DSP在捷联惯性制导技术中的应用
基于DSP的捷联惯导计算机系统的设计与开发
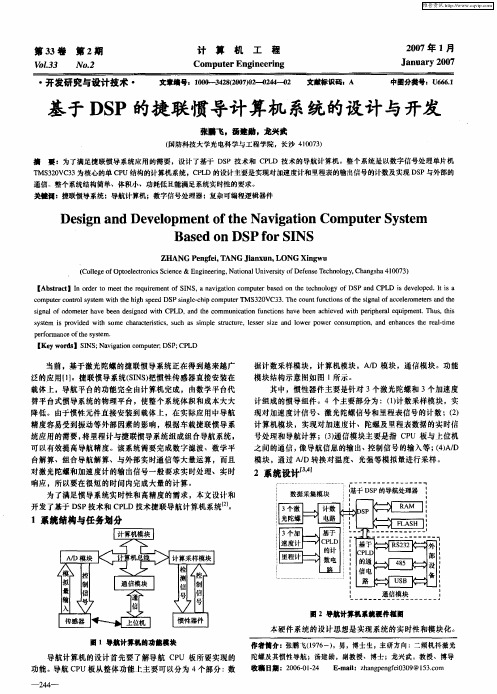
精度容易 受到振动等外部 因素 的影响 ,根据车载捷联惯导 系 统应 用的需要 , 将里程计与捷联惯导系统组成组合导航系统 , 可以有效提高 导航精 度。该 系统需要 完成 数字 滤波、数 学平 台解算、组合导航解算 、与外部实 时通信等大 量运 算,而且 对激光陀螺和加速 度计 的的计算 。 为了满足惯导 系统实 时性 和高精 度的需求 ,本文设 计和
c omp trc nr l yse wi h ihs e d DS sn l h pc ue o to tm t tehg p e P ige c i omp tr s h ue S 2 TM 3 0VC3 Th o n u ci n ftesgn lo c eeomee sa dte 3. ec u tf n to so i a fa c lr h tr n h sg a fo omee v e n d sg e t LD. n h o mu iain fncin a e b e c iv d wi e p ea q ime t in lo d trha e b e e in d wih CP a d tec m nc to u to sh v e n a he e t p r h rle up n.Th s hi h i u .t s
p ro ma c f h y t e r n e o e s sem. f t
[ e od l SN ; a i t n o p t ; S ; P D K y rs I S N v a o m u rD P C L w gi c e
当前 , 基于激 光陀螺的捷联惯导系统正在得到越来越广 泛的应 用… 。捷联惯 导系统( N ) S S把惯性传感器直接安装在 I 载体 上,导航平 台的功能完全 由计算机完成 ,由数 学平 台代
基于MCU与DSP的双机压电捷联惯导系统
基于MCU与DSP的双机压电捷联惯导系统引言近年来,广大科研工作者研究了各种减小压电捷联惯导系统的误差方法,使压电惯性器件的精度得到了极大的提高[1].本文介绍了一种实用的基于DSP实现的压电捷联惯导系统方案。
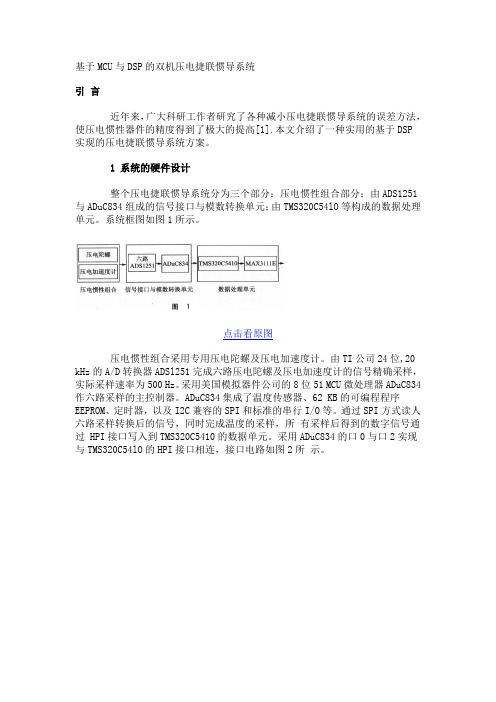
1 系统的硬件设计整个压电捷联惯导系统分为三个部分:压电惯性组合部分;由ADS1251与ADuC834组成的信号接口与模数转换单元;由TMS320C54lO等构成的数据处理单元。
系统框图如图1所示。
点击看原图压电惯性组合采用专用压电陀螺及压电加速度计。
由TI公司24位,20 kHz 的A/D转换器ADSl251完成六路压电陀螺及压电加速度计的信号精确采样,实际采样速率为500 Hz。
采用美国模拟器件公司的8位51 MCU微处理器ADuC834作六路采样的主控制器。
ADuC834集成了温度传感器、62 KB的可编程程序EEPROM、定时器,以及I2C兼容的SPI和标准的串行I/O等。
通过SPI方式读人六路采样转换后的信号,同时完成温度的采样,所有采样后得到的数字信号通过 HPI接口写入到TMS320C5410的数据单元。
采用ADuC834的口0与口2实现与TMS320C54lO的HPI接口相连,接口电路如图2所示。
数据处理单元由TMS320C5410、SST39VF200B及MAX3111E组成。
TMS320C5410是TI公司54系列DSP处理器,外接 10 MHz晶振,通过设置PLL,工作频率在100 MHz,处理能力可达到l00MIPS。
