adams基本介绍培训课件.ppt
合集下载
ADAMS教程很详细手把手教你学会PPT课件
▪ 选取物体的方法和固定约束一样。
✓选取旋转点的方法:
▪ 当两个物体选取过后,把光标放在要旋转的圆心附近(一般靠近圆弧处),这时圆心处会有一个白色圆圈 出现。如图1;
▪ 这时点右键,弹出点的列表,在其中选取一个圆心点(后面标注center)。如图2; ▪ 选取点后,如图3显示表示铰链约束添加成功。
✓注意:加铰链约束时视图平面一定要与旋转轴垂直,如下图。
▪ 先选取一个物体,再选取另一个,最后选取固定点。
✓选取物体的方法:
▪ 当光标接近物体时,会有标签显示出该零件的名称,此时点击左键即可选中。 ▪ 当附近物体较多时,在该区域点击右键,会弹出零件列表,在列表中选取即可。 ▪ 如果需要和大地固定,只需要在没有物体的地方点左键就行,大地在列表中不显示。
✓选取固定点的方法:
▪ 对于固定约束来说,固定点位置选在任何地方都可以,建议放在容易识别的地方。
第9页/共28页
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
约束设置
▪ 铰链约束
✓约束需要选取两个物体和一个旋转点: ▪ 先选取一个物体,再选取另一个,最后选取旋转点。
✓选取物体的方法:
▪ 添加接触关系
✓接触参数的设置。
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
碰撞刚度,一般钢与钢碰撞使用默认值,有塑料件参与 设为3800。具体数值可根据实际情况调整。 嵌入深度,根据精度要求可适当改小。 如果需要设置摩擦力,选取此项。
静摩擦系数 动摩擦系数
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
✓设置弹簧参数。在弹簧上点右键,如图选择Modify,弹出弹簧属性对话框。
✓选取旋转点的方法:
▪ 当两个物体选取过后,把光标放在要旋转的圆心附近(一般靠近圆弧处),这时圆心处会有一个白色圆圈 出现。如图1;
▪ 这时点右键,弹出点的列表,在其中选取一个圆心点(后面标注center)。如图2; ▪ 选取点后,如图3显示表示铰链约束添加成功。
✓注意:加铰链约束时视图平面一定要与旋转轴垂直,如下图。
▪ 先选取一个物体,再选取另一个,最后选取固定点。
✓选取物体的方法:
▪ 当光标接近物体时,会有标签显示出该零件的名称,此时点击左键即可选中。 ▪ 当附近物体较多时,在该区域点击右键,会弹出零件列表,在列表中选取即可。 ▪ 如果需要和大地固定,只需要在没有物体的地方点左键就行,大地在列表中不显示。
✓选取固定点的方法:
▪ 对于固定约束来说,固定点位置选在任何地方都可以,建议放在容易识别的地方。
第9页/共28页
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
约束设置
▪ 铰链约束
✓约束需要选取两个物体和一个旋转点: ▪ 先选取一个物体,再选取另一个,最后选取旋转点。
✓选取物体的方法:
▪ 添加接触关系
✓接触参数的设置。
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
碰撞刚度,一般钢与钢碰撞使用默认值,有塑料件参与 设为3800。具体数值可根据实际情况调整。 嵌入深度,根据精度要求可适当改小。 如果需要设置摩擦力,选取此项。
静摩擦系数 动摩擦系数
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
✓设置弹簧参数。在弹簧上点右键,如图选择Modify,弹出弹簧属性对话框。
ADAMS软件介绍(课件)
mar_1
.mod.pend.sph
Geometry
.mod.pend.mar_1
Marker
.mod.pend.cm
Marker
.mod.pend.mar_2
Marker
.mod.pend.cyl
Geometry
Creating some parts
Link Box Sphere Extrusion Importing a geometry from CAD package…. Parasolid…
Track Model
Let’s create some mechanisms
Simple pendulum
Single body – mass attached with a wire
wireis massless
Two body – mass attached to a link
Link has mass
WORKSHOP ONE DOF PENDULUM
Problem statement
Find the initial force supported by the pin at A for a bar that swings in a vertical plane, given the initial angular displacement (θ0) and initial angular velocity (θ0). Also, find the pendulum frequency.
VIRTUAL PROTOTYPING PROCESS
Build
Test
Review
Improve
Improve your design using: DOEs Optimization Automate your design process using: Custom menus Macros Custom dialog boxes
第5讲-ADAMS

4)载荷的建模
5)仿真策略的选择
仿真结束时间
积分步长
6)动力学仿真与结果分析
二、自由度数及广义坐标的概念
1、自由度及广义坐标 2、平面机构中任意一点的运动学
三、虚位移原理及广义力
1、虚位移原理
理想约束条件下,质点系平衡的充分必要条件是虚功为零。
v v δ WF = ∑ Fk δ rk = 0
3)专用后处理模块(ADAMS/PostProcessor) 其界面如下图所示。该模块用来输出高性能的动画,各种 数据曲线,该模块还可以进行曲线编辑和数字信号处理等, 使用户可以方便、快捷地观察、研究ADAMS的仿真结果。
4、简单应用
曲柄滑块机构的动力学仿真 y
已知: = 0.2m, l = 0.5m, l = 0.2m, e = 0.05m, J = 3kg .m 2 , l1 2 s2 A1
m k =1
δ WF = ∑ ( Fkxδ xk + Fkyδ yk ) = 0
m k =1
注意:1)虚功原理使用的前提; 2)变分的含义及运算的规则。
2、虚位移原理的广义坐标形式
任意点的位移 其虚位移
v v rk = rk ( q1 , q2 ,L qn ) v n ∂rk v δ rk = ∑ δ qi i =1 ∂qi
v v δ WF = ∑ Fk δ rk
m k =1
m n
而
v v ∂rk 得到: δ WF = ∑ Fk ∑ δ qi = k =1 i =1 ∂qi
v v ∂rk Qi = ∑ Fk ∂qi k =1
m
v v ∂rk ∑ ∑ Fk ∂q δ qi i =1 k =1 i
n m
ADAMS基础培训-实例讲解ppt课件
2.1 创建地块
