VxWorks 基本概念
嵌入式实时操作系统VxWorks入门

嵌入式实时操作系统VxWorks入门VxWorksVxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的 F-16、FA-18 战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
VxWorks原先对中国区禁止销售,自解禁以来,在我们的军事、通信、工业控制等领域得到了非常广泛的应用。
VxWorks的实时性体现在能于限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
因此,实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
本文将对这个操作系统进行一个入门级的、全面的介绍。
为力求展示其全貌,全文共分五章:(1)搭建VxWorks嵌入式开发环境;(2)简要介绍VxWorks的基本组成,内核的基本结构;(3)概述VxWorks板级支持包(BSP)的概念及VxWorks的启动过程;(4)介绍VxWorks设备驱动的架构及编写方法;(5)指明VxWorks应用开发的思路,任务调度及任务同步、中断与任务的同步机制。
以上各章中将贯穿着许多实例,由于本文定位于入门级教程,所以文中的实例都将十分简单。
下面我们进入第一章内容的讲解。
嵌入式系统的调试调试方法一般为通过PC(宿主机)上的集成开发环境交叉编译针对特定电路板(目标机)的程序,然后将程序通过目标板的JTAG、串口或网口等途径下载到目标板上运行。
因此,为了构造一个嵌入式系统的学习环境,拥有一块包含CPU、存储器及I/O 电路(构造计算机系统)的目标电路板往往是必要的。
虽然许多集成开发环境附带模拟软件,但仅限于指令集的模拟,均无法模拟物理的目标机硬件平台,因而在其上只能进行应用程序的象征性模拟开发。
VxWork介绍及编程
VxWork介绍及编程一.嵌入式操作系统VxWorks简介VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的 F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
WindRiver公司网址实时操作系统和分时操作系统的区别从操作系统能否满足实时性要求来区分,可把操作系统分成分时操作系统和实时操作系统。
分时操作系统按照相等的时间片调度进程轮流运行,分时操作系统由调度程序自动计算进程的优先级,而不是由用户控制进程的优先级。
这样的系统无法实时响应外部异步事件。
实时操作系统能够在限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
分时系统主要应用于科学计算和一般实时性要求不高的场合。
实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
VxWorks的特点∙可靠性操作系统的用户希望在一个工作稳定,可以信赖的环境中工作,所以操作系统的可靠性是用户首先要考虑的问题。
而稳定、可靠一直是VxWorks的一个突出优点。
自从对中国的销售解禁以来,VxWorks以其良好的可靠性在中国赢得了越来越多的用户。
∙实时性实时性是指能够在限定时间内执行完规定的功能并对外部的异步事件作出响应的能力。
实时性的强弱是以完成规定功能和作出响应时间的长短来衡量的。
VxWorks 的实时性做得非常好,其系统本身的开销很小,进程调度、进程间通信、中断处理等系统公用程序精练而有效,它们造成的延迟很短。
VxWorks操作系统基础(适合初学者阅读)2024新版

系统库(System Library)
提供一系列操作系统服务,如文件操作、网络协议栈等。
驱动程序(Device Drivers)
与硬件设备交互,实现对硬件设备的控制和管理。
内核组成及作用
内核组成及作用
01
内核的主要作用包括
02 管理系统资源,如CPU、内存、I/O设备等 。
06
VxWorks文件系统操作指南
文件系统类型及特点介绍
RAM-based File System
基于RAM的文件系统,读写速度快,但数据在 关机后丢失。
TrueFFS
Wind River特有的闪存文件系统,提供磨损均 衡和掉电保护功能。
ABCD
DOS File System (dosFs)
兼容MS-DOS的文件系统,支持FAT12、FAT16 和FAT32格式。
01
VxWorks操作系统概述
VxWorks操作系统定义
VxWorks是一款由美国风河公司( Wind River)开发的嵌入式实时操 作系统(RTOS),专为需要实时响 应和高可靠性的应用而设计。
VxWorks提供了丰富的中间件和开发 工具,支持多种处理器架构和硬件平 台,广泛应用于航空、航天、通信、 医疗、工业自动化等领域。
在ISR中处理完中断事件后, 需要及时清除中断标志,避 免重复处理。
中断优先级设置和嵌套处理
01
VxWorks支持多级中断优先级,高优先级的中断可以打断低优先 级的中断处理。
02
中断优先级可以通过配置文件或动态调整进行设置,以满 足不同应用场景的需求。
03
在处理中断时,如果发生更高优先级的中断请求, VxWorks会自动保存当前中断的上下文信息,并跳转到更 高优先级的中断处理程序中。处理完成后,再恢复之前中 断的上下文信息并继续执行。这种机制称为中断嵌套处理 。
VxWorks入门

