真空吸附式爬壁机器人设计
爬壁幕墙清洗机器人设计说明书

江西省第二届大学生机械创新设计大赛暨第三届全国大学生机械创新设计大赛江西赛区选拔赛设计说明书INSTRUCTION OF DESIGN作品名称“小蜘蛛”幕墙攀爬清洗机参赛队伍陈明登谢信韦冯江涛刘连杰郭晓欢指导老师李国臣吴文通参赛单位井冈山大学2008年4月18日目录摘要 (i)小蜘蛛幕墙攀爬清洗机设计说明书............................. 错误!未定义书签。
作品内容简介 (4)1 研制背景及意义........................................... 错误!未定义书签。
2 主要功能和性能指标 (2)3 设计方案 (3)3。
1 机械机构 (3)3.2 控制机构 (3)4 理论设计计算 (4)4.1 真空吸附力计算 (4)4.2 幕墙清洗机器人附着的力学分析 (5)5机构设计与工作原理 (7)5。
1攀爬机构........................................... 错误!未定义书签。
5.2清洗机构 (8)5.3铰接连杆支撑机构.................................... 错误!未定义书签。
5。
4换气机构........................................... 错误!未定义书签。
6创新点及应用 (10)7作品实物工作图........................................... 错误!未定义书签。
8应用前景................................................. 错误!未定义书签。
参考文献................................................... 错误!未定义书签。
摘要:“小蜘蛛”幕墙攀爬清洗机是基于昆虫攀爬动作的仿生原理制作而成.在国内外现有的壁面移动机器人研究成果的基础上,结合高空作业的特点,在对幕墙清洗机器人的共性问题—附着技术、爬行技术、清洗技术进行分析的基础上。
真空吸附式壁面清洗机器人结构设计与研究的开题报告

真空吸附式壁面清洗机器人结构设计与研究的开题报告一、选题背景近年来,随着城市智能化水平的不断提高,机器人技术在日常生活中的应用也越来越广泛。
机器人清洁、机器人保洁等领域的发展,极大地方便了人们的生活。
然而,在日常家庭清洁方面,传统的清洁工具往往效率低、费时费力,无法满足人们的需求。
因此,设计一种具有清洁效率高、易操作、能适应不同墙面的机器人成为现代生活中的一项必要需求。
二、研究内容本次课题旨在设计一种真空吸附式壁面清洗机器人,实现对不同墙面、地面的清洁作业。
主要包括以下内容:1.机器人运动轨迹设计。
考虑机器人在墙面上运动时的稳定性、机动性等因素,合理安排机器人的行进路线。
2.机器人结构设计。
机器人应具有良好的吸附性能、便于操作、易于维护等特点。
采用先进的真空吸附技术,让机器人能够在墙面上牢固的吸附,不易掉落。
3.机器人操作系统设计。
采用机器人操作系统,实现对机器人的远程控制,方便用户进行操作。
4.机器人安全保护设计。
考虑到机器人在作业过程中可能存在掉落、碰撞等因素,应设计有效的安全保护措施,保证机器人操作过程的安全性。
三、研究意义本次课题的成果将会在以下方面产生积极的影响:1.提高家庭和公共场所的清洁效率,减轻人力成本。
使清洁工作更加自动化,同时也节省了清洁人员的时间和精力。
2.加速机器人技术在清洁维护领域的推广。
实现机器人清洁模式,能够鼓励更多人研究机器人清洁技术,推进机器人技术发展。
3.提升城市的智能化水平,为人们打造更加美好的居住环境。
四、研究方法本次研究采用文献综述、实验研究和控制系统设计方法。
具体包括:1.文献综述:对相关的机器人技术、真空吸附技术、控制系统技术进行文献综述,深入了解相关技术的研究现状和发展趋势,为后续研究提供理论基础。
2.实验研究:实验验证机器人在墙面上的吸附性能,机器人的稳定性、机动性等因素,并根据实验结果优化机器人结构。
3.控制系统设计:采用控制系统设计方法,实现机器人的远程控制、安全保护等功能,保证机器人能够在安全、稳定的状态下完成清洁作业。
爬壁清洗机器人设计

爬壁清洗机器人会的不断发展,科学技术的迅猛发展,人类社会的不断进步,现代都市的摩 天大楼越建越多,越建越高,而城市的灰尘污染也越发严重,在这样的背景下,人类需 要依靠升降机平台来逐层地清洗大楼壁面,不但浪费时间和劳动力,而且人类在清洗大 楼壁面的环境越来越恶劣和危险,本课题来自于社会实际的需求,采用爬壁机器人进行 擦洗,降低清洗工人的劳动强度,提高工作效率,特别是提高安全性。如今,在科学技 术领先的国家已经采取了爬壁清洗机器人作为他们的首选工具,用来对大楼外表面进行 清理。
2 爬壁清洗机器人总体结构设计 ---------------------------------- 10
2.1 爬壁清洗机器人的材料选择 ----------------------------------------- 10 2.2 机器人总体结构介绍 ----------------------------------------------- 10 2.3 移动铝板的设计与校核 --------------------------------------------- 11 2.4 吸盘直径的选取 --------------------------------------------------- 13 2.5 电动机的选取 ----------------------------------------------------- 15 2.6 联轴器的选取 ----------------------------------------------------- 18 2.7 轴承的校核 ------------------------------------------------------- 18 2.8 滚动轴承寿命的计算 ----------------------------------------------- 19 2.9 轴的计算 --------------------------------------------------------- 20 2.10 键连接的强度计算 ------------------------------------------------ 21 2.11 轴向气缸的设计与计算 -------------------------------------------- 22 2.12 活塞杆稳定性及挠度验算 ------------------------------------------ 25 2.13 本章小结 -------------------------------------------------------- 28
