adams约束介绍学习资料
章4节ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
6 加载固定副
XMUT
用于将构件安装在其它构件或者地面上
① 选择固定副按钮
② 有三种加载方法:1loc、2bod-1loc、2bod-2loc
③ 选择要固定的构件组合
2020年5月16日星期六
第2章 ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
3、通过将模拟仿真结果与物理样机理论数据对照比较来 验证所设计的方案;
2020年5月16日星期六
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
1 打开约束工具包
右键单击运动副工具包
左键单击右下角的按钮
会弹出约束工具包
主要包括:Joints铰链(运动副)、Joint Primitive原始运动副(基本)、运动生成 器、高副约束、一般约束等
第2章 ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
8 加载平移副,可以产生直线运动
XMUT
① 首先建立任意构件
② 左键单击平移副按钮
③ 有三种加载方法:1loc、2bod-1loc、2bod-2loc
④ 选择组成平移副的构件ADAMS约束力运动
2020年5月16日星期六
第2章 ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
2 加载各种运动副
XMUT
现在已经可以熟练加铰链副,现在加载其它运动副。
圆柱副:顾名思义,只能加载到圆柱体和圆孔之间的配合
① 首先建立一个带孔的构件
② 再建立一个圆柱,圆柱半径与孔半径相当
adams 初级培训教程 第10章 原始约束
练习 10 – 举升机构 III
● 要检查模型图形化的拓扑关系:
1. 从菜单 Tools 下选择 Database Navigator。 2. 设置 Database Navigator 顶部的选项为 Graphical Topology。 3. 浏览部件 bucket 并看看有多少个约束加在在部件 bucket上。
练习 10 – 举升机构 III
● 验证约束的方向
● 现在你要通过验证你刚刚添加的垂直约束的 I 和 J 标记点的方向来验证你 所添加约束的正确性。
● 要验证约束的方向:
1. 取得你刚添加的垂直原始约束的信息。在该约束的图标上点击鼠标的右键 然后选择 Info。
2. 注意 I 和 J 标记点的名称,然后选择 Close。
练习 10 – 举升机构 III
● 问题描述
● 约束部件 bucket 以使部件 bucket 的下底面始终保持水平方 向 (这样可以保证部件 bucket 中乘客或货物的安全) ,如下 图所示:
练习 10 – 举升机构 III
● 模型描述
● 在本练习中,你将使用练习 9 中所存储的模型举升机构 II。
练习 10 – 举升机构 III
● 校验模型,然后运行仿真
● 本节中,你将进行一次使图标处于打开状态的仿真。
● 要校验模型并运行仿真:
1. 校验模型,该模型应该有 0 个自由度。 2. 从菜单 Settings 选择 Solver 再选择 Display。 3. 设置 Icons 为 On。 4. 仿真模型。
练习 10 – 举升机构 III
● 存储模型
要存储模型: 1. 以 ASCII 格式存储模型, (File Export)。 2. 如果你不想进行后面的练习,可以直接退出 ADAMS/View。
2章 4节 ADAMS约束力运动
圆柱副(CYLINDER)、旋转副(REVOLUTE)
螺旋副(SCREW)、齿轮副等
2019年2月14日星期四
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
高副约束
XMUT
第2章
曲线-曲线约束(CVCV) 点-曲线约束(PTCV)
2019年2月14日星期四
ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
2 加载各种运动副
XMUT
第2章
现在已经可以熟练加铰链副,现在加载其它运动副。 圆柱副:顾名思义,只能加载到圆柱体和圆孔之间的配合 ① 首先建立一个带孔的构件
ADAMS约束力运动
② 再建立一个圆柱,圆柱半径与孔半径相当
③ 两个构件间、加载圆柱副
2019年2月14日星期四
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
11 平移副建模仿真练习
XMUT
第2章
平移副仿真练习一:曲柄滑块机构 平移副仿真练习二:P39(自己练习) 在书上的例子中,增加一个曲柄和与其垂直的连杆之间的 固定副,为什么?
2019年2月14日星期四
ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
第二章 第4节
ADAMS约束、力、运动
第二章 第4节 ADAMS后处理应用
• 本节将引导您按照上节学习的基本设计步骤,使用 ADAMS/View来加载约束、力、力矩和运动:
XMUT
第2章 ADAMS约束力运动
1、在创建的机械模型中加载各种不同的约束、力、力矩 和运动,从而细化和深化模型; 2、通过模拟仿真模型在实际操作过程中的动作来测试所 建模型; 3、通过将模拟仿真结果与物理样机理论数据对照比较来 验证所设计的方案;
4中国科大2007研究生ADAMS教程_约束2007

Pin-in-Slot Cams
定义点在曲线上的约束.第一件(从动件) 定义点在曲线上的约束.第一件(从动件) 的一点保持在第二件(凸轮)的曲线上. 的一点保持在第二件(凸轮)的曲线上. 曲线可为平面或空间曲线,开或闭合曲线, 曲线可为平面或空间曲线,开或闭合曲线, 但尽可能采用闭合曲线. 但尽可能采用闭合曲线. 减少了2个移动自由度 个移动自由度. 减少了 个移动自由度.