1. 概述1.1 TORNADO 组件1.1.1 开发工具1.1.2 实时系统1.1.3 Tornado 文件目录1.2 硬件/软件配置1.3 booting介绍1.4 Tornado开始过程1.5 WDB 代理2 Projects2.1 bootable projects2.2 集成模拟器vxsim2.3 Downloadable projects 2.4 build说明3 WindSh 和Browser3.1 WindSh3.2 Browser4 CrossWind4.1 Debugging简介4.2 任务级Debugging 4.3 系统级DebuggingVxWorks 是美国Wind River System 公司(以下简称风河公司,即WRS 公司)推出的一个实时操作系统。
WRS 公司组建于1981年,是一个专门从事实时操作系统开发与生产的软件公司,该公司在实时操作系统领域被世界公认为是最具有领导作用的公司。
VxWorks 是一个运行在目标机上的高性能、可裁减的嵌入式实时操作系统。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
1984年WRS 公司推出它的第一个版本--VxWorks 1.0.1,在1999年推出了它的最新版本VxWorks 5.4。
从1995年以后,WRS 公司推出了一套实时操作系统开发环境-- Tornado。
1.1 Tornado2.0 组件Tornado是嵌入式实时领域里最新一代的开发调试环境。
Tornado给嵌入式系统开发人员提供了一个不受目标机资源限制的超级开发和调试环境。
T ornado包含三个高度集成的部分:. 运行在宿主机和目标机上的强有力的交叉开发工具和实用程序;. 运行在目标机上的高性能、可裁剪的实时操作系统VxWorks;. 连接宿主机和目标机的多种通讯方式,如:以太网,串口线,ICE或ROM仿真器等。
Vxworks几个重要概念
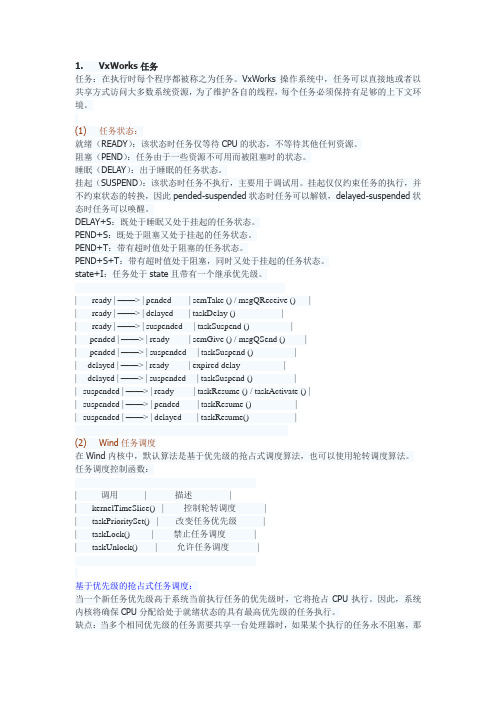
1. VxWorks 任务任务:在执行时每个程序都被称之为任务。
VxWorks操作系统中,任务可以直接地或者以共享方式访问大多数系统资源,为了维护各自的线程,每个任务必须保持有足够的上下文环境。
(1) 任务状态:就绪(READY):该状态时任务仅等待CPU的状态,不等待其他任何资源。
阻塞(PEND):任务由于一些资源不可用而被阻塞时的状态。
睡眠(DELAY):出于睡眠的任务状态。
挂起(SUSPEND):该状态时任务不执行,主要用于调试用。
挂起仅仅约束任务的执行,并不约束状态的转换,因此pended-suspended状态时任务可以解锁,delayed-suspended状态时任务可以唤醒。
DELAY+S:既处于睡眠又处于挂起的任务状态。
PEND+S:既处于阻塞又处于挂起的任务状态。
PEND+T:带有超时值处于阻塞的任务状态。
PEND+S+T:带有超时值处于阻塞,同时又处于挂起的任务状态。
state+I:任务处于state且带有一个继承优先级。
------------------------------------------------------------------------| ready | ——> | pended | semTake () / msgQReceive () || ready | ——> | delayed | taskDelay () || ready | ——> | suspended | taskSuspend () || pended | ——> | ready | semGive () / msgQSend () || pended | ——> | suspended | taskSuspend () || delayed | ——> | ready | expired delay || delayed | ——> | suspended | taskSuspend () || suspended | ——> | ready | taskResume () / taskActivate () || suspended | ——> | pended | taskResume () || suspended | ——> | delayed | taskResume() |------------------------------------------------------------------------(2) Wind任务调度在Wind内核中,默认算法是基于优先级的抢占式调度算法,也可以使用轮转调度算法。
vxworks课件

第一节 VxWorks操作系统的 VxWorks操作系统的 基本构成
3 网络系统
VxWorks支持两种形式的网络 VxWorks支持两种形式的网络 驱动,一种是BSD驱动支持通用的 驱动,一种是BSD驱动支持通用的 BSD4.4网络,API,结构等和大多数 BSD4.4网络,API,结构等和大多数 BSD网络的驱动类似.另一种是END BSD网络的驱动类似.另一种是END 网络驱动, VxWorks独有的, 网络驱动,是VxWorks独有的,根据 VxWorks MUX接口编程,不过END驱 MUX接口编程,不过END驱 动在底层也要转换成BSD的形式. 动在底层也要转换成BSD的形式.
第一节 VxWorks操作系统的 VxWorks操作系统的 第二节 开发工具tornado 开发工具tornado 基本构成
2 微内核wind 微内核wind
在VxWorks 下,任何子程序 都可产生具有自身的上下文和堆 栈的单独任务.其它的基本任务 控制程序可使任务悬挂,重开, 删除,延迟和改变优先级.