基于Pro/E的清洁机器人爬壁机构设计

基于Pro/E的清洁机器人爬壁机构设计在国内外已有研究基础上,本文基于Pro/E软件设计清洗玻璃幕墙等壁面的爬壁机器人,对其爬壁构造进行分析研究。
本文所设计的机器人为四轮小车型爬壁机器人,应用传统机械传动机构的开闭合来实现吸排气的控制。
其驱动方式为后轮驱动,吸附方式采用地面连接真空泵,通过真空吸盘吸附,使吸附力更稳定且易于控制。
最终所设计的机器人在水平面与垂直面乃至任意角度的玻璃壁面均能自由行走。
标签:真空吸附;清洁机器人;Pro/E0 引言近年來,我国的城市面容发生了巨大的改变。
相比于以前,高楼大厦多了很多,大部分的高楼为了美观和成本,墙壁都是玻璃幕墙,提高了外观,但也面临着各种问题。
其中高空玻璃幕墙的清洁是一个非常典型的难题,目前清洁玻璃幕墙的方式大多是人工进行,采用悬吊装置上下升降,保洁人员亲自在高空进行作业,这种劳动效率低下,安全性没有保障,不符合当前社会发展观[1]。
于是爬壁清洁机器人应运而生,在某些危险、繁重、枯燥的岗位使用机器人代替人工劳动的行为,已逐渐发展成当代社会的一种趋势。
爬壁机器人的设计,必须具备两种功能:在任意角度的无磁甚至凹凸不平的壁面上的吸附功能和移动功能。
以此为要求,这些年来研究人员研发了多种爬壁机器人的方案,但大多有瑕疵和不稳定性,不能成功的投入工作。
例如磁力吸盘爬壁机器人,只能局限于吸附在金属的壁面上,而目前需要工作的大多是玻璃面,局限性太高;又例如大型悬挂式清洁机器人,占地面积过大、清洗复杂成本高,工作时需要特定的轨道[2]。
1 爬壁机器人的方案设计本文设计的机器人为真空吸盘式爬壁清洁机器人,因为要在垂直的壁面上行走,所以四轮小车相对于其它小车更具有稳定性。
该四轮小车(约为500mm×100mm×400mm),每个车轮都分两排,每排12个,共装有24个真空吸盘,通过地面上的真空泵提供压力进行吸附工作。
故本机器人不需要楼梯悬挂系统,直接通过机械传动机构吸排气进行控制。
真空吸附型爬壁机器人多路压力检测系统设计

2 Ja g in utyp l eh i cf g , a e a g30 9 C ia . inx d s oy c nc o eeN h 3 05, hn ) i r t l n n
Ab ta t sr c :Ai d t h r su e mo i r g o alci i g r b t w t e e a s c e s a meh d o l — me o te p e s r nt i f w l l on — mb n o o i s v rl u k r , to f mu t h i p p l e r su e mo i r g wi sn l e s r r s u e u py d vc i s v rl i eie , c e s a i ei s p e s r n t i t i ge n o .A p e s r s p l e ie w t e ea pp l s a c s t n on h s h n dfee tt s w s d sg e .O h a i o t w r i g p n il f t e mo i rn y tm s p e e td y e i r n i a e in d n te b ss f i, o k n r cp e o h n ti g s se i r s n e .T p f me i o s lc in a d rq e to tra d s n o r e c b d E p r n a e f ain w s gv n, n h e ie S ee t n e u s fmo o n e s rwee d s r e . x e me tl v r c t a ie a d t e d vc ’ o i i i i o
De " fp e r n t rn y t m , l Dq i n o r s u e m o io i g s se Wlh m u t- i ei e o s ̄ O P g I s m i l t lip p l sf r n wa lci b n o o fv c u d o p i n t p l・lm i g r b to a u m a s r to y e
爬壁机器人真空吸附及运动方式探讨

图 3 SRF 吸盘模型[8]
常好的效果。排布方式的确定是针对昆虫足式多吸盘 吸附而言, 目前多采用吸盘组的设计方法[12、18]。
此外, 多吸盘吸附要实现吸盘个体频繁的吸附与 剥离, 因此要求每个吸盘要有快速产生负压和消除负 压的能力, 这也是多吸盘设计中的关键内容。 2.2 多吸盘的承载能力和越障能力
变结构履带式爬壁机器人[22], 可以灵活而大幅度地 改变履带的形状, 从而能够在曲率半径较小的曲面上 稳定行走, 以及在具有较大交角范围的相交壁面之间 过渡。
5 结语
爬壁机器人的研制和新的设计方案层出不穷。但在 目前,爬壁机器人面临着几个技术难点, 其中涉及吸盘的 有— ——面对复杂的壁面环境, 要求吸附机构必须要产生 并维持一定的吸附力, 使机器人安全可靠地吸附在工作 壁面上, 要求出现更好的吸附及密封技术。从有关资料 看出, 现有的以真空吸盘为吸附手段的爬壁机器人对于 较为复杂的工作面适应性较差, 这是因为建筑物外墙结 构形状复杂,材料多样,壁面有沟缝、凸起物和凹陷区等, 所 以 需 要 解 决 密 封 、跨 越 、移 动 等 许 多 技 术 难 度 大 的 问 题。这极大的影响了爬壁机器人的工作效率。这些难题 是阻碍爬壁机器人向实用化方向发展的瓶颈, 也是爬壁 机器人的发展方向。为提高吸盘的吸附能力和吸附可靠 性, 研究和发现新的材料也为一些研究人员所关注, 有 些研究者提出了采用生物材料的观点, 但这一观点还停 留在理论阶段, 并未进入实用阶段, 新材料的发现也必 然会使吸盘技术变得更加成熟。