点击鼠标右键打开工具包 点击Box图标 选择“On Ground ”,使其与大地固结在一起。从 (-2,1,0)单击鼠标,拖到(-18,-1,0)。 对模型进行重命名,Ground_block。
16
2.2 创建In Plane约束
在Build菜单中选择Joints , 点击Inplane图标 ,选 择2 Bod-1Loc,Pick Geometry Feature。 选择地块和钩子,在(-12,1,0)点击左键。 沿着钩子的内侧面将光标上移直到出现向上的箭头, 再点击鼠标左键。
4
一、创建模型
启动ADAMS/view并建立新的数据文件 熟悉界面,设置工作环境 创建设计点(Point) 创建几何模型(曲柄,手柄,连杆,锁钩) 创建约束(铰接)
1.1 建立新模型
启动软件,建立新模型 ,并命名为latch。
重力场设置 单位设置
6
1.2 工作环境设置
设置栏
单位设置
工作格栅设置
ADAMS基础培训 —实例讲解
1
弹簧挂锁模型
设计要求:
• 能产生至少800N的夹紧力。 • 手动夹紧,用力不大于80N。 • 手动松开时做功最少。 • 必须在给定的空间内工作。 • 有震动时,仍能保持可靠夹紧。
ADAMS动画演示
主要内容
一、创建模型 二、测试模型 三、验证测试结果 四、参数化模型 五、最优化设计
1、手柄与曲柄之间的Point_3, 2、手柄与连杆之间的Point_5, 3、连杆与钩子之间的Point_6, 4、钩子与曲柄之间的Point_2。
13
1.9 模型验证
验证模型:
4 移动物体 5 铰接约束 2 自由度
ADAMS软件介绍(课件)
Local coordinate systems (LCS):
Part coordinate systems (PCS) Markers
Part Coordinate Systems
Definition of part coordinate systems (PCS)
They are created automatically for every part. Only one exists per part. Location and orientation is specified by providing its location and orientation with respect to the GCS. When created, each part’s PCS has the same location and orientation as the GCS.
Markers
Definition of a marker It attaches to a part and moves with the part. Several can exist per part. Its location and orientation can be specified by providing its location and orientation with respect to GCS or PCS.
WORKSHOP – ONE DOF PENDULUM
Build the pendulum link
Now, build the link section of the pendulum using the following parameters: Width: 20 mm Depth: 27.5mm Endpoints: (0, 0, 0) and (450, 0, 0)
Part coordinate systems (PCS) Markers
Part Coordinate Systems
Definition of part coordinate systems (PCS)
They are created automatically for every part. Only one exists per part. Location and orientation is specified by providing its location and orientation with respect to the GCS. When created, each part’s PCS has the same location and orientation as the GCS.
Markers
Definition of a marker It attaches to a part and moves with the part. Several can exist per part. Its location and orientation can be specified by providing its location and orientation with respect to GCS or PCS.
WORKSHOP – ONE DOF PENDULUM
Build the pendulum link
Now, build the link section of the pendulum using the following parameters: Width: 20 mm Depth: 27.5mm Endpoints: (0, 0, 0) and (450, 0, 0)
Adams培训PPT幻灯片
9
二、文件结构及基本操作
2.2标准模式下的菜单基本操作(常用)
显示菜单(View) 常用功能: Assembly—选择当前显示的装配 Subsystem—选择当前显示的子系统 Pre-Set—系统预设的几个观察视角 Position/Orientation—用户自行使用的 视角 Render Mode—线框显示、阴影显示等 注:左侧为显示菜单中内容,右 侧为右键菜单中内容
悬架模板、转向模板、车轮模板、车身模板 制动模板、驱动模板……………
属性文件
属性文件
弹簧属性文件、减振器属性文件、 衬套属性文件、……………
6
二、文件结构及基本操作
2.1整车模型结构
以上各种文件分类存储于数据库分类子库(.tbl)中. 如ubsystems.tbl中,模板 放在templates.tbl中,
网卡物理地址: “开始”菜单→“运行”→“cmd”→“ipconfig/all” 安装过程中可能会提示错误,选择忽略。
3
一、软件的安装及运行
1.2软件的启动
关闭电脑中的360优化大师及安全卫士等其他杀毒软件,其可 能造成软件的突然关闭。
启动安装软件时安装的证书管理器LMTOOLS(每次开机后)
选择“start/stop/reread”标签,选中中间对话框中的“ADAMS”勾选 下面的“force server shutdown”,点击“stop server”
属性文件分类放置,如:弹簧属性文件放在springs.tbl中,减振器 属性文件放在dampers.tbl中……
Adams/acar自带数据库有共享数据库(shared_car_database.cdb)和个 人数据库(private.cdb),用户可根据需要自己添加数据库路径。
二、文件结构及基本操作
2.2标准模式下的菜单基本操作(常用)
显示菜单(View) 常用功能: Assembly—选择当前显示的装配 Subsystem—选择当前显示的子系统 Pre-Set—系统预设的几个观察视角 Position/Orientation—用户自行使用的 视角 Render Mode—线框显示、阴影显示等 注:左侧为显示菜单中内容,右 侧为右键菜单中内容
