第六章 特殊功能指令
第6章 S7-300PLC指令系统及编程(1)
“与嵌套”指令用于电路块串联的编程。其指令格式如下: A( ——与嵌套开始指令 )——与嵌套结束指令
图6-6
2、“或嵌套”指令 “或嵌套”指令用于电路块并联的编程。其指令格式如下: O( ——或嵌套开始指令 )——或嵌套结束指令
图6-7
3、说明:先与后或(即电路元件先串后并)可不用嵌套指令中的 括号,如图6-8所示。
3.二分频器程序编写
图6-18 抢答器程序
二分频器是一种具有一个输入端和一个输出端的功能单元,输出频
率为输入频率的一半。实现二分频的方法有很多种,下面介绍其中
两种:
(1)利用“与”“或”指令实现二分频程序。 设输入为I1.0,输出为Q4.0,根据二分频要求I1.0接通2次,Q4.0只接
通1次。其波形如图6-19所示。
②复位/置位的LAD指令只能放在逻辑串的最右端,不能放在逻辑 串的中间,它们也属于输出指令。
③置位指令具有保持功能,即使指定位地址的“位”一直为1,直 到复位指令把它清零。
图6-11说明了复位/置位指令的用法。
图6-11
图6-11的程序中,只要I1.0一闭合,不论I1.0闭合后又断开,Q4.0 一直保持通电状态(1态,直到I2.0闭合且不论闭合后又断开,Q4.0 才断电(0态)。其功能同电动机的起停保控制电路类似。
验灯程序的编写很简单。在
PLC中用1个输入点如I3.7,其外 部连接一个常开按钮。由于I3.7 的内部触点是无数的,控制指示 灯输出点的梯形图上均并联1个 I3.7常开触点,当它闭合时指示 灯均亮,以查验灯的好坏。
2.利用触发器编写第一信号记录程序
图6-17 验灯程序
在工业现场一旦有故障发生可能随之带来多个故障,如果能找出
第六章 特殊功能指令
4. 输入并调试程序
用状态图监视程序的运行,并记录观察到的现象。
6.3 高速计数器与高速脉冲输出
高速计数器(HSC)不受扫描周期的影响,最高计 数频率取决于CPU的类型,CPU22x系列最高计数频率 为30KHz,用于捕捉比CPU扫描周期更快的事件,并产 生中断,执行中断程序,完成预定的操作。高速计数器 最多可设置12种不同的操作模式。 高速脉冲输出可实现高速运动的精确控制。 SIMATIC S7-200 CPU22x系列PLC高速脉冲输出频率可 达20KHz,用于PTO(输出一个频率可调,占空比为 50%的脉冲)和PWM(输出占空比可调的脉冲),高 速脉冲输出的功能可用于对电动机进行速度控制及位置 控制。
各个主机中高速计数器的数量及编号
6.3.2 高速计数器的中断
6.3.2 高速计数器的工作模式
1. 高速计数器的计数方式
(1)单路脉冲输入的内部方向控制加/减计数。即只有一 个脉冲输入端,通过高速计数器的控制字节的第3位来 控制作加计数或者减计数。该位=1,加计数;该位=0, 减计数。如表6-19所示内部方向控制的单路加/减计数 。 (2)单路脉冲输入的外部方向控制加/减计数。即有一个 脉冲输入端,有一个方向控制端,方向输入信号等于1 时,加计数;方向输入信号等于0时,减计数。如图6-7 所示外部方向控制的单路加/减计数。连接文件夹\高速 计数器的技术.doc
(1)可在起用PTO或PWM操作之前,将用于Q0.0和Q0.1的输出映像 寄存器设为0。
(2)PTO/PWM输出必须至少有10%的额定负载,才能完成从关闭至 打开以及从打开至关闭的顺利转换,即提供陡直的上升沿和下降沿
4. PTO的使用
PTO是可以指定脉冲数和周期的占空比为 50%的高速脉冲串的输出。状态字节中的最高 位(空闲位)用来指示脉冲串输出是否完成。 可在脉冲串完成时起动中断程序,若使用多段 操作,则在包络表完成时起动中断程序。
第六章习题参考答案
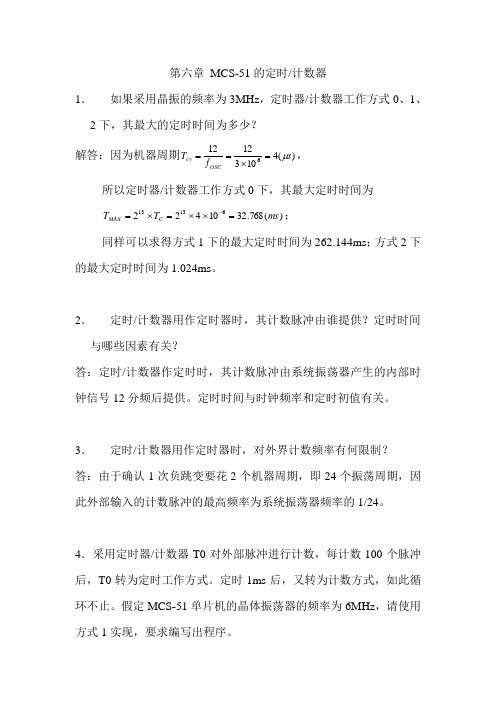
第六章 MCS-51的定时/计数器1. 如果采用晶振的频率为3MHz ,定时器/计数器工作方式0、1、2下,其最大的定时时间为多少? 解答:因为机器周期)(410312126s f T OSC cy μ=⨯==, 所以定时器/计数器工作方式0下,其最大定时时间为)(768.321042261313ms T T C MAX =⨯⨯=⨯=-;同样可以求得方式1下的最大定时时间为262.144ms ;方式2下的最大定时时间为1.024ms 。
2. 定时/计数器用作定时器时,其计数脉冲由谁提供?定时时间与哪些因素有关?答:定时/计数器作定时时,其计数脉冲由系统振荡器产生的内部时钟信号12分频后提供。
定时时间与时钟频率和定时初值有关。
3. 定时/计数器用作定时器时,对外界计数频率有何限制?答:由于确认1次负跳变要花2个机器周期,即24个振荡周期,因此外部输入的计数脉冲的最高频率为系统振荡器频率的1/24。