2 多吸盘吸附
采用多吸盘吸附的爬壁机器人, 通常采用昆虫足 式 爬 行 机 构 , 每 只 脚 装 一 个 或 多 个 吸 盘 , [3、25、12、15] 如 图 2 所示, 或者采用仿坦克的履带式爬行机构, 每条履带上 装若干个真空吸盘, 利用吸盘与墙面的静摩擦力和负 压使机器人紧贴墙面爬行 。 [11、13、24] 也有的将多个单吸盘 吸附系统( 一个单吸盘和两个轮子的组合) 组合, 形成 多吸盘吸附[5]。相对单吸盘吸附而言,多吸盘吸附稳定可 靠,抗倾覆承载能力和越障能力较高, 但其移动是间断 的( 昆虫足式) ,控制比较复杂,移动速度较慢。
双动力臂爬壁机器人运动吸附控制系统设计

高校 理科 研 究
双动力臂爬 壁相 器人 运动吸 咐控制系统 设计
安 徽 国防科 技 职业 学院机 电工程 系 常 迎梅
[ 摘
侯 国栋
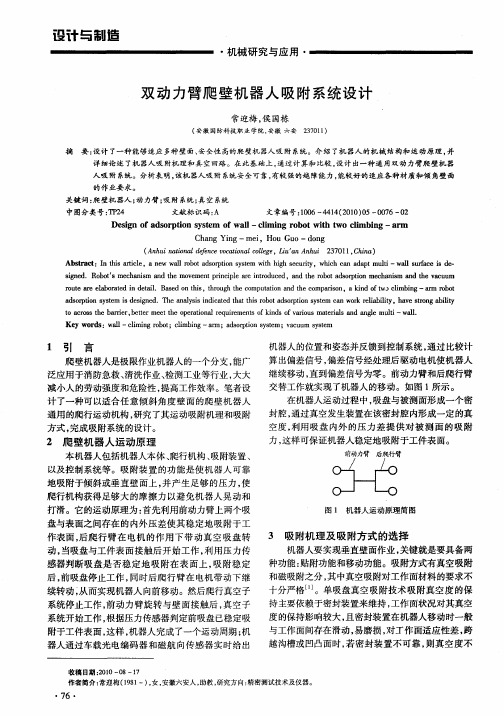
要 ] 文 设 计 了一 种 能 够 适 应 多种 壁 面 、 全 性 高的 爬 壁 机 器人 运 动 吸 附控 制 系 统 。 首 先 介 绍 了机 器人 的 结 构 和运 动 原理 , 本 安 并
详 细 描 述 了机 器人 吸 附机 理 和 真 空 回路 控 制 原 理 。在 此 基 础 上 , 计 出一 种 通 用双 动 力臂 爬 壁 机 器人 运 动 吸 附 控 制 系统 。 分 析 表 设
明, 该控制 系统工作性能 良好 。 该机 器人 吸附 系统安全可靠 , 使 有较强的越 障能 力, 能较好地适应各 种材质 和倾 角壁 面的作业要 求。 [ 关键词 ] 爬壁机 器人 运 动吸附控制 系统 真空 系统
进 电机 的 相 电 流决 定 , 4B G 0 2 Y 2 2型永 磁 感 应 子 式 步 进 电 机 的 相 电 流 为 04 .A,所 以这 里 选 用
和它配套 的驱动器 B 一 H 0 M, Y 2 B 2 它最 大驱动 电流为 2 完全 能够满足 A, 电机 的需求 。 在 选 定 了步 进 电机 和 与 它 配 套 的 驱 动 器 之 后 ,就 可 以确 定 它 的 运 行方式 。 了保证系统 的平稳运行 , 以使步进 电机工作在两相 四拍方 为 所 式 , 过 单 片 机 对 驱 动 器 的控 制 达 到 对 步 进 电机 的控 制 。 通 4爬 壁 机 器 人 真 空 回路 的 控 制 方 案 . 爬壁机 器人是依 靠真空 回路 将吸盘 中的空气带走而 形成真 空 , 依 靠大气压力将 吸盘压 紧在斜 面上 , 而使机器人能够 吸附在倾斜面上 。 从 真空 回路是爬壁机器人能够在斜面这个特殊 的工作场所工作 的关键 。 为 了提高爬壁机器人 的安全性 , 必须提高真空 回路控 制性能 , 这可 以通 过 两 个 途 径 来 实 现 : () 1优化设计 , 提高真空 系统 的设计裕量 ; ( ) 用性 能较高 的元器件 和管 路 , 2采 从硬件 上提高 系统的性 能 , 使 真空度能够较好地维持 。 在本文 中, 真空 回路 主要控制真空泵 以及 电磁控制 阀的工作 。 要求 真空泵一直处于工作状态 ,而电磁控制阀要根据控制信 号使 相应 回路
真空吸附式壁面清洗机器人毕业设计

真空吸附式壁面清洗机器人毕业设计一、选题背景壁面清洗是高空作业中最为复杂的一种工作。
因为壁面清洗带有许多难点和风险,高空作业人员在进行此类工作时往往会面临很大的压力和困难,如:上下攀爬、吸取粉尘、喷洒清洁剂,操作性高、安全性与困难性都非常的大,严重影响了高空作业效率和人员的安全。
因此,设计一款能够自动清洗壁面的机器人,将会是一项非常有实用价值的研发。
二、设计内容本文旨在设计一款真空吸附式壁面清洗机器人,该机器人能够自动清洗高空建筑物的墙面,从而降低作业人员面临的危险风险和提高壁面清洗的效率。
设计的主体部分为真空吸附底座和机器人操作系统,底座安装有大功率的吸尘器和吸附嘴,用于完成吸附墙面上的灰尘和杂物,同时吸附嘴可实现高角度吸附,满足作业需求。
在机器人操作系统内,采用微电脑控制技术,运用机械臂实现高空作业人员操作的移植,通过传动装置实现清洗工具的运作。
机器人操作系统还具有自主避障和安全保护机制,当机器人探测到危险情况时,自动停止运行,从而保护机器人的运行安全。
三、设计流程1. 设计机器人的基础框架结构,确定机器人的底座采用真空吸附技术,用于清洗墙上的灰尘和杂物,同时实现高角度吸附。
2. 确定机器人操作系统的控制器、传动和运动控制模块,采用工业控制器,并运用微型计算机编译控制程序,完成机器人的自主控制。
3. 设计机器人上的机械臂结构,实现高空作业人员操作的移植,通过传动装置实现清洗工具的运作。
4. 设计机器人的自主避障和安全保护机制,通过红外线感测器、压力感应器、超声波感测器等多种技术,实现机器人的自主避障,提高机器人的安全性能。
5. 对机器人进行试运行,检查其吸附效率、移动和操作性等基本性能和安全性能,及时发现和解决可能存在的问题和缺陷。
四、设计成果设计出的真空吸附式壁面清洗机器人,能够实现高空建筑物的墙面清洗,从而能够帮助工人避免高空作业中的困难和风险。
该机器人具有自主控制、自主避障、安全保护等功能,操作简单、安全可靠,能够在高空作业中显示出良好的性能。
真空吸附式壁面清洗机器人毕业设计

摘要机器人的开发和应用,拓展了人类的生产能力,解放了危险环境下的工作人员,极大地推动了人类科技革命和社会进步,多足式爬壁机器人属于极限作业机器人的一种,广泛应用于清洗,消防,检测等多个行业。
本文在国内外现有壁面移动机器人研究成果的基础上。
结合壁面作业的特点对壁面机器人的吸附技术,行走技术进行了研究分析,并创造性的提出了壁面越障技术,本文主要的研究工作如下:首先,追溯国内外壁面机器人研究的历史背景、总体类别与特点,及其发展态势,总结出壁面攀爬机器人的研究特点和关键技术所在。
其次,本文根据机器人实际工作的要求,主要对高空清洁卫士机器人越障系统中的腿部机构、吸附结构,驱动机构构型设计。
