圆柱圆球坐标系
球形和圆柱形坐标系介绍

常用坐标系
1.球坐标系
定义:假设P 点在三维空间的位置的三个坐标是。
那么,0 ≤r是从原点到P 点的距离,0 ≤θ≤π是从原点到P 点的连线与正z-轴的夹角,0 ≤φ< 2π是从原点到P 点的连线在xy-平面的投影线,与正x-轴的夹角。
解释
假设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数(r,θ,φ)来确定,
其中:r为原点O与点P间的距离;
θ为有向线段OP与z轴正向的夹角,通常把它称之为仰角;
φ,为从正z轴来看,自x轴按逆时针方向转到OM所转过的角,这里M 为点P在xOy面上的投影,通常把它称之为方位角;
这样的三个数r,θ,φ叫做点P的球面坐标,显然,这里r,θ,φ的变化范围为r∈[0,+∞),φ∈[0, 2π],θ∈[0, π] ,
与直角坐标系间的转换
1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系:
X=rsinθcosφ
y=rsinθsinφ
z=rcosθ
2).反之,直角坐标系(x,y,z)与球坐标系(r,θ,φ)的转换关系为:
r=sqrt(x*2 + y*2 + z*2);
θ= arccos(z/r);
φ=arctan(y/x);
.圆柱坐标系
如图右,P 点的圆柱坐标是(ρ,φ,z)。
ρ是 P 点与 z-轴的垂直距离(相当于二维极坐标中的半径r),φ是线 OP 在xy-面的投影线与正 x-轴之间的夹角(相当于二维极坐标中的θ),z与直角坐标的z等值,即P点距x-y平面的距离。
与直角坐标系间的转换
x=ρcosφ
y=ρsinφ
z=z。
圆柱坐标系和球坐标系

圆柱坐标系和球坐标系1. 圆柱坐标系圆柱坐标系是一种常用的三维坐标系,由一个水平的圆柱面和一个垂直的直线轴线组成。
在圆柱坐标系中,一个点的位置由径向距离、角度和高度三个参数来确定。
下面分别介绍这三个参数的定义和使用。
1.1 径向距离径向距离是指从原点(轴线的起点)到点的距离,通常用r表示。
在平面直角坐标系中,点(x,y)到坐标原点的距离可以用勾股定理来计算:$r = \\sqrt{x^2 +y^2}$。
在圆柱坐标系中,点$(r, \\theta, z)$到坐标原点的距离就是径向距离r。
1.2 角度角度参数$\\theta$表示从正向x轴逆时针转到点所在的平面的角度,通常用弧度表示。
在平面直角坐标系中,点(x,y)的角度可以用反正切函数来计算:$\\theta = \\arctan(\\frac{y}{x})$。
在圆柱坐标系中,点$(r, \\theta, z)$的角度就是参数$\\theta$。
1.3 高度高度参数z表示点在垂直轴线上的位置。
高度可以为正、负或零。
在圆柱坐标系中,一个点的位置可以用三个参数$(r, \\theta, z)$来表示。
2. 球坐标系球坐标系是另一种常用的三维坐标系,由一个球面和一个垂直的直线轴线组成。
在球坐标系中,一个点的位置由极径、极角和方位角三个参数来确定。
下面分别介绍这三个参数的定义和使用。
2.1 极径极径是指从原点到点的距离,通常用r表示。
在平面直角坐标系中,点(x,y)到坐标原点的距离可以用勾股定理来计算:$r = \\sqrt{x^2 + y^2}$。
在球坐标系中,点$(r, \\theta, \\phi)$到坐标原点的距离就是极径r。
2.2 极角极角参数$\\theta$表示从正向x轴逆时针转到点所在的平面的角度,通常用弧度表示。
在平面直角坐标系中,点(x,y)的角度可以用反正切函数来计算:$\\theta = \\arctan(\\frac{y}{x})$。
数学课件:1.5 柱坐标系和球坐标系

������ = ������.
题型一 题型二 题型三 题型四 题型五
正解∵r= ������2 + ������2 + ������2 = 12 + 12 + ( 2)2 = 2,
z=rcos φ= 2, ∴ cos ������ = 22.
(2)(π,π,π).
解:设点的直角坐标为(x,y,z).
(1)∵(ρ,θ,z)=(2,0,-2), ������ = 2cos0 = 2,
12
2.球坐标系 (1)定义:设空间中一点 M 的直角坐标为(x,y,z),点 M 在 xOy 坐标
面上的投影点为 M0,连接 OM 和 OM0.如图所示,设 z 轴的正向与向量
������������的夹角为������, ������轴的正向与������������0的夹角为������, ������点到原点������的距离 为������, 则由三个数������, ������, ������构成的有序数组 ������, ������, ������ 称为空间中点������的球
A.
2
2,
π 6
,
3π 4
C.
2
2,
π 3
,
π 4
B.
2
2,
π 6
,
π 4
D.