4.采用定时器/计数器T0对外部脉冲进行计数,每计数100个脉冲后,T0转为定时工作方式。
定时1ms 后,又转为计数方式,如此循环不止。
假定MCS-51单片机的晶体振荡器的频率为6MHz ,请使用方式1实现,要求编写出程序。
解:定时器/计数器T0在计数和定时工作完成后,均采用中断方式工作。
除了第一次计数工作方式设置在主程序完成外,后面的定时或计数工作方式分别在中断程序完成,用一标志位识别下一轮定时器/计数器T0的工作方式。
编写程序如下:ORG 0000HLJMP MAINORG 000BHLJMP IT0PMAIN: M OV TMOD,#06H ;定时器/计数器T0为计数方式2 MOV TL0,#156 ;计数100个脉冲的初值赋值MOV TH0,#156SETB GATE ;打开计数门SETB TR0 ;启动T0,开始计数SETB ET0 ;允许T0中断SETB EA ;CPU开中断CLR F0 ;设置下一轮为定时方式的标志位W AIT: AJMP W AITIT0P: CLR EA ;关中断JB F0,COUNT ;F0=1,转计数方式设置MOV TMOD,#00H ;定时器/计数器T0为定时方式0MOV TH0,#0FEH ;定时1ms初值赋值MOV TL0,#0CHSETB EA RETICOUNT: MOV TMOD,#06HMOV TL0,#156SETB EARETI5. 定时器/计数器的工作方式2有什么特点?适用于哪些应用场合? 答:定时器/计数器的工作方式2具有自动恢复初值的特点,适用于精确定时,比如波特率的产生。
第六章 S7-200PLC特殊功能指令
BLKMOV-DW
EN ENO IN N OUT
数据块传送指令把从输入 (IN)指定地址的N个连续 字节、字、双字的内容传送 到从输出(OUT)指定地址 开始的N个连续字节、字、 双字的存储单元中去。
VB20 VB21 VB22 VB23 VB24
数组1 30
31
32
33Βιβλιοθήκη 34VB100 VB101 VB102 VB103 VB104
LD I0.0 //T37产生周期为 AN T37 0.5s的移位脉冲 TON T37, +5
LD T37 //每来一个脉冲 RLB QB0, 1 彩灯循环左移1位
已知:I0.0接外部开关,Q0.0接指示灯,问下面的梯形图 实现什么功能?
(5)移位寄存器指令 移位寄存器指令可用来进行顺序控制、物流及数据流控制。
SM1.1 移位后 1 1010 1011 0011 0110 VW300
例题:用I0.0控制接在Q0.0~Q0.7上的8个彩灯循环移位,从左
到右以0.5s的速度依次点亮,保持任意时刻只有一个指示灯亮 ,到达最右端后,再从左到右依次点亮。 要求:使用循环移位指令。
LD SM0.1 //首次扫描时 MOVB 1, QB0 //置8位彩灯初态
I0.1
MOV-W
EN ENO
VVDW11000 IN OUT AC0
MSB
VW100
10
LSB
46
MSB AC0
LSB
10 46
MOVW VW100, AC0
若I0.1=1,则将VW100的数据传送到AC0
(2)数据块传送指令
BLKMOV-B
EN ENO IN N OUT
BLKMOV-W
第六章 S7-200PLC特殊功能指令
SWAP
EN IN ENO
VW50 SWAP D6C3
VW50 C3D6
第二节 数学运算指令
1、加法指令
ADD_I ADD_DI ADD_R
EN ENO IN1 IN2 OUT
EN ENO IN1 IN2 OUT
EN ENO IN1 IN2 OUT
加法指令可分为整数、双整数、 实数加法指令; 执行操作:IN1+IN2=OUT。
逻辑运算指令执行表
指令 ANDB ORB XORB
操作数
地址
单元长度
运算前
运算后
IN1
IN2(OUT) IN1
VB0
AC0 VB0
1
1 1
00110011
11110000 00110011
00110011
00110000 00110011
IN2(OUT)
IN1 IN2(OUT)
AC1
VB0 AC2
1
使能输入有效时,将整数型输入
数据IN转换成字节类型,并将结果 送到 OUT 输出。输入数据超出字 节范围(0~255)则产生溢出 。
(二)双字整数与整数的转换
使能输入有效时,将双整数型输
入数据IN转换成整数类型,并将结 果送到OUT输出。被转换的输入值 应是有效的双字整数。输入数据超 出整数范围则产生溢出。
LD T37 //每来一个脉冲 RLB QB0, 1 彩灯循环左移1位
已知:I0.0接外部开关,Q0.0接指示灯,问下面的梯形图 实现什么功能?