关联副可建立任意两运动之间的关联
Couplers由下面的约束方程减少 由下面的约束方程减少 一个自由度: 一个自由度:S1q1 + S2q2 = 0 S1, S2 – 比例因子 q1 - 主动的运动 q2 – 关联的运动
几何约束
轴平行 轴垂直 定向 在平面内 在线上
Joint Primitives
Orientation 定向
一般用2Bodies - 1 Locations 一般用 两个物体的坐标系保持固定 的相对方位 两坐标系原点的相对位置 没有限制
I - 1 Locations 一般用 第一个物体的一点保持在 第二个物体的一平面上
Inline 点在直线内
一般用2Bodies - 1 Locations 一般用 第一个物体的一点保持在 第二个物体的一直线上
施加运动 Motion Generators
位移 Translation 回转 Rotation 点运动(单轴) 点运动(单轴)Point motion 点运动(多轴) 点运动(多轴)Point motion
点运动(单轴)Point motion 点运动(单轴)
一次选定一点,给定方向. 一个物体上可选多点施加运动,但不能在一条 线上两点施加沿此方向不同的运动.因为施加 一个运动相当限制了一个自由度,刚体不能变 形.同样,不能在两点施加绕同一轴不同的转 动.如图所示是可以的.
约束和载荷施加与修改2讲课文档

简单副连 接
高副 连接 简单约束工具集
现在六页,总共四十六页。
转动副施加过程
操作工具 下 方 状 态 参 数 设 置
指定物体 和位置
一个位置
两物体、 一个位置
两物体、 两位置
垂直栅格
指定方 向
指定方向
第一 物体
现在七页,总共四十六页。
第二 物体
• 注意: 在施加运动副的过程中,程序要求依次选 择被连接的构件1和构件2,ADAMS/View设定在 两个被连接的构件中,是构件1被连接到构件2上面。 例如:如果要使用旋转运动副将一扇门连接到门 框上,在选择被连接的构件时,首先应该选择门, 然后选择门框。
单向力、单项力矩、组合力、组合力矩
组合 力、 力矩
工具集
组
单
单项
组
项
力矩
合
力
力
合 力 矩
现在三十七页,总共四十六页。
单项力的施加
操作工具
参 数 设 置
现在三十八页,总共四十六页。
空间固定
物体固定
指定 方向
与栅格 垂直
大小设 置:常 量变量
组合力的施加
操作工具
参 数 设 置
指定物体 和位置
一个位置
是否 显示 连接
力
第二连接件
连接形式
现在十七页,总共四十六页。
初始参数 设置
1.5、指定约束
• ADAMS/View提供了5种常用的指定 约束工具。用户可以灵活运用这些约束 工具,组成不同的约束。
指定约束对话框
现在十八页,总共四十六页。
1.6、 定义机构的运动
• 运动的类型和定义值
• 通过定义机构遵循一定的规律进行运动,可以约束机 构的某些自由度,另一方面也决定了是否需要施加力 来维持所定义的运动。
ADAMS约束问题

ADAMS约束问题技术邻作者:普约尔文章所包含领域及技术点:约束、adams1引言虚拟样机分析软件ADAMS(Automatic Dynamic Analysis of Me chanical Systems),是对机械系统的运动学与动力学进行仿真计算的商用软件,目前己经被全世界各行各业的数百家主要制造商采用。
一个系统通常是由多个构建组成的,各个构件之间的这种约束通常存在某些约束关系,即一个构件限制另一个构件的运动,两个构件之间的这种约束关系,通常称为运动副或者铰链,ADAMS中运动副分为低副、高副和基本副[1][2],这些运动副对构件的自由度进行约束,A DAMS为每个约束列出一个或多个代数约束方程,在实际中,存在着大量的机构由于人为的带入虚约束而导致过约束的情况[3],有时需要通过引入虚约束来增加系统的刚度[4],在定义运动副过程中,往往会出现过约束及冗余约束的情况,文献[5]分析了过约束问题,文献[6]对凸轮机构的冗余情况进行了分析,用一个点线副和一个平行副的组合来代替滑移副来解决冗余约束,但是没有分析具体方法。
并联机构具有高精度、高刚度、承载能力大和运动反解简单等特点,成为机器人学者的研究热点[7],自由度小于6的少自由度并联机构,因其驱动部件少、结构简单、控制成本低等特点,一直是国际学术界关注的热点和研究的前沿[8-14],交叉型平面二自由度并联机构属于少自由并联机构家族中的一种。
本文对运用基本运动副代替低副约束刚体的自由度,同时不出现冗余约束,进行了详细的分析,总结了避免出现冗余约束的技巧,最后以交叉型平面二自由度并联机械手为对象,运用上述方法和技巧,详细介绍了在ADAMS中建立其运动学和动力学仿真模型的具体方法和步骤,为样机开发和实时控制系统的研究提供重要的参考。