它采用微计算机工作方式(MP/MC引脚接地),外接SST39VF200B作为外接存储器。
系统启动时,由固化在TMS320C5410片内RoM的自举引导程序加载SST39VF200B中的应用程序。
TMS320C5410与ST39VF200B接口如图3所示。
点击看原图TMS320C5410的McBSP0与MAX3111E相连,完成串口数据的输出。
设置McBSP0工作在SPI主动模式,与MAX311lE进行通信。
基于DSP的无陀螺捷联惯导系统设计
维普资讯
2o 。 o8 8
Ap ia i n o CU & P D pl to f c M L
命、 高可靠 性 、 高 过 载 等 。特 别 适 用 于 常 规 陀螺 抗 仪难 以应用 的特定 场合 , 自旋 导 弹 、 能 炮 弹 等 。 如 智
维普资讯
z o4 8 o s  ̄A
繁8 期
胞 子 测 试
Ag 0 u. 0 28
No8 .
基 于 DS P的无 陀螺捷 联原 00 5 ) 3 0 1
( 中北 大学 仪 器科 学与动态 测试 教育部重点实验室
Kew rs D P; pn igP oet e yo cp - e ; ta ~o y od : S S inn rjci ;g rso ef e S rpd wn l r
来组 成捷 联惯 导 的测 量组 合 , 为无 陀 螺捷 联 惯 导 称
0 引
言
系统 (h yo c p resrpd wn iet l a i t eg rso efe ta -o ri v— n an
g t nsse GF I ) 目前 的研 究 发 现无 陀螺 ai ytm, SNS 。 o
用加速度计代替陀螺仪 , 并且从加速度计量测 的比力中解算 出载体的角速度 , 进而只用加速度计
捷 联惯 导 系统适 用 于大 动态 范 围 、 导航 时 间较 短 的
载体的惯性 制导, 优点是 低成本 、 其 低功耗 、 寿 长
A src: i mi o I et lMe s rme tS se (MS p l d t pn ig poete wa btat Ths c n ri au e n y tm I )a pi o s inn rjci s r a e l su id t stehg pno epoet eta esrp d wniet l a iains se cn t de .I i h ih s i ft rjci h tt ta- o ri vg t y tm a — h l h n an o
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种利用惯性测量单元(IMU)来获取和解析导航信息的先进技术。
它以其高精度、高动态性以及全自主工作的特性,在航空、航天、航海、车辆导航等领域中发挥着重要的作用。
本文将深入探讨捷联惯性导航系统的关键技术研究,从系统组成、工作原理、技术难点到解决方案等方面进行详细阐述。
二、系统组成与工作原理捷联惯性导航系统主要由惯性测量单元(IMU)、导航计算机、算法处理软件等部分组成。
其中,IMU是系统的核心,它包括加速度计和陀螺仪,用于实时测量载体在三维空间中的运动状态。
导航计算机则负责采集IMU的数据,通过算法处理软件进行数据解析和处理,最终输出导航信息。
捷联惯性导航系统的工作原理主要依赖于牛顿第二定律和角动量守恒定律。
通过测量载体的加速度和角速度,系统可以推算出载体的运动轨迹和姿态信息,从而实现导航定位。
三、关键技术研究1. 高精度IMU技术研究IMU的精度直接影响到整个系统的导航精度,因此提高IMU 的精度是捷联惯性导航系统的关键技术之一。