最后,本文在结构件的设计过程中,同时考虑轻量化和安全可靠性要求,对机器人的吸附、越障机构进行了强度校核和优化设计。
壁面越障;腿式结构;真空吸盘;机构设计;周期性步态AbstractThe development and application of robots have expanded our production capacity of the human beings, as well as emancipated personnel works in hazardous environments , greatly promoted scientific and technological revolution and human social progress.A multi legged wall climbing robot which belongs to the limit of the robot, is widely used in cleaning, fire protection, detection and other industries.Based on the existing domestic and foreign mobile robot wall surface on the research results of. According to the characteristics of the wall operation adsorption technology to wall robot, walking technology is studied and analyzed, and creatively put forward the wall climbing technique, the main research work of this article are as follows:Firstly, the historical background, the overall classification and characteristics of domestic research on outer surface of the developing situation and the robot traces, and later, summed up the research characteristic and the key technology of wall climbing robot.Secondly, in the end of this paper the robot concept design, this paper introduces Unigraphics NX model and modeling method, and taking the leg mechanism as an example, introduces the Unigraphics platform of NX parts and assembly design, and simulation results under the Simulation simulation platform.Again, this paper clearly on the wall robot based on the constraint conditions and the basic function, carries on the analysis and the design of wall climbing robot gait, elaborate periodic gait and its realization ways, fully demonstrated the periodic gait and the principle of robot.Finally, based on the design process of structural parts, considering the requirements of lightweight and safe reliability, adsorption, obstacle crossing mechanism of the robot is carried on strength and optimization design.Xxxx;xxx;目录第一章绪论…………………………………………………× 1.1 课题研究背景、目的、及其意义………………………× 1.2 国内外壁面机器人研究现状……………………………× 1.2.1国外研究现状………………………………………× 1.2.1国外研究现状………………………………………× 1.3 现有爬壁机器人类型比较分析…………………………×第二章新型越障式-高空清洁卫士总体结构设计………× 2.1新型越障式-高空清洁卫士的设计准则与要求…………× 2.2新型越障式-高空清洁卫士行走机构设计………………× 2.3新型越障式-高空清洁卫士越障系统设计………………× 2.3.1新型越障式-高空清洁卫士腿部结构的设计……× 2.3.2新型越障式-高空清洁卫士吸附结构的设计……× 2.3.3新型越障式-高空清洁卫士硬件驱动的选择……× 2.4新型越障式-高空清洁卫士总体结构设计第三章基于Unigraphics NX的三维建模技术……………× 3.1 引言………………………………………………………× 3.2 Unigraphics NX简介……………………………………× 3.3 Unigraphics NX建模方法……………………………× 3.3.1自底而上……………………………………………× 3.3.2自顶而下……………………………………………× 3.3.3两种建模方式的比较………………………………×3.4 新型越障式-高空清洁卫士建模实例………………×3.4.1腿部机构的建模……………………………………× 3.4.2主要部件的装配……………………………………×第四章机器人关键部分校核与有限元分析……………× 4.1 新型越障式-高空清洁卫士附着技术选择………………× 4.2 真空吸附机构受力与安全性分析………………………× 4.2.1抗滑落条件…………………………………………× 4.2.2抗倾覆条件…………………………………………× 4.3 腿部连杆的校核及有限元分析…………………………× 4.3.1腿部连杆的强度校核………………………………× 4.3.2腿部连杆有限元分析和结构优化…………………×结论…………………………………………………………………×致谢……………………………………………………………×参考文献………………………………………………………×附录……………………………………………………………×第一章绪论1.1课题研究背景、目的及其意义机器人是近代电子技术与传统的机构学相结合的产物,是集计算机科学、控制论、机构学、信息科学和传感技术等多学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度较高的自动化设备。