2运用基本运动副约束物体自由度2.1运动副的约束关系一个构件在空间中具有6个自由度,即3个转动自由度和3个移动自由度。
不同运动副,限制构件自由度的个数不同,转动副限制构件的5个自由度,只有1个绕转轴转动的自由度,表1给出不同运动副对构件自由度的约束关系表1运动副对自由度约系束关X轴移动Y轴移动Z轴移动X轴转动Y轴转动Z轴转动自由度数目固定副××××××0旋转副×××××√1移动副××√×××1圆柱副××√××√2球铰副×××√√√3胡克铰×××√√×2平面副√√×××√3点-线副××√√√√4线-线副××√√√√4方向副√√√×××3点线副××√√√√4平行副√√√××√4点面副√√×√√√5垂直副√√√√√×52.2基本运动副构建圆柱副对于如图1的长方体,MARKER_1为固结于大地,位置和姿态与原点一致的点,MARKER_2为控制长方体位置和方向的点,姿态和位置与MARKER_1一致,其在空间中有6个自由度,要实现长方体具有绕X轴转动和沿X轴移动两个自由度,即圆柱副,使其绕Y轴转动、沿Y轴移动、绕Z轴转动以及沿Z轴移动将被限制,主要有以下几个步骤:1)添加垂直副约束,限制长方体绕轴转动,在垂直轴选项中选择2Bodies-2Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_ 1的X轴和Y轴,生成的Marker_3和Marker_4的Z轴与Marker_1的X轴和Y轴一致,如图2,要保证Marker_3与Marker_4的Z轴垂直,长方体绕Marker_1的Z轴的转动将被限制,其只有五个自由度,即绕Marker_1的X、Y轴的转动,和沿Marker_1的X、Y、Z轴的移动.图1ADAMS环境中长方体2)添加点线副来限制长方体沿Y和Z轴两个移动自由度,在点线副选项中选择2Bodies-1Location,实体分别选取长方体和和大地,位置选取长方体上的Marker_1,方向选择X轴,生成的Marker_5和Marker_6的Z轴与Marker_1X轴一致,如图3,考虑到1)中垂直轴副约束,长方体只有沿Marker_1的X轴的移动,和绕Marker_1的X、Y轴的转动三个自由度.3)添加垂直轴副来限制长方体绕Marker_1Y轴的转动,选择2B odies-2Location,实体分别选取长方体和大地,位置分别选取长方体上的Marker_2和大地上的Marker_1,方向选取Marker_1的X轴和Z轴,生成Marker_7和Marker_8的Z轴与Marker_1的X轴和Z 轴一致,如图4,要保证Marker_7与Marker_8的Z轴垂直,长方体绕Marker_1Y轴的转动将被限制,考虑到步骤1)、2),长方体剩下两个自由度,即沿Marker_1X轴的移动和绕Marker_1X轴的转动,通过在ADAMS中定义General Motion,选择2Bodies-1Location,实体分别选取长方体和大地,位置选取大地上Marker_1,方向选取M arker_1的Z轴,如图5,通过仿真测得绕X轴转动角度和沿X轴移动位移的曲线如图6、7,表明自由度的个数和方向是正确的.文章后续内容可到技术邻平台继续观看,进入技术邻后在页面最上面搜索文章的原标题即可观看。
adams约束与载荷的施加与修改

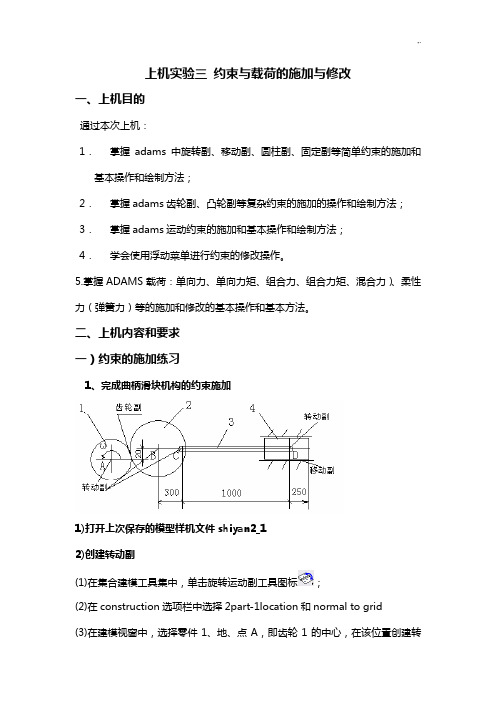
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
adams约束与载荷的施加与修改资料

上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2. 掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3. 掌握adams运动约束的施加和基本操作和绘制方法;4. 学会使用浮动菜单进行约束的修改操作。
5. 掌握ADAM载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1) 打开上次保存的模型样机文件shiyan2_12) 创建转动副(1) 在集合建模工具集中,单击旋转运动副工具图标’•:;(2) 在con struct ion 选项栏中选择2part-1locati on 和no rmal to grid(3) 在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3) 创建齿轮副(1) 在集合建模工具集中,单击标志点工具图标* -(2) 在主工具箱的选项栏中选择add to ground和global XZ(3) 在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4) 