当前,研究者们正在通过优化加速度计和陀螺仪的设计和制造工艺,提高其测量精度和稳定性。
此外,采用先进的滤波算法和校准技术,也可以有效提高IMU的精度。
2. 算法优化技术研究算法是捷联惯性导航系统的核心,其优化程度直接影响到系统的性能。
目前,研究者们正在致力于开发更加高效的算法,以实现更快的数据处理速度和更高的导航精度。
同时,针对不同应用场景,如高动态、强干扰等环境,研究者们也在进行相应的算法优化工作。
3. 系统误差校正技术研究由于惯性器件的误差积累和环境干扰等因素的影响,捷联惯性导航系统在长时间工作时会产生较大的误差。
因此,系统误差校正是捷联惯性导航系统的另一个关键技术。
研究者们正在通过建立更加精确的误差模型,采用先进的校正算法和技术手段,对系统误差进行实时校正,以保证系统的导航精度和稳定性。
四、结论捷联惯性导航系统是一种重要的导航技术,具有广泛的应用前景。
《2024年捷联惯性导航系统关键技术研究》范文

《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是现代导航技术的重要组成部分,其利用惯性测量单元(IMU)来感知和计算导航信息,具有自主性强、抗干扰能力强等优点。
随着科技的发展,SINS在军事、民用等领域的应用越来越广泛,对其关键技术的研究也显得尤为重要。
本文将针对捷联惯性导航系统的关键技术进行研究,旨在为相关研究与应用提供参考。
二、SINS基本原理与组成SINS主要由惯性测量单元(IMU)、导航算法和数据处理单元等部分组成。
其中,IMU是SINS的核心部件,包括加速度计和陀螺仪等传感器,用于测量载体的加速度和角速度。
导航算法则根据IMU测量的数据,通过积分运算和坐标变换等手段,实现载体的姿态、速度和位置的解算。
数据处理单元则负责对导航算法输出的数据进行处理和优化,以提高导航精度和稳定性。
三、SINS关键技术研究1. IMU技术研究IMU是SINS的核心部件,其性能直接影响到SINS的导航精度和稳定性。
因此,IMU技术的研究是SINS关键技术之一。
目前,高精度、小型化、低功耗的IMU是研究的重点。
其中,光纤陀螺仪和微机电系统(MEMS)技术的发展,为IMU的小型化和低成本化提供了可能。
此外,为了提高IMU的测量精度和稳定性,还需要研究高性能的传感器技术和信号处理技术。
2. 导航算法研究导航算法是SINS的核心技术之一,其性能直接影响到SINS 的导航精度和实时性。
目前,常用的导航算法包括经典的最小二乘法、卡尔曼滤波算法等。
然而,这些算法在处理复杂环境下的导航问题时,往往存在精度不高、实时性差等问题。
因此,研究更加高效、精确的导航算法是SINS研究的重点。
例如,基于神经网络、深度学习等人工智能技术的导航算法,具有较高的应用潜力。
3. 数据处理与优化技术研究数据处理与优化技术是提高SINS导航精度和稳定性的重要手段。
目前,常用的数据处理技术包括数据滤波、数据融合等。
其中,数据滤波可以消除测量数据中的噪声和干扰,提高数据的信噪比;数据融合则可以将多种传感器数据进行融合,提高导航信息的可靠性和精度。
基于DSP的微型捷联式惯性导航系统的实现

1引言