2
2,
π 3
,
3π 4
解析:设 M 的球坐标为(r,θ,φ),
3 = ������sin������cos������, 则 1 = ������sin������sin������,
柱坐标和球坐标

柱坐标和球坐标柱坐标和球坐标是数学中常用的两种坐标系,它们在描述空间中点的位置时有各自的特点和应用。
本文将介绍柱坐标和球坐标的定义、表示方法以及它们之间的转换关系。
柱坐标柱坐标是三维空间中表示点位置的坐标系之一。
柱坐标通常使用径向距离r、极角 $\\theta$ 和高度z来描述一个点的位置。
在柱坐标系中,点 $(r, \\theta,z)$ 表示距离原点的长度为r,与x轴正向的夹角为 $\\theta$,高度为z的点。
柱坐标系下,点 $(r, \\theta, z)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= r \\cdot \\cos(\\theta) \\\\ y &= r \\cdot\\sin(\\theta) \\\\ z &= z \\end{aligned} $$球坐标球坐标是另一种用于表示三维空间中点位置的坐标系。
球坐标通常使用球径ρ、极角 $\\phi$ 和方位角 $\\theta$ 来描述点的位置。
在球坐标系中,点$(ρ, \\phi,\\theta)$ 表示距离原点的长度为ρ,与z轴正向的夹角为 $\\phi$,与x轴正向的夹角为 $\\theta$ 的点。
球坐标系下,点$(ρ, \\phi, \\theta)$ 与直角坐标系下的点(x,y,z)之间的关系可以用以下公式表示:$$ \\begin{aligned} x &= ρ \\cdot \\sin(\\phi) \\cdot \\cos(\\theta) \\\\ y &= ρ \\cdot \\sin(\\phi) \\cdot \\sin(\\theta) \\\\ z &= ρ \\cdot \\cos(\\phi)\\end{aligned} $$柱坐标和球坐标之间的转换要将柱坐标转换为球坐标,可以使用以下公式:$$ \\begin{aligned} ρ &= \\sqrt{r^2 + z^2} \\\\ \\phi &=\\arctan\\left(\\frac{r}{z}\\right) \\\\ \\theta &= \\theta \\end{aligned} $$ 类似地,要将球坐标转换为柱坐标,可以使用以下公式:$$ \\begin{ali gned} r &= ρ \\cdot \\sin(\\phi) \\\\ z &= ρ \\cdot \\cos(\\phi) \\\\ \\theta &= \\theta \\end{aligned} $$应用和总结柱坐标和球坐标在不同的场景中有着广泛的应用,例如在物理学、工程学和计算机图形学领域。
圆柱坐标和球坐标

圆柱坐标和球坐标
在数学和物理学中,圆柱坐标和球坐标是描述空间中点的两种常见坐标系。
它
们为描述不同形状和结构的对象提供了有效的工具,促进了对于三维空间中各种问题的研究与理解。
圆柱坐标
圆柱坐标是通过一个点到某个固定平面的垂直距离(高度)、一个从平面的固
定轴线到点的投影距离和从固定轴线到点的方向角三个参数来描述空间中的点。
通常用(ρ, φ, z)表示一个点的坐标,其中ρ代表点在固定平面上到原点的距离,φ
表示点到固定轴线的方向角,z表示点在垂直于平面的高度。
在圆柱坐标系中,点的坐标可以通过以下公式转换为直角坐标系:
x = ρ * cos(φ)
y = ρ * sin(φ)
z = z
圆柱坐标系常被应用于描述圆柱体或者沿着某个轴无限延伸的体。
球坐标
球坐标是通过一个点到原点的距离(半径)、与固定轴线的夹角(极角)、和
与某个平面的夹角(方位角)这三个参数来描述三维空间中的点。
一般用(r, θ, φ)来表示一个点的球坐标,其中r是点到原点的距离,θ是点到正轴的极角,φ是点
到参考平面的方位角。
球坐标系与直角坐标系之间的转换公式如下:
x = r * sin(θ) * cos(φ)
y = r * sin(θ) * sin(φ)
z = r * cos(θ)
球坐标系适合描述以原点为中心,半径不同的球体或者球面等几何体。
总结来看,圆柱坐标系主要适用于圆柱体或沿着某轴无限延伸的物体的描述,
而球坐标系更适用于球体或球面等对称几何体的描述。
通过这两种坐标系,我们可以更清晰地描述和理解三维空间中各种复杂的几何结构和物理现象。
柱坐标和球坐标简介

空间点的直角坐标化为球坐标
已知长方体 ABCD - A1B1C1D1 中,底面正方形 ABCD 的边长为 1,棱 AA1 的长为 2,如图 1-4-3 所示, 建立空间直角坐标系 Axyz,Ax 为极轴,求点 C1 的直角坐标 和球坐标.
图 1-4-3
【思路探究】 先确定 C1 的直角坐标,再根据空间直角 坐标系与球坐标系的联系,计算球坐标. 【自主解答】 点 C1 的直角坐标为(1,1, 2).