在集合建模工具集中,单击齿轮运动副工具图标H(5) 在对话框中,鼠标放在选项栏join name中,点击右键browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键browse浏览标志点, 输入刚创建的标志点名,点击0K,实现创建齿轮副4) 创建滑动副(1) 在集合建模工具集中,单击滑动运动副工具图标氐^;(2) 在con struct ion 选项栏中选择2part-1locati on 和pick feature(3) 在建模视窗中,选择依次滑块4、地(4) 选择点D下部某点作为移动副位置(5) 移动鼠标使箭头水平,点击鼠标,生成移动副5) 设置齿轮1的运动速度(1) 在集合建模工具集中,单击旋转运动工具图标「';;⑵在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6) 修改约束(1)打开B处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副:变为圆柱副汽』(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键一浮动菜单modify,打开运动修改对话框,点击funcction( time)右侧的图标…,打开编辑器对话框,在definea run time fun ctio n 中输入:step (time ,0,0, 10,60) + step (time , 10,60,20,-60)。
adams约束机构ppt1

3。约束点运动
(1)单点运动: 。指定两个构件沿1根周移动或转动 (2)一般点运动: 。指定两个构件沿3根周移动或转动
三
一般连接约束副的创建方式(JOINT_1)
(1)点选所需的连接约束图标; (2)确定连接构件的方法和选择连接方向; (3)依次选择相互连接的构件1、构件2、连接位置、连接方向。
四
施加齿轮副
齿轮副由两个齿轮、一个连接支架和两个连接副组成。在两齿轮的 啮 合点上设置速度标记(坐标系标记),齿轮副中的连接副可以是铰接接 棱柱副、圆柱副,模拟圆柱齿轮、斜齿轮、行星齿轮、锥齿轮和齿条。
六
指定约束
有五种常用的指定的约束工具。 指定约束的方法: (1)在Bulid菜单中选择Joints,显示连接对话框,选择有关约束工具; (2)在设置栏中选择连接构件的方法(3种,同前面所述); (3)选择连接方向(2种,同前面所述); (4)选择1个或2个构件; (5)确定连接点的位置; (6)选取连接方向
约束机构
第二节 常用运动副
一
三种连接构件方法的选择
(1) 1个位置(1location) (2) 2个构件1个位置(2bodies-1location) (3) 2个构件2个位置(2bodies-2location)
二
两种连接方向的选择
(1) 栅格方向(Normal to Grid) (2) 选取方向(Pick Feature)
约束机构
第一节 概述
• 一 约束类型 1) 常用运动副约束 转动副、棱柱副、球副等 (2)指定约束方向 限制某个运动方向 (3)接触约束 两构件在运动中发生接触时的相互约束 (4)约束运动 某构件按某个时间函数指定的轨迹运动 • 二 约束工具 主工具箱的连接工具集包含大 部分常用的约束命令,而由Build 菜单获得的连接对话框含有所有约 束命令。也可在连接工具集中点击 图标 ,进入连接对话框。
ADAMS学习资料
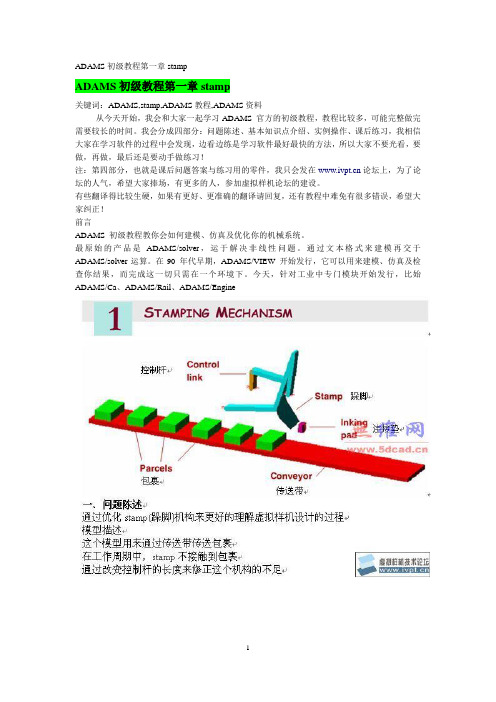
ADAMS初级教程第一章stampADAMS初级教程第一章stamp关键词:ADAMS,stamp,ADAMS教程,ADAMS资料从今天开始,我会和大家一起学习ADAMS 官方的初级教程,教程比较多,可能完整做完需要较长的时间。
我会分成四部分:问题陈述、基本知识点介绍、实例操作、课后练习,我相信大家在学习软件的过程中会发现,边看边练是学习软件最好最快的方法,所以大家不要光看,要做,再做,最后还是要动手做练习!注:第四部分,也就是课后问题答案与练习用的零件,我只会发在论坛上,为了论坛的人气,希望大家捧场,有更多的人,参加虚拟样机论坛的建设。
有些翻译得比较生硬,如果有更好、更准确的翻译请回复,还有教程中难免有很多错误,希望大家纠正!前言ADAMS 初级教程教你会如何建模、仿真及优化你的机械系统。
最原始的产品是ADAMS/solver,运于解决非线性问题。
通过文本格式来建模再交于ADAMS/solver运算。
在90 年代早期,ADAMS/VIEW 开始发行,它可以用来建模、仿真及检查你结果,而完成这一切只需在一个环境下。
