在直角坐标系中表示角
空间直角坐标系

长度:使用直角坐标 系中的坐标值计算
面积:使用直角坐标 系中的坐标值计算
体积:使用直角坐标 系中的坐标值计算
角度:使用直角坐标 系中的坐标值计算
距离:使用直角坐标 系中的坐标值计算
相似性:使用直角坐 标系中的坐标值计算
平移:沿某个方向移动一定距 离不改变形状的大小和方向
旋转:绕某个轴旋转一定角 度改变形状的位置和方向
向量的坐标表示应用:向量的坐标表示方法在物理、工程、计算机科学等领域有着广泛的应 用。
向量的模:向量的长度表示为向量的平方和的平方根
向量的数量积:两个向量的点积表示为两个向量的坐标乘积的和
向量的坐标表示方法:用三个坐标值表示向量每个坐标值对应一个坐标轴
向量的数量积的坐标表示方法:用两个向量的坐标乘积的和表示向量的数量积每个坐标乘积 对应一个坐标轴
平移:沿坐标轴方 向移动保持原点位 置不变
旋转和平移的复合 :先旋转后平移或 先平移后旋转
旋转和平移的逆操 作:旋转和平移的 逆操作可以恢复原 坐标系
空间直角坐标系的 表示方法
空间直角坐标 系:由三个互 相垂直的坐标 轴组成通常用x、
y、z表示
点的坐标表示: 用三个数字表 示分别对应x、 y、z轴上的坐
感谢您的观看
汇报人:
示。
单位长度:平面直角坐标系中 的单位长度是固定的通常用1表
示。
空间直角坐标系是 三维的平面直角坐 标系是二维的
空间直角坐标系中的点 可以用三个坐标表示平 面直角坐标系中的点可 以用两个坐标表示
空间直角坐标系中 的点可以通过投影 变换转换为平面直 角坐标系中的点
平面直角坐标系中 的点可以通过升维 变换转换为空间直 角坐标系中的点
坐标轴:x轴、y轴、z 轴分别代表三个方向 的坐标。
直角坐标系转化为球坐标系矢量
直角坐标系转化为球坐标系矢量直角坐标系和球坐标系是两种常用的坐标系,它们分别适用于不同的几何问题。
在某些情况下,我们需要将直角坐标系中的矢量转化为球坐标系下的表示,以便于进行分析和计算。
本文将介绍直角坐标系向球坐标系的转换方法。
1. 直角坐标系和球坐标系的定义直角坐标系是三维空间中最常见的坐标系,其中一个点的位置可以由三个坐标值表示,分别表示在x轴、y轴和z轴上的投影距离。
球坐标系则以原点为起点,通过径向距离、方位角和极角来描述一个点的位置。
径向距离表示点到原点的距离,方位角表示点在x-y平面上的角度(通常用弧度表示),而极角表示点与z轴的夹角(同样以弧度表示)。
2. 直角坐标系到球坐标系的转换方法要将直角坐标系下的矢量转换为球坐标系下的表示,我们需要通过一些数学公式进行计算。
假设我们有一个直角坐标系下的矢量V(x, y, z),我们希望将其表示为球坐标系下的矢量V(r, θ, φ)。
下面是具体的转换方法:2.1 求解径向距离(r)径向距离表示点到原点的距离,可以通过以下公式计算:r = √(x^2 + y^2 + z^2)其中 x, y, z 分别表示直角坐标系下的矢量的三个分量。
2.2 求解方位角(θ)方位角表示点在x-y平面上的角度,可以通过以下公式计算:θ = arctan(y / x)其中 arctan 是反正切函数。
注意,在计算方位角时需要考虑特殊情况。
当 x = 0 时,方位角θ 为π/2 或3π/2,取决于 y 的正负。
当 x = 0 且 y = 0 时,方位角θ 可以取任意值。
2.3 求解极角(φ)极角表示点与z轴的夹角,可以通过以下公式计算:φ = arccos(z / r)其中 arccos 是反余弦函数。
2.4 得到球坐标系下的矢量(r, θ, φ)通过以上计算得到径向距离 r、方位角θ 和极角φ,我们就可以表示直角坐标系下的矢量 V(x, y, z) 为球坐标系下的矢量V(r, θ, φ)。
空间向量的坐标表示与几何应用

空间向量的坐标表示与几何应用在三维空间中,空间向量是研究物体运动和位置的重要工具。
为了准确地描述和计算空间向量,我们需要用坐标来表示它们。
本文将详细介绍空间向量的坐标表示方法,并探讨其在几何应用中的重要性。
一、坐标表示方法1. 直角坐标系直角坐标系是最常用的表示空间向量的方法。
在直角坐标系中,我们以三个相互垂直的坐标轴为基准,分别表示x、y、z三个方向。
一个空间向量可以通过三个坐标值(x,y,z)来表示,分别表示它在x轴、y 轴和z轴上的投影长度。
例如,对于一个空间向量v,在直角坐标系中,我们可以表示为v=(x,y,z)。
2. 球坐标系球坐标系是另一种表示空间向量的方法,它是通过一个原点、一个偏离原点的距离、一个与z轴的夹角和一个与x轴的投影角来确定一个空间向量的位置。