(2) 已知柱坐标系中的柱坐标化为直角坐标,利用公式 x=ρcos θ, y=ρsin θ, 求出 x,y,z 即可. z=z, 【自主解答】 (1)设 M 的柱坐标为(ρ,θ,z),
1=ρcos θ, 则由1=ρsin θ, z=1,
π 解之得,ρ= 2,θ=4.
π 因此,点 M 的柱坐标为( 2,4,1).
3.空间直角坐标与柱坐标的转化 空间点 P(x,y,z)与柱坐标(ρ,θ,z)之间的变换公式为 x=ρcos θ, y=ρsin θ, z=z . 4.空间直角坐标与球坐标的关系 空间点 P(x,y,z)与球坐标(r,φ,θ)之间的变换公式为
x=rsin φcos θ, y=rsin φ sin θ, z=rcos φ
(2)由 r= x2+y2+z2= 12+12+0= 2. z ∴cos φ= =0, r π ∴φ= . 2 π π 故点 C 的球坐标为( 2, , ). 2 4
柱坐标系、球坐标系的应用
π π 已知点 P1 的球坐标是 P1(2 3, , ),P2 的柱 3 4 π 坐标是 P2( 6, ,1),求|P1P2 |. 6
1.柱坐标系
图 1-4-1 如图 1-4-1 所示, 建立空间直角坐标系 Oxyz. 设 P 是空 间 任 意 一 点 . 它 在 Oxy 平 面 上 的 射 影 为 Q , 用 (ρ , θ)(ρ≥0,0≤θ<2π)表示点 Q 在平面 Oxy 上的极坐标, 这时点 P 的位置可用有序数组(ρ,θ,z)(z∈R)表示.
课件1:四 柱坐标系与球坐标系简介

题型三 空间点的坐标
1. 空间直角坐标系中点的坐标是由横坐标、纵坐标和竖坐标 三度来确定的,即(x,y,z).
变换关系为
xy==rr··ssiinn
φ·cos φ·sin
θ, θ,
—z—=—rco—s —φ.—————
题型一 柱坐标系
柱坐标系又称半极坐标系,它是由平面极坐标系及空间直 角坐标系中的一部分建立起来的. 空间任一点P的位置可以用有序数组(ρ,θ,z)表示,(ρ,θ) 是点P在Oxy平面上的射影Q的极坐标,z是P在空间直角坐 标系中的竖坐标.
2,π4,0,
3,arctan
2,π4,
2,π4,π2, 26,arctan
22,π4,
它们的柱坐标分别为(0,0,1),(1,0,1),
2,π4,1,1,π2,1,
22,π4,1.中层的原子所在的平面平行于
xOy
平面,与
z
轴交
点的竖坐标为12,所以,这四个钠原子所在位置的球坐标分别为
22,π4,0,
(2)空间点 M 的直角坐标(x,y,z)与柱坐标(ρ,θ,z)之间的
变换公式为
xy==ρρscions
θ, θ,
z=z.
————————
2.球坐标系 (1)定义:设 M(x,y,z)为空间一点,点 M 可用这样三个有次序的数 r,φ,θ 来确定,其中 r 为原点 O 到点 M 间的距离,φ 为有向线段O→M与 z 轴正方向所夹的
例2 经过若干个固定和流动的地面遥感观测站监测,并 通过数据汇总,计算出一个航天器在某一时刻离地面2384 千米的位置,地球半径为6371千米,此时经度为800,纬度为 750.试建立适当的坐标系,确定出此时航天器点P的坐标.