悬架模板、转向模板、车轮模板、车身模板 制动模板、驱动模板……………
属性文件
属性文件
弹簧属性文件、减振器属性文件、 衬套属性文件、……………
6
二、文件结构及基本操作
2.1整车模型结构
以上各种文件分类存储于数据库分类子库(.tbl)中. 如ubsystems.tbl中,模板 放在templates.tbl中,
网卡物理地址: “开始”菜单→“运行”→“cmd”→“ipconfig/all” 安装过程中可能会提示错误,选择忽略。
3
一、软件的安装及运行
1.2软件的启动
关闭电脑中的360优化大师及安全卫士等其他杀毒软件,其可 能造成软件的突然关闭。
启动安装软件时安装的证书管理器LMTOOLS(每次开机后)
选择“start/stop/reread”标签,选中中间对话框中的“ADAMS”勾选 下面的“force server shutdown”,点击“stop server”
属性文件分类放置,如:弹簧属性文件放在springs.tbl中,减振器 属性文件放在dampers.tbl中……
Adams/acar自带数据库有共享数据库(shared_car_database.cdb)和个 人数据库(private.cdb),用户可根据需要自己添加数据库路径。
adams基本介绍ppt课件
置
设置工作目录
4
二.Adams的工作界 面
1.工作区域 2.工具栏 3.选项卡 4.模型各部分、组件的浏览
5
2.1工作区域
改变工作区域视图、位置等操作
Adams中模型设计分析的主要区域
对工作区域颜色、显示等修改
6
2.1工作区域
1.工作栅格的修改
点击工具栏中Setting,选择 Working Grid Settings。出现右图 所示界面。
15
7.圆角多 边形板
8.拉伸体
16
一.ADAMS软件的基本介绍
虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的针对机械系统 运动学与动力学进行仿真分析的商用软件。在当今动力学进行 仿真分析的商用软件。在当今动力学分析软件市场上ADAMS独 占鳌头,拥有70%的市场份额。
梯台同样有三个可修改尺寸:长度、顶面半径、 底面半径。
14
5.圆环
6.连杆
可以看出控制圆环的为圆环的内径与外径
在模型建立的过程中,可以通过选中某个 几何体,然后通过Ctrl+X来删除几何体。
控制连杆外形的为宽度、深度、I、JMarker点。 两个Marker点可以控制连杆的角度与长度。在 Adams学习中Marker点是一个很重要的概念,在 后面几何约束部分,实际上就是通过Marker点之 间的函数关系来控制。
New Part
On Ground
Add to part
11
任意建立长方体, 通过 按键,
将几何体的表现 形式转换成右图 所示。
该图中包括几 何体质心位置。 相对坐标系 (Maker点)
设置工作目录
4
二.Adams的工作界 面
1.工作区域 2.工具栏 3.选项卡 4.模型各部分、组件的浏览
5
2.1工作区域
改变工作区域视图、位置等操作
Adams中模型设计分析的主要区域
对工作区域颜色、显示等修改
6
2.1工作区域
1.工作栅格的修改
点击工具栏中Setting,选择 Working Grid Settings。出现右图 所示界面。
15
7.圆角多 边形板
8.拉伸体
16
一.ADAMS软件的基本介绍
虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的针对机械系统 运动学与动力学进行仿真分析的商用软件。在当今动力学进行 仿真分析的商用软件。在当今动力学分析软件市场上ADAMS独 占鳌头,拥有70%的市场份额。
梯台同样有三个可修改尺寸:长度、顶面半径、 底面半径。
14
5.圆环
6.连杆
可以看出控制圆环的为圆环的内径与外径
在模型建立的过程中,可以通过选中某个 几何体,然后通过Ctrl+X来删除几何体。
控制连杆外形的为宽度、深度、I、JMarker点。 两个Marker点可以控制连杆的角度与长度。在 Adams学习中Marker点是一个很重要的概念,在 后面几何约束部分,实际上就是通过Marker点之 间的函数关系来控制。
New Part
On Ground
Add to part
11
任意建立长方体, 通过 按键,
将几何体的表现 形式转换成右图 所示。
该图中包括几 何体质心位置。 相对坐标系 (Maker点)
ADAMS-技术入门与提高课件

CHAPTER 02
Adams基础知识
建模基础
建模原则
建立准确、可靠的模型是Adams 应用的基础,需要遵循简明扼要 、符合实际、易于修改等原则。
建模流程
建模过程包括确定系统组成、选择 合适的元件和连接方式、设置参数 和属性等步骤,需按照一定顺序逐 步进行。
建模技巧
掌握一些建模技巧可以提高建模效 率和准确性,如合理利用模板、利 用Adams的自动生成功能等。
详细描述
在Adams中建立机器人模型,包括连杆、关节和驱动装置等。通过运动学和动力 学分析,计算机器人的运动轨迹和动态响应,验证机器人的性能指标,优化机器 人的结构和控制策略。
案例三:飞行器控制系统设计
总结词
飞行器控制系统是实现飞行器稳定控制和精确导航的关键系 统。通过Adams技术进行飞行器控制系统的设计和仿真,可 以提高飞行器的性能和安全性。
控制策略
控制策略是控制系统的核 心,需要根据具体应用需 求选择合适的控制算法。
控制系统仿真
通过在Adams中设置控制 策略,可以对控制系统进 行仿真分析。
仿真基础
仿真流程
仿真流程包括设置仿真参数、运 行仿真、分析结果等步骤,需按
照一定顺序逐步进行。
仿真精度与效率
在仿真过程中,需要平衡仿真精 度与效率的关系,以确保仿真的
可扩展性
Adams软件支持与其他 CAD、FEA和控制系统软 件的集成,可以扩展其应 用范围。
Adams软件应用领域
01
02
03
04
汽车工业
用于设计和分析汽车底盘、悬 挂和制动系统等。
航空航天工业
用于设计和分析飞行器、卫星 和火箭等。
船舶工业
用于设计和分析船舶和海洋工 程结构等。
ADAMS基础理论详解ppt
ADAMS虚拟样机技术
相关基础理论
湖南大学 杨华
一、机械系统结构的数学描述
• 构件——运动的单元 (意义同机械原理所定 义),以B表示。 • 铰——构件间的运动约 束(运动副是铰的一部 分),以H表示。 • 拓扑——各构件的联系 方式,用图表示如下。
一、机械系统结构的数学描述
• B0表示运动为已知的构 件(例如机架)。 • 铰定义为有向的目的:1) 铰连接的两个物体中定 义一个物体为参考物, 以描述另一物体的相对 运动。2)定义铰连接的 两个物体的作用力与反 作用力的正方向。
目标函数等值线— 使目标函数 f ( x , y ) =常数 c 的设计方案 集合。类比于山的 等高线,同一等值 线上所有设计方案 的好坏程度相同, 等值线中心为最优 方案(山的峰顶或 谷底)。
目标函数
设计空间
三、优化方法基础
• 数值迭代寻优方法 — 对多变量复杂目标函数 的优化问题,采用数值迭代计算法来求得最 优方案。其思想可类比于瞎子爬山 — 看不见 山顶在何处却要找到山顶:以任意点为起 点,探索附近若干点,得到一更好点;移动 到更好点,再以更好点为起点,循环进行, 直至探索不到更好点,则认为找到最优点 (山顶)。
