运动控制系列教程---固高---GTS-400
运动控制系列教程---固高---GTS-400
GTS-400-PV(G)-PCI系列运动控制器以兼容机为主机,提供标准的PCI总线接口产品。运 动控制器提供C语言等函数库和Windows动态链接库。用户将这些控制函数与自己控 制系统所需的数据处理、界面显示、用户接口等应用程序模块集成在一起,搭建复合 特定应用需求的控制系统,以适应各种应用领域的要求。
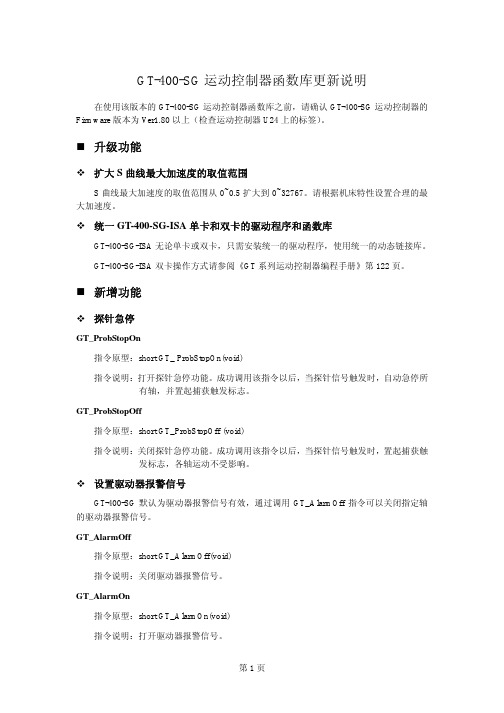
运动控制器面板功能分布
端子板布局
辅助编码器接口
轴信号接口
端子接线,信号 包括轴限位、输 入信号、输出信 号、轴原点信号。
模拟量接口
高速输入输出接口
Hale Waihona Puke NPN漏型控制模式分为脉冲控制和模拟输出控制。 脉冲模式,开环控制模式; 模拟模式,闭环控制模式。
运动控制卡-固高卡硬件
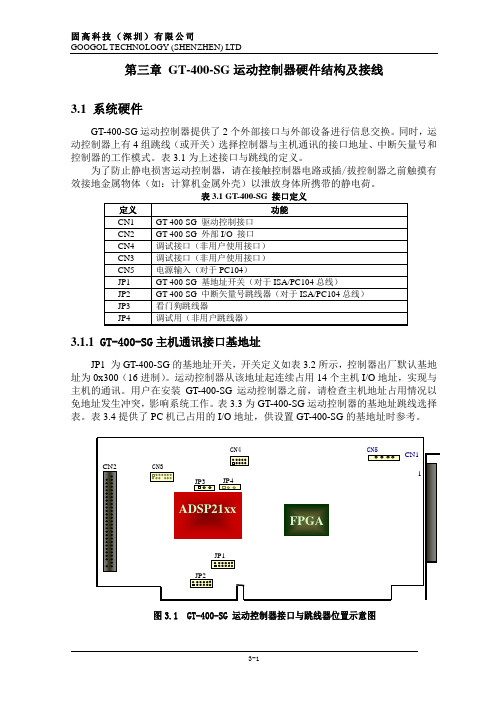
第三章GT-400-SG运动控制器硬件结构及接线3.1 系统硬件GT-400-SG运动控制器提供了2个外部接口与外部设备进行信息交换。
同时,运动控制器上有4组跳线(或开关)选择控制器与主机通讯的接口地址、中断矢量号和控制器的工作模式。
表3.1为上述接口与跳线的定义。
为了防止静电损害运动控制器,请在接触控制器电路或插/拔控制器之前触摸有效接地金属物体(如:计算机金属外壳)以泄放身体所携带的静电荷。
表3.1 GT-400-SG 接口定义3.1.1 GT-400-SG主机通讯接口基地址JP1 为GT-400-SG的基地址开关,开关定义如表3.2所示,控制器出厂默认基地址为0x300(16进制)。
运动控制器从该地址起连续占用14个主机I/O地址,实现与主机的通讯。
用户在安装GT-400-SG运动控制器之前,请检查主机地址占用情况以免地址发生冲突,影响系统工作。
表3.3为GT-400-SG运动控制器的基地址跳线选择表。
表3.4提供了PC机已占用的I/O地址,供设置GT-400-SG的基地址时参考。
图3.1 GT-400-SG 运动控制器接口与跳线器位置示意图表3.2 JP1基地址开关默认定义表3.4 PC 机已占用地址表3.1.2主机中断矢量运动控制器提供时间中断和事件中断信号,供主机使用。
JP2 为GT-400-SG 运动控制器中断矢量跳线器。
跳线器的跳针定义如表3.5所示。
GT-400-SG 设置的默认中断矢量号为IRQ10。
表3.5 主机中断矢量跳线定义3.1.3 其它跳线定义运动控制器提供看门狗实时监视其工作状态。
JP3 为看门狗跳线选择器。
用户通过跳线设置使看门狗有效后,当控制器死机时,看门狗在延时一段时间后自动使控制器复位。
默认设置时,看门狗无效。
JP4为控制器调试跳线选择器,出厂时已设定,用户不得更改跳线。
1 2 3关闭看门狗(默认) 1 2 3JP4(默认):913.2 GT-400-SG 运动控制器接口GT-400-SG运动控制器需与接口端子板等附件配套使用,图3.2是它与这些附件的连接图。
29 固高运动控制器介绍讲解

29 固高运动控制器介绍讲解
29 固高运动控制器介绍讲解
固高运动控制器是一款先进的运动控制系统,用于控制各种运
动设备的运动和位置。
它具有高性能、高可靠性和高精度的特点,
广泛应用于工业自动化、、半导体制造等领域。
主要特点
高性能:固高运动控制器具有快速响应、高速运动和高精度定
位的能力,可以满足各种高要求的运动控制需求。
高可靠性:固高运动控制器采用先进的硬件和软件设计,具有
稳定的运行性能和可靠的故障保护机制,确保系统长时间稳定运行。
丰富的接口:固高运动控制器支持多种通信接口,包括以太网、RS-232、RS-485等,方便用户与其他设备进行数据交换和通信。
灵活的编程方式:固高运动控制器采用简单易用的编程方式,
支持多种编程语言和开发环境,如C/C++、等,方便用户进行自定
义功能的开发和扩展。
应用领域
工业自动化:固高运动控制器可用于控制各种工业自动化设备,如机械臂、输送带、夹具等,实现精确的运动控制和位置定位。
:固高运动控制器可用于控制各类工业,如焊接、装配等,实现复杂的运动轨迹规划和执行。
半导体制造:固高运动控制器可用于控制半导体制造设备,如晶圆切割机、封装机等,精确控制设备的运动和位置,保证生产过程的稳定性和准确性。
固高运动控制器是一款高性能、高可靠性的运动控制系统,广泛应用于工业自动化、和半导体制造等领域。
它具有丰富的接口和灵活的编程方式,可以满足各种复杂的运动控制需求,是现代工业控制系统的重要组成部分。
运动控制系列教程固高GTS
运动控制系列教程固高GTS运动控制是指通过控制电机和运动控制器实现对运动系统的精确控制。
在现代工业生产中,运动控制被广泛应用于机械设备、自动化生产线、机器人等领域。
