9的每分钟转数;
2)蜗轮9的转向(以箭头表示在题图上);
3〕蜗轮齿的倾斜方向。
7、在图示轮系中,已知z z z z z 125672030=====',,z z z 23440100===,,试求传动比i 17。
8、在图示轮系中,各轮的齿数为:z z 1225==',£ z z z z 23452020100====,,,
n 1180= r/min ,转向如图所示。
试求齿轮4转速n 4的大小和方向。
9、在图示轮系中,已知各齿轮的齿数为:z z z z z z
12347820
======,z
5
30 =,
z 6
60
=,z
9
50
=。
试求传动比i
BA。
10、图示轮系中,齿轮2、3、4、5均为标准直齿圆柱齿轮,且模数相同。
已知
齿数为z
1
1
=(左旋),z z z z
3465
183025
====
,,。
转速
n 1
1440
=r/min,n
5
80
=r/min,其转向如图示。
试计算n
4
的大小和转向。