在球坐标系中,一个空间向量的坐标通常表示为(r,θ,φ),其中r表示向量到原点的距离,θ表示向量与z轴的夹角,φ表示向量在x-y平面上的投影与x轴的夹角。
二、坐标表示的几何应用1. 向量的加法与减法通过坐标表示,我们可以方便地对空间向量进行加法与减法运算。
只需将对应坐标相加或相减即可得到结果。
例如,对于向量v=(x1,y1,z1)和向量w=(x2,y2,z2),它们的和可以表示为v+w=(x1+x2,y1+y2,z1+z2)。
2. 向量的数量积与夹角坐标表示还可以用于计算向量的数量积和夹角。
向量的数量积可以通过坐标之间的乘积运算得到。
例如,对于向量v=(x1,y1,z1)和向量w=(x2,y2,z2),它们的数量积可以表示为v·w=x1x2+y1y2+z1z2。
夹角可以通过向量的数量积公式求解:cosθ = (v·w) / (|v| |w|)其中,|v|和|w|分别表示向量v和w的模长。
3. 点与直线的相对位置通过点和直线的坐标表示,我们可以判断一个点与直线的相对位置关系。
以直线的方程和点的坐标为基础,我们可以计算点到直线的距离,从而判断点在直线上方、下方还是与直线相交。
点的坐标的知识点总结
点的坐标的知识点总结一、概念点是几何中最基本的元素之一,它是没有大小和形状的,只有位置的概念。
在平面几何中,一个点的位置可以由其和参考坐标系中的两个坐标值来确定。
这两个坐标值分别叫做横坐标和纵坐标,通常用小括号分别括起来,中间用逗号隔开表示。
例如,点A的坐标为(x,y)。
其中,x是横坐标,y是纵坐标。
横坐标表示点在x轴上的位置,纵坐标表示点在y轴上的位置。
二、表示方法在平面直角坐标系中,点的位置是由两个坐标值确定的。
横坐标和纵坐标的取值范围可以是实数,也可以是整数,具体取决于所使用的坐标系和具体问题的要求。
通常,我们可以使用平面直角坐标系、极坐标系和球面坐标系来表示点的位置。
1、平面直角坐标系:平面直角坐标系是最常用的表示点的坐标的方法之一。
在平面直角坐标系中,x轴和y轴互相垂直,起始于原点O,并且正方向分别被定义为正的方向。
点的坐标表示为(x,y),其中x是点在x轴上的投影,y是点在y轴上的投影。
2、极坐标系:极坐标系是另一种表示点的坐标的方法。
在极坐标系中,点的位置不是由横纵坐标确定,而是由极径和极角确定。
极径表示点到坐标原点的距离,极角表示点在极轴上的极角。
点的坐标表示为(r,θ),其中r是点到原点的距离,θ是点在极轴上的极角。
3、球面坐标系:球面坐标系用来描述三维空间中点的位置。
在球面坐标系中,点的坐标表示为(r,θ,φ),其中r是点到原点的距离,θ是点在xz平面上的极角,φ是点与z轴的夹角。
球面坐标系能够描述点在球面上的位置,适用于球面上的问题。
三、坐标系坐标系是用来描述点的位置的基础工具之一。
在平面几何中,常用的坐标系包括直角坐标系、极坐标系和其他特殊的坐标系。
每种坐标系都有其独特的特点和适用范围。
1、直角坐标系:直角坐标系是最基本,也是最常用的坐标系。
在直角坐标系中,点的位置是由横坐标和纵坐标表示的。
横坐标和纵坐标的取值范围都是实数。
直角坐标系可以用于描述平面上的点的位置,以及平面上的图形和问题。
平面直角坐标系平面直角坐标系

在有些情况下,1个单位长度表示的单位量可能 不是1,需要具体问题具体分析。)
3
特点
坐标轴上的单位长度是等长的,即1个单位长度 上对应的坐标值是等距的。
象限与八分区
• 象限:将平面分成四个区域,左上、右上、左下、右下分别称为第一、第二、第三、第四象限。 • 八分区:将平面分成八个区域,类似于象限的划分方法,但是增加了两条坐标轴上的奇数和偶数分区。具
平面直角坐标系的优化算法
平面直角坐标系也可以用于解决优化问题,例如线 性规划、非线性规划等。
线性规划问题可以定义一个目标函数和一组约束条 件,通过求解目标函数的最大值或最小值,以及满
足约束条件的最优解得到最优解。
非线性规划问题可以定义一个非线性目标函数和 一组约束条件,通过求解目标函数的最小值或最 大值,以及满足约束条件的最优解得到最优解。
特点
平面直角坐标系具有简单易行、直观形象、易于理解与运用 等优点。
平面直角坐标系的重要性
数学科学的基础
平面直角坐标系是数学科学中最为基础和重要的概念之一,它为代数、几何 、分析等多个分支提供了桥梁和工具。
解决实际问题
平面直角坐标系广泛应用于各个领域,如物理学、工程学、经济学等,用于 描述和分析实际问题。
体如下 • 第一象限:(+,+) • 第二象限:(-,+) • 第三象限:(-,-) • 第四象限:(+,-) • x轴正半轴:(+,0) • x轴负半轴:(0,-) • y轴正半轴:(0,+) • y轴负半轴:(-,0)
03
平面直角坐标系的应用