圆柱坐标系和球坐标系是一样的吗为什么
圆柱坐标系和球坐标系是一样的吗?为什么?1. 引言在三维空间中,常用的坐标系统包括直角坐标系、极坐标系、圆柱坐标系和球坐标系等。
其中,圆柱坐标系和球坐标系在描述点的位置和方向时非常常见。
然而,它们之间存在着一定的区别。
本文将通过对圆柱坐标系和球坐标系的定义、转换关系和应用等方面的探讨,来回答“圆柱坐标系和球坐标系是一样的吗?为什么?”这个问题。
2. 圆柱坐标系的定义和特点圆柱坐标系是一种以点到直角坐标系x、y轴的投影距离以及点到z轴的距离来描述点的位置的坐标系统。
在圆柱坐标系中,点的坐标由三个分量表示:$P(r,\\theta, z)$。
其中,r代表点到z轴的投影长度,$\\theta$代表点在x、y平面上的极角,z代表点距离x、y平面的高度。
圆柱坐标系的特点是可以简洁地描述环形结构,如圆柱体或圆柱面等。
它本质上是三维空间的二维定义(平面坐标系)加上一个垂直方向的高度。
3. 球坐标系的定义和特点球坐标系是一种以点到原点的距离、点到原点连线与正半轴的夹角和点到该连线在投影平面上的投影距离来描述点的位置的坐标系统。
在球坐标系中,点的坐标同样由三个分量表示:$P(\\rho, \\phi, \\theta)$。
其中,$\\rho$代表点到原点的距离,$\\phi$代表点到原点连线与正半轴的夹角,$\\theta$代表点在投影平面上的投影位置的极角。
球坐标系的特点是可以用来描述以一个固定点为中心的球状结构。
它是一个以距离、纬度和经度来描述点的位置的坐标系。
4. 圆柱坐标系和球坐标系的关系圆柱坐标系和球坐标系并不相同,它们之间存在一定的差异。
首先,在数学上,两个坐标系使用的坐标分量不同。
圆柱坐标系使用的是笛卡尔坐标系中的$(r, \\theta, z)$,而球坐标系使用的是$(\\rho, \\phi, \\theta)$。
其次,两个坐标系描述的空间结构也不同。
圆柱坐标系主要用于描述圆柱体或圆柱面等具有轴对称性的结构,而球坐标系则主要用于描述球状结构。
圆柱坐标系和球坐标系

如果矢量场对于任何闭合曲线的环流不为零,称该矢量场为有旋矢量场,能够 激发有旋矢量场的源称为旋涡源。电流是磁场的旋涡源。
28
2. 矢量场的旋度(
r ) F
为给出空间任意点矢量场与旋涡源的关系,引入矢量场的旋度。
(1)环流面密度 当S0 时,极限
rot
n
F
lim
S 0
1 S
F dl
C
称为矢量场在点M 处沿方向的环流面
25
1.5 矢量场的环流与旋度
1. 矢量场的环流与旋涡源 矢量源所激发的矢量场的力线是闭合的,它对于任何闭合曲面的通量为零。但在场 所定义的空间中闭合路径的积分不为零。
例如:流速场。
26
如磁场沿任意闭合曲线的积分与通过闭合曲线所围曲面的电流成正比,即
B(x, y, z) dl C
0I 0
erˆydxdz
erˆzdxdy
体积元
dV dxdydz
9
z
z z0 (erˆz平面)
P
erˆx
o
erˆy
点P(x0,y0,z0)
y
y y0(平面)
x x x0 (平面)
直角坐标系
z
r dSz
erˆzdxdy
dz
r dSy
erˆydxdz
dx
o
dy
r dSx
erˆxdydz
y
x
直角坐标系的长度元、面积元、体积元
•2. 圆柱坐标系
10
z z0(平面)
坐标变量 坐标单位矢量 位置矢量 线元矢量 面元矢量
体积元
,, z
erˆ , erˆ , erˆz
rr erˆ erˆz z
圆柱坐标系与球坐标系区别
圆柱坐标系与球坐标系区别圆柱坐标系和球坐标系是数学中常用的两种坐标系统,它们在描述三维空间中点的位置和表示物体的形状方面起着重要作用。
虽然它们都是由三个坐标轴组成的,但圆柱坐标系和球坐标系之间有着一些明显的区别。
本文将介绍这两种坐标系的基本概念、坐标表示以及它们的区别。
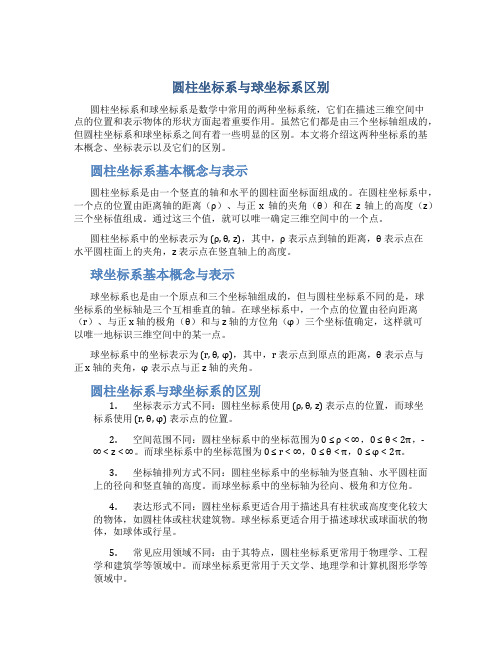
圆柱坐标系基本概念与表示圆柱坐标系是由一个竖直的轴和水平的圆柱面坐标面组成的。