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
相关基础理论
湖南大学 杨华
一、机械系统结构的数学描述
• 构件——运动的单元 (意义同机械原理所定 义),以B表示。 • 铰——构件间的运动约 束(运动副是铰的一部 分),以H表示。 • 拓扑——各构件的联系 方式,用图表示如下。
一、机械系统结构的数学描述
• B0表示运动为已知的构 件(例如机架)。 • 铰定义为有向的目的:1) 铰连接的两个物体中定 义一个物体为参考物, 以描述另一物体的相对 运动。2)定义铰连接的 两个物体的作用力与反 作用力的正方向。
目标函数等值线— 使目标函数 f ( x , y ) =常数 c 的设计方案 集合。类比于山的 等高线,同一等值 线上所有设计方案 的好坏程度相同, 等值线中心为最优 方案(山的峰顶或 谷底)。
目标函数
设计空间
三、优化方法基础
• 数值迭代寻优方法 — 对多变量复杂目标函数 的优化问题,采用数值迭代计算法来求得最 优方案。其思想可类比于瞎子爬山 — 看不见 山顶在何处却要找到山顶:以任意点为起 点,探索附近若干点,得到一更好点;移动 到更好点,再以更好点为起点,循环进行, 直至探索不到更好点,则认为找到最优点 (山顶)。
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
ADAMS软件操作基础精讲专题培训课件

设置工作栅格:Settings菜单→Working Grid
设置图标: Icons命令
2019/11/19
13
鼠标的应用
左键: 选择样机模型中的各种对象、选择菜单栏中的 命令、快捷工具图标命令和对话框中的有关命令。
右键: 主要应用于激发各种弹出式菜单和工具集
显示各种对象的弹出式菜单构件、标记、约束、运动、力等。 输入对话框中的参数文本输入栏,显示输入参数的弹出式菜
单。 后处理过程中,显示曲线图中各种对象的弹出式菜单,例如:
2019/11/19
9
第三章 知识要点和练习(续)
3-ቤተ መጻሕፍቲ ባይዱ ADAMS/View命名层次和规则 3-8 数据库及其操作 3-9 ADAMS/View提供几种报告信息的方式? 3-10 简述ADAMS分析技巧 3-11 ADAMS建模主要包括哪些内容
2019/11/19
10
虚拟样机技术及其应用--3
不必过分追求构件几何形体的细节部分 先从分析线性(阻尼)开始 →非线性(阻尼 )
整个系统分解为若干子系统 ,先对子系统仿真 分析和试验
应该尽量减小系统的规模,仅考虑影响样机性 能的构件
2019/11/19
6
虚拟样机动态分析
往复式压缩机曲柄滑块机构 确定:滑块的位置、速度和加速度;驱动力矩
2019/11/19
2
3.2 虚拟样机仿真分析基本步骤
机械系统建模 :
几何建模、运动副和运动约束、载荷
仿真分析
仿真结果分析 :
回放仿真结果、绘制仿真结果曲线
验证仿真分析结果 :
实验数据,与实验结果一致 ?
精制机械系统模型 :
机械原理ADAMS讲解 ppt课件
Robotics Institute, Beihang University
ADAMS实例2—无碳小车运动 仿真
Robotics Institute, Beihang University
ADAMS实例3—四足连杆机器 人
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
❖ 机构的组成要素——构件、运动副
构件 机构中的运动单元体,
组成机构的各个机件称为构件。 构件可能是一个零件,也可能 由几个零件固定连接而成。
零件 是制造的单元体。
知识复习1-机构的组成
运动副 由两个构件直接接触组成的可动连接称为运动副。
转动副 凸轮副
移动副
齿轮副
螺旋副
球面副
知识复习2-解析法作平面机构的运动分析
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS实例2—无碳小车运动 仿真
Robotics Institute, Beihang University
ADAMS实例3—四足连杆机器 人
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS基本知识
Robotics Institute, Beihang University
ADAMS基本知 识
Robotics Institute, Beihang University
❖ 机构的组成要素——构件、运动副
构件 机构中的运动单元体,
组成机构的各个机件称为构件。 构件可能是一个零件,也可能 由几个零件固定连接而成。
零件 是制造的单元体。
知识复习1-机构的组成
运动副 由两个构件直接接触组成的可动连接称为运动副。
转动副 凸轮副
移动副
齿轮副
螺旋副
球面副
知识复习2-解析法作平面机构的运动分析
ADAMS基本知 识
Robotics Institute, Beihang University
ADAMS数据使用介绍精品PPT课件

的导数间关系。F ( y, y, q, q,t) 0
• General state equation:微分方程组和代数方程
组,, oxutpuf t(sx。, u, t), y g(x, u, t)
• Linear state equation:经典的状态方程,用数
组、矩阵表示。 x Ax Bu y Cx Du
样条图形 表示
线性插补
符号 原始曲线 样条曲线 斜率曲线 尾部插值
点数 样条类型 重计算
创建或修改Spline单元
数据表
BiuldData elementSpline
样条名称 类型:2D, 3D 观看方式:数据表、曲线图 单位:长度、力、变形、….
插补:线性、三次
在最后添加数据 在最前添加数据
在指定行后插数据 删去指定行
• Transfer function:单输入-单输出传递函数,
用数组表示。 G(s) y(s) x(s)
• State variable:用以定义代数方程。
微分方程
m*x'' + c*x' + k*x - f(t) = 0
• x = displacement of mass • x' = velocity (i.e. x dot) • x'' = acceleration (i.e. x dot-dot) • m = mass = 5 • c = damper damping constant = 10 • k = spring stiffness constant = 20 • f(t) = force applied to mass
系统单元 System elements
• General state equation:微分方程组和代数方程
组,, oxutpuf t(sx。, u, t), y g(x, u, t)
• Linear state equation:经典的状态方程,用数
组、矩阵表示。 x Ax Bu y Cx Du
样条图形 表示
线性插补
符号 原始曲线 样条曲线 斜率曲线 尾部插值
点数 样条类型 重计算
创建或修改Spline单元
数据表
BiuldData elementSpline
样条名称 类型:2D, 3D 观看方式:数据表、曲线图 单位:长度、力、变形、….