爬壁式机器人设计说明书
爬壁式机器人设计说明书1 前言1.1 立项背景2010年3月29号,吉林省长春市一大型商品集散地昨晚20时发生火灾。
经过十几个小时的紧张救援,长春市天元商厦火情得到控制。
在此期间,长春、吉林两市出动消防车超过60辆,消防官兵200多人,全力扑救。
但由于该大厦是木制框架结构,存放的又多为家居易燃品,加上楼外广告牌遮挡等问题,使得灭火工作一度进展困难。
长春市消防支队张璐文:这儿有一些广告牌子,组织了喷水,如果没有广告牌,火早就控制住了!!2007年12日8时20分许,温州市鹿城区人民路温富大厦的裙楼一楼“朵朵鲜”花店突发火灾。
由花店包花纸和塑料花的燃烧导致大量的浓烟涌入二楼的舞厅。
当时舞厅内有200人左右,大部分逃生,但有19人因一氧化碳中毒窒息死亡。
花店里共有9人,7人逃生,2人烧死。
过火面积1270平方米!!据有关部门统计,2009年上半年,全国共发生火灾7.4万起,死亡655人,受伤297人,直接财产损失6.6亿元!!不仅我国,在世界上消防工作也是一个大难题,各国政府千方百计地将火灾的顺势降到最低,然而并未取得显著性效果,面对无情的火灾,各国已将目光对准了消防机器人。
1984年11月,在日本东京的一个电缆隧道内发生了一起火灾,消防队员不得不在浓烟和高温的危险环境下在隧道内灭火。
这次火灾之后,东京消防部开始对能在恶劣条件下工作的消防机器人进行研究,目前已有五种用途的消防机器人投入使用。
[1]1.2 同类产品比较遥控消防机器人:1986年第一次使用了这种机器人。
当消防人员难于接近火灾现场或有爆炸危险时,可使用这种机器人。
这种机器人装有履带,最大行驶速度可达10公里/小时,每分钟能喷出5吨水或3吨泡沫。
喷射灭火机器人:这种机器人于1989年研制成功,属于遥控消防机器人的一种,用于在狭窄的通道和地下区域进行灭火。
机器人高45厘米,宽74厘米,长120厘米。
它由喷气式发动机或普通发动机驱动行驶。
当机器人到达火灾现场时,为了扑灭火焰,喷嘴将水流转变成高压水雾喷向火焰。
基于真空吸附式的四足垂直爬墙小型机器人研究

基于真空吸附式的四足垂直爬墙小型机器人研究摘要:为研究一种具有攀爬、简单避障、语音交互、舞蹈动作以及搭载摄像头进行观测等功能的四足爬墙机器人。
设计了一款以arduino为控制核心,采用真空吸附方式来爬墙的娱乐陪伴型机器人。
该机器人主要功能是陪伴孩子们玩耍,它具有语音交流、舞蹈动作展示的功能,以及特有的攀爬行为打破了市场上绝大多数的仅能在地面玩耍的机器人模式,更好的利用了立体空间。
3D打印的机型外壳可为其设计一系列符合儿童心理的外壳,如第一代样机就是以蜘蛛侠为参考设计的,这样的设计更符合儿童的心理需求。
通过配备的的高清摄像头能让父母实时观测孩子的一举一动,进行一个安全的监护作用。
本文主要是对这款机器人的真空吸附原理以及控制系统设计进行了一个简要的概述。
关键词:爬墙机器人;真空吸附式;控制系统设计1 四足爬行机器人总体设计1.1总体结构说明上图1-1所示是四足机器人的结构特征图,本文机器人的设计系统主要包括:(1)机体结构:建立模型,采用3D打印材料这样即减省了制造成本,而且轻便的材料使机器运行起来更灵活。
采用3D打印技术可以为适应儿童需求打造一系列的机壳外型,如第一代样机模型考虑到儿童心理以蜘蛛侠为题材构建外壳,色彩丰富以及呆萌的外型更能俘获儿童的内心,赢得家长的认同。
(2)控制系统:这是机器人的灵魂部分,也是最重要的部分。
这部分将分为六大工作模块来协同完成。
(3)感知系统:探测机器人周围环境状况,及时反馈到控制系统,从而调整机器人下一步的动态规划,增加了机器人运行中的安全性和可靠性。
1.2吸附系统设计真空吸盘吸附原理:吸盘能够吸附在垂直表面上主要原理是压强差,上图1-2是吸盘在大气压下的原理图。
工作时,吸盘里的空气被真空泵快速抽干净,使得P2<P1,就会产生相应的压力将吸盘牢牢吸附在吸附面上。
吸盘内真空度越高,吸盘吸附越牢靠。
大气作用下的压力公式为:(1)经过试验和计算,本文设计的爬墙机器人的吸盘直径为100mm。
双动力臂爬壁机器人吸附系统设计
s n d R b tsme h n s n h v me t r c pe a e ito u e ,a d t e rb ta s r t n me h im n h a u m i e . o o c a im a d t e mo e n i i l r n rd c d n o o d o i c a s a d t e v c u g p n h p o n
( n u n t nld ec ct nl oee “a nu 2 7 1 ,hn ) A h i ai a e ne oai a lg , nA h i 30 1C i o f v o cl a
Ab t a t n t i a t l sr c :I s ri e,a n w wa o o d o p in s se w t g e u t h c e l r b ta s r t y tm i h h s c r y,whc a d p l —wa u fc s d - l o hi i ih c n a a tmu t i l s ra e i e l