今天,针对工业中专门模块开始发行,比始ADAMS/Ca、ADAMS/Rail、ADAMS/Engine三、实例操作第一操作练习:打开ADAMS/View官方的教程上分W 与U 的操作系统来说的,还有多种打开ADAMS/View 的方法,我个人觉得这些地方就不需要那么认真了,你只会双击快捷方式和开始中找到快捷方式单击就可以了。
打开后会出现这样的对话框,我们简单的介绍一下这里我们是导入一个.cmd 格式的文件(文件可 相应章节下载,文件名为stamp.cmd),具体操作步骤,下面章节再有相同操作可参考这里第二个操作练习:改变模型在这个操作练习中你会练习如何改变控制杆的长度(control_link)注:官方教程中此练习是导入的aview.cmd 文件,此文件包含菜单、宏、对话框等信息,但我下载的练习aview.cmd 文件出错,所以只有一个一个导入了,不过没关系,我们也学会了这种分别导入的方法1、在Stamper菜单下选择Setting Up Model.(只导入stamp.cmd 后没有Stamper菜单,此时需再导入stamper_menu.cmd 文件,方法同上)选择后Stamper_Setup dialog box 会出现,不过这里会出错,不怕,再导入一个stamping1_dbox.cmd 后出现下图2、使用箭头按纽来调整control_link 的长度随着箭头的调整control_link 的长度每次以3mm 的大小变化与control_link 连接的构件会随着control_link 长度的变化自动调整3、使用箭头按纽来调整来观察模型的变化,可以使用RESET恢复到原始值更多精彩,源自无维网()!第三个操作练习:对模型进行仿真,通过仿真观察模型是如何运动的1、从Stamper menu 选择Simulate.,同上需导入stamping2_dbox.cmd 后会出现2、如果要进行仿真,确定Single选项是被勾上的3、点APPLY来解此模型的运动方程,即进行仿真注:选择模型在at every output step 显示,如果你从At Every Output Step 变成Never则模型不会更新,但软件会运算得更快当一次single 仿真完成,ADAMS/View 将会告诉你penetration 是什么,一个正数代表penetration第四个操作练习:检测结果通过图表与动画来检测仿真后的结果1、从Stamper menu 选择Investigate Results,同上导入stamping3_dbox.cmd 文件后出现下图(图Measure Stamp Height Above Parcels显示了stamper高出parcels距离随时间的变化)4、点Save Curve保存当前的曲线,则下次的仿真曲线不会覆盖此曲线,但会重写已何存的曲线第五个操作练习:手动找到正确的高度在此操作中调整模型的高度从而找到正确的高度来满足与parcels 接触的最小机会重复上面的步骤,即使用 3 mm 作为增量来增加control_link 的长度直至你找到stamp 与parcels 接触时control_link 的长度如果stamp_height > 0, stamper 不与parcels 接触如果stamp_height < 0, stamper 与parcels. 接触,即重复第六个操作练习:进行设计研究此操作你要进行一次设计研究,此练习中会使用你指定的control_link 长度上下限与运算的次数来自动进行分析,默认的值你可以根椐需要进行修改。
ADAMS约束和载荷施加与修改
3)应该注意约束的方向是否正确。错误的约束 方向,可以导致某些自由度没有被约束,或者 约束了不应该约束的方向。
4)注意检查约束类型是否正确。
5)尽量使用一个运动副来完成所需的约束,如 果用多个运动副来约束两个构件,每个运动副 实现的自由度约束有可能会重复,这样会导致 无法预料的结果。
6)定期地检查样机系统的自由度。在Tools菜单, 选择Model verify命令,可以显示当前样机系统 自由度的信息。
图标或运动工具集图标,然后选择约束 工具。 • 另一种方法是在Build菜单中选择Joints 项,可显示连接对话框。 •
常用约束工具
约
接触约束工具
束
与 运
运
具
集
状态参数
设置
1.3、常用运动副
ADAMS/view提供了l 2种常用的运动副工具。 通过这些运动副,可以将两个构件连接起来。 被连接的构件可以是刚体构件、柔性构件或 者是点质量。又分为简单运动副和复杂运动 副。
实例:
运动速度大小为阶梯变化时
Step(time,t0,v0, t1,v1)
初
初
结
结
试
试束
束
时 间
速 度
时 间
时 间
正确地约束机构的若干技巧:
1)在样机建模时,应该逐步地对构件施加各种 约束,并且经常对施加的约束进行试验,检查 是否有约束错误,通过这种方法可以比较容易 地发现约束错误。