插补:线性、三次
在最后添加数据 在最前添加数据
在指定行后插数据 删去指定行
• Transfer function:单输入-单输出传递函数,
用数组表示。 G(s) y(s) x(s)
• State variable:用以定义代数方程。
微分方程
m*x'' + c*x' + k*x - f(t) = 0
• x = displacement of mass • x' = velocity (i.e. x dot) • x'' = acceleration (i.e. x dot-dot) • m = mass = 5 • c = damper damping constant = 10 • k = spring stiffness constant = 20 • f(t) = force applied to mass
系统单元 System elements
《ADAMS全面教程》课件
动力学基础
牛顿第二定律
Adams中通过给定初始条件和外力, 利用牛顿第二定律计算系统的运动状 态。
刚体动力学
弹性动力学
考虑弹性元件的变形和应力,以及弹 性元件对系统运动的影响。
考虑刚体的平动和转动,以及刚体间 的相对运动。
控制系统基础
控制策略
介绍常见的控制策略,如PID控制、模糊控制等 。
控制系统建模
03
Adams高级功能
优化设计
总结词
Adams优化设计功能可以帮助用户找到满足设计目标的最佳 参数组合。
详细描述
Adams优化设计功能基于多目标遗传算法,能够自动搜索和 迭代,找到满足多个设计目标的最佳参数组合。用户可以设 置不同的设计变量、约束和目标函数,以实现高效的优化设 计。
多体动力学
总结词
Adams多体动力学功能可以模拟复杂机械系统的运动和动力学行为。
详细描述
Adams多体动力学功能基于多体动力学理论,能够模拟复杂机械系统的运动和 动力学行为,包括刚体和柔性体的运动、碰撞、接触等。用户可以建立复杂机 械系统的模型,并进行运动学和动力学仿真分析。
控制系统设计
总结词
Adams控制系统设计功能可以帮助用户设计和分析控制系统。
05
Adams常见问题解答
软件安装与配置
总结词
软件安装与配置是使用Adams软件的第一 步,也是确保软件正常运行的关键。
详细描述
在进行Adams软件安装之前,需要先确认 计算机系统是否满足软件的系统要求。安装 过程中,需要选择正确的安装路径并按照提 示完成安装。安装完成后,需要进行软件配 置,包括设置工作目录、选择求解器和许可 证配置等。
基于多体动力学理论,通 过建立系统动力学模型, 模拟和分析复杂机械系统 的动态行为。
ADAMS简介PPT课件
户可以快速地驾驶你设计的汽车进行各种仿真试验,模拟驾驶员的各种动作,例 如:转弯、制动、加速、换档及离合器操纵等。当MSC.ADAMS/Driver与 MSC.ADAMS /Tire同时使用时,工程师就可以同时分析在不平路面和山路等工 况下三维路面的驾驶性能。
2
6.1 概述
1 ADAMS软件的特点
☆ 利用交互式图形环境和零件库、约束库、力库建立机械系统三维参数 化模型。
☆ 分析类型包括运动学、静力学和准静力学分析以及线性和非线性动力 学分析,包含刚体和柔性体分析。
☆ 具有先进的数值分析技术和强有力的求解器,使求解快速、准确。 ☆ 具有组装、分析和动态显示不同模型或同一个模型在某一个过程变化
6 机械系统仿真软件ADAMS运用技术简介
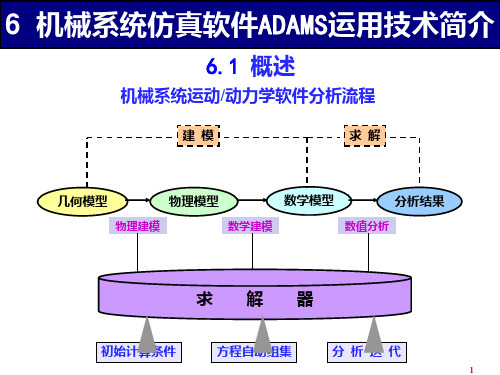
6.1 概述
机械系统运动/动力学软件分析流程
建模
求解
几何模型
物理模型
数学模型
分析结果
物理建模
数学建模
数值分析
求解器
初始计算条件
方程自动组集
分析迭代
1
6.1 概述
ADAMS ( Automatic Dynamic Analysis of Mechanical System)软件是世界上使用范围最广的虚拟样机仿真软件。用户使用 ADAMS软件,可以建立包括机-电-液一体化在内的、任意复杂系统的 多体动力学虚拟样机模型,能为用户提供从产品概念设计、方案论证 、详细设计、到产品方案修改、优化、试验规划甚至故障诊断等各阶 段、全方位、高精度的仿真计算分析结果。
☆ ADAMS/Durability——耐久性分析模块,是按工业标准的耐久性文 件格式的时间历程数据接口。
8
6.2 ADAMS软件的模块
※ 接口模块
2
6.1 概述
1 ADAMS软件的特点
☆ 利用交互式图形环境和零件库、约束库、力库建立机械系统三维参数 化模型。
☆ 分析类型包括运动学、静力学和准静力学分析以及线性和非线性动力 学分析,包含刚体和柔性体分析。
☆ 具有先进的数值分析技术和强有力的求解器,使求解快速、准确。 ☆ 具有组装、分析和动态显示不同模型或同一个模型在某一个过程变化
6 机械系统仿真软件ADAMS运用技术简介
6.1 概述
机械系统运动/动力学软件分析流程
建模
求解
几何模型
物理模型
数学模型
分析结果
物理建模
数学建模
数值分析
求解器
初始计算条件
方程自动组集
分析迭代
1
6.1 概述
ADAMS ( Automatic Dynamic Analysis of Mechanical System)软件是世界上使用范围最广的虚拟样机仿真软件。用户使用 ADAMS软件,可以建立包括机-电-液一体化在内的、任意复杂系统的 多体动力学虚拟样机模型,能为用户提供从产品概念设计、方案论证 、详细设计、到产品方案修改、优化、试验规划甚至故障诊断等各阶 段、全方位、高精度的仿真计算分析结果。
☆ ADAMS/Durability——耐久性分析模块,是按工业标准的耐久性文 件格式的时间历程数据接口。
8
6.2 ADAMS软件的模块
※ 接口模块
ADAMS使用入门PPT幻灯片

• ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰 值载荷以及计算有限元的输入载荷等。
• ADAMS软件由基本模块、扩展模块、接口模块、专业领域模块及工具箱5 类模块组成。用户不仅可以采用通用模块对一般的机械系统进行仿真, 而且可以采用专用模块针对特定工业应用领域的问题进行快速有效的建 模与仿真分析。
• ADAMS/View支持参数化建模,以便能很容易地修改模 型并用于实验研究。
• 用户在仿真过程进行中或者当仿真完成后,都可以观 察主要的数据变化以及模型的运动。这些就像做实际 的物理试验一样。
-Chapter 1:软件简介-
6
ADAMS/Solver : • 一个自动建立并解算用于机械系统运动仿真方程的, 快速、稳定的数值分析工具。
你可以设定工作格点的位 置与设定/自订工作平面
设定位置...