r ue a e ea o a e n d t .B s d o hs h o g h o u ain a d t ec mp rs n,ak n f woci i g—a T r b t o t r lb r td i em1 a e n t ,t ru h t e c mp tt n h o aio i o ido l t mb n n i o o a o t n s se i d sg e . 1 ay i id c t d t a ti o o d o p in s se C o k rl i t .h v t n b l y s p o d r i y t m e in d n e a l s n i ae t h srb t s r t y tm a w r e a l y a e sr g a i t s n s h a o n i i b o i t c o st e b r e , e trme tt e o e ain l e u r me t o id f ai u trasa d a ge mu t —w l o a rs h ar r b t e h p rt a q i i e o r e n s f n s o r s mae l n l li a1 k v o i n . Ke r s y wo d :wa l l—c mi g r b t l ig一83 ;a s r t n s se i l n o o ;ci n mb 1 1 d o i y t m;v c u s se 1 p o a u m y t m
真空吸附型爬壁机器人多路压力检测系统设计

真空吸附型爬壁机器人多路压力检测系统设计
杨志斌;毛志伟;周少玲;张华
【期刊名称】《传感器与微系统》
【年(卷),期】2010(029)004
【摘要】针对多吸盘工作的爬壁机器人吸盘内压力的监测问题,提出了一种由单一传感器监测多路管道压力的方法.设计了可多管道接入的分时压力供给装置,在此基础上给出了这种监测系统的工作原理.说明了该系统中电机和传感器的选型与相关要求,给出了相关的实验验证,从压力检测的一致性和检测压力的响应速度2个方面说明了设计的可行性,并分析了该系统扩展到其他需要多管道压力监测场合的可行性.
【总页数】3页(P78-80)
【作者】杨志斌;毛志伟;周少玲;张华
【作者单位】南昌大学机电学院服务机器人实验室,江西,南昌,330031;南昌大学机电学院服务机器人实验室,江西,南昌,330031;江西工业职业技术学院,江西,南昌,330095;南昌大学机电学院服务机器人实验室,江西,南昌,330031
【正文语种】中文
【中图分类】TP212
【相关文献】
1.一种爬壁机器人无源真空吸附和行走装置的研制 [J], 朱志强;熊艳红
2.一种爬壁机器人真空吸附性能分析与运动切换策略 [J], 吕鑫;王从庆
3.爬壁机器人真空吸附及运动方式探讨 [J], 张国平;杨杰;高婧宇
4.真空吸附式爬壁机器人设计 [J], 何雪明;丁毅;朱明波
5.霍尔器件在多路压力检测系统中的应用 [J], 马少华;刘寒冰;漆东勇
因版权原因,仅展示原文概要,查看原文内容请购买。
真空吸盘式独立行走爬壁机器人的设计
摘要摘要近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗爬壁机器人。
本文在简单介绍爬壁机器人的国内外研究现状的基础上,基于三维软件PROE 对四轮式真空吸附爬壁机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。
本文设计的爬壁机器人采用四轮式小车形状结构,结构简单;采用真空吸盘吸附方式,设计一个月牙形的真空舱,利用机械结构完成机器人真空吸盘的吸附与排气控制,避免在每个真空吸盘配备传感器的需要,降低了控制难度;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用蜗轮蜗杆传动装置作为减速器;采用地面供电,地面提供负压的方式;机器人可以在水平面或者垂直表面直线行走。
关键词:真空吸附蜗轮蜗杆机构电机驱动四轮式小车ii AbstractAbstractIn recent years, with the development of society, more and more floors, with glass curtain wall building more and more to avoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning.This paper briefly wall-climbing robot based on the research status, based on three-dimensional software, PROE, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation.This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure; by vacuum suction adsorption, design of a crescent-shaped vacuum chamber, the completion of the mechanical structure of robot vacuum suction of the adsorption and emission control, to avoid each a vacuum suction cups equipped with sensors need to reduce the difficulty of control; with rear-wheel drive, a motor drive two rear wheels, rear wheel drive front wheel complete the robot walk, use a worm gear reducer; use of ground power the ground to provide negative pressure means; robot can walk straight horizontal or vertical surface.Keywords:目录i目录第一章绪论 (4)1.1 本课题的研究背景 (4)1.2 国内外爬壁机器人的研究现状 (5)1.3 国内外爬壁机器人的发展趋势 (6)1.4壁面自动清洗机器人的研究现状与发展方向 (7)1.5设计内容 (8)第二章软件介绍 (9)第三章爬壁机器人的设计方案 (13)3.1爬壁机器人的工作过程 (13)3.2爬壁机器人的基本功能 (13)3.3爬壁机器人的设计 (14)3.3.1爬壁机器人的总体结构 (15)3.3.2移动装置和吸附装置的设计 (15)3.3.3减速装置及传动装置的设计 (19)3.3.4联轴器和轴承选择 (24)3.3.5爬壁机器人机体建模 (24)3.4爬壁机器人PROE运动仿真 (25)第四章结论 (27)参考文献...........................................