�
第一节 VxWorks操作系统的 VxWorks操作系统的 基本构成
1
板级支持包BSP 板级支持包BSP
所谓初始化是指从系统上电复位 开始直到wind kernel和usrRoot根任务 开始直到wind kernel和usrRoot根任务 启动这段时间系统的执行过程.驱动 程序就是一些包含I/O操作的子函数. 程序就是一些包含I/O操作的子函数. 初始化包括CPU Init, 初始化包括CPU Init,Board Init 和System Init.CPU Init初始化CPU的 Init. Init初始化CPU的 内部寄存器.Board Init初始化智能 内部寄存器.Board Init初始化智能 I/O的寄存器,将device打通.System I/O的寄存器,将device打通.System Init为系统的运行准备数据结构,进行 Init为系统的运行准备数据结构,进行
Vxworks基础
为各种目标板的硬件功能提供了统一的软件接口 它们包括: 硬件初始化 中断处理和产生 硬件时钟和定时器管理 内存映射和分配 BSP还包括boot Rom和其它启动机制 sysLib和sysALib库是VxWorks可移植的核心
Vxworks操作系统将一切与硬件有关的功能模块都放在BSP库中。该BSP库是硬件与软件的接口,处理硬件的初始化、中断处理与产生、硬件时钟与定时管理、局部和总线内存空间的映射、内存大小定义,等等。能够自行启动目标机、初始化目标机、能够与host通信以下载Vxworks核、把控制权交给Vxworks核来调用用户应用程序等功能。
Tornado 系统结构
POSIX Library
Real-Time Embedded Application
Host
VxSim
Debug Agent
Tornado Plug-ins
Target
Target Server
Launcher
Core OS
BSP
Ethernet
Serial Line
板支持包(BSP)
VxWorks的特点--高度伸缩性的环境
Stand-alone kernel up to full featured OS
0
100
200
300
400
500
Maximum Equipped
File System
Networking
O.S.
m
Memory Requirements (Kbytes)
VxWorks (1)
Vxworks提供了一套丰富的任务间通信机制,包括: ●内存共享(Shared memory):简单的数据共享方法 ●信号量(Semaphore):用于基本的互斥及同步 ●消息队列(Message queues)和管道(pipe): 用于同一CPU上任务间消息的传递 ●套接口(Socket)和远程程序调用(RPC): 用于网络上任务间的通信 ●信号(Signal):用于异常处理 此外,Vxworks提供了三种共享内存的对象(shared-memory objects) 来实现运行在不同CPU上的任务间的高速同步和通信。 ●共享信号量(shared semaphores):有二进制,记数型两种 ●共享消息队列(shared message queues) ●共享内存分区(shared-memory partitions):有系统类型和用户类型
第三章vxWorks操作系统基本概念(1)PPT课件

2020/8/20
11
VxWorks操作系统
Memory Management
Device Support
Scheduling & System Clock
Facilities
Synchronization & Intertask Communication
File Systems
Mutual Exclusion
✓ WindSh
交互访问
✓ CrossWind
源代码级调试器
✓ Browser
显示系统信息
✓ Project Facility 配置操作系统或应用的工程管理
✓ WindView
多任务应用软件示波器
✓ Simulator 主机端VxWorks模拟器
用Tcl自定义的工具: ✓ 增加新功能 ✓ 定制用户接口 ✓ 目标驻留工具
WTX = Wind River Tool eXchange
WDB = Wind DeBug
2020/8/20
15
Tornado和VxWorks目录描述
2020/8/20
16
Tornado和VxWorks目录描述(继续)
2020/8/20
17
Tornado
3.1 Tornado和VxWorks简介
Tornado和VxWorks描述 Tornado和VxWorks相互关系 Tornado和VxWorks目录描述
2020/8/20
4
Tornado是什么?
Tornado是开发实时嵌入式应用的集成开发环境. Tornado的主要组件: VxWorks实时操作系统运行库(RTOS) VxWorks开发工具(辅助测试和调试和计时) 网络协议栈支持
VxWorks之认识(转)
VxWorks之认识(转)Tornado是WindRiver公司开发的用于嵌入式开发的一组产品,它包括32位实时操作系统VxWorks,集成开发环境(IDE,包括编译器等)。
下面是我阅读完VxWorks相关文档后的一些个人认识。
一.VxWorks操作系统VxWorks时实时多任务的嵌入式操作系统,它主要包括任务调度、I/O功能、文件系统、中断管理、内存管理、网络功能、内存管理、BSP(系统启动模块)等。
它的多任务的实现是由中断驱动的,即在每个系统时钟中断中,实现任务的调度。
VxWorks中的任务有优先级的概念。
与其它嵌入式操作系统相比,它有如下优点:1.任务之间的切换快,任务间通信手段多样;2.中断响应的延时短;3.内存管理安全:VxWorks把内存分成很多区域,包括内核区、用户区,并且采用虚拟内存管理的方法,这样大大提高了系统的安全性,并且增加了堆栈溢出的判断;4. I/O功能丰富,硬件驱动全面;5.文件系统强大;6.网络功能全面;7.对任务的实时监控;8. BSP(启动模块)的支持;9.多CPU的支持;10.系统各模块是单独的库,可以根据需要加载。