捷联式惯性 导航 系统(ta — o n Srp d wn I- et l vgt n S s m:I ) 是将惯性 ra iai yt sNs就 i Na o e 敏感 元件直接 固定在载 体上 , 由惯性敏 感元件 测 量载体 相 对惯性 空 间的 三个转 动 角速度 和 沿 载体坐 标 系 的三个 线加 速度分 量 ,经过 计 算, 得到载 体的位置 、 度 、 向和水平姿态 速 航 等 导 航 信 息 ,广 泛 应 用 于 航 海 、航 天 、航 空 领域 ,特别 是军 事领 域… 。它是 一种 先进 的 惯 性 导航 技 术 ,具 有 结构 简 单 , 重量 轻 , 成 本 低 ,可 靠 性 高 等 优 点 。 目前 ,从 实 现 捷 联式 惯性 导航 系统 的手 段来 看 ,国 内多采 用 冯 ・ 伊 曼结构 的通 用 型微处 理 器作为 弹 诺 载 计算 机 ,这 种处 理 器 数据 处 理速 度 较 慢 、 体 积 大 、 功 耗 高 、 电路 复 杂 、可 靠性 低 , 无 法满 足 捷 联 惯导 系统对 微 型化 、高 精 度 、 实 时 性 的 要 求 。 而 基 于 数 字 信 号 处 理 器 ( DSP) 的实 时信 息 处理 系统具 有 高 速 、稳 定 、全数 字化 的特 点 ,它具 有 改进 的哈 佛结 构 、先进 的 多总线 和 多级流 水线 机制 、专 用
基于DSP+MCU的小型捷联惯性导航计算机系统
Th u m i i t r I o p t r s s e a e n DS a d M CU e s b n a u e S NS c m u e y t m b s d o P n
GAO Ya — i JANG Z iy n n bn,I h —o g
完成译码和控制. 通过 D P的 H IE来实现单片机与 D P的数据 交换. S P l S 给出 了系统的硬件 结构框 图和程序 设 计流程图 , 利用本方案 , 于实现军 事和工程领域 中导航 系统微 小型化 、 对 降低系统成本和体积具有重要意义. 关键词 : 捷联惯导 系统 ;S ; P D; S 4 0单 片机 D PC L M P3
术 的不 断进 步 , 导航技 术 向着多 传感 器 、 信息融 合 多
的方 向发展 , 武器 装 备 也 向着 小 型 化 、 性 能 、 可 高 高 靠性 的方 向发展 , 对 导航 计 算 机 提 出 了更 高 的要 这 求. 目前 , 性机 载 、 载 导航 系统 中 , 惯 舰 导航 计算机 大 多 以通 用计算 机 为 平 台 , 系统 体 积 大 、 耗 大 、 其 功 成 本 高 , 法用 于微 小 型应用 场合 . 无 随着 现代 电子技 术 的发展 , 出现 了运 算 能 力 强 大 的数 字 信 号 处 理 器
vn S n n M CU.The DS i an y r s o i l o a a c lu a in a d t e M CU e p n i e f rd t o. i g a DIP a d a P Sm i l e p nsb e frd t a c l t n h o r s o sbl o aa c 1 1 cin a d c n r lo h y t m . Att a i e to n o to ft e s se hes me tme.CPLD o p ee e o i ga d c n r 1 Th aa e c a g e c m lts d c d n n o to . e d t x h n e b — t e h we n t e MCU n h P wa e lz d t r u h H P n ef c fDS a d t e DS s r aie h o g I i tra e o P. Th lc ig a o a d r tu t r e b o k d a r m fh r wa e sr c u e
基于DSP测量的捷联惯导系统设计
Vo .9 1 1
No2 .4
电子 设 计 工 程