固高GTS系列是一款高性能的运动控制器,具有可编程性强、易于集成、运动稳定等特点,广泛应用于各种运动控制系统中。
本教程将分为以下几个部分对固高GTS系列的运动控制进行介绍和教学。
一、固高GTS系列概述(200字)-介绍固高GTS系列的基本特点和应用领域。
-说明GTS系列的硬件结构和工作原理。
二、固高GTS系列的安装和配置(200字)-介绍如何正确安装GTS系列运动控制器。
-说明如何进行控制器的基本配置和参数设置。
三、固高GTS系列的运动控制编程(300字)-介绍GTS系列的编程语言和编程环境。
-说明如何使用GTS系列的开发工具进行编程。
-提供一些编程示例和常用函数的说明。
四、固高GTS系列的运动控制实例(300字)-提供一些实际应用案例,展示GTS系列在不同领域中的应用。
-介绍如何利用GTS系列实现不同类型的运动控制,如直线运动、圆弧插补、速度控制等。
五、固高GTS系列的故障排除与维护(200字)-提供故障排除的常见问题和解决方法。
-介绍如何进行系统的维护和保养,以确保系统的稳定运行。
六、固高GTS系列的最新技术(200字)-介绍固高GTS系列的最新技术和应用案例。
-展望GTS系列在未来的发展方向和趋势。
通过以上的教学内容,读者可以了解固高GTS系列运动控制器的基本原理和使用方法,掌握运动控制的基本技能,并能够应用于实际的运动控制系统中。
同时,读者还可以了解到固高GTS系列在不同领域中的应用案例,为未来的运动控制工作提供参考和借鉴。
GTS功能及行业应用介绍
17
可编辑ppt
应用举例5——飞剪
位置同步 速度同步
视频
18
可编辑ppt
FOLLOW运动(电子凸轮)
能够跟随任意轴的规划位置、编码器位置 能够设置跟随方向、启动跟随条件、循环
跟随次数 提供2个电子凸轮数据表,可以在运动状态
下进行切换
19
可编辑ppt
插补运动
支持两个坐标系同时进行插补运动
31
可编辑ppt
初始化配置多样化(与标准卡区别)
配置工具+配置文件
初始化配置指令:GT_CtrlMode()、 GT_StepDir() …………
32
可编辑ppt
位置比较输出功能
通过编码器位置启动高速IO输出 用在半导体加工行业的飞行拍摄功能中 应用案例子——焊线机
绑定机视频
33
可编辑ppt
6
可编辑ppt
案例分析
钻孔机视频
7
可编辑ppt
点位运动
独立设置加速度和减速度 实现非对称加减速
能够设置起跳速度,提高 运动效率
能够设置S曲线加减速, 实现平滑运动
能够在运动状态下更新目 标位置和目标速度
8
可编辑ppt
应用举例1——钻孔机、固晶机、焊线机
非对称梯形曲线升降速 非对称S曲线升降速 自定义升降速 到位误差带标志 可配置IO停止 自动零漂补偿
GTS系列运动控制器功能及应用介绍
固高科技(深圳)有限公司
1
可编辑ppt
GTS系列运动控制器产品列表
GTS系列运动控制器产品列表 GTS-800-PV-PCI GTS-800-PG-PCI GTS-400-PV-PCI GTS-400-PG-PCI
GT400SG函数库更新说明
GT-400-SG运动控制器函数库更新说明在使用该版本的GT-400-SG运动控制器函数库之前,请确认GT-400-SG运动控制器的Firmware版本为Ver1.80以上(检查运动控制器U24上的标签)。
! 升级功能# 扩大S曲线最大加速度的取值范围S曲线最大加速度的取值范围从0~0.5扩大到0~32767。
请根据机床特性设置合理的最大加速度。
# 统一GT-400-SG-ISA单卡和双卡的驱动程序和函数库GT-400-SG-ISA无论单卡或双卡,只需安装统一的驱动程序,使用统一的动态链接库。
GT-400-SG-ISA双卡操作方式请参阅《GT系列运动控制器编程手册》第122页。
! 新增功能# 探针急停GT_ProbStopOn指令原型:short GT_ ProbStopOn(void)指令说明:打开探针急停功能。
成功调用该指令以后,当探针信号触发时,自动急停所有轴,并置起捕获触发标志。
GT_ProbStopOff指令原型:short GT_ProbStopOff (void)指令说明:关闭探针急停功能。
成功调用该指令以后,当探针信号触发时,置起捕获触发标志,各轴运动不受影响。
# 设置驱动器报警信号GT-400-SG默认为驱动器报警信号有效,通过调用GT_AlarmOff指令可以关闭指定轴的驱动器报警信号。
GT_AlarmOff指令原型:short GT_AlarmOff(void)指令说明:关闭驱动器报警信号。
GT_AlarmOn指令原型:short GT_AlarmOn(void)指令说明:打开驱动器报警信号。
# 设置Home捕获触发沿GT-400-SG各轴Home捕获默认为下降沿触发,通过调用GT_HomeSns指令可以将指定轴的Home捕获设置为上升沿触发。
GT_HomeSns指令原型:short GT_HomeSns(unsigned short sense)指令说明:设置各轴Home捕获的触发沿。