(5)移位寄存器指令 移位寄存器指令可用来进行顺序控制、物流及数据流控制。
I0.1 正跳变 I0.2
S_BIT指定移位寄存器的 最低位,N指定寄存器的 长度;正数表示正向移动 (低字节→高字节),N 为负数表示反向移动; N 为字节型数据类型,最大 长度为64位。EN端每个 上升沿采样。
特殊应用指令介绍
输出点驱动注意:
以下图为例,步进点之后,新母线开始第二行一旦输入 LD 或 LDI 指令后, 就不能再从新母线直接连接输出线圈,梯形图编译会产生错误。须修改成 如下图右才可正确编译。
其它注意事项
一般来说,转移到下一个状态的指令(SET S□或 OUT S□)最好是在目前这个状态 中,所有的相关输出及动作都完成后才执行,如下图所示,以 PLC 执行结果并无 不同,但若 S10 这个状态内有很条件或动作,建议可将左图改成右图,所有的相关 输出及动作都完成后才执行 SET S20,这样顺序的流程较清楚。
OUT Sn: 同一流程中返回初始步进点,同一流程中的步进点向上或向下非相邻
的步进点跳转及不同流程用来驱动分离步进点,状态转移后,之前所有动作状态 点的所有输出会被清除。
(1) 同一流
程中返回初 始步进点。 (2)同一流程 中的步进点 向上或向下 非相邻的步 进点跳转。
(3)不同流程用来驱动分离步进点。
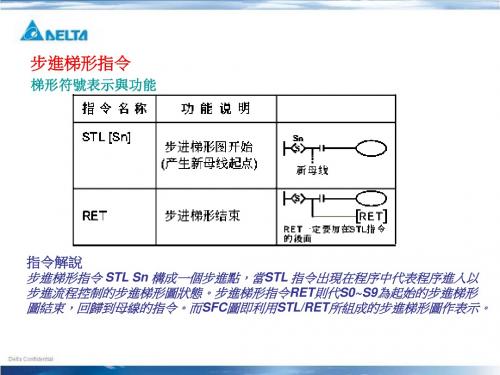
步進梯形指令
梯形符號表示與功能
指令解說
步進梯形指令 STL Sn 構成一個步進點,當STL 指令出現在程序中代表程序進入以 步進流程控制的步進梯形圖狀態。步進梯形指令RET則代S0~S9為起始的步進梯形 圖結束,回歸到母線的指令。而SFC圖即利用STL/RET所組成的步進梯形圖作表示。
步进指令和SFC编程介绍
范例(ASCII模式)
PLC→VFD-S,PLC 传送:“ 01 06 0100 1770 71 ” VFD-S→PLC,PLC 接收:“ 01 06 0100 1770 71 ”
ASCII
模 式
范例(RTU模式)
RTU
模 式
MODBUS读/写指令
支援H03,H05,H06,H10功能码。功能码的具体含义,请各位参照标准 modbus协议手册
第六章 可编程控制器的基本指令 1、西门子S7-200系列和三菱FX2N系列PLC

PLC的编程语言
IEC1131-3是国际电工委员会制订的可编程控制器的 编程语言标准。 共规定了五种编程语言。
1、梯形图(Ladder diagram) 2、功能块图(Function block diagram) 3、指令表(Instruction list)
4、结构文本(structured text) 5、顺序功能图(Sequential function chart)
FX的扩展
1、2 :扩展单元和扩展模块 3、4:模拟量、定位控制、高速计数器等 5:特殊串行通信适配器
S7-200的网络应用(PPI)
PPI:点对点通信。只有图中的PC机 才能发出通信请求。 这种方式可实现程序的下载和上传, 利用PC对多台PLC进行编程和调试。
S7-200的网络应用(MPI)
CPU 226 24 16
DC/DC/DC AC/DC/继电器
0 256 0 2 256 0 7 256 0 7 256 0 7 256 064
FX常用指标
继电器输出 FX2N-16MR-001 FX2N-32MR-001 FX2N-48MR-001 FX2N-64MR-001 FX2N-80MR-001
EM223 4DI 4DO
EM221 8DI
EM235 4AI 1AQ
EM222 8DO
EM235 4AI 1AQ
I0.0 Q0.0 I2.0 Q2.0 I3.0 I0.7 Q0.7 I2.3 Q2.3 I3.7 I1.0 Q1.0 I2.4 Q2.4 I1.5 Q1.1 I2.7 Q2.7 I1.6 Q1.2 I1.7 Q1.7
每个定时器设一个字单元存储设定值,一个字单元计数脉
冲数,另一个位单元是状态标志,定时到,该位被置成1
第六章5循环移位指令
• 带进位循环右移RCR(Rotation Right with Carry) • 带进位循环左移RCL(Rotation Left with Carry)
执行这两条指令时,各位的数据与进位位M8022一起(16位指令时一共17
位)向右(或向左)循环移动n位(见图)。
三、位右移和位左移指令 • 位右移SFTR(Shift Right) • 位左移 SFTL(Shift Left) 操作数 [S]: X、Y、M、S [D]:Y、M、S
实现位元件中的状态成 组地向右或向左移动
说明: 位元件组的长度由n1指定,n2指定移 动的位数。
梯形图
图中X010由OFF变为ON时,位右移指令(3位1组)按以下顺序移位:M2~M0中 的数溢出,M5~M3→M2~M0,M8~M6→M5~M3,X002~X0000→M8~M6。 图b中的X010由OFF变为ON时,位左移指令按图中所示的顺序移位。
Y2 0 0 0 1 1 0 0
Y1 0 0 1 1 0 0 1
Y0 0 1 1 0 0 1 1
M0 1 1 0 0 1 1 0 循 环
(c)四台水泵运行梯形图
图
四台水泵轮流工作实例
2.位左移指令SFTL举例
【例题】 位左移指令SFTL的程序梯形图如图所示。设Y17~Y0的初 始状态为0,X3~X0的位状态为1011。求数次执行位左移指令SFTL后, Y17~Y0各位状态的变化。
(1)位右移说明: 当操作条件满足时,位右移指令在n1个指定目标位元件中,右移n2个指 定的源元件位元件状态。即n2位[S.] 状态右移到n1位[D.],从n1位目标元件 的高位进去,而其低位溢出。 上述的示例程序操作。位右移的目标元件为:M10~M25,源元件为: X0~X1,当X1由“0”变“1”时,X1、X0的状态传到M25、M24,原来的 M25、M24移到M23、M22…以此类推,M11、M10丢失。由图示的方法说 明状态的变化。 由于连续型操作,每个扫描周期都进行操作,合上一瞬间,就把原操作数状 态都移位了。建议使用SFTRP,SFTLP,便于控制。