绝对原点 现有的坐标系统
设定坐标平面...
绝对坐标轴向 Pre-defined axes, edges, or face normals Locations of existing CSs or vertices
-Chapter 2:环境介绍-
9模型建构Leabharlann 境欲定义模型建构环境...
设定坐标系统
ADAMS/View 使用 直角坐标 系 你可以设定为 圆柱坐标 或 球坐标 欲设定坐标系统 …
使用 主功能表 Settings | Coordinate System
工作目 录
设定单位
欲设定单位… 使用 主功能表
Settings | Units
设定重力
-Chapter 2:环境介绍-
21
状态栏快捷工具(3)
打开模型信息窗口:
• ADAMS软件由基本模块、扩展模块、接口模块、专业领域模块及工具箱5 类模块组成。用户不仅可以采用通用模块对一般的机械系统进行仿真, 而且可以采用专用模块针对特定工业应用领域的问题进行快速有效的建 模与仿真分析。
• ADAMS/View支持参数化建模,以便能很容易地修改模 型并用于实验研究。
• 用户在仿真过程进行中或者当仿真完成后,都可以观 察主要的数据变化以及模型的运动。这些就像做实际 的物理试验一样。
-Chapter 1:软件简介-
6
ADAMS/Solver : • 一个自动建立并解算用于机械系统运动仿真方程的, 快速、稳定的数值分析工具。
你可以设定工作格点的位 置与设定/自订工作平面
设定位置...
绝对原点 现有的坐标系统
设定坐标平面...
绝对坐标轴向 Pre-defined axes, edges, or face normals Locations of existing CSs or vertices
-Chapter 2:环境介绍-
9模型建构Leabharlann 境欲定义模型建构环境...
设定坐标系统
ADAMS/View 使用 直角坐标 系 你可以设定为 圆柱坐标 或 球坐标 欲设定坐标系统 …
使用 主功能表 Settings | Coordinate System
工作目 录
设定单位
欲设定单位… 使用 主功能表
Settings | Units
设定重力
-Chapter 2:环境介绍-
21
状态栏快捷工具(3)
打开模型信息窗口:
ADAMS教程ppt分析

1.2 虚拟样机技术的起源及发展
虚拟样机技术是一项新生的工程技术。 借助于这项技术,工程师们可以在计 算机上建立机械系统的模型,伴之以 三维可视化处理,模拟在现实环境下 系统的运动和动力特性,并根据仿真 结果精化和优化系统的设计与过程。
1.3 虚拟样机技术应用领域
虚拟样机技术已经广泛地应用在各个 领域里: 1、汽车制造业 2、工程机械 3、航天航空业 4、国防工业 5、通用机械制造业
第三章 ADAMS基本操作
3.1 ADAMS的基本模块介绍
ADAMS/View 基本环境
ADAMS基本应用程序 ADAMS/Solver 求解器
ADAMS/PostProcessor 后处理
ADAMS/View
可以像建立物理样机一样建立任何机械系统的虚 拟样机。首先建立运动部件(或者从CAD软件中导 入)、用约束将它们连接、通过装配成为系统、 利用外力或运动将他们驱动。
复杂机器仿真时 要循序渐进 完成几个零件的 约束添加后就进 行一次仿真
第四章 几何建模
几何建模
几何建模是ADAMS/View仿真分析的第一 步,在开始的时候,都要先建立好几何 模型,然后通过约束和载荷等条件的添 加完成虚拟样机模型以进行仿真分析。
4.1 实体模型
ADAMS/View中实体模型获得有两种方法
可以对以机械部件、控制系统和柔性部件组成的 多域问题进行分析。
支持多种分析类型,其中包括运动学、静力学、 准静力学、线性或非线性动力学分析。
使用稳定的建模方法可以对巨大的模型进行分析。
ADAMS/PostProcessor
显示ADAMS仿真结果的可视化图形界面 。
提供了一个统一化的界面,以不同的方式回放仿 真的结果。为了能够反复使用,页面设置以及数 据曲线格式都能保存起来,这样既有利于节省时 间也有利于整理标准化的报告格式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单击New Model建立新的模 型文件。
单击Existing Model导入 已建好的模型文件。
ADAMS动力学仿真相关培训
双击 Adams View出现 左图所示 界面。
制作:机械小白
1.3.工作目录等基本设置
自定义模型名称(英文、 数字组成,不能包含中 文符号。)
设置重力加速度rt
On Ground
Add to part
制作:机械小白
任意建立长方体, 通过 按键,
将几何体的表现 形式转换成右图 所示。
ADAMS动力学仿真相关培训
该图中包括几 何体质心位置。 相对坐标系 (Maker点)
模型中的BOX_1、PART_2、MARKER_1等都 可进行重命名,方面建模。
工作区域大小的设置 栅格的大小
栅格中圆点及轴 线颜色的设置, 不常用,默认即 可。
制作:机械小白
2.1工作区域
单击工具栏中的 Settings中的Icon Settings,出现图标 设置界面。
可在绿色框中进行 图标尺寸大小的设 置,具体大小自行 设定。
进行栅格背景颜色设置
隐藏或显示栅格
切换几何体表现形式
几何创建部分:进行刚体、柔性体、 布尔运算等几何的创建。
约束连接部分:包括理想约束连 接、基本约束、齿轮、耦合、凸 轮等约束连接方式。