在圆柱坐标系中,一个点的位置由距离轴的距离(ρ)、与正x 轴的夹角(θ)和在z 轴上的高度(z)三个坐标值组成。
通过这三个值,就可以唯一确定三维空间中的一个点。
圆柱坐标系中的坐标表示为(ρ, θ, z),其中,ρ 表示点到轴的距离,θ 表示点在水平圆柱面上的夹角,z 表示点在竖直轴上的高度。
球坐标系基本概念与表示球坐标系也是由一个原点和三个坐标轴组成的,但与圆柱坐标系不同的是,球坐标系的坐标轴是三个互相垂直的轴。
在球坐标系中,一个点的位置由径向距离(r)、与正 x 轴的极角(θ)和与 z 轴的方位角(φ)三个坐标值确定,这样就可以唯一地标识三维空间中的某一点。
球坐标系中的坐标表示为(r, θ, φ),其中,r 表示点到原点的距离,θ 表示点与正 x 轴的夹角,φ 表示点与正 z 轴的夹角。
圆柱坐标系与球坐标系的区别1.坐标表示方式不同:圆柱坐标系使用(ρ, θ, z) 表示点的位置,而球坐标系使用(r, θ, φ) 表示点的位置。
2.空间范围不同:圆柱坐标系中的坐标范围为0 ≤ ρ < ∞,0 ≤ θ < 2π,-∞ < z < ∞。
而球坐标系中的坐标范围为0 ≤ r < ∞,0 ≤ θ < π,0 ≤ φ < 2π。
3.坐标轴排列方式不同:圆柱坐标系中的坐标轴为竖直轴、水平圆柱面上的径向和竖直轴的高度。
而球坐标系中的坐标轴为径向、极角和方位角。
4.表达形式不同:圆柱坐标系更适合用于描述具有柱状或高度变化较大的物体,如圆柱体或柱状建筑物。
柱坐标系与球坐标系简介课件

z1=6×cosπ3=3. ∴点 M 的直角坐标为323,92,3, 设点 N 的直角坐标为(x2,y2,z2), 则 x2=6×sin23π×cosπ3=323, y2=6sin23π×sinπ3=92, z2=6cos23π=-3. ∴点 N 的直角坐标为323,92,-3, ∴|MN|= x1-x22+y1-y22+z1-z22=6.
2.点的空间坐标的互相转化公式 设空间一点 P 的直角坐标为(x,y,z),柱坐标为(ρ,θ,z),球坐标为(r,φ,θ),则
空间直角坐标(x,y,z)
转换公式
柱坐标 (ρ,θ,z)
x=_ρ_c_o_s_θ__, y=_ρ_s_in__θ__, z=z
球坐标 (r,φ,θ)
x=_r_s_i_n_φ_c_o_s__θ__ y=_r_s_in__φ_s_i_n_θ__ z= rcos φ
∴(- 3,1,3)为所求点的直角坐标.
(2)∵(ρ,θ,z)=
2,π4,5,
x=ρcos θ=
2cosπ4=1,
∴y=ρsin θ= 2sinπ4=1,
z=5,
∴(1,1,5)为所求点的直角坐标.
直角坐标与柱坐标的互化
点(ρ,θ,z)是三维空间坐标中的点的柱坐标,在平面 xOy 中实际为极坐标, 且 ρ≥0,0≤θ<2π,在竖直方向上 z 为任意实数.化点的柱坐标(ρ,θ,z)为直
柱坐标系与球坐标系简介
1.空间直角坐标系、柱坐标系与球坐标系 (1)空间直角坐标系:在空间选定一点 O,作两两垂直的三条数轴 Ox, Oy,Oz,使∠xOy=135°,∠yOz=90°,这就是空间直角坐标系.有 序实数组 (x,y,z) 叫点 P 的直角坐标.
(2)柱坐标系:空间直角坐标系 Oxyz 中,设 P 是空间任意一点,它在 Oxy 平面的射影为 Q,用 (ρ,θ) 表示点 Q 在平面 Oxy 上的极坐标,点 P 的位置可用有序数组 (ρ,θ,z) 表示.这就是柱坐标系.有序数组 _(_ρ_,__θ_,__z_) _叫点 P 的柱坐标.其中 ρ≥0,0≤θ<2π,-∞<z<+∞. (3)球坐标系:空间直角坐标系 Oxyz 中,设 P 是空间任意一点,连接 OP,记|OP|=r,OP 与 Oz 轴正向所夹的角为 φ.P 在 Oxy 平面的射影 为 Q,Ox 轴按逆时针方向旋转到 OQ 时所转过的最小正角为 θ.这样 点 P 的位置就可以用有序数组(r,φ,θ)表示.这就是球坐标系.有序数组(r,φ,θ) 叫作点 P 的球坐标.其中 r≥0,0≤φ≤π,0≤θ<2π.