29 固高运动控制器介绍讲解
29 固高运动控制器介绍讲解
29 固高运动控制器介绍讲解
固高运动控制器是一款先进的运动控制系统,用于控制各种运
动设备的运动和位置。
它具有高性能、高可靠性和高精度的特点,
广泛应用于工业自动化、、半导体制造等领域。
主要特点
高性能:固高运动控制器具有快速响应、高速运动和高精度定
位的能力,可以满足各种高要求的运动控制需求。
高可靠性:固高运动控制器采用先进的硬件和软件设计,具有
稳定的运行性能和可靠的故障保护机制,确保系统长时间稳定运行。
丰富的接口:固高运动控制器支持多种通信接口,包括以太网、RS-232、RS-485等,方便用户与其他设备进行数据交换和通信。
灵活的编程方式:固高运动控制器采用简单易用的编程方式,
支持多种编程语言和开发环境,如C/C++、等,方便用户进行自定
义功能的开发和扩展。
应用领域
工业自动化:固高运动控制器可用于控制各种工业自动化设备,如机械臂、输送带、夹具等,实现精确的运动控制和位置定位。
:固高运动控制器可用于控制各类工业,如焊接、装配等,实现复杂的运动轨迹规划和执行。
半导体制造:固高运动控制器可用于控制半导体制造设备,如晶圆切割机、封装机等,精确控制设备的运动和位置,保证生产过程的稳定性和准确性。
固高运动控制器是一款高性能、高可靠性的运动控制系统,广泛应用于工业自动化、和半导体制造等领域。
它具有丰富的接口和灵活的编程方式,可以满足各种复杂的运动控制需求,是现代工业控制系统的重要组成部分。
【设计】基于labview和固高运动控制卡的PID半闭环位置控制
丽水学院【关键字】设计毕业设计(论文)(2017届)基于运动控制卡的位置闭环PID控制题目系统设计院别工学院指导教师张文辉职称副教授班级机自132班姓名王宽学号2017年4月28日基于运动控制卡的位置闭环PID控制系统设计专业:机械设计制造及其自动化班级:机自132 姓名:王宽指导老师:张文辉摘要随着机电一体化技术的不断发展,制造业对自动化设备的位置精度要求越来越高。
由于机械传动误差、干扰等问题的存在,保守的开环控制在很多场合已经很难满足生产生活的精度要求,因此开发高精度的闭环运动控制器具有非常重要的实用价值和运用前景。
运动控制卡作为上位机的计算机技术日益成熟,功能强大,性能稳定,而且可靠性越来越高。
Labview作为上位机开发程序,编程方便、简洁,而且适用于调用运动控制卡的动态链接库文件去实现编程的可行性。
因此本文全面了解运动控制卡的程序调用方法及其用Labview作为开发语言的用法,使用步进电机驱动系统结合PID算法,实现步进半闭环位置控制的程序编写,并取得了一定效果。
关键词运动控制卡动态链接库Labview 位置PID控制Closed-loop PID control position system design based on motion control cardProfession: Mechanical engineering and automation Class: Machine from 132 Name: Wang Kuan Instructor:Zhang WenhuiAbstract With the development of electromechanical integration technology, the manufactu ring industry is demanding higher and higher precision of automation equipment. Due to m echanical transmission error, interference problems such as the existence of the traditional o pen loop control on many occasions is hard to meet the requirements of the precision of t he production and living, so development high precision closed loop motion controller has very important practical value and application prospect.The computer technology of the motor control card is becoming more and more matur e, the function is strong, the performance is stable, and the reliability is higher and higher. Labview is a programming