力、载荷:包括力、 力距、衬套力、接触 力等
设计研究:包括几何参数化、 设定目标函数、优化设计等。
制作:机械小白
2.2建模选项卡介绍(常用)
ADAMS动力学仿真相关培训 机械常见传动驱动装 置:齿轮、链条、皮 带轴承、马达等
件几何图形库、约束库和力库,将便捷的图标操作、菜单操作、鼠标点取操作与
交互式图形建模、仿真计算、动画显示、优化设计、X-Y曲线图处理、结果分析和
数据打印等功能集成在一起。
常
ADAMS/Solver(求解器)是ADAMS软件的仿真仿真“发动机”,它自动形成机
用
械系统模型的动力学方程,提供静力学、运动学和动力学的解算结果。
Adams中模型设计分析的主要区域
对工作区域颜色、显示等修改 制作:机械小白
2.1工作区域
1.工作栅格的修改
点击工具栏中Setting,选择 Working Grid Settings。出现右图 所示界面。
设置栅格方向,平行于XY 面、YZ面或XZ面。
ADAMS动力学仿真相关培训 Rectangular:矩形 坐标系 Polar:极坐标系
双击PART_2可质量、密度、泊松比、惯性矩、材料等修改。
制作:机械小白
ADAMS动力学仿真相关培训
3.球
4.梯台
球体有三个可修改尺寸:X、Y、Z方向的半径,三个 半径相同为球,不同为椭球。
梯台同样有三个可修改尺寸:长度、顶面半径、 底面半径。
制作:机械小白
5.圆环
6.连杆
ADAMS动力学仿真相关培训
ADAMS可对虚拟机械系统进行静力学、运动学和动力学分析, 输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真 可用于预测机械系统的性能、运动范围、碰撞监测、峰值载荷 以及计算有限元的输入载荷等。
制作:机械小白
ADAMS动力学仿真相关培训
1.1.ADAMS常用的模块
ADAMS/View(界面模块)是以用户为中心的交互图形环境,它提供丰富的零
隐藏或显示图标(如 约束、相对坐标系、 力等符号)
ADAMS动力学仿真相关培训
改变工作界面的视图(主、右、俯)
放大:快捷键Z
旋转:快捷键R
平移:快捷键T
适应界面
局部放大:快 捷键W
制作:机械小白
2.2建模选项卡介绍(常用)
驱动:包括旋 转驱动、线型 驱动、三向点 驱动。
ADAMS动力学仿真相关培训
单位制、重力加 速度也可以在 Settings中进行设
置
ADAMS动力学仿真相关培训
设置工作目录 制作:机械小白
二.Adams的工作界 面
1.工作区域
2.工具栏
3.选项卡
4.模型各部分、组件的浏览
ADAMS动力学仿真相关培训 制作:机械小白
2.1工作区域
ADAMS动力学仿真相关培训 改变工作区域视图、位置等操作
度。
其他模块:MECHANISM/Pro(Pro/E接口)是连接Pro/E与ADAMS之间的桥梁,
ADAMS/Car(轿车模块)能够快速建造高精度的整车虚拟样机,进行各种试验工
况下整车的动力学响应,ADAMS/Rail(铁道模块),ADAMS/Driver(驾驶员模块)
等模块。
制作:机械小白
1.2.软件界面—2016版
进行振动分析、疲劳分 析等。
进行仿真模拟
制作:机械小白
2.2.1几何创建
1. 长方体
实体几何创建
图框中若打勾 则表示尺寸固 定,反之则可 以在工作区域 通过鼠标拖动 形成三维尺寸。
可以看出决定 长方体的有三 个要素。
ADAMS动力学仿真相关培训
几何创建的附着属性也包括三 个: New Part:独立的几何零件, 无附着点。 On Ground:几何体附着在大地 上。 Add to Part:新的几何体附着 在其他几何上组合成一个新的 几何形状。
可以看出控制圆环的为圆环的内径与外径
ADAMS动力学仿真相关培训
一.ADAMS软件的基本介绍
虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的针对机械系统 运动学与动力学进行仿真分析的商用软件。在当今动力学进行 仿真分析的商用软件。在当今动力学分析软件市场上ADAMS独 占鳌头,拥有70%的市场份额。
模
ADAMS/Solver有各种建模和求解选项,以便精确有效地解决各种工程问题。 ADAMS/Flex(柔性分析模块)提供ADAMS软件与有限元分析软件之间的双向
块
数据交换接口。利用它与ANSYS、MSC/NASTRAN、ABQUS、I-DEAS等软件的接口,
可以方便地考虑零部件的弹性特性,建立多体动力学模型,以提高系统的仿真精
双击模型树中的BOX_1,出现如上对话框,在红框 所示栏中可进行长方体三维尺寸的修改。
双击MARKER_1,可在绿框所示栏中进行几何初始位置的修改 制作:机械小白
2.圆柱体
任意建立 圆柱几何 体。
ADAMS动力学仿真相关培训
可进行圆柱长 度、半径的修 改。
通过调整数值 改变几何的平 滑度,数值越 大,圆形越圆。
单击Existing Model导入 已建好的模型文件。
ADAMS动力学仿真相关培训
双击 Adams View出现 左图所示 界面。
制作:机械小白
1.3.工作目录等基本设置
自定义模型名称(英文、 数字组成,不能包含中 文符号。)
设置重力加速度rt
On Ground
Add to part
制作:机械小白
任意建立长方体, 通过 按键,
将几何体的表现 形式转换成右图 所示。
ADAMS动力学仿真相关培训
该图中包括几 何体质心位置。 相对坐标系 (Maker点)