描述点的位置
平面直角坐标系由横轴和纵轴构成,原点表示为 (0,0),可以在此基础上确定任意点的位置。
(完整版)平面直角坐标系知识点总结

平面直角坐标系二、知识要点梳理知识点一:有序数对比如教室中座位的位置,常用“几排几列”来表示,而排数和列数的先后顺序影响座位的位置,因此用有顺序的两个数a与b组成有序数时,记作(a,b),表示一个物体的位置。
我们把这种有顺序的两个数a与b组成的数对叫做有序数对,记作: (a,b).要点诠释:对“有序”要准确理解,即两个数的位置不能随意交换,(a,b)与(b,a)顺序不同,含义就不同,表示不同位置。
知识点二:平面直角坐标系以及坐标的概念1.平面直角坐标系在平面内画两条互相垂直、原点重合的数轴就组成平面直角坐标系。
水平的数轴称为x 轴或横轴,习惯上取向右为正方向;竖直的数轴称为y轴或纵轴,取向上方向为正方向,两坐标轴的交点为平面直角坐标系的原点(如图1)。
注:我们在画直角坐标系时,要注意两坐标轴是互相垂直的,且有公共原点,通常取向右与向上的方向分别为两坐标轴的正方向。
平面直角坐标系是由两条互相垂直且有公共原点的数轴组成的。
2.点的坐标点的坐标是在平面直角坐标系中确定点的位置的主要表示方法,是今后研究函数的基础。
在平面直角坐标系中,要想表示一个点的具体位置,就要用它的坐标来表示,要想写出一个点的坐标,应过这个点A分别向x轴和y轴作垂线,垂足M在x轴上的坐标是a,垂足N在y轴上的坐标是b,我们说点A的横坐标是a,纵坐标是b,那么有序数对(a,b)叫做点A的坐标.记作:A(a,b).用(a,b)来表示,需要注意的是必须把横坐标写在纵坐标前面,所以这是一对有序数。
注:①写点的坐标时,横坐标写在前面,纵坐标写在后面。
横、纵坐标的位置不能颠倒。
②由点的坐标的意义可知:点P(a,b)中,|a|表示点到y轴的距离;|b|表示点到x轴的距离。
知识点三:点坐标的特征l.四个象限内点坐标的特征:两条坐标轴将平面分成4个区域称为象限,按逆时针顺序分别叫做第一、二、三、四象限,如图2.这四个象限的点的坐标符号分别是(+,+),(-,+),(-,-),(+,-).2.数轴上点坐标的特征:x轴上的点的纵坐标为0,可表示为(a,0);y轴上的点的横坐标为0,可表示为(0,b).注意:x轴,y轴上的点不在任何一个象限内,对于坐标平面内任意一个点,不在这四个象限内,就在坐标轴上。
空间直角坐标系与球坐标系的转换方法

空间直角坐标系与球坐标系的转换方法简介空间直角坐标系和球坐标系是数学中常用的两种表示空间中点的坐标系。
本文将介绍这两种坐标系之间的转换方法,帮助读者更好地理解它们之间的关系。
空间直角坐标系空间直角坐标系是三维空间中最常见的坐标系,通常用三个坐标轴来表示空间中的点。
假设三个坐标轴分别为x轴、y轴和z轴,一个点在直角坐标系中的坐标可以表示为(x, y, z)。
球坐标系球坐标系是另一种常用的坐标系,它使用点到坐标系原点的距离、点在xy平面上的投影到x轴的角度和点在xz平面上的投影到z轴的角度来表示点的位置。
一个点在球坐标系中的坐标通常表示为(r, θ, φ),其中r是点到原点的距离,θ是点在xy平面上的极角,φ是点在xz平面上的极角。
直角坐标系到球坐标系的转换将一个点的直角坐标系坐标(x, y, z)转换为球坐标系坐标(r, θ, φ)的过程比较简单。
首先可以计算点到原点的距离r: $r = \\sqrt{x^2 + y^2 + z^2}$然后,可以计算极角θ: $θ = \\arctan(\\frac{y}{x})$最后,计算极角φ:$φ = \\arccos(\\frac{z}{r})$球坐标系到直角坐标系的转换如果已知一个点在球坐标系中的坐标(r, θ, φ),要将其转换为直角坐标系中的坐标(x, y, z)也是可行的。
转换公式如下: $x = r \\cdot \\sin(θ) \\cdot \\cos(φ)$ $y = r \\cdot \\sin(θ) \\cdot \\sin(φ)$ $z = r \\cdot \\cos(θ)$通过这些公式,我们可以方便地在空间直角坐标系和球坐标系之间进行坐标转换,从而更灵活地描述和计算空间中的点的位置。
结论空间直角坐标系和球坐标系是表示空间中点的两种常用方法,它们之间存在简单的转换关系。
这种转换关系在数学和物理等领域有着广泛的应用,帮助人们更好地理解和描述空间中的事物。
角的概念的推广——任意角

(二)角的分类:
正角:按逆时针方向旋转所形成的角. 2100 如α=210º.
负角:按顺时针方向旋转所形成的角.
如α=-150º.
-1500
零角:没有作任何旋转的角.记作α=0º.