E e to i sg g n e i g l cr n c De i n En i e rn
21 0 1年 l 2月
De c.2 1 01
基于 DS P测量 的捷 联惯导 系统设计
郝 鹏 , 建仓 马
S n e t d t h w a a iai n p e i o f t i s se a h e e t e h g a e a d c mmec a a ia in s se O o .T s a a s o s t t n vg t rc s n o h s y t m c iv h ih r t n o h o i r i n vg t y t m l o
1 捷 联 惯 导 系统 硬 件 设计
所 研 制 的 捷 联 惯 导 系 统 主 要 包 括 : 微 惯 性 测 量 单 元 ( MU)信 号 采 集 和 预 处 理 单 元 、 航 解 算 单 元 。 完 整 的捷 MI 、 导 联 惯 导 系 统 如 图 1所 示 。
移 率 , 可 避 免 会 造 成 导 航 积 累误 差 , 此 , 般 商 用 或 者 军 不 因 一
航 系 统 的 精 度 和 性 能 级别 。这 里 选 取 的 M MS陀 螺 仪 为 AD E I 公 司 的 A X S 2 , D R 6 3是 一 款 单 轴 、 成 本 、 能 完 D R 63A X S2 低 功 整 角 速 率 传 感 器 , 敏 度 为 1. mV。 , 量 范 围 为  ̄ 5 。 灵 2 // 测 5 s 10/ s
卡 尔 曼滤 波 和 小波 自适 应 阀 值 降 噪 等 方 法 以提 高 系统性 能 。该 样 机 系统 具 有 体 积 小 功耗 低 、 本 低 、 航 功 能 完 整 、 成 导
基于DSP的微型捷联惯性导航系统设计
s o ha he r s a c s a p i a l h wst tt e e r h i p lc b e. Ke r s:i e ta a i ai n; g r y wo d n riln vg to y o; s li g meho o vn t d; DS P
摘 要 :捷联式惯性 导航 系统是一种先进 的惯性导航技术 ,是近年来惯性技 术的主要 发展方 向之 一 。该文 章介绍 了 基于光纤陀螺 的捷联 惯导系统 的设计 ,相对 于平 台惯 导系统 ,捷联 系统 有很多优 点 ,硬件 简单 ,便于 安装 、维修 和
维护 ,大大 降低 了系统的成本 。但捷联算法运算量大 ,因此需 要用运算速度 高的数字信 号处理器 作为解算 单元 ,可
De i n o t a do sg n S r p- wn ne ta v g to S se s d o P I r ilNa i a in y tm Ba e n DS
HE Ja g a in h i ,GUO Xine g ,XU Ja o g ,Z a fn id n HANG ih n Hus e g
DSP硬件算法在捷联惯性AHRS系统中的实现

DSP硬件算法在捷联惯性AHRS系统中的实现
曾庆化;刘建业;赖际舟;杜亚玲
【期刊名称】《中国惯性技术学报》
【年(卷),期】2006(014)006
【摘要】在利用基于DSP TMS3205416的导航计算机实现捷联惯性航姿参考系统(AHRS)过程中,为充分利用系统硬件资源,实现AHRS系统最优化,针对该DSP硬件系统的特点,优化设计了低阶卡尔曼滤波器算法,并提出了改进导航系统精度的三量分解法(TSA),解决了因DSP位数和相关支持软件的局限而造成的导航系统精度不足的问题.这两种基于DSP的硬件算法的有机融合,可靠有效,对实现工程DSP系统有重要参考价值.