convenience, simplicity, and application to the dynamic link li brary file that calls the movement control card to implement the feasibility of programmin g. So in this paper, a comprehensive understanding of the movement control card’s program calls the use of the method and its use Lanview as development language, the use of s tepping motor driven system combined with PID algorithm, implementation step and a halfclosed loop position control programming, and obtained the certain effect. Keywords The motion control Dynamic Link Library Labview PID control目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题背景及意义 (1)1.2 控制系统概述 (1)1.3研究内容 (2)第2章步进电机闭环系统设计 (3)2.1 引言 (3)2.2 电机与驱动器选型 (3)2.2.1 硬件设备的组成 (3)2.2.2 步进电机系统介绍 (4)2.3 运动控制卡选型 (5)2.4 其它元器件选型 (7)2.3.1 限位开关的使用说明 (7)2.3.2 编码器的使用说明 (8)2.5 小结 (8)第3章位置闭环PID控制系统设计 (10)3.1 引言 (10)3.2 Labview 的介绍 (10)3.2.1 动态链接库的调用 (10)3.2.2 调用库函数节点技术 (12)3.3 闭环PID控制系统设计 (14)3.3.1 板卡初始化设计 (14)3.3.2 开启轴并设置好闭环模式 (16)3.3.3 设置运动参数使其规划运动 (16)3.3.4 PID位置调节 (17)3.4 小结 (18)总结 (20)致谢 (21)参考文献 (22)第1章绪论1.1课题背景及意义在当今这个技术与科技飞速发展的时代,运动控制技术及系统的普及和应用在它本有的进步发展道路上,也带动了其他更多产业的发展,并且与微电子技术、传感器技术、计算机技术等技术的发展和科技的进步共同相互协助发展。
运动控制系列教程---固高---gts-00
FPGA,field-programmable gate array,现场可编程门阵列,在PAL/GAL/CPLC可编程器件基 础上发展的产物。
PCI,计算机内局部总线标准,最多可扩展10个插卡。由INTEL公司在1991年推出。
基础能力要求: 1、C语言 2、Wondows 下动态链接库
GTS-400-PV(G)-PCI系列运动控制器以兼容机为主机,提供标准的PCI总线接口产品。运 动控制器提供C语言等函数库和Windows动态链接库。用户将这些控制函数与自己控 制系统所需的数据处理、界面显示、用户接口等应用程序模块集成在一起,搭建复合 特定应用需求的控制系统,以适应各种应用领域的要求。
运动控制器面板功能分布
端子板布局
轴信号接口
模拟量接口 高速输入输出接口
辅助编码器接口
端子接线,信号 包括轴限位、输 入信号、输出信 号、轴原点信号。
NPN漏型
控制模式分为脉冲控制和模拟输出控制。 脉冲模式,开
固高运动控制技术基础模板
固高科技有限公司运动控制技术系列讲座
直流伺服电机工作原理
• 通电线圈与磁场的相互作用产生了伺服电机的转矩
固高科技有限公司运动控制技术系列讲座
直流伺服电机工作原理(续1)
加于直流电机的直流电源,借助于换向器和电刷的作用, 使直流电机电枢线圈流过的电流,方向是交变的,从而使 电枢产生的电磁转矩的方向恒定不变,确保直流电动朝确 定的方向连续旋转。
固高科技有限公司运动控制技术系列讲座
步进电机的工作原理
步进电机是一种将数字式电脉冲信号转换 为角位移的机电执行元件。
单极与双极连线模式
单极模式
双极模式
固高科技有限公司运动控制技术系列讲座
步进电机的工作原理(续1)
当步进电机的一相绕组 (A相)通电时,产生力 矩使电机转动至位置P(通 常叫一个步距角),当另 一相(B相)绕组通电时, 电机转动至Q点
霍尔传感器
将3个霍尔传感器装再定子上,各相差120度(不是空间 角度)均布在电机一端。
H1 H2 H3 States 101
2018/10/11
100 110 010 011 001
31
固高科技有限公司运动控制技术系列讲座
如何放置霍尔传感器?