角的概念推广后,它包括任意大小的正角、负角 和零角
注意
⑴在不引起混淆的情况下,“角 ” 或“∠ ”可以简化成“ ”;
90°+k∙360° y x 0
270°+k∙360°
S1={β|β=90°+k∙360°,k∈Z} ={β| β=90°+2k·180°,k∈Z}
终边落在y轴负半轴上的角的集合为 S2={β| β=270°+k∙360°,k∈Z} ={β| β=90°+(2k+1) ·180° ,k∈Z}
∴终边落在y轴上的角的集合为 S=S1∪S2 ={β| β=90°+n∙180° ,n∈Z}
00 3600 k 900 3600 k k Z
第二象限角的表示方法:
900 3600 k 1800 3600 k k Z
第三象限角的表示方法:
1800 3600 k 2700 3600 k k Z
第四象限角表示方法:
2700 3600 k 3600 3600 k k Z
◆
10、很多事情努力了未必有结果,但是不努力却什么改变也没有。。09:29:5509:29:5509:291/5/2022 9:29:55 AM
◆
11、成功就是日复一日那一点点小小努力的积累。。22.1.509:29:5509:29Jan-225-Jan-22
◆
12、世间成事,不求其绝对圆满,留一份不足,可得无限完美。。09:29:5509:29:5509:29Wednesday, January 05, 2022
空间各种直角坐标系
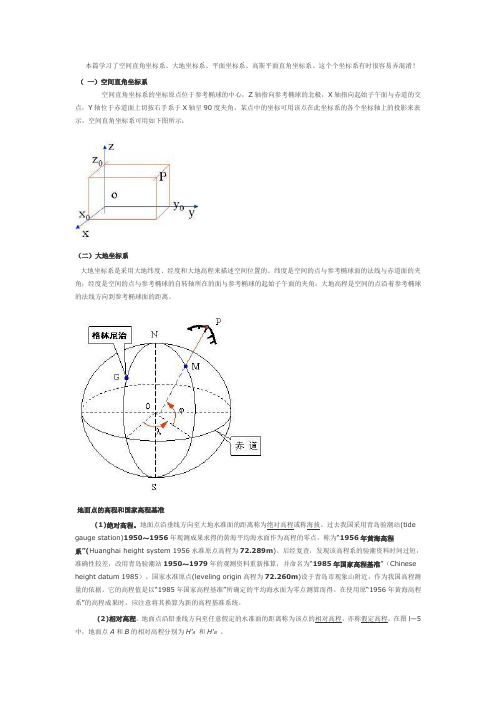
本篇学习了空间直角坐标系、大地坐标系、平面坐标系、高斯平面直角坐标系。
这个个坐标系有时很容易弄混淆!(一)空间直角坐标系空间直角坐标系的坐标原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上切按右手系于X轴呈90度夹角,某点中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用如下图所示:(二)大地坐标系大地坐标系是采用大地纬度、经度和大地高程来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高程是空间的点沿着参考椭球的法线方向到参考椭球面的距离。
地面点的高程和国家高程基准(1)绝对高程。
地面点沿垂线方向至大地水准面的距离称为绝对高程或称海拔。
过去我国采用青岛验潮站(tide gauge station)1950~1956年观测成果求得的黄海平均海水面作为高程的零点,称为“1956年黄海高程系”(Huanghai height system1956水准原点高程为72.289m)。
后经复查,发现该高程系的验潮资料时间过短,准确性较差,改用青岛验潮站1950~1979年的观测资料重新推算,并命名为“1985年国家高程基准”(Chinese height datum 1985)。
国家水准原点(leveling origin高程为72.260m)设于青岛市观象山附近,作为我国高程测量的依据。
它的高程值是以“1985年国家高程基准”所确定的平均海水面为零点测算而得。
在使用原“1956年黄海高程系”的高程成果时,应注意将其换算为新的高程基准系统。
(2)相对高程。
地面点沿铅垂线方向至任意假定的水准面的距离称为该点的相对高程,亦称假定高程。
在图l—5中,地面点A和B的相对高程分别为H'A和H'B。
(3)高差。
地面上任意两点的高程(绝对高程或相对高程)之差称为高差。
平面直角坐标系平行四边形对角线公式

平面直角坐标系平行四边形对角线公式摘要:一、引言二、平面直角坐标系的定义三、平行四边形的性质四、对角线公式推导五、公式应用及结论正文:一、引言在平面几何中,平面直角坐标系是一个基本的概念,它由横坐标和纵坐标组成。
平行四边形是平面几何中一种特殊的四边形,其对角线具有特殊的性质。
本文将介绍平面直角坐标系平行四边形对角线公式及其应用。
二、平面直角坐标系的定义平面直角坐标系是一个由横坐标和纵坐标组成的直角坐标系,通常以x 轴和y 轴表示。
坐标系的原点称为坐标原点,横坐标表示点在x 轴上的位置,纵坐标表示点在y 轴上的位置。
三、平行四边形的性质平行四边形是一个四边形,其中对边两两平行。
平行四边形的对角线具有以下性质:1.对角线互相平分;2.对角线交点将四边形分成两个全等三角形。
四、对角线公式推导假设平行四边形的四个顶点分别为A(x1, y1)、B(x2, y1)、C(x2, y2) 和D(x1, y2),对角线AC 和BD 相交于点E。
根据向量运算,可以得到:AC = (x2 - x1, y2 - y1)BD = (x2 - x1, y2 - y1)由于AC = BD,所以有:x2 - x1 = x2 - x1y2 - y1 = y2 - y1五、公式应用及结论平面直角坐标系平行四边形对角线公式可以用于计算平行四边形的对角线长度、交点坐标等。
通过以上推导,我们可以发现,平行四边形的对角线具有互相平分和交点将四边形分成两个全等三角形的性质。
这些性质在解决一些平面几何问题时非常有用。
总之,平面直角坐标系平行四边形对角线公式是一个基本的几何公式,掌握它有助于解决平面几何问题。
直角坐标系中平行四边形对角线法则
直角坐标系中平行四边形对角线法则
摘要:
一、引言
二、直角坐标系与平行四边形的概念
三、平行四边形对角线法则的定义与性质
四、平行四边形对角线法则的应用
五、结论
正文:
一、引言
在数学中,直角坐标系和平行四边形是两个重要的基本概念。