2)在设置运动约束时.要注意选择对象的顺序, 正确的选择对象。ADAMS/View设定在两个被 连接的构件中,构件1被连接到构件2上面
指定物体 和位置
一个位置
两物体、 一个位置
两物体、 两位置
06-第六章 ADAMS约束
S1-8
约束铰链的初始条件 (ICs)
● 约束初始条件
● 你可以指定回转副、移动副和圆柱副( revolute, translational, 和 cylindrical joints) 的位移和速度的初始条 件。
● ADAMS/View 在进行仿真时使用这些约束中所指定的初始条 件,而忽略加在约束上其它的力。
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
S1-21
练习 6 – 单自由度摆
● 给单摆重名名
现在你将单摆的名字从 PART_2 改为 Pendulum。
● 要给单摆重名名:
1. 在 link上点击鼠标右键再指向 Part:PART_2,然后选择 Rename。 显示给对象改名的对话窗口。
S1-7
自由度 (DOF)(续)
● 系统自由度 (DOF) 的计算
● ADAMS/View 通过格瑞伯勒 (Gruebler) 公式估算系统的自由度数 :
SystemDOF (number of movable partsDOF/part)
[#Constraints #DOF(Constraint)] i type
● ADAMS/View 也在检查下面各种情况后再给出系统实际的自由度数 :
● 每个约束连接的部件是否合适。
● 每个约束指定的方向是否正确。
● 每个约束所移去的自由度(或移动的或转动的)。
● 系统中存在的冗余约束。
● 参见:附录 A 中各约束所移去的自由度 。
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
第九章Adams约束驱动和函数

设置工作目录为 exercise_dir/mod_09_lift_mech_2。 从目录下 exercise_dir/mod_08_lift_mech_1,输入你在前面练习 中所生成的模型文件。 如果你需要一个上一个练习最终的模型文件,则输入目录 exercise_dir/mod_08_lift_mech_1/ completed 下的文件 lift_mech_I_completed.cmd 。
S1-16
练习 9 – 举升机构 II
●
可选任务
如果你在练习举升机构 I 中没有做的话,你可以: 1. 使用工具 Torus ,增加轮胎。 2. 使用倒圆角工具 Fillet 对部件 base 上增加一些圆角。
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
(ADM701 教程讲解及练习)
MSC.Software 公司
2010年11月
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
Part Number: ADAM*V2005*Z*FSP*Z*SM-ADM701-NT1
Copyright 2010 MSC.Software Corporation S1-6
练习 9 – 举升机构 II
● 问题描述
● 如下图所示,对举升机构添加约束和驱动:
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
S1-7
练习 9 – 举升机构 II
第六章 Adams约束

● 注意: 相对于将多个部件“固结”在一起的方式而言,
角度测试
● 角度测试的定义: 通常用于测试一个内角, θ:
● 两个矢量之间的夹角 ● 通过三个标记点来定义 ● 在整个仿真过程起作用
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
S1-18
练习 6 – 单自由度摆
●
要建立单摆的连杆:
1. 激活坐标窗口。 2. 在主工具箱,在 Rigid Body 工具包上点击鼠标的右键然后选择工
具面的参数:
选择 New Part. 选择 Length,并在 Length 一栏内输入 450 mm然后点击 Enter键。 选择 Width,并在 Width 一栏内输入 20 mm 然后点击 Enter键。 选择 Depth,并在 Depth 一栏内输入 27.5 mm 然后点击 Enter 键。
束。 ● 用户定义的只在C++ Solver中支持的约束。 ● 对一个模型定义的单一约束方程。 ● 固执约束以 FUNC = 0 的方式定义,可使用 ADAMS C++ Solver 中任何的仿真过程的函 数来定义 FUNC.