假设转矩曲线为梯形曲线
Torque Current H1 H2 H3
固高科技有限公司运动控制技术系列讲座
步进电机的工作原理(续2)
当A相绕组反相通电 时,电机转到R点, 当B相绕组反相通电 时,电机转动至S点
Torque
IA 1 0 -1 0 1 IB 0 1 0 -1 0
Angle
Torque IA = 1 IB = 1 IA = -1
P
GTS-400-PV(G)-PCI系列运动控制器用户手册

2.3.3 步骤 3:建立主机和运动控制器的通讯 ..............................................................6
2.3.4 步骤 4:连接电机和驱动器..................................................................................6
1.3
GTS-400-PV(G)-PCI 系列运动控制器功能列表....................................................1
1.4
电机控制系统的基本组成 ....................................................................................... 2
附录 C 故障处理...........................................................................................................................36
第一章 概述
第一章 概述
1.1 简介
Байду номын сангаас
第三章
系统调试................................................................................................................. 16
附录 A 技术参数...........................................................................................................................17
固高运动控制技术基础PPT课件

(B相)绕组通电时,电机 转动至Q点
Torque
IA = 1
IB = 1
P Q Angle
Figure : Rotation in a stepper motor is generated by alternately energizing and de-energizing the poles in the motor’s stator creating torque which turns the rotor.
1
0
0
IA = 1 IB = 1
0
1 1.8
-1
0 3.6
0
-1 5.4
0
1.8
3.6 5.4 Position
1
0 7.2
固高科技有限公司运动控制技术系列讲座
步进电机的工作原理(续3)
单极整步运行图
双极整步运行图
固高科技有限公司运动控制技术系列讲座
步进电机的工作原理(续4)
半步运行模式:
固高科技有限公司运动控制技术系列讲座
运动控制系统的典型构成(续3)
应用程序指令
运动指令
反馈元件 传动机构
上位计算机
运动控制器
驱动器
电机
负载
位置反馈
速度反馈
闭环控制系统(Close Loop)
电机:直流伺服电机、交流伺服电机 驱动器:速度反馈控制,电流放大 运动控制器:运动规划,速度指令,位置反馈取自负载 上位计算机:运动代码生成,应用程序,人机界面
运动控制系统的典型构成(续1)
应用程序指令
运动指令
反馈元件 传动机构
上位计算机
固高控制器的全闭环应用讲解

方案1
至此,调试流程完毕,把测好的PID参数保存好,程序初始化设置一次即可
方案1
使用常见问题: 1 模拟量闭环控制跟脉冲控制是否可以同时存在?比如1轴用闭环,2轴是开环 脉冲控制。
可以同时存在,只需要做好每个轴的配置即可,控制器资源是不冲突的
人机界 面
光栅检测 位置控制
实际位置反馈
控制器
驱动器
—--
实际速度反馈
速度检测
电机 电机
机械传动机构
Thanks.
rpm/V,假如最高 转速3000的电机, 模拟量电压的输 入范围为-10到10, 所以设置为300即 可
方案1
调试速度环参数: 速度环比例增益: Proportional Gain, 从小到大慢慢增加 建议0.5开始增加, 提高曲线的响应
速度环积分增益: Integral Gain,慢慢 调整直到曲线的稳 态误差很小,规划 曲线跟实际速度曲 线重合
方案1
profile:激活选中
di:激活 输入反转:不要更改默认配置
方案1
3 配置文件写入控制器
4 设置PID参数