本文将介绍直角坐标系中平行四边形对角线法则的相关知识。
二、直角坐标系与平行四边形的概念
1.直角坐标系:在平面内,以横轴和纵轴建立直角坐标系,用有序实数对表示平面上的点。
2.平行四边形:在平面上,有两对平行的边的四边形称为平行四边形。
三、平行四边形对角线法则的定义与性质
1.定义:平行四边形的对角线法则是指,在直角坐标系中,平行四边形的两条对角线所代表的向量相等。
2.性质:对角线相交于中点,对角线长度相等,对角线互相平分。
四、平行四边形对角线法则的应用
1.向量计算:利用对角线法则,可以简化向量的计算过程。
2.图形变换:在计算机图形学中,可以利用对角线法则实现图形的平移、旋转等变换。
3.问题求解:在解决实际问题时,可以利用对角线法则快速求解。
五、结论
通过本文的介绍,相信大家对直角坐标系中平行四边形对角线法则有了更深入的了解。
三角函数与坐标系的关系
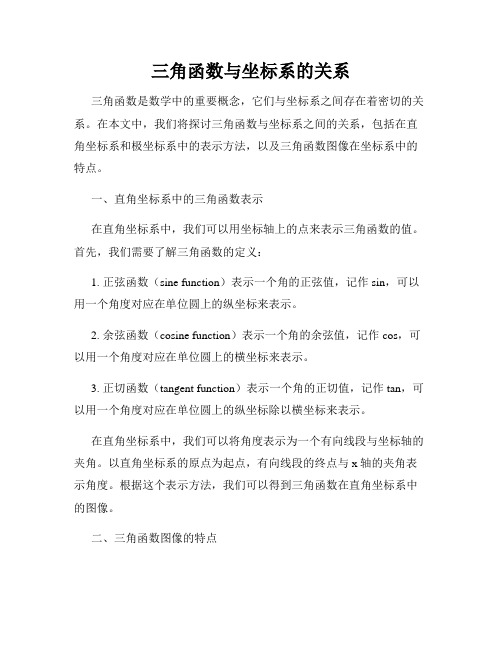
三角函数与坐标系的关系三角函数是数学中的重要概念,它们与坐标系之间存在着密切的关系。
在本文中,我们将探讨三角函数与坐标系之间的关系,包括在直角坐标系和极坐标系中的表示方法,以及三角函数图像在坐标系中的特点。
一、直角坐标系中的三角函数表示在直角坐标系中,我们可以用坐标轴上的点来表示三角函数的值。
首先,我们需要了解三角函数的定义:1. 正弦函数(sine function)表示一个角的正弦值,记作sin,可以用一个角度对应在单位圆上的纵坐标来表示。
2. 余弦函数(cosine function)表示一个角的余弦值,记作cos,可以用一个角度对应在单位圆上的横坐标来表示。
3. 正切函数(tangent function)表示一个角的正切值,记作tan,可以用一个角度对应在单位圆上的纵坐标除以横坐标来表示。
在直角坐标系中,我们可以将角度表示为一个有向线段与坐标轴的夹角。
以直角坐标系的原点为起点,有向线段的终点与x轴的夹角表示角度。
根据这个表示方法,我们可以得到三角函数在直角坐标系中的图像。
二、三角函数图像的特点1. 正弦函数(sin)的图像是一个周期为2π的波浪线。
当角度为0时,正弦函数的值为0,随着角度的增大,正弦函数的值在[-1, 1]之间变化。
2. 余弦函数(cos)的图像也是一个周期为2π的波浪线。
当角度为0时,余弦函数的值为1,随着角度的增大,余弦函数的值在[-1, 1]之间变化。
3. 正切函数(tan)的图像在某些点上会出现无穷大的值,比如在角度为90°和270°时,正切函数的值为正无穷和负无穷。
此外,正切函数的图像也具有周期性。
三、极坐标系中的三角函数表示除了直角坐标系,三角函数也可以在极坐标系中表示。
在极坐标系中,一个点的位置由极径(r)和极角(θ)决定。
1. 在极坐标系中,正弦函数(sin)的值可以表示为单位圆上对应角度的纵坐标。
2. 余弦函数(cos)的值可以表示为单位圆上对应角度的横坐标。
平面直角坐标系

描述物体的运动轨 迹:通过坐标表示 物体的运动轨迹, 通过坐标的变化表 示物体的运动状态。
描述物体的运动速度: 通过坐标表示物体的 运动速度,通过坐标 的变化表示物体的运 动加速度。
平面直角坐标系在解析几何中的应用
确定点的位置:通过坐标值可以确定点的位置 描述图形:通过坐标值可以描述直线、圆、椭圆等图形 计算距离和角度:通过坐标值可以计算两点之间的距离和角度 解决几何问题:通过坐标值可以解决几何问题,如求线段长度、角度等
平面直角坐标系的轴
横轴:x轴,表示水平方向 纵轴:y轴,表示垂直方向 原点:坐标原点,位于x轴和y轴的交点 单位长度:x轴和y轴的单位长度相同,通常为1单位长度
平面直角坐标系的应用
平面直角坐标系在几何学中的应用
确定点的位置:通过坐标可以确定点的 位置
描述图形:通过坐标可以描述图形的形 状和大小
x轴和y轴的正方向分别用箭头表示,通常x轴的正方向向右,y轴的 正方向向上。 平面直角坐标系中的点可以用一对有序实数(x,y)表示,其中x表 示该点在x轴上的坐标,y表示该点在y轴上的坐标。
平面直角坐标系的坐标原点
坐标原点的坐标为(0,0)
坐标原点是确定其他点坐标 的参考点
坐标原点是平面直角坐标系 的中心点
添加标题
添加标题
添加标题
添加标题
单位长度的作用:单位长度是平 面直角坐标系中的基本度量单位, 用于表示点的位置和线段的长度。
单位长度的性质:单位长度是平 面直角坐标系中的基本度量单位, 具有不变性和唯一性。
平面直角坐标系的象限
第一象限:x>0, y>0 第二象限:x<0, y>0 第三象限:x<0, y<0 第四象限:x>0, y<0
在直角坐标系中表示角
(1)角与角的终边重合: (2)角与角的终边关于x轴对称: (3)角与角的终边关于y轴对称: (4)角与角的终边关于原点对称:
归纳总结:
结论:两个角、,四种关系:
一个重合、三个对称(以下k Z)
终边 重 合 2k 2k 终边关于 x 轴对称 2k 2k 终边关于 y 轴对称 2k 2k 终边关于原点对称 2k 2k
1、终边在x轴上的角的集合为____ k , k Z
2、终边在y轴上的角的集合为____
y
2k
k
2
,k
Z
(2k 1)
O
x
2k
二、表示轴线角之二:“多条终边”的角
例三:写出终边落在坐标轴上的角的集合
第1题图:y
2
2
1
2
x
x
k
2
,
k
Z
O
3 3
22
x
0 0
2k , k Z
3、终边关于原点对称
k , k Z
小结:
本节课我们学习了哪些新知识? 运用了哪些方法?