第六章S7200功能指令及使用

1.四则运算指令—除法指令
除法指令对两个输入端(IN1,IN2)指定的有符号 数进行相除操作,结果送到输出端(OUT)。 除法指令可分为整数、双整数、实数除法指令和整 数完全除法指令。 前三种指令各自对应的操作数分别为有符号整数、 有符号双整数、实数。整数完全除法指令,把输入端
指定的两个16位整数相除,产生一个32位结果,并送
语句表:INCB OUT 功能:当EN=1时,将单字节长的无符号字节型输入 数IN加1,结果为单字节长无符号整数存入OUT 。
1.四则运算指令—加1指令
②字加1指令 梯形图:
语句表:INCW OUT 功能:当EN=1时,将单字长的有符号输入数IN加1, 结果为单数学功能指令—自然指数指令
梯形图:
语句表: EXP IN, OUT 功能:当EN=1时,将32位的实数IN取e为底的指数, 结果为32的实数存入OUT 。
2.数学功能指令—自然对数指令
梯形图:
语句表: LN IN, OUT 功能:当EN=1时,将双字长的实数IN取自然对数, 结果为32的实数存入OUT 。
1.四则运算指令—减法指令
减法指令对两个输入端(IN1,IN2)指定的有符号 数进行相减操作,结果送到输出端(OUT)。 减法指令可分为整数、双整数、实数减法指令,它 们各自对应的操作数分别是有符号整数、有符号双整 数、实数。
在LAD中,执行结果为IN1-IN2→OUT;
在STL中,通常将操作数IN1与OUT共用一个地址单 元,因而执行结果为OUT-IN2→OUT。
1.四则运算指令—减法指令
③实数减法指令 梯形图:
语句表:-R IN2, OUT 功能:当EN=1时,将两个32位实数IN1和IN2相减, 结果为32位实数存入OUT 。
FX系列PLC应用指令

二、二进制加1减1指令
加1 FNC24 INC 减1 FNC25 DEC
❖ 操作数 [D]:KnY、KnM、KnS、T、C、D、V,Z ❖ 梯形图
X0
[D]
INC(P) D10
X1
[D]
DEC(P) D12
(D10)+1 (D10)
(D12)–1
(D12)
❖ 阐明
➢ 该指令把源操作数[S]中旳数据各位取反(1→0, 0→1)后传送到目旳操作数[D]中去。
➢ 该指令能够16/32位数据处理和连续/脉冲执行方式
❖ 梯形图
X0
[S] [D]
CML D0 K1Y0
101010101010 1010
符号位
取反传送
保持不变
0101 Y3 Y0
(D0)
(K1Y0)
若源操作数中旳数为 十进制常数时,将自动
❖ 执行方式 ➢ 连续执行方式:每个扫描周期都反复执行一次 ➢ 脉冲执行方式:只在信号OFF→ON时执行一次, 在指令后加P(Pulse)。
X0 MOV
X1 MOVP
D0
D1
D2 D4
四、变址寄存器V、Z
❖ 变址:变化操作数旳地址 ❖ 变址寄存器旳作用:存储变化地址旳数据 ❖ 实际地址=目前地址+变址数据 ❖ 32位运算时V和Z组合使用,V为高16位,Z为低16位。
和H(十六进制)表达,两个或
两个以上时为m1、m2、n1、n2。
X0
MOV D0 D1
(D0)→(D1)
二、数据格式
❖ 位元件:只处理开关(ON/OFF)信息旳元件,如X、 Y、M、D、S
➢ 字元件:处理数据旳元件,如D。
PLC第六章2

DIV-I EN ENO IN1 OUT IN2 /I IN1, OUT
DIV-DI EN ENO IN1 OUT IN2 /D IN1, OUT
DIV EN ENO IN1 OUT IN2 DIV IN1, OUT
返回
• 【例6-8】 在输入信号I0.4的上升沿,用模拟电位器0来设置 定时器T37的设定值(5~20s),即从SMB28读出的数字0~ 255对应于5~20s。设读出的数字为N,100ms定时器的设定 值为 • (200–50)×N / 255+50 =150×N / 255+50 (0.1s) • 网络1 • LD I0.4 • EU // 在I0.4的上升沿 • MOVB SMB28, AC0 • MUL +150, AC0 // 150乘以模拟电位器的转换 值 • /D +255, AC0 // 除以255,双整数除 法 • +I +50, AC0 // 加偏移量50(5s) • MOVW AC0, VW10 • 网络2 • LD I0.5 • TON T37, VW10 // T37以VW10中的数 值为设定值
链接 链接
2.高速计数器的工作模式
表7-1 高速计数器的工作模式和输入端子的关系 功能及说明 HSC0 高速计数器 HSC的 工作模 式 高速 I0.0 占用的输入端子及其功能 I0.1 I0.2 ×
HSC4 计 数 器 编 号
HSC1 HSC2 HSC3 HSC5
I0.3
I0.6 I1.2 I0.1 I0.4
6.5.3 逻辑运算指令
• • • • • • • 【例6-9】在I0.0的上升沿执行下面程序中的逻辑运算,运算 前后各存储单元中的值如图6-27所示。 LD I0.0 EU INVB VB0 // 字节取反指令 ANDB VB1, VB2 // 字节与指令 ORB XORB VB3, VB4 VB5, VB6 // 字节或指令 // 字节异或指令
FANUC机器人程序员A 讲义6(第六章)

7: PR[14,2]=PR[11,2]+100 8:J PR[11] 100% FINE
PR[14]=PR[13] PR[14,1]=PR[13,1]-100
9:L PR[12] 2000mm/sec FINE 10:L PR[13] 2000mm/sec FINE 11:L PR[14] 2000mm/sec FINE 12:L PR[11] 2000mm/sec FINE
P点所记录的坐标系号
当前有效的坐标系号
17
以当前有效坐标系 为参考坐标
三、指令
请注意: 使用PR[i]时,需提前声 明其参考的USER和 TOOL坐标系号,否则 可能引起错误甚至危险 的发生!