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
。
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
S1-22
练习 6 – 单自由度摆
●
设置单摆的质量
●
adams约束与载荷的施加与修改
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
章节ADAMS约束力运动PPT课件

第10页/共59页
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
查看仿真结果,演示某个Marker的Measure
第11页/共59页
§2.4 ADAMS加载约束、力矩、运动 -8 1加载A平D移A副,M可S以加产生载直线约运束动
第16页/共59页
§2.4 ADAMS加载约束、力矩、运动 -131 注A意D构件A几M何数S据加的载修改约束
① 更改转动惯量 ② 更改宽度和厚度 ③ 更改质量
第17页/共59页
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
① 曲柄长度为20cm ② 连杆长度为学号后三位 ③ 滑块的尺寸为
第3页/共59页
§2.4 ADAMS加载约束、力矩、运动 -高1副约A束 DAMS加载约束
曲线-曲线约束(CVCV) 点-曲线约束(PTCV)
第4页/共59页
§2.4 ADAMS加载约束、力矩、运动 -2 1加载A各种D运A动M副 S 加载约束
现在已经可以熟练加铰链副,现在加载其它运动副。 圆柱副:顾名思义,只能加载到圆柱体和圆孔之间的配合 ① 首先建立一个带孔的构件 ② 再建立一个圆柱,圆柱半径与孔半径相当 ③ 两个构件间、加载圆柱副
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
1 打开约束工具包 右键单击运动副工具包 左键单击右下角的按钮 会弹出约束工具包 主要包括:Joints铰链(运动副)、Joint Primitive原始运动副
(基本)、运动生成器、高副约束、一般约束等
第1页/共59页
§2.4 ADAMS加载约束、力矩、运动 -具1体 说A明 如D下A M S 加 载 约 束
adams约束介绍学习资料
-Chapter 3
3.3、运动约束
• 运动约束通过对模型施加运动来实现对模型的约束 ,一旦定义好运动后,模型就会按照所定义的运动 规律进行运动,而不考虑实现这种运动需要多大的 力或力矩。ADAMS/View定义了两种类型的运动约束 :运动副运动和点运动。
碰撞限制 -- Curve-On-Curve Cams
Curve-on-curve Cams
物件的接触碰撞固定于曲线之间,因此,碰撞 点
不会离开曲线。 移除两个DOF
构成元件 两个物件 两条曲线
一般应用于凸轮对凸轮的系统
-Chapter 33:接点介绍-
修改接点
可使用 Modify Joint 对话框 修改接点的特性
-Chapter 3
11
名称
平行约束 Parallel Axes
垂直约束 Perpendicu lar
方向约束 Orientatio n
点面约束 Inplane
点线约束 Inline
图标
说明 约束构件1的连接点,只能沿着构件2连接点标 记的Z轴运动。去除2个旋转自由度
约束构件1的Z轴始终垂直于构件2的Z轴,即: 约束构件1只能绕构件2的二个轴旋转。去除1 个旋转自由度 限定两个零件的零件坐标系坐标轴同向,不能 相对旋转,去除3个旋转自由度
限定一个零件在另一个零件的某个平面上运动 ,去除1个移动自由度
限定第一个零件沿第二个零件上的某条直线运 动,去除两个移动自由度
-Chapter 3
09-第九章 ADAMS约束驱动和函数
S1-17
练习 9 – 举升机构 II
●
本章小结
1. 一个约束所参考的标记点的名称是什么?
________________________________________________ ________________________________________________ 2. 当在一个约束上添加驱动时,什么决定其运动的方向的正或 负? ________________________________________________ ________________________________________________ 3. 驱动是按照约束来考虑的么? 为什么? ________________________________________________ ________________________________________________ 4. 确定要在一个约束上达到一个指定运动所需要的驱动力或力 矩的大小是否可能?如何得到? ________________________________________________ ________________________________________________
3. 将部件 shoulder 与部件 mount之间以回转副进行连接(
):
● 选择 Normal To Grid.
ADM701, Section 1, November 2010 Copyright 2010 MSC.Software Corporation
● 右键选择圆柱的定位标记点。 S1-11
● 约束的 I 和 J 标记点在初始时刻θt = 0,即重合。 ● 在仿真过程中两个标记点的 z 轴始终重合。 ● 你可以定义驱动的量值为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
允许2个零件相对转动,去除3个移动自由 度 允许2件在一平面内运动,去除2个旋转和3 个移动自由度
-Chapter 3
6
名称
恒速副 Constant Velocity
万向节
运 Hooke/Univ ersal
动 螺旋副 副 Screw 约 束 齿轮副Gear
-Chapter 3
11
名称
平行约束 Parallel Axes
垂直约束 Perpendicu lar
方向约束 Orientatio n
点面约束 Inplane
点线约束 Inline
图标
说明 约束构件1的连接点,只能沿着构件2连接点标 记的Z轴运动。去除2个旋转自由度
约束构件1的Z轴始终垂直于构件2的Z轴,即: 约束构件1只能绕构件2的二个轴旋转。去除1 个旋转自由度 限定两个零件的零件坐标系坐标轴同向,不能 相对旋转,去除3个旋转自由度
关联副 Coupler
固定副 Fixed
图标
说明
限定两个旋转运动等速,去除1个旋转和3 个移动自由度
旋转运动在两个零件间传递,去除1个旋 转和3个移动自由度
允许一个零件相对于另一个零件的轴线旋 转,并且有轴向移动。需定义螺距值。正 螺距值创建右手螺纹。去除2个旋转和3个 移动自由度
复杂运动副,把3个零件和2个简单运动副 连接起来形成齿轮运动和其它类型的运动
把2个或3个简单运动副连接起来实现运动 或能量的传递
把2个零件固连在一起
-Chapter 3
7
连接方法:
一 三种连接构件方法的选择 (1) 1个位置(1location) (2) 2个构件1个位置(2bodies-1location) (3) 2个构件2个位置(2bodies-2location) 二 两种连接方向的选择 (1) 栅格方向(Normal to Grid) (2) 选取方向(Pick Feature) 三 一般连接约束副的创建方式(JOINT_1) (1)点选所需的连接约束图标; (2)确定连接构件的方法和选择连接方向; (3)依次选择相互连接的构件1、构件2、连接位置、连接方向。 四 举例施加齿轮副
adams约束介绍
-Chapter 3
约束分类
有 4 大类的约束….