练习三:
1、终边落在直线y 3 x上的所有角的集合
3
k
6
,k
Z
2、终边落在函数y 3 x 图像上的所有角的集合 3
k
(1)k
6
,k
Z
引申:思考题
相关角:两个角、 之间的关系
,k
Z
终边位于第一、二象限的角分线上的角:
k (1)k , k Z。
4
针对例六的归纳总结——结论?
1、终边落在30或210角位置的所有角的集合 2、终边与x轴正半轴的夹角为60的角的集合
数学平面直角坐标系的知识点

数学平面直角坐标系的知识点数学平面直角坐标系的知识点漫长的学习生涯中,是不是听到知识点,就立刻清醒了?知识点也不一定都是文字,数学的知识点除了定义,同样重要的公式也可以理解为知识点。
想要一份整理好的知识点吗?下面是店铺精心整理的数学平面直角坐标系的知识点,供大家参考借鉴,希望可以帮助到有需要的朋友。
数学平面直角坐标系的知识点11.平面直角坐标系:(1)在平面内两条有公共点并且互相垂直的数轴就构成了平面直角坐标系,通常把其中水平的一条数轴叫横轴或轴,取向右的方向为正方向;铅直的数轴叫纵轴或轴,取向上的方向为正方向;两数轴的交点叫做坐标原点。
(2)建立了直角坐标系的平面叫坐标平面.x轴和y轴把坐标平面分成四个部分,称为四个象限,按逆时针顺序依次叫第一象限、第二象限、第三象限、第四象限说明:两条坐标轴不属于任何一个象限。
2.点的坐标:对于平面直角坐标系内任意一点P,过点P分别向x轴和y轴作垂线,垂足在x轴,y轴对应的数a,b分别叫做点P的横坐标,纵坐标,有序数对(a,b)叫做P的坐标。
3.点与有序实数对的关系:坐标平面内的点可以用有序实数对来表示,反过来每一个有序实数对应着坐标平面内的一个点,即坐标平面内的点和有序实数对是一一对应的关系。
数学平面直角坐标系的知识点2一、平面解析几何的基本思想和主要问题平面解析几何是用代数的方法研究几何问题的一门数学学科,其基本思想就是用代数的方法研究几何问题。
例如,用直线的方程可以研究直线的性质,用两条直线的方程可以研究这两条直线的位置关系等。
平面解析几何研究的问题主要有两类:一是根据已知条件,求出表示平面曲线的方程;二是通过方程,研究平面曲线的性质。
二、直线坐标系和直角坐标系直线坐标系,也就是数轴,它有三个要素:原点、度量单位和方向。
如果让一个实数与数轴上坐标为的点对应,那么就可以在实数集与数轴上的点集之间建立一一对应关系。
点与实数对应,则称点的`坐标为,记作,如点坐标为,则记作;点坐标为,则记为。
直角坐标系度数
直角坐标系度数直角坐标系是平面几何中的基本概念,在直角坐标系中,每个点都可以由两个坐标值(x,y)确定其位置。
在直角坐标系中,我们通常使用度数来表示角的大小,度数是表示一个角相对于原始位置的旋转程度的单位。
在直角坐标系中,度数有着重要的几何意义。
下面我们来看看直角坐标系中度数的相关知识。
1. 度数的定义在直角坐标系中,角是由两条射线共同端点组成的形状。
度数是用来表示一个角相对于原始位置的旋转程度的单位,通常用符号°表示。
一个完整的圆360°,刚好代表由原始位置旋转一周。
2. 正角和负角在直角坐标系中,我们可以根据角的旋转方向将角分为正角和负角。
当角按逆时针方向旋转时,度数为正;当角按顺时针方向旋转时,度数为负。
3. 角度和弧度的转换在直角坐标系中,除了用度数表示角的大小外,还可以使用弧度表示。
1弧度等于角所对圆的弧长和半径相等时的圆心角。
弧度和度数之间的转换关系为:1弧度≈ 57.3°。
4. 角的类型在直角坐标系中,角可以分为锐角、直角、钝角、周角等不同类型。
锐角是指角度小于90°的角,直角是指角度等于90°的角,钝角是指角度大于90°小于180°的角,周角是指角度等于360°的角。
5. 角的运算在直角坐标系中,可以对角进行加减乘除等运算。
例如,两个角的和等于它们的度数之和,两个角的差等于它们的度数之差。
以上是关于直角坐标系中度数的相关知识,度数在几何学中有着重要的意义,帮助我们描述和计算角的大小和位置关系。
理解直角坐标系中度数的概念,对于学习几何学和解决相关问题具有重要的指导意义。
第1讲 第1节平面直角坐标系
P′(x′,y′),称φ为平面直角坐标系中的坐标伸缩变换,简 伸缩变换 . 称__________
3.三角函数的伸缩变换 由函数 y=sin x 的图象通过变换得到 y=Asin(ωx+φ)的图 象,方法一(先平移后伸缩): 向左φ>0或向右φ<0 y=sin(x+φ) y = sin x 的图象 ―――――→ ________________ 平移|φ|个单位长度 1 横坐标变为原来的 倍 ω y=sin(ωx+φ) 的图象 ―――――→ _________________ 的图象 纵坐标不变 纵坐标变为原来的A倍 ――→ y=Asin(ωx+φ)的图象. 横坐标不变
[思路点拨]
(1)建立适当坐标系;
(2)用坐标和方程表示出|PM|= 2|PN|; (3)代入坐标,求出(x,y)关系式.
• [解题过程] 如下图,以直线O1O2为x轴,线 段O1O2的垂直平分线为y轴,建立平面直角坐 标系,则两圆心的坐标分别为O1(-2,0), O2(2,0).