18
三、指令
19
运行速度
三、指令
运行速度
速度倍率 实际的运行速度 = 运行速度 X 速度倍率
20
定位类型
8:L P[4] 2000mm/sec FINE
9:RO[1]=OFF 10:WAIT 0.5sec
手抓动作, 放置工件
11:L P[3] 2000mm/sec CNT50
12:L PR[1:HOME] 2000mm/sec
FINE
34
休息片刻
Rest for a while
35
3、条件比较指令 IF
4
二、指令的编辑
在光标前插入空白行,可同时插入几行 删除程序语句,可选择删除的范围 复制/黏贴程序语句,复制一次,可黏贴多次 检索程序指令的要素(如IO、R[i]等) 替换程序指令要素 使位置号码依序排列 显示/隐藏IO指令或寄存器指令的注解 撤销最后上一步操作 将程序指令注解化或者解除注解化
5
第6章S7-300PLC指令系统及编程(1).
图6-24 两个字间的 AW指令的操作
例2 使用32位常数异或XOD指令的示例。该程序实现了累加器与
指令中给出的32位常数的异或逻辑运算。
L MD10
//把存储区双字MD10的内容写入累加器1
XOD DW#16#ABCD_1978 //把累加器1的内容与DW#16#ABCD_1978
按位进行异或逻辑运算,结果放在累加器1中
一个正跳沿,Q4.0便反转一次。因此只要设计一个反转程序,每测 得一个正跳沿则进行一次反转,没有正跳沿则不执行反转。具体程 序如图5-21所示(用了跳转指令)。
图6-21 二分频器程序之二
4.往复运动小车控制程序的编写 一小车由电动机拖动,启动后小车自动前进,至指定位置又自动
退回到起始位置,然后又前进,如此反复运行直至命令停止。根据 上述控制要求对I/O点分配如下。小车控制程序如图5-22所示。
STL L MW10 L MW20
AW
T MW12
//把存储字MW10的内容写入累加器1低字中
//把存储字MW20的内容写入累加器1低字中,累加器1原内 容移至累加器2
//累加器1、2低字内容逐位进行“与”逻辑运算,结果存放 在累加器1低字中
//把累加器1低字中内容传送至存储区MW12中
设MW10、MW20的存储内容如图6-24所示,按位进行与运算后, 存入MW12的内容亦示于图6-24中。
T MD14
//把累加器1中内容传送至存储区双字MD14
中设MD10的存储内容如图5-25所示,与异或XOD指令中常数按位进
行异或运算后,传入存储双字MD14的内容亦示于图5-25中。
图5-25 32位常数XOD指令的操作
(二)字逻辑梯形图方块指令 上述字逻辑语句表指令都有对应的梯形图方块指令,梯形图方块
6其他功能指令
100 实际轨迹
30 20 50 150
其他功能指令
5、准停检验G09
格式:G09 说明:一个包括G09的程序段在继续执行下个程序段 前,准确停止在本程序段的终点。该功能用于加工尖锐 的棱角。
极坐标指令
6、极坐标指令G38 编程时,坐标值可以用极坐标半径和角度输入,角度的正向是所 选平面的第1轴正方向的逆时针转向,负向是顺时针转向。半径和角度两 者可以用绝对值指令(G90)或增量值指令(G91)指定。 格式:G38 X—Y— G01 AP=—RP=—;或G02(G03)AP=—RP=—R—; 说明:G38:极坐标有效,定义极点。 X、Y:极点在工件坐标系下的坐标值。
极坐标指令
例2:图示曲线顺时针,每增加10°极半径增大2mm。
%0001 G54 G00 X-15 Y-15 Z10 G01 Z-3 F300 GO1 G41 X0 D01 Y50 G38 X42 Y50 #0=180 #1=42 WHILE #0 GT 0 GO1 AP=[#0] RP=[#1] #0=#0-10 #1=#1+2 ENDW G01 AP=0 RP=78 Y0 X-15 G40 Y-15 G00 Z100 M30
AP=:终点的极角。
RP=:终点的极半径。 注意:极坐标指令编程可与工件坐标指令编程混用。
极坐标指令
例1 G54 X0 Y0 Z10 G00 X-50 Y-60 G00 Z-3 GO1 G41 X-42 D01 F800 Y0 G38 X0 Y0 GO2 AP=0 RP=42 R42 GO1 Y-50 X-50 G00 G40 Y-60 Z10 G00 X0 Y0 M30
P:指定暂停时间,单位为秒。
回参考点控制指令
2、自动返回到参考点G28
第6章 特殊功能指令
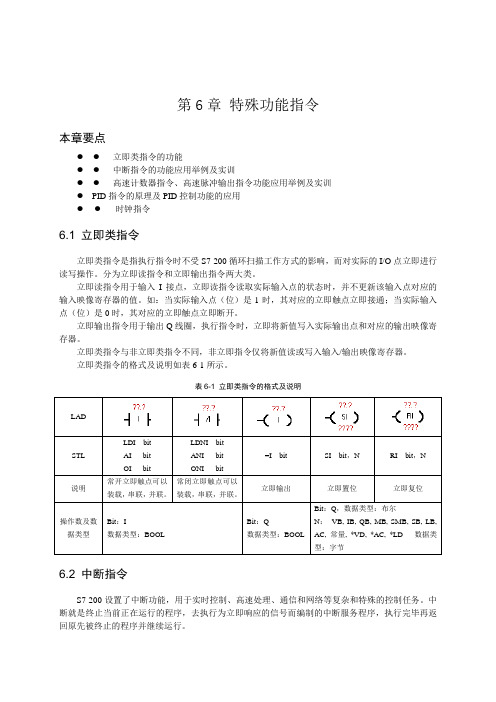
第6章特殊功能指令本章要点●●立即类指令的功能●●中断指令的功能应用举例及实训●●高速计数器指令、高速脉冲输出指令功能应用举例及实训●PID指令的原理及PID控制功能的应用●●时钟指令6.1 立即类指令立即类指令是指执行指令时不受S7-200循环扫描工作方式的影响,而对实际的I/O点立即进行读写操作。