【总页数】4页(P1-4)
【作者】曾庆化;刘建业;赖际舟;杜亚玲
【作者单位】南京航空航天大学,导航研究中心,南京,210016;南京航空航天大学,导航研究中心,南京,210016;南京航空航天大学,导航研究中心,南京,210016;南京航空航天大学,导航研究中心,南京,210016
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.基于DSP+MCU的小型捷联惯性导航计算机系统 [J], 高延滨;蒋智勇
2.船用捷联惯性导航系统惯性系快速对准算法 [J], 柴永利;张鑫;章波
3.基于DSP的微型捷联惯性导航系统设计 [J], 何江海;郭宪锋;许家栋;张会生
4.机载捷联惯性导航系统算法实现与仿真 [J], 朱建东;于林韬;车明阳
5.基于DSP56F807的捷联惯性导航系统设计 [J], 何清华;杨敏;贺继林;王北战因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种基于惯性测量单元(IMU)的导航技术,其通过测量物体的加速度和角速度信息,结合数字积分算法,实现对物体运动状态的精确估计和导航。
SINS具有高精度、抗干扰能力强、无需外部辅助等优点,在军事、航空、航天、航海等领域具有广泛的应用前景。
本文将重点研究捷联惯性导航系统的关键技术,包括传感器技术、算法技术以及系统集成技术。
二、传感器技术研究1. 陀螺仪技术陀螺仪是SINS的核心部件之一,其性能直接影响到整个系统的精度和稳定性。
目前,常用的陀螺仪包括机械陀螺、光学陀螺和微机电系统(MEMS)陀螺等。
其中,MEMS陀螺因其体积小、重量轻、成本低等优点,在SINS中得到了广泛应用。
然而,MEMS陀螺的精度和稳定性仍需进一步提高。
因此,研究高性能的MEMS陀螺制造技术和材料,以及优化其工作原理和结构,是提高SINS性能的关键。
2. 加速度计技术加速度计是SINS的另一个重要传感器,其测量精度和稳定性对SINS的导航性能有着重要影响。
目前,常用的加速度计包括压阻式、电容式和压电式等。
为了提高加速度计的测量精度和稳定性,需要研究新型的加速度计制造技术和材料,以及优化其电路设计和信号处理算法。
三、算法技术研究1. 姿态解算算法姿态解算算法是SINS的核心算法之一,其目的是通过陀螺仪和加速度计的测量数据,计算出物体的姿态信息。
目前常用的姿态解算算法包括欧拉角法、四元数法和卡尔曼滤波法等。
为了提高算法的精度和实时性,需要研究新型的姿态解算算法,如基于机器学习的姿态解算方法等。
2. 误差补偿算法由于传感器自身的误差和外部环境的影响,SINS在运行过程中会产生误差。
为了减小误差对系统性能的影响,需要研究误差补偿算法。
目前常用的误差补偿算法包括基于模型的方法和基于数据的自适应补偿方法等。
研究新型的误差补偿算法和技术手段是提高SINS性能的重要方向。
四、系统集成技术研究1. 数据融合技术数据融合技术是将来自不同传感器的数据信息融合起来,以提高导航系统的整体性能。
基于DSP的捷联惯性导航系统的设计的开题报告
基于DSP的捷联惯性导航系统的设计的开题报告一、毕业设计的背景与意义随着现代航空和航天技术的发展,惯性导航系统在航空和航天领域中得到了广泛应用。
惯性导航系统已经成为现代舰船、飞机、导弹等航空航天器的核心部件。
惯性导航系统能够在无GPS信号的情况下,利用加速度计和陀螺仪等传感器测量飞行器的运动状态,提供准确的位置、速度和姿态信息。
在惯性导航系统中,特别是捷联惯性导航系统中,数字信号处理技术已经成为必不可少的一部分。