[变式训练]
2.在平面直角坐标系中,求下列方程所对应 后的图形,
x′=2x 的图形经过伸缩变换 y′=4y
(1)2x+4y=a; (2)x2+y2=r2(r≠0).
解析:
1 x=2x′ x ′ = 2 x (1)由伸缩变换 ,得到 y′=4y y=1y′ 4
第一 讲
坐标系
•第一节 平面直角坐标系
• 某村庄P处有一堆肥料,现要把这堆肥料沿 道路PA或PB送到成矩形的一块田地ABCD中 去,已知PA=100米,PB=150米,BC=60 米,∠APB=60°. • 能否在田中确定一条界线,使位于界线左侧 的点沿道路PA送肥料较近,而右侧的点沿PB 送肥料较近?
常见坐标系
常见坐标系
常见的坐标系有:
1. 直角坐标系:也称笛卡尔坐标系,由两个相交的数轴组成,其中一个表示横坐标,另一个表示纵坐标,常用于平面直角坐标系和空间直角坐标系。
2. 柱面坐标系:由一个平面直角坐标系和一个竖直轴构成,其中一个数轴表示距离,另一个数轴表示角度,常用于描述圆柱体中的三维坐标。
3. 极坐标系:由一个原点和一个与原点相交的径线组成,一个数轴表示径向距离,另一个数轴表示极角,常用于描述圆形或极坐标线中的二维坐标。
4. 球面坐标系:由一个球心和一组垂直于球心的经线和纬线组成,其中一个数轴表示距离,一个数轴表示极角,另一个数轴表示方位角,常用于描述球体中的三维坐标。
以上几种常见的坐标系在各自的领域中都有广泛的应用。
直角坐标系角度
直角坐标系角度在数学中,直角坐标系是描述平面空间中点位置的常用方法。
角度则是描述两条射线之间的旋转关系。
在直角坐标系中,角度是一个十分重要的概念,它帮助我们理解平面中物体的方向和位置关系。
角度的定义角度是射线之间的旋转程度。
在直角坐标系中,我们通常使用弧度来表示角度。
一弧度定义为半径长度的一段弧所对应的夹角。
角度的单位是度(°),360度等于一圈。
角度还可以用分(′)和秒(″)来表示更细小的角度单位。
角度的表示在直角坐标系中,我们通常用坐标轴上的正向来定义角度。
以原点为起点,逆时针方向旋转生成的角度是正角度,顺时针方向则是负角度。
例如,水平向右是0度,顺时针旋转90度得到的是正y轴的方向,逆时针旋转90度则得到负y轴的方向。
角度的计算在直角坐标系中,可以通过向量的运算来计算角度。
两个向量的夹角可以通过它们的点积和长度来求得。
对于向量a和向量b,它们的点积为a·b = |a| |b| cosθ,其中θ表示两个向量的夹角。
通过这个公式,我们可以求得两个向量之间的夹角,从而计算出角度。
角度的应用角度在直角坐标系中有着广泛的应用。
在几何学中,我们可以利用角度来描述两条直线或两个平面的夹角。
在物理学中,角度也是一个重要的概念,例如在力学中描述物体的运动方向和速度方向。
在工程学和建筑学中,角度也被用来设计结构和确定方向。
总的来说,直角坐标系角度是一个重要且常用的概念。
通过理解角度的定义、表示、计算和应用,我们可以更好地理解和利用直角坐标系,从而更好地解决实际问题。
40度代坐标
40度代坐标在数学中,我们经常会遇到各种各样的坐标系,如直角坐标系、极坐标系等等。
而今天我要介绍的是一种非常特殊的坐标系,它被称为“40度代坐标”。
40度代坐标是一种极坐标系的变种,它的特点是将极坐标系中的角度单位从弧度改为了40度。
在40度代坐标系中,一个完整的圆周被分为9个等分,每个等分的角度为40度。
这样一来,我们可以用40度代坐标来描述一个点在平面上的位置。
与直角坐标系相比,40度代坐标系更加简洁明了。
在直角坐标系中,我们需要用两个数值来表示一个点的位置,分别是横坐标和纵坐标。
而在40度代坐标系中,我们只需要一个数值,即距离原点的距离。
这个距离可以是正数、负数或零,分别表示点在原点的右侧、左侧或正好在原点上。
使用40度代坐标系可以带来很多的便利。
首先,它可以简化数学计算。
在直角坐标系中,计算两个点之间的距离需要用到勾股定理,而在40度代坐标系中,只需要计算两个点的距离差即可。
其次,40度代坐标系可以更好地描述一些特殊的几何形状。
例如,在直角坐标系中,一个正方形的四个顶点的坐标很难表示为整数,而在40度代坐标系中,这个问题就可以迎刃而解。
当然,40度代坐标系也有一些局限性。
首先,它只适用于平面上的二维几何问题,无法描述三维空间中的物体。
其次,由于40度代坐标系的特殊性,它在数学教学中并不常见,学生可能需要一定的时间来适应和理解。
尽管如此,40度代坐标系仍然是一种有趣且有用的数学工具。
它的引入可以帮助我们更好地理解和解决一些几何问题,同时也可以培养我们的创造力和思维能力。
在实际应用中,40度代坐标系可能并不常见,但它的思想和方法可以启发我们在其他领域的创新和突破。
总之,40度代坐标系是一种特殊的坐标系,它将极坐标系中的角度单位改为了40度。
它的引入可以简化数学计算,更好地描述一些特殊的几何形状。
虽然它在实际应用中并不常见,但它的思想和方法对我们的数学学习和思维能力的培养具有积极的意义。
让我们一起探索40度代坐标系的奥秘,开拓数学的新领域!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