分为立即读指令和立即输出指令两大类。
立即读指令用于输入I接点,立即读指令读取实际输入点的状态时,并不更新该输入点对应的输入映像寄存器的值。
如:当实际输入点(位)是1时,其对应的立即触点立即接通;当实际输入点(位)是0时,其对应的立即触点立即断开。
立即输出指令用于输出Q线圈,执行指令时,立即将新值写入实际输出点和对应的输出映像寄存器。
立即类指令与非立即类指令不同,非立即指令仅将新值读或写入输入/输出映像寄存器。
立即类指令的格式及说明如表6-1所示。
表6-1 立即类指令的格式及说明LADSTL LDI bitAI bitOI bitLDNI bitANI bitONI bit=I bit SI bit,N RI bit,N说明常开立即触点可以装载,串联,并联。
常闭立即触点可以装载,串联,并联。
立即输出立即置位立即复位操作数及数据类型Bit:I数据类型:BOOLBit:Q数据类型:BOOLBit:Q,数据类型:布尔N:VB, IB, QB, MB, SMB, SB, LB,AC, 常量, *VD, *AC, *LD 数据类型:字节6.2 中断指令S7-200设置了中断功能,用于实时控制、高速处理、通信和网络等复杂和特殊的控制任务。
中断就是终止当前正在运行的程序,去执行为立即响应的信号而编制的中断服务程序,执行完毕再返回原先被终止的程序并继续运行。
6.2.1 中断源1. 中断源的类型中断源即发出中断请求的事件,又叫中断事件。
为了便于识别,系统给每个中断源都分配一个编号,称为中断事件号。
S7-200系列可编程控制器最多有34个中断源,分为三大类:通信中断、输入/输出中断和时基中断。
第6-1章功能指令

2012年6月15日星期五
第六章 功能指令
4
MITSUBISHI ELECTRIC
Changes for the better
位元件组合成的字元件
• 4个连续编号的位元件可以组合成一组组合单元,KnX、KnY、KnM、KnS中的 n为组数,
•
• •
例K2Y0由Y7~Y0组成的2个4位字元件。Y0为低位,Y7为高位。用它可以表 示2位10进制数或2位16进制数,也可以表示8位2进制数。
x0x1x2x3x4x5x6x7cjp0x10x11x12y1m1s1t0rstrstx13rstk10k11k10000t246t246c0c0cjp0p1rstmovd0d1p1t246c0x0y1跳转前接点状态跳转后接点状态跳转后线圈状态元件x1x2x3x4x5x6x7x10x11x1x2x3x4x5x7x10x11x1x2x3x4x6x10x11x1x2x3x4x10x11断开断开断开闭合闭合闭合y1m1s1y1m1s110ms100ms1ms定时器定时器定时器中断x0计数器定时器不动作断开断开断开闭合闭合定时器不动作断开后继续计时x6x6计数器不动作断开定时器中断x0断开后继续计时闭合断开闭合断开闭合断开计数器中断x0断开后继续计数除fnc5259之外其它指令不执行功能指令闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开闭合或断开条件跳转对元件的影响mitsubishielectricchangesbetter2013年1月25日星期五第六章功能指令14在同时使用主控指令与跳转指令的时候应注意以下几点如图66所cjp0cjp1cjp2cjp3p0p1p2p3mcn0m0mcrn0cjp4p4mcn0m2mcn0m1mcrn0mcrn06主控指令与跳转指令的关系mitsubishielectricchangesbetter2013年1月25日星期五第六章功能指令154应用实例例61手动自动控制方式选择x0cjp0cjp0p63x0自动控制程序手动控制程序end当x00时执行自动控制程序当x01时执行手动控制程序7跳转指令应用实例mitsubishielectricchangesbetter2013年1月25日星期五第六章功能指令16622子程序调用call子程序返回sret和主程序结束指令fend4指令说明callp指令格式pnpnp0p62p64p1271步fnc01sret指令格式fnc02fend指令格式fnc06mitsubishielectricchangesbetter2013年1月25日星期五第六章功能指令17在子程序中调用另一个子程序其嵌套子程序可达5级call指令可用4次在调用子程序和中断子程序中可采用t192t199或t246t249作为定时器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6.2.4 程序举例
【例6-1】编写由I0.1的上升沿产生的中断事件 的初始化程序。连接文件夹\练习题6-1.doc 【例6-2】编程完成采样工作,要求每10ms采 样一次。连接文件夹\练习题6-2.doc 【例6-3】利用定时中断功能编制一个程序,实 现如下功能:当I0.0由OFF→ON,Q0.0亮1s, 灭1s,如此循环反复直至I0.0由ON→OFF, Q0.0变为OFF。连接文件夹\练习题6-3.doc