测试使用只设置比例增益电机即可运行,开始 可以设置为3 然后更新即可设置完毕,其余参 数使用默认值
5 打开轴状态,点击“伺服使能”,配置正常驱动 电机正常上使能,设置错误电机飞车。如果飞 车更改配置文件中的编码器反向取反即可,再 次使能,直到正常
基于固高控制器的全闭环应用
郭建东 2019.9.12
方案1
硬件:带模拟量输出型控制器+GTHD驱动器(任意支持模拟量控制驱动即可)
例如:GTS-400-PV-VB-PCI 控制卡、GUC-400-PV-HD-M23 注意:GUS控制器不支持模拟量控制
固高运动控制技术基础
XCH 高考复习之现代文阅读
运动控制系统的典型构成
应尘用灰程序教指学令课件 运动指令
传动机构
上位计算机
运动控制器
驱动器
电机
负载
• 开环控制系统(Open Loop
– 电机:步进电机 – 驱动器:脉冲分配,电流放大 – 运动控制器:运动规划,位置脉冲指令 – 上位计算机:运动代码生成,应用程序,人机界面
XCH 高考复习之现代文阅读
电机控制基本知识
尘灰 教学课件
• 常见的控制电机
– 步进电机
• 永磁式:两相(7.5度) • 反应式:三相(1.5度) • 混合式:两相(1.8度)或五相(0.72度)
– 伺服电机
• 直流伺服电机 • 交流伺服电机 • 直线电机
© 2008 DUST Manufacture © 2008 尘灰 制造
– 驱动器:电流放大,位置反馈控制
– 运动控制器:运动规划,位置脉冲指令
– 上位计算机:运动代码生成,应用程序,人机界
面
© 2008 DUST Manufacture
© 2008 尘灰 制造
XCH 高考复习之现代文阅读
运动控制系统的典型构成(续2)
应用尘程灰序指教令学课件 运动指令
反馈元件 传动机构
© 2008 DUST Manufacture © 2008 尘灰 制造
XCH 高考复习之现代文阅读
闭环控制的几种形式
尘灰 教学课件
© 2008 DUST Manufacture © 2008 尘灰 制造
XCH 高考复习之现代文阅读
运动控制系统的构成部件
• 上位计尘算灰机教:学课PC件机 • 运动控制器
固高运动控制器选型指南
深圳销售部地址:深圳市南山区高新技术产业园南区深港产学研基地大楼西座二楼W211室电话:0755-2697 0824 2673 7236传真:0755-2697 0821邮编:518057E-mail: googolhn@上海分公司地址:上海市闵行区莲花路1733号华纳风格酒店503室电话:021-5422 1612 021-5422 1606传真:021-5422 1612邮编:201103E-mail: googolsh@北京分公司地址:北京市海淀区学院南路68号吉安大厦A 座4016室电话:010-6213 6689 6216 2544 6213 6626传真:010-6213 6626邮编:100081E-mail: googolbj@西北办事处地址:陕西省西安市电子二路72A 号21006室电话:029-********、139********传真:029-********邮编:710061E-mail: googolxa@武汉办事处地址:武汉市东湖开发区关山大道218号保利花园D-1105电话:027-8780 6113传真:027-8742 1520邮编:430074E-mail: googolwh@成都办事处地址:成都市文德路58号宝泰家园5-3-27-3电话:028-8325 4020传真:028-8325 4020邮编:610051E-mail: googolcd@济南办事处地址:山东省济南市槐荫区发祥项1号楼1411室电话:0531-8718 0860 186********传真:0531-8718 0860邮编:250016E-mail: zhou.xs@西南地区总代理广西南宁精微环保节能科技有限公司地址:广西南宁市民族大道92-1号新城国际1705室电话:0771-226 4522 2264533 159********传真:0771-226 4522邮编:530022E-mail: sdszph@固高科技(香港)有限公司地址:香港九龙观塘伟业街108号丝宝国际大厦10楼1008-09室电话: + (852)-2358 1033传真: + (852)-2719 8399/E-mail:sales@固高科技(深圳)有限公司地址:深圳市南山区高新技术产业园南区深港产学研基地大楼 西座二楼W211室电话:0755-2697 0817 2697 0824传真:0755-2697 0821邮编:518057http: ///E-mail: googol@CONTENTS目录运动控制技术简介插卡式运动控制器◇ 型号定义说明◇ GE 系列多轴点位运动控制器◇ GE 系列多轴连续轨迹运动控制器◇ GT 系列多轴运动控制器◇ GTS 系列多轴运动控制器◇ GO 系列运动控制器◇ GE 系列四轴激光运动控制器◇ GT 