下面就详细讲述各部分内容。
1.多任务功能:VxWorks的任务有优先级的概念,其任务调度也是基于优先级考虑的,是抢占式的,VxWorks的任务有256个等级,0—255,数目越小表示优先级越高。
高优先级的任务可以打断低优先级的任务而抢先执行,只有在高优先级的任务执行完后,低优先级的任务才可以执行。
其调度算法有两种:完全抢占式的和循环分配式的。
完全抢占式的是除了高优先级任务可以打断低优先级任务外,在相同优先级的任务之间,不可以相互打断,并且同优先级任务不是同时执行的,只有等该任务执行完后,与其相同优先级的任务才可以执行;循环分配式除了具有抢占功能之外,相同优先级的任务是可以同时执行的,即系统时间片是在它们之间平均分配的,这样,相同优先级的任务可以同时执行。
VxWorks入门

嵌入式实时操作系统VxWorks入门VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
VxWorks原先对中国区禁止销售,自解禁以来,在我们的军事、通信、工业控制等领域得到了非常广泛的应用。
嵌入式系统的调试方法一般为通过PC(宿主机)上的集成开发环境交叉编译针对特定电路板(目标机)的程序,然后将程序通过目标板的JTAG、串口或网口等途径下载到目标板上运行。
如图1。
因此,为了构造一个嵌入式系统的学习环境,拥有一块包含CPU、存储器及I/O电路(构造计算机系统)的目标电路板往往是必要的。
虽然许多集成开发环境附带模拟软件,但仅限于指令集的模拟,均无法模拟物理的目标机硬件平台,因而在其上只能进行应用程序的象征性模拟开发。
但是,并非所有人都能拥有一块物理的电路板。
在这种情况下,我们如何构造一个模拟的开发环境,其学习效果就如同拥有完全真实的电路板一样呢? 本文试图解答此问题,主体内容包括四个方面:1.利用VMware等软件模拟真实的目标机;2.构建VMware虚拟PC上VxWorks BSP,建立Bootrom和OS映像;3.修改Tornado相关设置,连接宿主机与目标机,建立调试通道;4.写一个简单的应用程序并下载到目标系统运行。
图1 嵌入式系统的调试本章工作的最终目标为:(1)VxWorks在VMware启动成功并顺利运行,如图2;图2 在VMware中运行的VxWorks(2)可在Tornado上针对目标板编译程序并进行调试,如图3。
图3 与目标机建立调试通道的Tornado1. 模拟目标机PC也具有目标机的所有特点,实际上,我们可以把PC作为嵌入式系统的目标机,从而构造如图4所示的开发模型:图4 PC作为目标机很遗憾,这种方法实际上非常麻烦,同时开动两台PC进行调试将使你和你的室友饱受折磨,既然他如此地热切于游戏和上网。
VxWorks 5.5 学习笔记

VxWorks 5.5开发指南学习笔记第一章VxWorks概述1.绪论VxWorks是一种嵌入式的实时操作系统,所谓嵌入式操作系统就是我们自己设计开发一块可以实现某种功能的板子,一般的功能板上都有一个cpu,嵌入式实施操作系统就是运行于这个cpu之上,使我们能够在板子上作相应得软件开发实现板子功能。
VxWorks支持32位的CPU,包括Intel公司的x86、Motorola公司的68k 和PowerPC、MIPS、ARM、Intel公司的i960、Hitachi公司的SH。
我们设计的这块板子通常没有软件的自开发能力,所以我们需要一台通用机来辅助开发,这台通用机可以是PC或工作站,我们称辅助我们软件开发的通用机为宿主机(Host),用户自己开发的板子为目标机(Target)。
宿主机上要有一个集成开发环境(IDE)来辅助我们的软件开发,这套集成开发环境可以运行在Windows95/NT 或 UNIX下,包括交叉编译器(Cross Compiler)和交叉调试器(Cross Debugger),所谓交叉编译器就是在宿主机上编译生成可以在目标机上运行的代码IMAGE,交叉调试器就是通过宿主机和目标机之间的某种耦合方式实现前后台调试。
我们称宿主机上的这套集成开发环境为Tornado,编译生成的目标机上的可执行代码IMAGE为VxWorks。
在系统安装的时候,集成调试环境和VxWorks的原材料(一些obj文件)都安装到宿主机上,编译生成的在目标机上运行的IMAGE内包含操作系统。
下面我们分别来介绍这两部分内容。
1.1IMAGE of VxWorks1.IMAGE的结构IMAGE可以分为三个层次四个部分,最底层是BSP,中间层是VxWorks其中包含WindKernel 和components两部分,最高层是应用实现层app。
1)BSPBSP是系统用来管理外设的部分,由两部分组成:初始化、驱动程序。
所谓初始化是指从系统上电复位开始直到wind kernel和usrRoot根任务启动的这段时间系统的执行过程。
VxWorks介绍及编程
VxWork介绍及编程一.嵌入式操作系统VxWorks简介VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的 F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
WindRiver公司网址实时操作系统和分时操作系统的区别从操作系统能否满足实时性要求来区分,可把操作系统分成分时操作系统和实时操作系统。
分时操作系统按照相等的时间片调度进程轮流运行,分时操作系统由调度程序自动计算进程的优先级,而不是由用户控制进程的优先级。
这样的系统无法实时响应外部异步事件。
实时操作系统能够在限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
分时系统主要应用于科学计算和一般实时性要求不高的场合。
实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
VxWorks的特点•可靠性操作系统的用户希望在一个工作稳定,可以信赖的环境中工作,所以操作系统的可靠性是用户首先要考虑的问题。