圆柱坐标系和球坐标系一样吗

圆柱坐标系和球坐标系的异同在数学和物理学中,圆柱坐标系和球坐标系是两种常用的坐标系。
虽然它们都是用来描述物体在空间中的位置和方向的工具,但圆柱坐标系和球坐标系在表示方式和使用方法上有着一些显著的不同。
本文将从数学定义、坐标表示、转换公式和物理应用四个方面对圆柱坐标系和球坐标系进行比较。
1. 数学定义圆柱坐标系是由一个固定的直角坐标系(又称笛卡尔坐标系)和一个极坐标系共同确定的。
其中,直角坐标系的x轴与极坐标系的极轴方向相同,y轴与极轴形成钝角(小于90°),z轴与极轴垂直。
球坐标系是由一个固定的直角坐标系和一个球面极坐标系共同确定的。
其中,球面极坐标系的原点位于直角坐标系的原点,与直角坐标系的z轴重合,球面极坐标系的极轴方向与直角坐标系的z轴重合。
2. 坐标表示在圆柱坐标系中,一个点的位置由三个坐标表示:r、$\\theta$和z,分别表示点到z轴的距离、该点的极角和该点在z轴上的高度。
在球坐标系中,一个点的位置也由三个坐标表示:r、$\\theta$和$\\phi$,分别表示该点到坐标系原点的距离、该点的极角和该点与正z轴之间的夹角。
3. 坐标转换圆柱坐标系和球坐标系之间存在一定的关系,可以通过坐标转换公式相互转换。
从圆柱坐标系到球坐标系的转换公式为:$$ r = \\sqrt{r^2 + z^2} \\\\ \\theta = \\arctan \\left(\\frac{r}{z}\\right) \\\\ \\phi = \\arcsin \\left(\\frac{z}{\\sqrt{r^2 + z^2}}\\right) $$从球坐标系到圆柱坐标系的转换公式为:$$ r = r \\sin \\phi \\\\ \\theta = \\theta \\\\ z = r \\cos \\phi $$4. 物理应用圆柱坐标系和球坐标系在物理学中有着广泛的应用。
圆柱坐标系常用于描述具有旋转对称性的问题,如旋转体的模型、流体动力学等。
球坐标系与柱坐标

二.空间直角坐标与球坐标的转化 空间直角坐标与球坐标的转化
若空间直角坐标系的原点、 轴及 轴及OZ轴 分别与 若空间直角坐标系的原点、OX轴及 轴,分别与 球坐标系的极点、 轴及 轴重合,就可以得到空 轴及OZ轴重合 球坐标系的极点、OX轴及 轴重合 就可以得到空 间同一点的直角坐标与球坐标之间的关系: 间同一点的直角坐标与球坐标之间的关系:
x +y +z =r ,
2 2 2 2
z
x = r sin θ cos ϕ , y = r sin θ sin ϕ , z = r cos ϕ .
x O
P(r ,θ , ϕ )
r z y x y
θ
ϕ
π 5π 将点M的球坐标 例2 将点 的球坐标 8, , 3 6
化为直角坐标. 化为直角坐标.
球坐标系与柱坐标系
高二备课组
在平面内,为了适应对点的位置的不 在平面内 为了适应对点的位置的不 同需求,我们创设了直角坐标系、 我们创设了直角坐标系 同需求 我们创设了直角坐标系、极坐 标系等不同的坐标系 等不同的坐标系. 标系等不同的坐标系 类似的,在空间 我们也可以创设新的 类似的 在空间,我们也可以创设新的 在空间 坐标系来满足空间对点的位置的不同 需求. 需求 空间直角坐标系,还能创设怎样的 除空间直角坐标系 还能创设怎样的 新坐标系呢 新坐标系呢?
柱坐标满足方程ρ 的点所构成的图形是什么? 例4 柱坐标满足方程ρ=2的点所构成的图形是什么 的点所构成的图形是什么 在平面极坐标系中,ρ= 表示以极点为圆心 表示以极点为圆心, 解 在平面极坐标系中 =2表示以极点为圆心 2为半径的圆 为半径的圆. 为半径的圆 因此,在柱坐标中,设OZ轴所在的直线为 因此,在柱坐标中 设 轴所在的直线为l, 轴所在的直线为 表示以l为轴 则方程 ρ=2表示以 为轴 且垂直于轴的截面 = 表示以 为轴,且垂直于轴的截面 是半径为2的圆的柱面. 的圆的柱面 是半径为 的圆的柱面
四柱坐标系与球坐标系简介

.
HONGDIAN NANDIAN
S 随堂练习
UITANG LIANXI
首 页
J 基础知识 Z 重点难点
ICHU ZHISHI
HONGDIAN NANDIAN
1
1.若点 M 的直角坐标为(-1,- 3,3),则它的柱坐标是(
3
B. 2,
2
,3
3
4
,3
3
D. 2,
5
,3
3
A. 2, ,3
C. 2,
4 4
5
2, ,
4 4
5
4 4
3
2, ,
4 4
A. 2, ,
B. 2, ,
C.
D.
解析:由坐标变换公式,
得 r= x 2 + y 2 + z 2 =2,
z
r
2
,∴φ= .
2
4
y
-1
∵tan θ= = =1,
x
-1
5
∴θ= .
4
cos φ= =
5
4 4
∴点 M 的球坐标为 2, ,
首 页
J 基础知识 Z 重点难点
ICHU ZHISHI
课程目标
1.借助具体实例了解柱坐标系、球坐标系中刻画空间中点
的位置的方法.
2.与空间直角坐标系中刻画点的位置方法相比较,体会它
们的区别与联系.