基于数字信号处理的捷联惯性导航系统可以更加精确地测量飞行器运动状态,实现更高的导航精度。
本毕设旨在设计一个基于DSP的捷联惯性导航系统。
通过图像处理和数字滤波算法对传感器采集到的数据进行处理,提高惯性导航系统的测量精度。
二、毕业设计的内容与目标本毕设的具体内容包括:1. 了解捷联惯性导航系统的工作原理和原理;2. 选取合适的传感器,设计硬件系统,完成数据采集;3. 基于数字信号处理技术设计系统的数据处理算法,通过数字滤波、卡尔曼滤波等方法提高系统的测量精度;4. 利用Matlab对捷联惯性导航系统进行仿真分析,测试系统的性能;5. 实际测试捷联惯性导航系统的性能;6. 完成论文写作。
本毕设的主要目标是:设计并实现一个基于DSP的捷联惯性导航系统,该系统能够稳定可靠地测量飞行器的运动状态和位置信息,在一定程度上提高导航精度。
三、毕业设计的技术路线及方案本毕设的技术路线主要包括以下几个方面:1. 硬件设计根据捷联惯性导航系统的原理,选取合适的加速度计和陀螺仪等传感器,设计硬件系统,完成数据采集。
硬件系统的设计需要考虑传感器的性能、大量数据的传输等问题。
2. 软件设计基于DSP的数字信号处理技术设计系统的数据处理算法,通过数字滤波、卡尔曼滤波等方法提高系统的测量精度。
软件设计需要考虑算法的性能和精度等问题。
3. 系统仿真利用学习的Matlab工具对捷联惯性导航系统进行仿真分析,测试系统的性能,掌握捷联惯性导航系统的性能分析方法与仿真技术。
基于DSP的微型捷联惯导系统设计
基于DSP的微型捷联惯导系统设计
刘瑞华
【期刊名称】《航天控制》
【年(卷),期】2005(23)4
【摘要】主要讨论微小型惯性导航系统的工程设计问题。
以微机电惯性测量元件(MEMS-IMU)为惯性传感器,以数字信号处理器(DSP)为核心作为导航计算机,设计构造了一种微小型捷联惯性导航系统。
给出了系统的硬件结构框图和程序设计流程图,并讨论了DSP软件设计和调试中的一些问题。
利用本方案,对于实现军事和工程领域中导航系统微小型化、降低系统成本和体积具有重要意义。
【总页数】4页(P24-26)
【关键词】数字信号处理器;微机电系统;捷联惯性导航系统
【作者】刘瑞华
【作者单位】中国民航学院智能信号与图像处理天津市重点实验室
【正文语种】中文
【中图分类】TJ765
【相关文献】
1.基于DSP的无陀螺捷联惯导系统设计 [J], 赵倩;马铁华;范锦彪
2.基于DSP测量的捷联惯导系统设计 [J], 郝鹏;马建仓
3.基于DSP的光纤捷联惯导系统设计与实现 [J], 王凯;赵忠;吴坤民
4.基于FPGA/DSP的捷联惯导系统设计 [J], 彭荆明;徐良波;舒旭光
5.基于DSP的捷联惯导系统设计 [J], 牛海燕;汪渤
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的光纤捷联惯导系统设计与实现
基于DSP的光纤捷联惯导系统设计与实现
王凯;赵忠;吴坤民
【期刊名称】《计算机测量与控制》
【年(卷),期】2009(017)001
【摘要】介绍了一种基于DSP的光纤陀螺捷联惯导系统的设计与实现方法;系统采用DSP+MCU的体系结构,DSP主要完成导航计算,利用单片机实现对数据采集模块的控制,并通过双口RAM实现单片机和DSP的数据通信,构成了一套小型捷联惯导系统.同时给出了一种捷联惯导算法编排,简要介绍了SPI通信和TMS320C6713的二次bootloder方式;经测试,系统速度和精度都满足了设计要求,已应用于实际系统.