而稳定、可靠一直是VxWorks的一个突出优点。
自从对中国的销售解禁以来,VxWorks以其良好的可靠性在中国赢得了越来越多的用户。
•实时性实时性是指能够在限定时间内执行完规定的功能并对外部的异步事件作出响应的能力。
实时性的强弱是以完成规定功能和作出响应时间的长短来衡量的。
VxWorks 的实时性做得非常好,其系统本身的开销很小,进程调度、进程间通信、中断处理等系统公用程序精练而有效,它们造成的延迟很短。
Vxworks简介
Vxworks简介VxWorks 是美国Wind River System 公司(以下简称风河公司,即WRS 公司)推出的一个实时操作系统。
Tornado 是WRS 公司推出的一套实时操作系统开发环境,类似MicrosoftVisual C,但是提供了更丰富的调试、仿真环境和工具外文名VxWorks 开发时间1983年公司Wind River System(风河公司)产地美国产品类型实时操作系统开发环境Tornado1、简介VxWorks 操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器、2008年5月登陆的凤凰号,和2012年8月登陆的好奇号也都使用到了VxWorks上。
2、组成VxWorks操作系统有以下部件组成:内核多任务调度(采用基于优先级抢占方式,同时支持同优先级任务间的分时间片调度)任务间的同步进程间通信机制中断处理定时器和内存管理机制I/O 系统VxWorks 提供了一个快速灵活的与ANSI C 兼容的I/O 系统,包括UNIX 标准的Basic I/O (creat(),remove(),open(),close(),read(),write(),and ioctl().),Buffer I/O (fopen(),fclose(),fread(),fwrite(),getc(),putc()) 以及POSIX 标准的异步I/O。
VxWorks 包括以下驱动程序:网络驱动、管道驱动、RAM盘驱动、SCSI驱动、键盘驱动、显示驱动、磁盘驱动、并口驱动等。
嵌入式实时操作系统VxWorks

目录
• VxWorks操作系统概述 • VxWorks系统核心功能 • VxWorks开发环境与工具 • VxWorks系统设计与实践
目录
• VxWorks系统案例分析 • VxWorks与其他实时操作系统的比较
01
VxWorks操作系统概述
定义与特点
定义
VxWorks是一种高性能、可扩展的实 时操作系统(RTOS),专为嵌入式系 统设计。
资源占用
Linux通常需要更多的内存和存储资源,不太适合资源有限 的嵌入式系统。VxWorks则更为紧凑。
开放性
Linux是开源的,拥有庞大的社区支持和丰富的软件资源。 VxWorks的源代码不公开。
VxWorks与QNX的比较
实时性
VxWorks和QNX都具备出色 的实时性,能够满足严苛的 实时需求。两者在微秒级别 内都能快速进行任务调度和
内存分区管理
VxWorks将内存划分为多个分区,每个任务占用一个 独立的内存分区,避免内存冲突。
内存保护机制
通过内存保护机制,确保每个任务的代码和数据不会 互相干扰。
动态内存分配
提供动态内存分配函数,允许任务在运行时申请和释 放内存。
系统优化与性能测试
代码优化
通过优化任务代码,降 低系统开销,提高实时 性。
中断处理优化
优化中断处理程序,减 少中断延迟,提高系统 响应速度。
性能测试与评估
通过实际测试和评估, 验证系统性能是否满足 实时性要求。
05
VxWorks系统案例分析
案例一:无人机飞控系统
无人机飞控系统需要实时响应、高可 靠性和可扩展性,以满足飞行控制和 导航的需求。
VxWorks 5.5 学习笔记

VxWorks 5.5开发指南学习笔记第一章VxWorks概述1.绪论VxWorks是一种嵌入式的实时操作系统,所谓嵌入式操作系统就是我们自己设计开发一块可以实现某种功能的板子,一般的功能板上都有一个cpu,嵌入式实施操作系统就是运行于这个cpu之上,使我们能够在板子上作相应得软件开发实现板子功能。
VxWorks支持32位的CPU,包括Intel公司的x86、Motorola公司的68k 和PowerPC、MIPS、ARM、Intel公司的i960、Hitachi公司的SH。
我们设计的这块板子通常没有软件的自开发能力,所以我们需要一台通用机来辅助开发,这台通用机可以是PC或工作站,我们称辅助我们软件开发的通用机为宿主机(Host),用户自己开发的板子为目标机(Target)。
宿主机上要有一个集成开发环境(IDE)来辅助我们的软件开发,这套集成开发环境可以运行在Windows95/NT 或 UNIX下,包括交叉编译器(Cross Compiler)和交叉调试器(Cross Debugger),所谓交叉编译器就是在宿主机上编译生成可以在目标机上运行的代码IMAGE,交叉调试器就是通过宿主机和目标机之间的某种耦合方式实现前后台调试。
我们称宿主机上的这套集成开发环境为Tornado,编译生成的目标机上的可执行代码IMAGE为VxWorks。
在系统安装的时候,集成调试环境和VxWorks的原材料(一些obj文件)都安装到宿主机上,编译生成的在目标机上运行的IMAGE内包含操作系统。
下面我们分别来介绍这两部分内容。
1.1IMAGE of VxWorks1.IMAGE的结构IMAGE可以分为三个层次四个部分,最底层是BSP,中间层是VxWorks其中包含WindKernel 和components两部分,最高层是应用实现层app。
1)BSPBSP是系统用来管理外设的部分,由两部分组成:初始化、驱动程序。
所谓初始化是指从系统上电复位开始直到wind kernel和usrRoot根任务启动的这段时间系统的执行过程。
VxWorks操作系统概述
VxWorks操作系统概述(1) 无忧电子开发网VxWorks操作系统概述(1)1. VxWorks操作系统概述1.1. VxWorks 操作系统简介实时多任务操作系统是能在确定的时间内执行其功能,并对外部的异步事件作出响应的计算机系统。