错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ξ№.4 西北轻工业学院学报 D ec.1997・18・ JOU RNAL O F NOR THW EST I N ST ITU T E O F L IGH T I NDU STR Y V o l .15真空吸附式爬壁机器人设计何雪明1 丁毅 朱明波2(机械工程系)摘 要 运用壁虎爬行原理,设计构思了真空吸附式爬壁机器人.采用多组橡胶吸盘将机器人吸附在墙面上,配以简单四杆机构完成其行走功能,从而达到擦洗整个墙面的目的.该机器人可用于建筑行业和洁净业.关键词:壁面机器人,真空吸附,蠕行运动中图法分类号:TQ 242.1(TH 122)1 引言目前,瓷砖、玻璃装璜的墙壁均采用人工直接擦洗.因高空擦洗作业具有很大的危险性,因此,研制一种适用于高楼墙壁擦洗的墙壁机器人有着重要的意义.壁面机器人是集机构学、传感技术、控制和信息技术等科学为一体的高技术产品,自80年代以来在国内外取得了迅速的发展,有的已开始进入实用试验阶段.到1992年底,国外已有不同类型的爬壁机器人研制成功,其中以日本发展最快.国内较早的是哈尔滨工业大学,他们已研制成功壁面爬行遥控检测机器人,采用真空吸附式,通过运载小车使机器人在壁面上下左右自由行走.另外,上海大学研制了用于高层建筑窗户擦洗的真空吸附足式爬行机器图1 爬壁机器人总体框架图人.上海交通大学亦于1995年研制了磁吸附爬壁机器人用于油罐检测.2 真空吸附式爬壁机器人总体设计要实现机器人在普通壁面上的自由移动,必须具备粘着功能与移动功能.常见粘着功能主要靠吸附即负压吸附实现.根据吸附力量产生装置不同,又可分为真空泵式、喷射器式.移动方式一般有轮式、履带式及足式三种.针对壁面移动机器人的工作条件以及壁面非金属性、金属性等其它原因,经过比较选择了多子真空吸附、足式移动的方案.其吸附性好,结构简单,由于吸盘采用列吸盘组,Ξ收稿日期:1997-05-10 第一作者:男,32岁,硕士1、2作者单位:无锡江南大学机电系,邮编:214063图2 爬壁机器人结构简图有效吸附面积大,吸附力大,对壁面的不平度、弯曲度、空隙都有较强的适应能力.该机器人的总体框架如图1所示,其结构简图如图2所示,其动作过程如图3所示.1.1 爬壁机器人的原理爬壁机器人是依据自然界中的生物——壁虎的爬行原理设计的.我们对其进行了一定的研究和归纳,得出了基于模拟方式的爬壁机器人方案.爬壁机器人的原理及运动过程:利用其脚(吸盘)与接触物之间存在的内外压差使其能吸附在接触物的表面.当脚与接触物接触时,上下脚吸附.若机器人向上行动,则下脚吸附,上脚(吸盘)与大气相通,使其脱开壁面,同时躯体向上伸出,至上脚不能伸出为止.接着上脚开始吸住墙壁,使其能基本独立承受其重力.接下来,下脚与大气相通,再由躯体动力图3 爬壁机器人运动示意图系统使下肢向下运动,至运动原状,并吸住墙壁.循环往复完成向前行进的爬行过程.1.2 爬壁机器人的运动分析根据目前设计的爬壁机器人的爬行方式,我们定义为“蠕行式”意即模仿蠕虫行进的方式.蠕虫行进方式见图4.爬壁机器人行进方式见图5(忽略足部细节运动).比较上述两种行进方式我们可以认为它们是相类似的,并可得出如下的等价关系:蠕虫的头尾=爬壁机器人的前后脚,蠕虫的身躯=爬壁机器人的导轨伸缩机构.当然,本文设计的机图4 蠕虫行进方式器人其行进功能和蠕虫有一定的区别.首先,蠕虫的行进方式和着落点具有选择性,而本文的爬壁机器人仅限于直线行走和限定行程的着落.其次,蠕虫的行进具有避让性——即对墙面具有很强的适应能力,它可・91・第4期 何雪明等:真空吸附式爬壁机器人设计图5 爬壁机器人行进方式通过身躯的弯曲程度来避让并适应不同曲率的墙面,与灵活的着落点相配合而具有更佳的适应性.本文设计的机器人的行进是刚性导轨式的,不具备柔性,适应性有一定的限度,而且吸盘亦不允许墙面具有较大的不规则性和不平滑度,仅限于能跨过条形阻挡条的有限高度(0~10c m ).当然,此机器人仅是初步设计,通过采用其它类型的机构和更小更密的吸盘陈列是能提高爬壁机器人的壁面适应性和越障碍能力的.2 吸附式机器人的结构设计2.1 移动吸附机构设计图6 受力分析吸附材料采用软橡胶.机器人的工作状况与吸盘的吸力大小有关,如图6所示为机器人静止吸附在壁面时的受力情况.机器人能维持吸附的条件为F =nF P 1≥W (设P 1′=P 2′)P 1≥Wnf (1) 式中:F 为摩擦力,f 为摩擦系数,P 1为单个吸盘的吸力,W 为机器人自重与其附件重量之和,n 为吸盘的个数.由于机器人重心离壁面距离为h ,与F 形成的力矩将影响到重心上半部分对壁面的有效压力,同时,考虑到由于地面有缝隙而减少真正吸附壁面的吸盘个数,引入安全系数K 1,则单个吸盘的吸附力为:P =K 1P 1K 1值的大小取决于壁面灰尘、空隙、不平度以及行走中遇到障碍物如电线、导气管等因素,一般取2~3.2.2 吸盘机构如图7所示为单个吸盘的结构图,它是由钢球1、橡皮圈2、弹簧3和4所组成.在忽略气体摩擦和位置时,由伯努利方程得:V 22+KK -1P Θ=C 即 V 22=C -KK -1PΘ 式中:V 为气体的速度,K 为气压压缩系数,P 为压力,Θ为密度,C 为常数.当导管中的气压还在减小,同时有几个吸盘已经处于有效吸附的情况下,在缝隙上的吸盘与大气相通,因此V 值将增大,这样小球就受到气体的压力,随即密封通气口,达到工作效果.