【总页数】3页(P177-179)
【作者】王凯;赵忠;吴坤民
【作者单位】西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP316.2
【相关文献】
1.基于DSP的光纤陀螺捷联惯导系统的设计 [J], 杨兴光;李绪友;丛丽
2.基于DSP的无陀螺捷联惯导系统设计 [J], 赵倩;马铁华;范锦彪
3.基于DSP测量的捷联惯导系统设计 [J], 郝鹏;马建仓
4.光纤陀螺捷联惯导系统中数据采集单元的设计与实现 [J], 赵亮;缪玲娟;沈军
5.基于DSP的捷联惯导系统组合初始对准算法设计 [J], 王智;覃方君;黄春福因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP+MCU的小型捷联惯性导航计算机系统
基于DSP+MCU的小型捷联惯性导航计算机系统杜亚玲;刘建业;曾庆化;赖际舟【期刊名称】《系统工程与电子技术》【年(卷),期】2005(27)8【摘要】针对通用计算机不能满足捷联惯性航姿系统小型化的要求,介绍了自行研发的基于双CPU的专用导航计算机.并以该计算机为平台,利用低成本IMU等传感器,构成了小型捷联惯性航姿系统.针对该惯性航姿系统的特点,简化了磁航向补偿算法、应用了低阶卡尔曼滤波器.针对导航计算机"数字信号处理器(DSP)+单片机(MCU)"的特殊结构,设计了合理的导航程序流程.实验证明:基于DSP+MCU的小型捷联惯性航姿系统实时性好,精度可达到要求,而且大大减小了系统体积和功率,降低了成本.【总页数】4页(P1452-1455)【作者】杜亚玲;刘建业;曾庆化;赖际舟【作者单位】南京航空航天大学自动化学院导航研究中心,江苏,南京,210016;南京航空航天大学自动化学院导航研究中心,江苏,南京,210016;南京航空航天大学自动化学院导航研究中心,江苏,南京,210016;南京航空航天大学自动化学院导航研究中心,江苏,南京,210016【正文语种】中文【中图分类】V249.32【相关文献】1.基于DSP+MCU的小型捷联惯性导航计算机系统 [J], 高延滨;蒋智勇2.基于捷联惯性导航系统姿态实时性的研究 [J], 王建中3.基于MATLAB组件GUI的捷联惯性导航系统教学仿真平台设计 [J], 周雪梅;许德新;张晓宇;郭立东4.基于捷联惯性导航的煤矿监察执法系统设计与应用 [J], 刘梅华;苗可彬5.基于捷联惯性导航的矿用单轨吊机车定位算法 [J], 郭梁;宋建成;宁振兵;王明勇;吝伶艳;黄健琦因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSP在捷联惯性制导技术中的应用
捷联惯性制导是随着计算机技术的进展而进展起来的惯性制导技术,因为它是用一个数学平台来代替平台式惯性制导系统中的陀螺稳定平台,因而具有成本低、结构容易、体积小、牢靠性高等优点。
但正是因为没有稳定平台,其惯性器件的测量值就不能挺直用于导航计算,而必需先经过复杂的数学变换把其变为符合导航计算要求的值,这样捷联惯性制导在计算上非常复杂,同时对计算装置的性能也提出了很高的要求。
2捷联惯性制导的工作原理
因为去掉了稳定平台,捷联惯性制导将惯性器件挺直固联于弹体上。
这样,其惯性器件所测得的值便是沿弹体坐标系轴向的测量值。
因为弹体坐标系是运动坐标系,而导航计算是以参考坐标系(导航坐标系)为参照来确定弹的位置、速度、姿势等运动参数的。
因此,弹体坐标系下的测量值不能挺直用于导航计算,而必需先对它们举行变换,以将其变换到导航坐标系,然后再举行导航计算。
详细的变换会因所选的参考坐标系的不同而有所不同,其基本过程如下:
(1)计算机按照陀螺的输出计算出姿势角;
(2)按照姿势角参数,确定用来举行坐标变换的方向余弦矩阵;(3)把弹体坐标系下的加速度用方向余弦矩阵变换到导航坐标系下;(4)按照相应的力学编排方程算出弹体的即时速度、位置等制导参数。
图1所示是一个捷联惯性制导的工作原理暗示图。
该系统的坐标系变换过程需要举行大量的矩阵运算,而变换后的导航计算主要是积分运算。
因此,从计算方面来看,捷联惯性制导在计算上是很复杂的,没有相当的硬件支持是无法实现的。
但从其它方面来看,省掉稳定平台又使得捷联惯性制导系统具有结构容易,牢靠性高,简单创造,体积小,分量轻,成本低等特点。
所以,捷联惯性制导利用数学技术实现了系统结构的简化,并由此带来了工程技术上的优越性。
因此,小型战术制导武器系统很适合采纳这种技术。
第1页共5页。