HONGDIAN NANDIAN
学习脉络
S 随堂练习
UITANG LIANXI
首 页
1
J 基础知识 Z 重点难点
则
2 =
2 = 1,
所以点 P2 的直角坐标为
圆柱坐标和球坐标转化方法
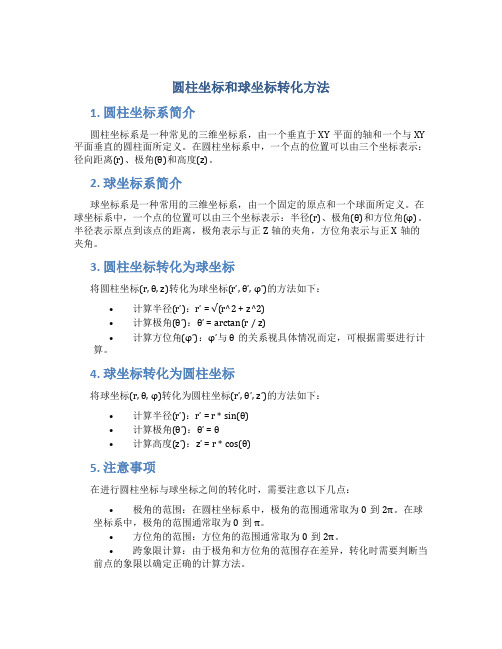
圆柱坐标和球坐标转化方法1. 圆柱坐标系简介圆柱坐标系是一种常见的三维坐标系,由一个垂直于XY平面的轴和一个与XY 平面垂直的圆柱面所定义。
在圆柱坐标系中,一个点的位置可以由三个坐标表示:径向距离(r)、极角(θ)和高度(z)。
2. 球坐标系简介球坐标系是一种常用的三维坐标系,由一个固定的原点和一个球面所定义。
在球坐标系中,一个点的位置可以由三个坐标表示:半径(r)、极角(θ)和方位角(φ)。
半径表示原点到该点的距离,极角表示与正Z轴的夹角,方位角表示与正X轴的夹角。
3. 圆柱坐标转化为球坐标将圆柱坐标(r, θ, z)转化为球坐标(r’, θ’, φ’)的方法如下:•计算半径(r’):r’ = √(r^2 + z^2)•计算极角(θ’):θ’ = arctan(r / z)•计算方位角(φ’):φ’与θ的关系视具体情况而定,可根据需要进行计算。
4. 球坐标转化为圆柱坐标将球坐标(r, θ, φ)转化为圆柱坐标(r’, θ’, z’)的方法如下:•计算半径(r’):r’ = r * sin(θ)•计算极角(θ’):θ’ = θ•计算高度(z’):z’ = r * cos(θ)5. 注意事项在进行圆柱坐标与球坐标之间的转化时,需要注意以下几点:•极角的范围:在圆柱坐标系中,极角的范围通常取为0到2π。
在球坐标系中,极角的范围通常取为0到π。
•方位角的范围:方位角的范围通常取为0到2π。
•跨象限计算:由于极角和方位角的范围存在差异,转化时需要判断当前点的象限以确定正确的计算方法。
6. 示例下面给出一个示例,将圆柱坐标(3, 45, 2)转化为球坐标:•计算半径(r’): r’ = √(3^2 + 2^2) = √13•计算极角(θ’): θ’ = arctan(3 / 2) ≈ 56.31°•计算方位角(φ’): 视具体情况而定根据计算结果,圆柱坐标(3, 45, 2)可以转化为球坐标(√13, 56.31°, φ’)。
圆柱,圆球坐标系
1.8 圆柱坐标系与球坐标系
CQU
三单位矢量e 有以下特点: 三单位矢量 ρ、eφ和ez有以下特点
三个单位矢量相互正交,且满足右手关系, 三个单位矢量相互正交,且满足右手关系,即 er× eθ= eφ; eθ× eφ = er ; eφ × er = eθ
球坐标系中的三度表达式
∇ = er ∂ 1 ∂ 1 ∂ + eθ + eφ ∂r r ∂θ rsinθ ∂φ
∇⋅F =
1 ∂ 2 1 ∂ 1 ∂Fφ (r Fr ) + (sinθ Fθ ) + r 2 ∂r rsinθ ∂θ r sinθ ∂φ
1 er 1 eθ rsinθ ∂ ∂θ rFθ 1 eφ r ∂ ∂φ rsinθ Fφ (r ≠ 0)
(r ≠ 0)
r 2sinθ ∂ ∇× F = ∂r Fr
本章小结 本章小结
CQU