・02・西北轻工业学院学报 第15卷图7 吸盘结构F 气=ΘQ ∃V g F 弹=K ∃x F 气≥F 弹 式中:Θ为气体密度,Q 为流量,∃V 为气体流速的改变量,g 为重力加速度,K 为弹簧屈强系数,∃x 为压缩位移.则K ≤ΘQ ∃V g ∃x2.3 脚部机构脚部机构如图8所示由1—吸盘陈列,2、3、7—微型开关,4—弹簧,5—平行四边形连杆器,6—曲柄连杆等组成.脚部由两连杆机构串联而成,在保证吸盘陈列与壁面平行的同时,又有向前移动及翻越动作.鉴于连杆机构是刚性构件,分别在吸盘陈列与脚部之间连有弹簧,确保其有一定的柔性,其动作的限制和定位由2、3、7三个定位开关实现.图8 脚部机构 图9 行进机构2.4 行进结构行进机构如图9所示由1—前身,2—后身,3—转向(导向轮),4—卷线、释线轮,5—动力系统(行进用),6—类同3,7、8—限位开关等组成.动作描述如下:由5带动4正向、逆向旋转来带动机体1、2产生相对移动,从而产生运动,具体的行进速度视其情况而定.3 控制部分控制部分见图10所示分上、下肢部分及足部控制三部分.足运动分析见图11.4 结论目前设计的机器人相对是很简单的,只具备直行能力,没有相应的判断功能和承担相应的功能,因此只能作为初步的载体研究.验证机器人墙壁爬行的方法以及把大吸盘细化——陈列吸盘并变成相互独立的个体,可随时增加或减少吸盘数及陈列组数.作为吸附足的一种发展方向,可以认为此种吸附足将被赋于强大的生命力而担当多种高空作业,替代人类作危险的劳动.因此,前景是十分喜人的.・12・第4期 何雪明等:真空吸附式爬壁机器人设计图10 控制原理图图11 足运动分析图参考文献1 徐殿国.日本壁面移动机器人技术发展概况.机器人,1989;3(4):53~582 Kagubode satoeds .In specti on robo t fo r tank w all in m celear p lan t .In ternati onalConference on A dvanced Robo t ,1987,177~1803 To sh i o ,Fukuda .C raw ler typ e w all su rface m ob ile suckers Japan U SA Sym po 2sium on F lex ib le A u tom ati on A S M E ,1992;(1):769~608(下转第33页)・22・西北轻工业学院学报 第15卷TECHNOLOG Y OF D ISTR IBUTED CONTROL S Y STE MIS APPL IED IN A BEER FER M ENTAT I ON PROCESSZ hu Y iz ao Y u D ay uan W u J uanABSTRACTA m easu rem en t and con tro l system based on DCS (D istribu ted Con tro l System )tech 2no logy is u sed in a beer fer m en tati on p rocess fo r con tro lling techno logical param eters of tem p eratu re ,p ressu re ,liqu id level and flow .T he system con sist of indu strial con tro l com 2p u ter ,m easu rem en t un it and con tro l un it .R unn ing resu lts show s that the system are sta 2b ly and reliab le ,and can con tro l beer fer m en tati on p rocess accu rately ,and i m p rove the quality of the beer .Keyword :beer fer m en tati on ,distribu ted m easu rem en t and con tro l ,m easu rem en t un it ,fuzzy con tro l(上接第22页)D ESIGN OF ABS ORPT I ON -T Y PE CL I M B ING -W ALLROB OT OF VACUU MH e X ue m ing D in Y i Z hu M ing boABSTRACTIn th is article ,w ith the aid of p rinci p le of gecko cli m b ing ,au tho r designed and w o rked ou t the ab so rp ti on -typ e cli m b ing -w all robo t of vacuum .Robo t is ab so rp ted on the w all by adop ting several group s rubber suckers ,and is m ated si m p ly fou r -lever m echan is m to fin ish its m oving .So that the goal of clean ing the w ho le w all is reached .T h is robo t lies in the leading p lace am ong the sam e k inds of robo ts in ou r coun try .If is can be i m p roved fu rther ,it w ill get s w ift developm en t and sp read in the bu ilding and clean ing field ,app lied p ro spect is better .Keywords :cli m b ing -w all robo t ,ab so rp ti on of vacuum ,w riggle m ovem en t ・33・第4期 祝一藻等:集散测控技术在啤酒发酵工艺过程中的应用。