系列激光(振镜)切割标刻运动控制器◇ GH 系列多轴运动控制器◇GN 系列网络式运动控制器一体化运动控制器◇ GUC-E 系列四轴一体化运动控制器(L2)◇ GUC-E 系列四轴一体化运动控制器(L3)◇ GUC 系列四轴一体化连续轨迹运动控制器(L2-LR)◇ GUC 系列四轴一体化点位运动控制器(L2-LR)◇ GUC-T 系列多轴一体化运动控制器◇ GUC-T 系列多轴一体化运动控制器 (高性能型)◇ GUC-H 系列多轴一体化运动控制器◇ GUC 系列四轴激光切割雕刻一体化运动控制器◇GUC-400-TN1-M0X 系列网络式运动控制器嵌入式运动控制器◇GV 系列多轴运动控制器人机界面IO 扩展模块编码器信号驱动及多路分配板电缆◇ 端子板与部分品牌驱动器连接电缆◇其它连接电缆典型应用资质证书122357911131517192121232527293133353739394143454746474849固高科技(香港)有限公司成立于1999年,总部位于香港科技大学。
通用型运动控制器GT-400-SX、GT-400-SV
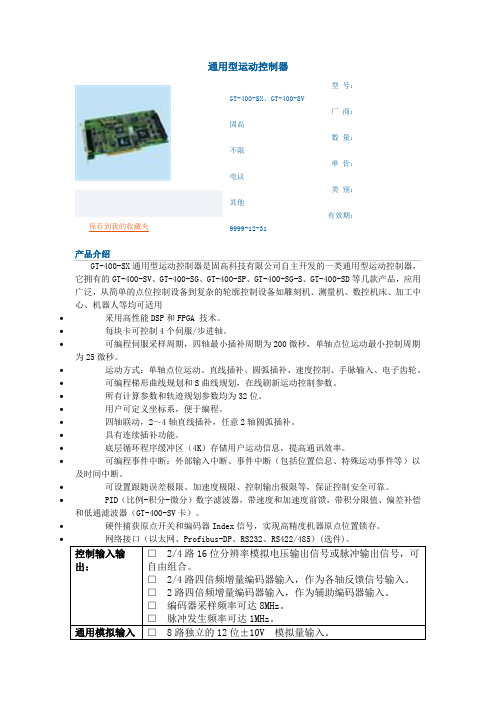
通用型运动控制器∙∙保存到我的收藏夹型号:GT-400-SX、GT-400-SV厂商:固高数量:不限单价:电议类别:其他有效期:9999-12-31产品介绍GT-400-SX通用型运动控制器是固高科技有限公司自主开发的一类通用型运动控制器,它拥有的GT-400-SV、GT-400-SG、GT-400-SP、GT-400-SG-S、GT-400-SD等几款产品,应用广泛,从简单的点位控制设备到复杂的轮廓控制设备如雕刻机、测量机、数控机床、加工中心、机器人等均可适用∙采用高性能DSP和FPGA 技术。
∙每块卡可控制4个伺服/步进轴。
∙可编程伺服采样周期,四轴最小插补周期为200微秒,单轴点位运动最小控制周期为25微秒。
∙运动方式:单轴点位运动、直线插补、圆弧插补、速度控制、手脉输入、电子齿轮。
∙可编程梯形曲线规划和S曲线规划,在线刷新运动控制参数。
∙所有计算参数和轨迹规划参数均为32位。
∙用户可定义坐标系,便于编程。
∙四轴联动,2~4轴直线插补,任意2轴圆弧插补。
∙具有连续插补功能。
∙底层循环程序缓冲区(4K)存储用户运动信息,提高通讯效率。
∙可编程事件中断:外部输入中断、事件中断(包括位置信息、特殊运动事件等)以及时间中断。
∙可设置跟随误差极限、加速度极限、控制输出极限等,保证控制安全可靠。
∙PID(比例-积分-微分)数字滤波器,带速度和加速度前馈,带积分限值、偏差补偿和低通滤波器(GT-400-SV卡)。
∙硬件捕获原点开关和编码器Index信号,实现高精度机器原点位置锁存。
∙网络接口(以太网、Profibus-DP、RS232、RS422/485)(选件)。
控制输入输出:□ 2/4路16位分辨率模拟电压输出信号或脉冲输出信号,可自由组合。
□ 2/4路四倍频增量编码器输入,作为各轴反馈信号输入。
□ 2路四倍频增量编码器输入,作为辅助编码器输入。
□编码器采样频率可达8MHz。
□脉冲发生频率可达1MHz。
基于固高控制器的码垛机器人控制系统设计
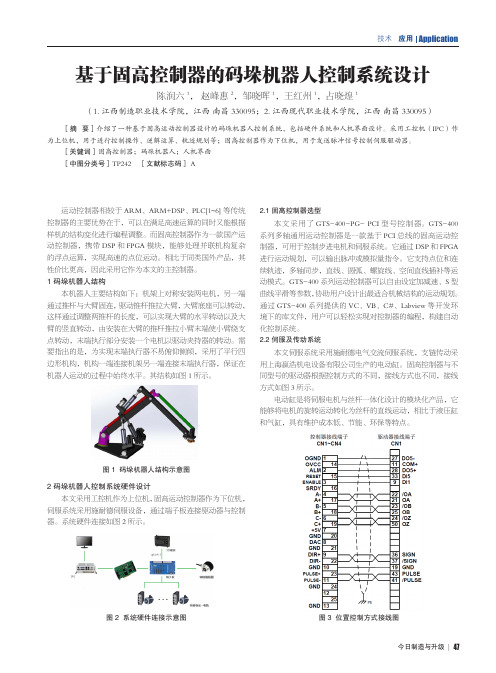
技术 应用 Application今日制造与升级 │ 47基于固高控制器的码垛机器人控制系统设计陈润六1, 赵峰惠2,邹晓晖1,王红州1,占晓煌1(1.江西制造职业技术学院,江西 南昌 330095;2.江西现代职业技术学院,江西 南昌 330095)[摘 要]介绍了一种基于固高运动控制器设计的码垛机器人控制系统,包括硬件系统和人机界面设计。
采用工控机(IPC)作为上位机,用于进行控制操作、逆解运算、轨迹规划等;固高控制器作为下位机,用于发送脉冲信号控制伺服驱动器。
[关键词]固高控制器;码垛机器人;人机界面 [中图分类号]TP242 [文献标志码] A运动控制器相较于ARM、ARM+DSP、PLC[1~6]等传统控制器的主要优势在于,可以在满足高速运算的同时又能根据样机的结构变化进行编程调整。
而固高控制器作为一款国产运动控制器,携带DSP 和FPGA 模块,能够处理并联机构复杂的浮点运算,实现高速的点位运动。
相比于同类国外产品,其性价比更高,因此采用它作为本文的主控制器。
1 码垛机器人结构本机器人主要结构如下:机架上对称安装两电机,另一端通过推杆与大臂固连,驱动推杆推拉大臂,大臂底座可以转动,这样通过调整两推杆的长度,可以实现大臂的水平转动以及大臂的竖直转动,由安装在大臂的推杆推拉小臂末端使小臂绕支点转动,末端执行部分安装一个电机以驱动夹持器的转动。
需要指出的是,为实现末端执行器不易俯仰侧倾,采用了平行四边形机构,机构一端连接机架另一端连接末端执行器,保证在机器人运动的过程中始终水平。
其结构如图1所示。
2.1 固高控制器选型本文采用了GTS-400-PG- PCI 型号控制器。