多任务环境允许一个实时应用作为一系列独立任务来运行,各任务有各自的线程和系统资源。
VxWorks系统提供多处理器间和任务间高效的信号灯、消息队列、管道、网络透明的套接字。
实时系统的另一关键特性是硬件中断处理。
为了获得最快速可靠的中断响应,VxWorks系统的中断服务程序ISR有自己的上下文。
VxWorks实时操作系统由400多个相对独立的、短小精炼的目标模块组成,用户可根据需要选择适当模块来裁剪和配置系统,这有效地保证了系统的安全性和可靠性。
系统的链接器可按应用的需要自动链接一些目标模块。
这样,通过目标模块之间的按需组合,可得到许多满足功能需求的应用。
VxWorks操作系统的基本构成模块包括以下部分:·高效的实时内核WindVxWOrks实时内核(Wind)主要包括基于优先级的任务调度、任务同步和通信、中断处理、定时器和内存管理。
·兼容实时系统标准POSIXVxWOrks提供接口来支持实时系统标准P.1003.1b.·I/O系统VxWOrks提供快速灵活的与ANSI-C相兼容的I/O系统,包括UNIX的缓冲I/O和实时系统标准POSIX的异步I/O。
VxWOrks包括以下驱动:网络 --- 网络设备(以太网、共享内存)管道 --- 任务间通信RAM --- 驻留内存文件SCSI --- SCSI硬盘,磁碟,磁带键盘 --- PC x86键盘(BSP仅支持x86)显示器 --- PC x86显示器(BSP仅支持x86)磁碟 --- IDE和软盘(BSP仅支持x86)并口 --- PC格式的目标硬件·本机文件系统·I/O系统VxWorks的文件系统与MS-DOS、RT-11、RAM、SCSI等相兼容。
VxWorks简介
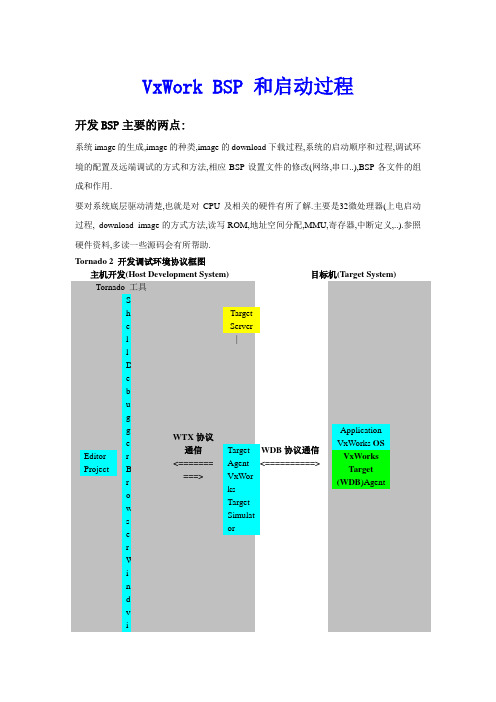
VxWork BSP 和启动过程开发BSP 主要的两点:系统image 的生成,image 的种类,image 的download 下载过程,系统的启动顺序和过程,调试环境的配置及远端调试的方式和方法,相应BSP 设置文件的修改(网络,串口..),BSP 各文件的组成和作用.要对系统底层驱动清楚,也就是对CPU 及相关的硬件有所了解.主要是32微处理器(上电启动过程, download image 的方式方法,读写ROM,地址空间分配,MMU,寄存器,中断定义,..).参照硬件资料,多读一些源码会有所帮助.Tornado 2 开发调试环境协议框图 主机开发(Host Development System) 目标机(Target System)Tornado 工具WTX 协议通信<==========> Editor Project S h e l lDebug g e r B r o w s erWindviTargetServer|Target Agent VxWor ks Target Simulat or WDB 协议通信 <==========> Application VxWorks OS VxWorks Target (WDB )Agentew两个主要两个协议WTX协议(Wind River Tool eXchange): 用于开发机内部Tornado工具与Target Server之间通信.WDB协议(Wind DeBug): 用于主机Target Server与目标机之间的通信.一.基本概念BSP定义:Provides VxWorks with primary interface to hardware environment.作用:在通电后,初始化硬件.支持VxWorks和硬件驱动通信.使hardware-dependent 和hardware-independent在VxWorks系统中很好的结合.主要BSP主要文件目录的组成及主要文件的作用:目录target/config/All:这个目录下的文件是所有BSP文件共享的,不是特别需要不要更改里面的任何文件. configAll.h:缺省定义了所有VxWorks的设置.如果不用缺省的设置,可在BSP目录下的config.h文件中用#define或#undef方式来更改设置.bootInit.c:在romInit.s后,完成Boot ROM的第二步初始化.程序从romInit.s中的romInit()跳到这个文件中的romStart().来执行必要的解压和ROM image的放置.bootConfig.c:完成Boot ROM image的初始化和控制.usrConfig.c: VxWorks image的初始化代码.目录target/config/comps/src:涉及系统核心的components,主要由target/config/All中usrConfig.c中函数调用目录target/config/bspname:包含系统或硬件相关的BSP文件.Makefile一些命令行控制images的生成,参见BSP设置部分及生成下载READMEBSP发布纪录,版本,总的文档config.h包括所有涉及CPU主板的设置及定义(includes,definations),参见BSP设置文件及生成下载configNet.h网络驱动的主要设置文件,主要对END驱动设置.romInit.s汇编语言文件,是VxWorks Boot ROM和ROM based image的入口,参见系统启动部分sysALib.s汇编语言文件,程序员可以把自己的汇编函数放在这个文件里,在上层调用.VxWorks image的入口点_sysInit在这个文件里,是在RAM中执行的第一个函数.sysLib.c包含一些系统相关的函数例程,提供了一个board-level的接口,VxWorks和应用程序可以以system-indepent的方式生成.