运动副约束 基本约束 运动约束 高副约束
-Chapter 33:接点介绍-
Add-on (复杂) 约束 ...
3.1、运动副约束(Joints)
ADAMS/View总共有11种运动副,通过运动副来 实现约束,运动副在现实中都能找到与其对应 的物理模型,如铰接副、移动副等。每施加一 个运动副可把两个零件联系起来,被连接的零 件可以是刚体、柔性体和点质量,运动副可以 放置在模型中的任何位置。这11种运动副中 Gear和Coupler又称为复杂运动副,其余为简 单运动副,复杂运动副通过对简单运动副的组 合间接的把零件连接起来。
。
-Chapter 3
10
3.2、基本约束(Joint Primitives)
• ADAMS/View提供了5个基本约束,基本约束对 零件的相对运动进行了限定,如限定两个零件 必须平行运动,或者是限定它们的运动路线相 互垂直等。基本约束在现实中没有物理原型, 通过基本约束的组合可以产生定义与运动副约 束相同的约束,也可实现运动副约束无法实现 的复杂约束。
在速度标记命令
后面输入速度标记名称。 也可以右击输入框,选择-Chapter 3
Marker,Pick或Browse选择速度标记名称。 点击 ,完成齿轮副的创建。
五 举例施加关联副 对于皮带轮、链轮和滑轮可用关联副进
行仿真。 (1)建立各轮的连接副; (2)点击带轮工具图标 ; (3)先选择主动轮,再选择从动轮; (4)若有三个皮带轮,启动修改皮带轮对话框,进行修改
i
First part
Second part
j
InPlane 一个点只能沿着指定的 平面移动
Orientation 一个坐标系不能旋转
Perpendicular 一个坐标系可以对两个 轴旋转
1
Translational
3
Rotational
1
Rotational
Second part
First part
限定一个零件在另一个零件的某个平面上运动 ,去除1个移动自由度
限定第一个零件沿第二个零件上的某条直线运 动,去除两个移动自由度
-意
先、后关系 !
Description
DOF removed
Graphic
InLine
2
一个点只能沿着直线移动 Translational
-Chapter 3
3
运动副约束
-Chapter 3
4
-Chapter 3
名称
图标
说明
铰接副
运 Revolute 动 移动副
Translation
副 al 约 圆柱副
Cylindrical
束 球副 Spherical
平面副 Planar
允许2个零件相对转动,去除2个旋转和3个 移动自由度
允许2个零件相对移动,去除3个旋转和2个 移动自由度
(2)在设置栏中选择连接构件的方法(3种,New,add ,ground); (3)选择连接方向(2种,栅格方向或选取方向); (4)选择1个或2个构件; (5)确定连接点的位置; (6)选取连接方向
齿轮副由两个齿轮、一个连接支架和两个连接副组成。在两齿轮的啮 合点上设置速度标记(坐标系标记),齿轮副中的连接副可以是铰接接 棱柱副、圆柱副,模拟圆柱齿轮、斜齿轮、行星齿轮、锥齿轮和齿条。
-Chapter 3
8
齿轮副创建方法:
(1)设置个齿轮的连接副;
(2)设置数度标记;
a 计算齿轮啮合点的坐标,
Second part
First part
First
part
Second part
Parallel Axis 一个坐标系可以对一个 轴旋转
2
Rotational
First part Second part
-Chapter 33:接点介绍-
基本约束方法
(1)在Bulid菜单中选择Joints,显示连接对话框,选择有关约束工具 ;
b 点击图标 ,点击啮合点。
c 修改速度标记的坐标和方向,Z轴方
向应指向齿轮啮合点的运动方向。
(3)选择齿轮副 ,出现对话框:在
后面输入两个齿轮
连接副的名称,两名称中间用“,”连接。也可右击输入框,在出现 的
浮动菜单中选择Joint、Pick
(在模型中选择连接副),
或选择Browse…,在数据导
航对话框中选择连接副