2. 高速计数器的工作模式
高速计数器有12种工作模式,模式0~模式2采用单路脉 冲输入的内部方向控制加/减计数;模式3~模式5采用单 路脉冲输入的外部方向控制加/减计数;模式6~模式8采 用两路脉冲输入的加/减计数;模式9~模式11采用两路 脉冲输入的双相正交计数。 S7-200 CPU224有 HSC0-HSC5六个高速计数器,每个 高速计数器有多种不同的工作模式。连接文件夹\表 61.docHSC0选用某个高速计数器在某种工作方式下工 作后,高速计数器所使用的输入不是任意选择的,必须 按系统指定的输入点输入信号。如HSC1。
第6章 特殊功能指令
6.1 立即类指令
立即读 \立即输出
立即读指令用于输入I接点,立即读指令读取实际输入点 的状态时,并不更新该输入点对应的输入映像寄存器的 值。如:当实际输入点(位)是1时,其对应的立即触点 立即接通;当实际输入点(位)是0时,其对应的立即触 点立即断开。
立即输出指令用于输出Q线圈,执行指令时,立即将新 值写入实际输出点和对应的输出映像寄存器。
2. 状态字节
每个高速计数器都有一个状态字节,状态位表示 当前计数方向以及当前值是否大于或等于预置值。 每个高速计数器状态字节的状态位如表6-8连接 文件夹\10.doc。
6.3.4 高速计数器指令及举例
1两条:高速计数器定义指令HDEF如 表6-9连接文件夹\表63.doc(1)高速计数器定义指令 HDEF。指令指定高速计数器(HSCx)的工作模式。工 作模式的选择即选择了高速计数器的输入脉冲、计数方 向、复位和起动功能。每个高速计数器只能用一条“高 速计数器定义”指令。 (2)高速计数器指令HSC。根据高速计数器控制位的 状态和按照HDEF指令指定的工作模式,控制高速计数 器。参数N指定高速计数器的号码。
3. 高速计数器指令的初始化
高速计数器指令的初始化的步骤如下: 连接文 件夹\表格65.doc
2. 用于脉冲输出(Q0.0或Q0.1)的特 殊存储器
(1)控制字节和参数的特殊存储器
每个PTO/PWM发生器都有连接文件夹\66.doc
(2)状态字节的特殊存储器
除了控制信息外,还有用于PTO功能的状态位, 如表6-12所示。程序运行时,根据运行状态使某 些位自动置位。可以通过程序来读取相关位的状 态,用此状态作为判断条件,实现相应的操作。
2. 高速脉冲输出占用的输出端子
S7-200有PTO、PWM两台高速脉冲发生器。 PTO脉冲 串功能可输出指定个数、指定周期的方波脉冲(占空比 50%);PWM功能可输出脉宽变化的脉冲信号,用户可 以指定脉冲的周期和脉冲的宽度。若一台发生器指定给 数字输出点Q0.0,另一台发生器则指定给数字输出点 Q0.1。当PTO、PWM发生器控制输出时,将禁止输出 点Q0.0、Q0.1的正常使用;当不使用PTO、PWM高速 脉冲发生器时,输出点Q0.0、Q0.1恢复正常的使用,即 由输出映像寄存器决定其输出状态。
4. 输入并调试程序
用状态图监视程序的运行,并记录观察到的现象。
6.3 高速计数器与高速脉冲输出
前面讲的计数器指令的计数速度受扫描周期的影响,对比CPU扫描 频率高的脉冲输入,就不能满足控制要求了。为此,SIMATIC S7200系列PLC设计了高速计数功能(HSC),其计数自动进行不受 扫描周期的影响,最高计数频率取决于CPU的类型,CPU22x系列 最高计数频率为30KHz,用于捕捉比CPU扫描速更快的事件,并产生 中断,执行中断程序,完成预定的操作。高速计数器最多可设置12 种不同的操作模式。用高速计数器可实现高速运动的精确控制。 SIMATIC S7-200 CPU22x系列PLC还设有高速脉冲输出,输出频率 可达20KHz,用于PTO(输出一个频率可调,占空比为50%的脉冲) 和PWM(输出占空比可调的脉冲),高速脉冲输出的功能可用于对 电动机进行速度控制及位置控制和控制变频器使电机调速。
6.2.2 中断指令
中断指令有4条,包括开、关中断指令,中断连接、 分离指令。指令格式如表6-4所示连接文件夹\表 60.doc。
1. 开、关中断指令
开中断(ENI)指令全局性允许所有中断事件。 关中断(DISI)指令全局性禁止所有中断事件, 中断事件的每次出现均被排队等候,直至使用全 局开中断指令重新启用中断。 PLC转换到RUN(运行)模式时,中断开始时 被禁用,可以通过执行开中断指令,允许所有中 断事件。执行关中断指令会禁止处理中断,但是 现用中断事件将继续排队等候。
立即类指令与非立即类指令不同,非立即指令仅将新 值读或写入输入/输出映像寄存器。
表6-1 立即类指令的格式及说明
6.2 中断指令
6.2.1 中断源
1. 中断源的类型