终 边
B
始 边
O A x
顶 点
角的顶点在坐标原点,始边与x轴的正半轴重合。
课前小练:
1、指出下列角的弧度数:
y B
45
O
A
x
(1)
y B
30
O (2)
Ax
5 , 17
4
6
新课:
一、表示“一条终边”的角: 例题一:写出终边落在下列位置的角的集合:
2、请指出下1列、各x角轴终正边半的轴位置:
y
第(2)题:4
45
O
x
O
x
第(1)题:
6
(2k , 2k ], k Z
4
[2k , 2k ), k Z
3
4
3、已知集合A | 2k (2k 1) , k Z, B | 4 4, 则A B [__4_, ] [0, ]
A
B
A
A
2 4 O
4 2 3 x
四、表示对称角:
例六:写出终边落在下面两条射线上的角的集合
1、终边落在30或210角位置的所有角的集合
(2k [2,k2k , 2]k,k Z ], k Z
6 63 3
第2题:
y
60
O 图2
x
2k 2k
[2k
,
2k
),
k
6 Z
,
k
Z
6
三、表示区间角:
例五:在直角坐标系中,用阴影部分表示下列
区间角,并在数轴上表示出来。
2、先指出下列角的终边位置, 再写出该终边所表示的角的集合。
, , 2 , , , 5
2 3 46 6
2 y
2k 3
3
2k
0
O
x
练3习、一指、出分下别列写出角终的边弧落度在数下:列位置的角的集合
1、 y
B
45
O
y
B
A
30
x
O
(1)
(2)
A
x
2k2k5435,4, ,2k2k1761765
,(k Z) ,(k Z)
4
6
练习一: 用弧度制表示下列各角的集合:
2、如图,角的集合为______
y
A O 45 x
B
2k
15
4
,k
Z
第2题 变式一:
将的集合表示成 2k ,0 2 , k Z的形式为:
2、终边在y轴上的角的集合为____
y
2k
k
2
,
k
Z
(2k 1)
O
x
2k
二、表示轴线角之二:“多条终边”的角
例三:写出终边落在坐标轴上的角的集合
第1题图:y
2
2
1
2
x
x
k
2
,k
Z
O
3 3
x
k
4
,
k
Z
三、表示区间角:
例四:请写出终边落在阴影部分的角的集合
y
30
第1题:
2k
3
,k
Z
30
O 图1
x
2k
6
,
k
Z
ห้องสมุดไป่ตู้
2k
62k
62k32,kkZ3,
k
Z
2k
7
4
,
k
Z
y O 45 x
第2题 变式二:
将的集合表示成 2k (k Z, ) 的形式为:
2k
4
,
k
Z
二、表示轴线角之一:“两条终边”的角
例二:请用集合表示下列轴线角:(用弧度制)
1、终边在x轴上的角的集合为____ k , k Z
y
, 4 ,2 , 0, 2 , 4 , 6 ,
2k , k Z
O
x
例题一:写出终边落在下列位置的角的集合:
2、先指出下列角的终边位置, 再写出该终边所表示的角的集合。
, , 2 , , , 5
2 3 46 6
2 y
3
3
0
O
x
例题一:写出终边落在下列位置的角的集合:
第三课时 桃浦中学 付敏忠
三角知识回顾:
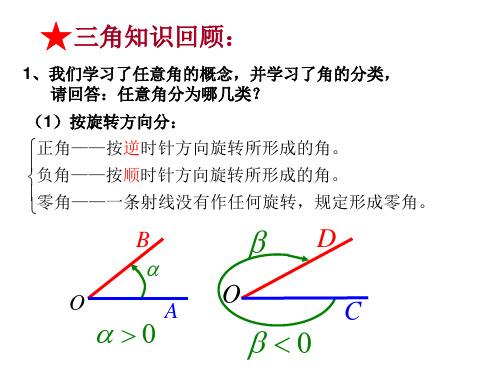
1、我们学习了任意角的概念,并学习了角的分类, 请回答:任意角分为哪几类?
(1)按旋转方向分:
正角——按逆时针方向旋转所形成的角。 负角——按顺时针方向旋转所形成的角。 零角——一条射线没有作任何旋转,规定形成零角。
B
O
A
0
D
O
C
0
1、(2k , 2k ], k Z
4
2
2、[k , k ), k Z
4
练习二:
1、请用区间表示下列各角: (1)第三象限角的集合为_____
(2)终边落在x轴上方的角的集合为___
2、请用区间表示下图中的角:
y
y
第(2)题:4
45
O
x
O
x
第(1)题:
6
(2)在直角坐标系中,按照终边的位置分:
象限角——终边位于象限内部的角。 非象限角(轴线角)——终边落在坐标轴上的角。
y
第二象 限角
O
轴线角
第一 象限
x角
2、在直角坐标系中研究角,为了引入象限角的 概念,进而定义任意角的三角比,在没有特别说 明的情况下,角的顶点、始边的位置通常在哪里?
22
x
0 0
x
x
k
2
4
,
k
Z
2
终边落在四个象限的角分线上的角的集合?
2、写出终边落在坐标轴以及 四个象限的角分线上的角的集合
x轴正半轴:x x 2k , k Z
y
x轴:x x k ,k Z
O
x
坐标轴:x
x
k
2
,k
Z
答案:x
练习二:
1、请用区间表示下列各角:
(1)第三象限角的集合为_(_2_k__
,
2k
3
),
k
Z
(2)终边落在x轴上方的角的集合为___
2
y
y
Ox
O
x
图2
图1
(2k , 2k ), k Z
(2k , 2k ), k Z
2
2、请用区间表示下图中的角:
y
【解法一】:在直角坐标系中取交集。
4 y
4 或 0
A
O
x
B
4
3、已知集合A | 2k (2k 1) , k Z, B | 4 4, 则A B [__4_, ] [0, ]
【解法二】:在数轴上取交集。