这个文件还能包含目录target/config/comps/src的驱动. sysScsi.c可选文件用于Scsi设备设置和初始化.sysSerial.c可选文件用于所有的串口设置和初始化.bootrom.hexASIC文件包含VxWorks Boot ROM代码VxWorks运行在目标机上,完整的,连结后的VxWorks二进制文件.VxWorks.sym完全的,连结后带有符号表的VxWorks二进制文件VxWorks.st完全的,连结后,standalone,带有符号表的VxWorks二进制文件BSP用"make"来编译连接生成(Created),而不是用Tornado的工具.BSP和应用程序都可以在"make"或"tornade"上开发(developed)BSP被设置包括以下驱动:中断控制interrupt controller,计时器timer(sys/aux),串口UART(serial),显示屏LCD,键盘Keyboard(opt),触摸屏touch-screen(opt).前面三个是BSP的主要部分.BSP默认的download VxWorks RAM image方式是从ethernet.串口电缆需要用来和开发板(COM1)通信,通过协议WDB.VxWorks Image的种类:Loadable images.ROM-based images---compressed/uncompressed.ROM-Resident images.ROM-resident image 对一些系统内存RAM资源较少的情况下,为了节省资源,只拷贝image 中的数据部分(data segment)到内存RAM,留下程序部分(text segment)在ROM中执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VxWorks基本概念Bootrom和Boot image的区别,Boot image和VxWorks image的联系和区别bootrom 是指on-chip bootrom,在CPU芯片内部,内嵌有小的boot程序(bootloader),类似于PC机主板上的BIOS的存储区域。
和boot image不是一回事。
VxWorks文档中的bootrom区是指boot image存放的位置。
boot image的作用是把VxWorks image 加载到主板。
boot image只初始化很少的硬件系统如串口,网口等。
为加载VxWorks image做准备,当VxWorks系统下载完毕后,b oot image的作用也就完成了。
VxWorks image含有完整的VxWorks OS.是真正运行于目标板上的操作系统。
应用程序运行于VxWorks系统之上。
boot image 和VxWorks image生成在使用BSP文件上的区别在于:在启动顺序中Bootrom调用bootConfig.c,而VxWorks调用usrConfig.c.在ROM中VxWorks运行的方式(和bootrom编译到一起还是单独固化到ROM中),在ROM中的内存分配?VxWorks加载到主板运行,分不同的情况,如果VxWorks是压缩的,加载时解压到RAM的RAM_HIGH_ADRS.如果是ROM based VxWorks,VxWorks image的data段复制到RAM的LOCAL_LOW_ADRS, text部分留在ROM并在ROM中执行。
既不压缩又不ROM based的VxWorks直接copy到RAM_LOW_ADRS运行。
若在config.h中修改系统设置,如增加网卡等,是否需要重新烧bootrom?如果增加其他oem产品呢?如果主板中有Boot image存在则不需要重新烧,用FTP等download加载VxWorks 即可。
VxWorks 系统编程中任务级与中断级的通讯如何实现?中断是由硬件触发,软件的作用只是将中断服务例程(ISP)与中断事件连接起来。
1.使能中断,函数intEnable()。
2.用intConnect()登记中断号,和相应的中断例程ISR.这样一旦有中断发生,系统自动跳转到相应位置执行ISR.Bootloader怎么得到,如果对开发板有些改动,还能使用开发板的bootloader吗?bootloader起到什么作用?Bootloader相当于PC机主板上的BIOS,是最底层的引导软件,初始化主板的基本设置,为接收外部程序做硬件上的准备。
有些bootloader已经嵌在CPU内了,没有bootloader的CPU可以在片外的eeprom 内做bootloader,也可以不要bootloader,直接通过JTAG口灌入程序,开发板改动基本上不会影响bootloader.VxWorks 应用程序编译下载时常见问题及原因分析Tornado环境下编译产生的错误:标准C函数或自己的函数,变量不认识(undefined symbol),编译失败。
Tornado支持c 和c++ ,文件后缀为。
cpp时编译器会认为是c++文件,这样有些定义类型为C的函数在编译或下载时不被认可。
解决方法是1.把如果在c++文件(。
cpp)中调用c函数,应该把这些不被认可的c类型函数用语句extern "C"说明一下为c函数。
另外,如果将c文件的后缀小写的。
c误写为大写的。
C,也会出同样的错误,编译时不会编译这个文件。
Tornado环境应用程序下载产生的错误:函数不认识(undefined symbol),下载失败。
虽然编译通过,可是下载时依然会有这样的问题,仍然是函数或变量没有定义。
系统不认识,这是出错的原因基本上时没有定义的错误。
查找包含函数或变量的头文件是否加了进去。
如果实在找不到定义的话,简单的办法是先把这他们去掉(当然是没有其他地方用到的情况下)试一试,先down下去,能运行后,然后添加,再继续查找。
在ARM下不用Boot image,直接烧入VxWorks image的过程有些ARM CPU一般分两种运行方式,一种是Boot方式,一种是normal方式。
在Boot方式下直接烧写VxWorks image到Flash,这种VxWorks image包含有b oot的功能(类似VxWorks.rom形式),中间那段烧写到flash的程序是必须的,第一次通过串口下载VxWorks image到Dram是一个简单的过渡,有boot loader控制。