模型中的BOX_1、PART_2、MARKER_1等都 可进行重命名,方面建模。
工作区域大小的设置 栅格的大小
栅格中圆点及轴 线颜色的设置, 不常用,默认即 可。
制作:机械小白
2.1工作区域
单击工具栏中的 Settings中的Icon Settings,出现图标 设置界面。
可在绿色框中进行 图标尺寸大小的设 置,具体大小自行 设定。
进行栅格背景颜色设置
隐藏或显示栅格
切换几何体表现形式
几何创建部分:进行刚体、柔性体、 布尔运算等几何的创建。
约束连接部分:包括理想约束连 接、基本约束、齿轮、耦合、凸 轮等约束连接方式。
力、载荷:包括力、 力距、衬套力、接触 力等
设计研究:包括几何参数化、 设定目标函数、优化设计等。
制作:机械小白
2.2建模选项卡介绍(常用)
ADAMS动力学仿真相关培训 机械常见传动驱动装 置:齿轮、链条、皮 带轴承、马达等
件几何图形库、约束库和力库,将便捷的图标操作、菜单操作、鼠标点取操作与
交互式图形建模、仿真计算、动画显示、优化设计、X-Y曲线图处理、结果分析和
数据打印等功能集成在一起。
常
ADAMS/Solver(求解器)是ADAMS软件的仿真仿真“发动机”,它自动形成机
用
械系统模型的动力学方程,提供静力学、运动学和动力学的解算结果。
Adams中模型设计分析的主要区域
对工作区域颜色、显示等修改 制作:机械小白
2.1工作区域
1.工作栅格的修改
点击工具栏中Setting,选择 Working Grid Settings。出现右图 所示界面。
设置栅格方向,平行于XY 面、YZ面或XZ面。
ADAMS动力学仿真相关培训 Rectangular:矩形 坐标系 Polar:极坐标系
双击PART_2可质量、密度、泊松比、惯性矩、材料等修改。
制作:机械小白
ADAMS动力学仿真相关培训
3.球
4.梯台
球体有三个可修改尺寸:X、Y、Z方向的半径,三个 半径相同为球,不同为椭球。
梯台同样有三个可修改尺寸:长度、顶面半径、 底面半径。
制作:机械小白
5.圆环
6.连杆
ADAMS动力学仿真相关培训
ADAMS可对虚拟机械系统进行静力学、运动学和动力学分析, 输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真 可用于预测机械系统的性能、运动范围、碰撞监测、峰值载荷 以及计算有限元的输入载荷等。
制作:机械小白
ADAMS动力学仿真相关培训
1.1.ADAMS常用的模块
ADAMS/View(界面模块)是以用户为中心的交互图形环境,它提供丰富的零
隐藏或显示图标(如 约束、相对坐标系、 力等符号)
ADAMS动力学仿真相关培训
改变工作界面的视图(主、右、俯)
放大:快捷键Z
旋转:快捷键R
平移:快捷键T
适应界面
局部放大:快 捷键W
制作:机械小白
2.2建模选项卡介绍(常用)
驱动:包括旋 转驱动、线型 驱动、三向点 驱动。
ADAMS动力学仿真相关培训
单位制、重力加 速度也可以在 Settings中进行设
置
ADAMS动力学仿真相关培训
设置工作目录 制作:机械小白
二.Adams的工作界 面
1.工作区域
2.工具栏
3.选项卡
4.模型各部分、组件的浏览
ADAMS动力学仿真相关培训 制作:机械小白
2.1工作区域
ADAMS动力学仿真相关培训 改变工作区域视图、位置等操作
度。
其他模块:MECHANISM/Pro(Pro/E接口)是连接Pro/E与ADAMS之间的桥梁,
ADAMS/Car(轿车模块)能够快速建造高精度的整车虚拟样机,进行各种试验工
况下整车的动力学响应,ADAMS/Rail(铁道模块),ADAMS/Driver(驾驶员模块)
等模块。
制作:机械小白
1.2.软件界面—2016版
进行振动分析、疲劳分 析等。
进行仿真模拟
制作:机械小白
2.2.1几何创建
1. 长方体
实体几何创建
图框中若打勾 则表示尺寸固 定,反之则可 以在工作区域 通过鼠标拖动 形成三维尺寸。
可以看出决定 长方体的有三 个要素。
ADAMS动力学仿真相关培训
几何创建的附着属性也包括三 个: New Part:独立的几何零件, 无附着点。 On Ground:几何体附着在大地 上。 Add to Part:新的几何体附着 在其他几何上组合成一个新的 几何形状。
可以看出控制圆环的为圆环的内径与外径
ADAMS动力学仿真相关培训
一.ADAMS软件的基本介绍
虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的针对机械系统 运动学与动力学进行仿真分析的商用软件。在当今动力学进行 仿真分析的商用软件。在当今动力学分析软件市场上ADAMS独 占鳌头,拥有70%的市场份额。
模
ADAMS/Solver有各种建模和求解选项,以便精确有效地解决各种工程问题。 ADAMS/Flex(柔性分析模块)提供ADAMS软件与有限元分析软件之间的双向
块
数据交换接口。利用它与ANSYS、MSC/NASTRAN、ABQUS、I-DEAS等软件的接口,
可以方便地考虑零部件的弹性特性,建立多体动力学模型,以提高系统的仿真精
双击模型树中的BOX_1,出现如上对话框,在红框 所示栏中可进行长方体三维尺寸的修改。
双击MARKER_1,可在绿框所示栏中进行几何初始位置的修改 制作:机械小白
2.圆柱体
任意建立 圆柱几何 体。
ADAMS动力学仿真相关培训
可进行圆柱长 度、半径的修 改。
通过调整数值 改变几何的平 滑度,数值越 大,圆形越圆。