中断源即发出中断请求的事件,又叫中断事件。 为了便于识别,系统给每个中断源都分配一个编号, 称为中断事件号。S7-200系列可编程控制器最多有 34个中断源,分为三大类:通信中断、输入/输出 中断和时基中断。
2. 建立中断程序的方法
方法一:从“编辑”菜单→选择插入(Insert)→ 中断 (Interrupt)。 方法二:从指令树,用鼠标右键单击“程序块”图标并 从弹出菜单→选择插入(Insert)→ 中断(Interrupt)。 方法三:从“程序编辑器”窗口,从弹出菜单用鼠标右 键单击插入(Insert)→ 中断(Interrupt)。 程序编辑器从先前的POU显示更改为新中断程序,在程 序编辑器的底部会出现一个新标记,代表新的中断程序。
6.2.3 中断程序
1. 中断程序的概念
中断程序是为处理中断事件而事先编好的程序。 中断程序不是由程序调用,而是在中断事件发生 时由操作系统调用。在中断程序中不能改写其他 程序使用的存储器,最好使用局部变量。中断程 序应实现特定的任务,应“越短越好”,中断程 序由中断程序号开始,以无条件返回指令 (CRETI)结束。在中断程序中禁止使用DISI、 ENI、HDEF、LSCR和END指令。
6.3.2 高速计数器的工作模式
1. 高速计数器的计数方式
(1)单路脉冲输入的内部方向控制加/减计数。即只有 一个脉冲输入端,通过高速计数器的控制字节的第3位 来控制作加计数或者减计数。该位=1,加计数;该位=0, 减计数。如图6-6所示内部方向控制的单路加/减计数 。 (2)单路脉冲输入的外部方向控制加/减计数。即有一 个脉冲输入端,有一个方向控制端,方向输入信号等于 1时,加计数;方向输入信号等于0时,减计数。如图67所示外部方向控制的单路加/减计数。连接文件夹\高速 计数器的技术.doc
2. 中断优先级和排对等候
优先级是指多个中断事件同时发出中断请求时,CPU对 中断事件响应的优先次序。S7-200规定的中断优先由高 到低依次是:通信中断、I/O中断和定时中断。每类中断 中不同的中断事件又有不同的优先权,如表6-2所示。 一个程序中总共可有128个中断。S7-200在中断各自的优 先级组内按照先来先服务的原则为中断提供服务。在任 何时刻,只能执行一个中断程序。一旦一个中断程序开 始执行,则一直执行至完成。不能被另一个中断程序打 断,即使是更高优先级的中断程序。中断程序执行中, 新的中断请求按优先级排队等候。中断队列能保存的中 断个数有限,若超出,则会产生溢出。中断队列的最多 中断个数和溢出标志位如表6-3所示。
2. 中断连接、分离指令
中 断 连 接 指 令 ( ATCH) 指 令 将 中 断 事 件 (EVNT)与中断程序号码(INT)相连接,并 启用中断事件。 分 离 中 断 ( DTCH) 指 令 取 消 某 中 断 事 件 (EVNT)与所有中断程序之间的连接,并禁用 该中断事件。 注意:一个中断事件只能连接一个中断程序,但 多个中断事件可以调用一个中断程序。
(1)通信中断
在自由口通信模式下,用户可通过编程来设置波 特率、奇偶校验和通信协议等参数。用户通过编 程控制通讯端口的事件为通信中断。
(2)I/O中断
I/O中断包括外部输入上升/下降沿中断、高速 计数器中断和高速脉冲输出中断。S7-200用输 入(I0.0、I0.1、I0.2或I0.3)上升/下降沿产生 中断。这些输入点用于捕获在发生时必须立即处 理的事件。高速计数器中断指对高速计数器运行 时产生的事件实时响应,包括当前值等于预设值 时产生的中断,计数方向的改变时产生的中断或 计数器外部复位产生的中断。脉冲输出中断是指 预定数目脉冲输出完成而产生的中断。
6.3.3 高速计数器的控制字和状态字
1. 控制字节
定义了计数器和工作模式之后,还要设置高速计 数器的有关控制字节。每个高速计数器均有一个 控制字节,它决定了计数器的计数允许或禁用, 方向控制(仅限模式0、1和2)或对所有其他模 式的初始化计数方向,装入当前值和预置值。控 制字节每个控制位的说明如表6-7所示。
2. 高速计数器指令的使用
1)每个高速计数器都有一个32位当前值和一个32位预置值,当前值和预 设值均为带符号的整数值。要设置高速计数器的新当前值和新预置值,必 须设置控制字节(表6-7)连接文件夹\表64.doc,令其第五位和第六位为1, 允许更新预置值和当前值,新当前值和新预置值写入特殊内部标志位存储 区。然后执行HSC指令,将新数值传输到高速计数器。当前值和预置值占 用的特殊内部标志位存储区如表6-10所示。除控制字节以及新预设值和当 前值保持字节外,还可以使用数据类型HC。 (2)执行HDEF指令之前,必须将高速计数器控制字节的位设置成需要的 状态,否则将采用默认设置。默认设置为:复位和起动输入高电平有效, 正交计数速率选择4×模式。执行HDEF指令后,就不能再改变计数器的设 置,除非CPU进入停止模式。 (3)执行HSC指令时,CPU检查控制字节和有关的当前值和预置值。