1、场的概念 标量场和矢量场的概念, 标量场和矢量场的概念,矢量场的分类以及每类矢量场的基本 特征。 特征。 2、场的三度计算 标量场的梯度 ∇f 、矢量场的散度 ∇ ⋅ F 和旋度 ∇ × F ; 要求牢记▽算符的矢量特性和微分特性; 要求牢记▽算符的矢量特性和微分特性; 牢固掌握在直角坐标系下的三度计算式,实施正确计算; 牢固掌握在直角坐标系下的三度计算式,实施正确计算; 在其它坐标系下,给定三度的计算式后, 计算场 在其它坐标系下,给定三度的计算式后,会计算场。 三度的计算式后 3、要会进行场的高阶计算 要做到此项,必须牢记矢量的点积、叉积,重要的矢量恒等式。 要做到此项,必须牢记矢量的点积、叉积,重要的矢量恒等式。 4、正确理解高斯散度定理和斯托克斯定理、正确认识赫姆 正确理解高斯散度定理和斯托克斯定理、 霍兹定理。 霍兹定理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
牢固掌握在直角坐标系下的三度计算式,实施正确计算;
在其它坐标系下,给定三度的计算式后,会计算场。
3、要会进行场的高阶计算
要做到此项,必须牢记矢量的点积、叉积,重要的矢量恒等式。
4、正确理解高斯散度定理和斯托克斯定理、正确认识赫姆 霍兹定理。
1.8 圆柱坐标系与球坐标系
1
CQU
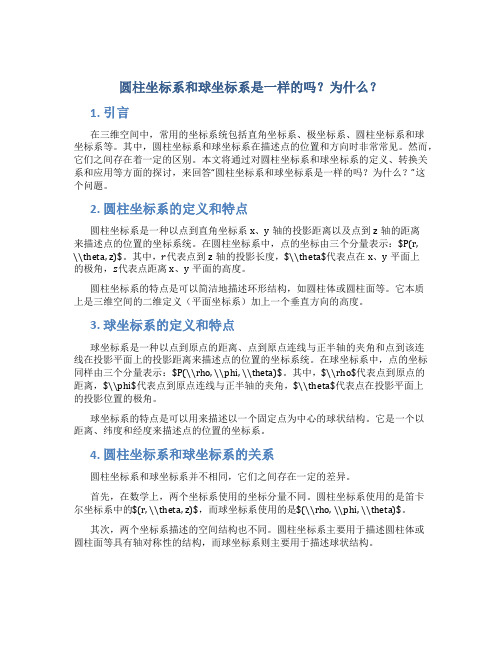
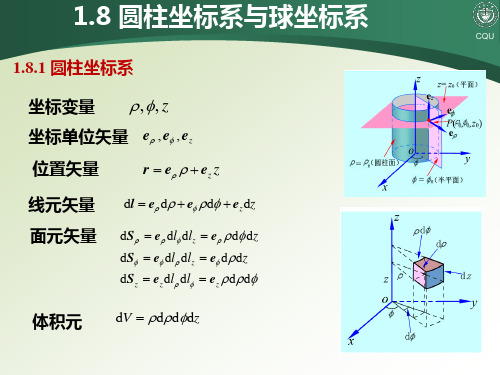
1.8.1 圆柱坐标系
坐标变量 ,, z
坐标单位矢量 e , e , ez
位置矢量
r e ez z
线元矢量 dl ed e d ezdz
面元矢量
dS e dl dlz e ddz dS e dl dlz e ddz dSz ezdl dl ez dd
F (,,z)
z
F F Fz
( 0)
1.8 圆柱坐标系与球坐标系
CQU
1.8.2 球面坐标系
坐标变量 r,,
坐标单位矢量 er , e , e 位置矢量 r er r
线元矢量 dl erdr e rd e rsind
面元矢量
dSr erdl dl er r2sin d d dS e dlrdl ezrsindrd dS edlrdl e rdrd
体积元 dV r2sindrdd
1.8 圆柱坐标系与球坐标系
CQU
三单位矢量e、e和ez有以下特点:
三个单位矢量相互正交,且满足右手关系,即
er eθ e; eθ e er ; e er eθ
球坐标系中的三度表达式
er
r
e
1 r
e
1
rsin
F
1 r2
r
(r2Fr )
1
rsin
(sin F )
r
1
sin
F
(r 0)
1 r2sin er F
r Fr
1 rsin e
rFBiblioteka 1 r e rsin F(r 0)
本章小结
CQU
1、场的概念
标量场和矢量场的概念,矢量场的分类以及每类矢量场的基本 特征。
2、场的三度计算
标量场的梯度 、f 矢量场的散度 和 F旋度
; F
要求牢记▽算符的矢量特性和微分特性;
体积元 dV dddz
1.8 圆柱坐标系与球坐标系
CQU
三单位矢量e、e和ez有以下特点:
① 三个单位矢量相互正交,且满足右手关系
e e e z e ez e e z e e
② 除ez是常矢外,e和e 的方向都有可能随P点的不同 而变化,它们是坐标函数:
e cos ex sin e y e sin ex cos e y
e、e、ez对坐标、、z求偏导
e 0,
e 0,
ez 0,
e
e ,
e
e ,
ez 0,
e 0 z
e z
0
ez 0 z
1.8 圆柱坐标系与球坐标系
CQU
圆柱坐标系中的三度表达式
e
e
1
ez
z
f
f
e
1
f
e
f z
ez
F (,,z)
1
( F )
1
F
Fz z
1
1
e e ez