GTS-400系列多轴通用运动控制器是一款基于PCI 总线的固高运动控制器,可用于控制步进电机和伺服系统。
它通过DSP 和FPGA 进行运动规划,可以输出脉冲或模拟量指令。
它支持点位和连续轨迹,多轴同步,直线、圆弧、螺旋线、空间直线插补等运动模式。
四轴运动控制开发平台

四轴运动控制开发平台概述:GMD系列四轴运动控制开发平台是固高针对运动控制技术应用研究而专门设计和开发的。
根据电机类型,可组合为交流伺服型,直流伺服型,步进型,伺服步进混合型及交直流伺服混合型等五种形式。
该平台可快速构建多至四轴的各种运动控制设备的实验样机,既满足各类运动控制系统的开发和测试要求,又可用于研究开放式运动控制技术、数控技术,也可用作运动控制技术应用软件开发的硬件平台,是机电传动控制、运动控制技术、数控技术及相关专业领域理想的研究开发平台和教学实验设备。
系统特点:●集成化设计,结构紧凑,使用安全。
各轴电机的相对运动可从配有刻度盘的电机轴端直观反映;●多至32路的通用输入输出信号,各轴专用输入输出信号可模拟运动控制系统的各种I/O信号;●输出信号通过前面板指示灯显示,输入信号通过拨动开关或按钮模拟,操作便捷;●8路独立的模拟输入信号接口,2路辅助编码器输入接口;●开放式体系构建,控制系统采用高性能运动控制卡和Windows操作系统,用户可根据研究需要,选择执行元件,组态各种类型的运动控制系统,进行相关研究开发工作;●配合专用软件,还可演示运动控制器的大量运动特性,在集成环境下实现对不同维度虚拟运动控制对象的实际控制;参考实验内容:可开始的基础实验运动控制器基础实验电机与驱动(执行)装置实验直流电机实验(速度环阶跃法辨识实验,位置环PID调整实验)单轴电机运动控制实验二维插补原理及实现实验数控代码编程实验可进行的部分研究工作开放式运动控制技术研究多轴复杂插补算法研究多轴同步控制技术研究运动控制应用软件开发数控系统软PLC技术研究控制软件及其界面:固高运动控制实验软件主要技术参数:项目指标结构形式带滚轮机架交流伺服 10000运动精度(脉冲当量/转)直流伺服 1600步进电机 720控制轴数 4 每轴模拟专用输入信号(光电隔离) 正负限位、原点、伺服报警等每轴模拟专用输出信号(光电隔离) 驱动使能、驱动复位通用模拟数字I/O(光电隔离) 16/16外形尺寸500mm⨯400mm⨯1200mm定购指南GMD4001 四轴交流伺服运动控制开发平台 AMD‐MB‐4001 交流伺服运动开发平台本体GT‐400‐SV‐PCI‐EDU GT‐400‐SV型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)GMD4002 四轴直流伺服运动控制开发平台 AMD‐MB‐4002 直流伺服运动开发平台本体GT‐400‐SV‐PCI‐EDU GT‐400‐SV型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)GMD4003 四轴步进运动控制开发平台 AMD‐MB‐4003 步进运动开发平台本体GT‐400‐SG‐PCI‐EDU GT‐400‐SG型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)GMD4004D 四轴步进直流伺服混合型运动控制开发平台AMD‐MB‐4004‐D 步进直流伺服混合型运动开发平台本体GT‐400‐SV‐PCI‐EDU GT‐400‐SV型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)GMD4004A 四轴步进交流伺服混合型运动控制开发平台AMD‐MB‐4004‐A 步进交流伺服混合型运动开发平台本体GT‐400‐SV‐PCI‐EDU GT‐400‐SV型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)GMD4005 四轴交直流伺服混合型运动控制开发平台AMD‐MB‐4005 交直流伺服混合型运动开发平台本体GT‐400‐SV‐PCI‐EDU GT‐400‐SV型运动控制器S‐UP‐VC‐MC 固高运动控制平台软件(含源代码)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动控制器面板功能分布
端子板布局
辅助编码器接口
轴信号接口
端子接线,信号 包括轴限位、输 入信号、输出信 号、轴原点信号。
模拟量接口
高速输入输出接口
NPN漏型
控制模式分为脉冲控制和模拟输出控制。 脉冲模式,开环控制模式; 模拟模式,闭环控制模式。
GTS-400-PV(G)-PCI系列运动控制器以兼容机为主机,提供标准的PCI总线接口产品。运 动控制器提供C语言等函数库和Windows动态链接库。用户将这些控制函数与自己控 制系统所需的数据处理、界面显示、用户口等应用程序模块集成在一起,搭建复合 特定应用需求的控制系统,以适应各种应用领域的要求。