当烧写完成后,切换CPU到normal模式,系统启动,开始逐行读Flash中的指令,是由VxWorks BSP控制,根据不同的VxWorks image定义,执行不同的操作,例如若V xWorks是压缩的,则解压复制到DRAM的高位地址,……。
VxWorks image 和Boot image中的两次硬件初始化之间的区别Boot image和VxW orks image都对硬件进行了初始化。
两次硬件初始化的是不同的。
BootRom映像主要作用是通过网口或串口下载VxWorks系统,所以它只是初始化很少的硬件系统如串口,网口等来满足下载VxWorks的需要,一旦VxWorks下载完毕。
这些初始化过的硬件的作用也就完成了。
VxWorks启动后会从新对几乎所有的硬件设备进行完全的初始化来满足VxWorks操作系统运行的需要。
汇编语言在VxWorks系统编程的使用:汇编语言主要出现在BSP文件roInit.s,sys Alib.s等,这些汇编指令是系统初始化硬件用的,硬件系统Power up时硬件特别是内存没有初始化,C函数库没有装入内存,系统此时不支持C语言程序,只支持它自己的32位汇编指令,所以只能用汇编指令来初始化硬件,为后续的操作系统包括C语言支持做准备。
在OS正常运行后,就可以用C了。
Tornado不支持汇编指令,汇编在编译连接BSP,生成bootrom或VxWorks映像,才被编译。
有两种方法:1.现在可以在Tornado环境下生成bootrom或建Bootable 的pr oject 生成VxWorks 2.传统的方法,在命令行方式,用make编译生成。
在Tornado下的downloadable的project,application中不能用汇编。
不过一般汇编很少用。
可以与其他bsp文件在tornado下作成bsp或用命令行make. VxWorks 下写驱动需注意的问题1.MMU 对该硬件的地址映射正确(改BSP )2.中断向量表该中断的定义位置,知道相应中断的中断标志位等信息(改BSP )3.查出中断号及中断级别,硬件中断登记(INTCONNECT ),及ISR4.系统任务协调,保证在该程序执行时,没有其它任务占用CPU BSP 概念解析Drew在这里按照自己的理解来解释一下BSP(Board Support Package),仅供参考:BSP是板级支持包,是介于主板硬件和操作系统之间的一层,应该说是属于操作系统的一部分,主要目的是为了支持操作系统,使之能够更好的运行于硬件主板。
BSP是相对于操作系统而言的,不同的操作系统对应于不同定义形式的BSP,例如VxWor ks的BSP和Linux的BSP相对于某一CPU来说尽管实现的功能一样,可是写法和接口定义是完全不同的,所以写BSP一定要按照该系统BSP的定义形式来写(BSP的编程过程大多数是在某一个成型的BSP模板上进行修改)。
这样才能与上层OS保持正确的接口,良好的支持上层OS.例如:在VxWorks中的网卡驱动,首先在config.h中包含该网卡,然后将网卡含网卡的信息的参数放入数组END_TBL_ ENTRY endDevTbl [] 中,系统通过函数muxDevLoad()调用这个数组来安装网卡驱动。
而在Linux中的网卡驱动,是在space.c中声明该网络设备,再把网卡驱动的一些函数加到dev结构中,由函数ether_setup()来完成网卡驱动的安装。
纯粹的BSP所包含的内容一般说来是和系统有关的驱动和程序,如网络驱动和系统中网络协议有关,串口驱动和系统下载调试有关等等。
离开这些驱动系统就不能正常工作。
Tornado中BSP的编译和上层应用程序不同,用命令行或直接在Tornado环境下Buil d,在Tornado下不能跟踪调试。
用户也可以添加自己的程序到BSP中,但严格来说不应该算BSP.一般来说这种做法不建议。
因为一旦操作系统能良好运行于最终的主板硬件后,BSP也就固定了,不需要做任何改动。
而用户自己在BSP中的程序还会不断的升级更新,这样势必对BSP有不好的影响,对系统造成影响,同时由于BSP调试编译环境较差,也不利于程序的编译调试。
上层程序Tools - Applications I/O System VxWorks Libraries TCP/IP Wind Kerne l BSP SCSI Controllerr Controllerr Serial Controller Controller Clock Timer Timer Eth ernet Controller Controller …… ……硬件BSP在嵌入式系统和Windows系统中的不同其实运行与PC机上的windows或Linux系统也是有BSP 的。
只是PC机均采用统一的X86体系架构,这样一定操作系统(windows,Linux……)的BSP相对x86架构是单一确定的,不需要做任何修改就可以很容易支持OS在x86上正常运行,所以在PC机上谈论BSP这个概念也没什么意义了。
而对嵌入式系统来说情况则完全不同,目前市场上多种结构的嵌入式CPU(RISC)并存(PPC,ARM ,MIPS……),为了性能的需要,外围设备也会有不同的选择和定义。
一个嵌入式操作系统针对不同的CPU,会有不同的BSP,即使同一种CPU,由于外设的一点差别(如外部扩展DRAM的大小,类型改变),BSP相应的部分也不一样。
所以根据硬件设计编写和修改BSP,保证系统正常的运行是非常重要的。
BSP和PC机主板上的BIOS区别BSP和PC机主板上的BIOS区别很大,BIOS主要是负责在电脑开启时检测、初始化系统设备(设置栈指针,中断分配,内存初始化……)、装入操作系统并调度操作系统向硬件发出的指令,它的Firmware代码是在芯片生产过程中固化的,一般来说用户是无法修改。
其实是为下载运行操作系统做准备,把操作系统由硬盘加载到内存,并传递一些硬件接口设置给系统。
在OS正常运行后,BIOS的作用基本上也就完成了,这就是为什么更改BIOS一定要从新关机开机。