APM中文使用手册Word版
APM-204C_208C MCPRO2使用手册
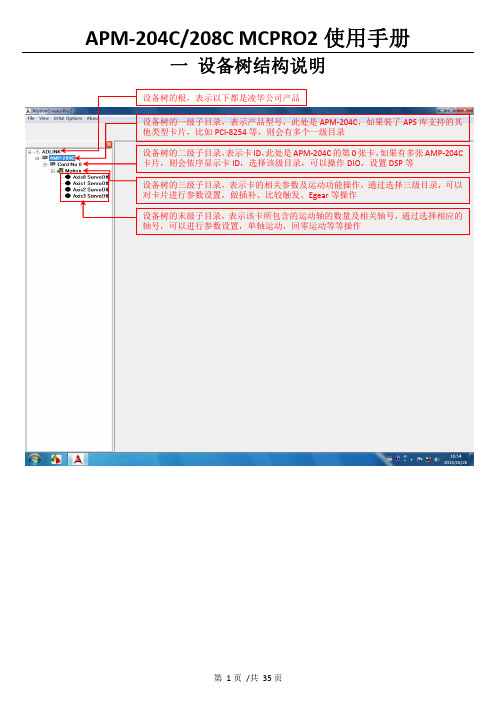
一 设备树结构说明二 设备树目录对应的菜单项及工具栏2.1 根目录及一级子目录(AMP ‐204C 子目录)2.1.1 对应菜单1、Initial Options 菜单项2、About 菜单项该菜单项用于获取MCPRO2版本信息、数据库版本信息及MCPRO2所支持的产品信息等等。
3、根目录右键菜单当选择ADLINK 根目录,右键点击,弹出保存/载入所有参数菜单,如下所示2.2 二级子目录(Card No 0子目录)2.2.1对应菜单及工具栏当选中相应的卡ID 目录(例如Card No 0),会弹出如下DIO 和DSP 操作菜单及工具栏2.2.2 右键菜单当选中相应的卡ID2.3 三级子目录(Motion 子目录)2.3.1对应工具栏2.3.2对应菜单栏2.3.3 右键菜单当选中相应卡ID 目录(例如Card No 0)下的Motion ,右击 会弹出如下右键菜单ServoOn 该卡下面的所有轴ServoOff 该卡下面的所有轴2.4 末级子目录(单轴操作子目录)2.4.1对应工具栏当选中相应的轴号时,会弹出如下工具栏2.4.2对应菜单栏2.4.3 右键菜单三 MCPRO2操作3.1 设置向导(SetupWizard )选择要操作的轴,在工具栏点击SetupWizard 按钮,弹出SetupWizard 对话框。
如下图示。
Step 1:Control Mode (控制模式)该步骤用于设置板卡控制模式及伺服更新率。
但是为防止客户误操作,控制模式设置和伺服更新率设置被移出该步骤。
如果要设置,请参考下面的设置。
1、选择要操作的轴2、点击SetupWizard按钮3、弹出SetupWizard对话框1、更改控制模式:注意:请根据每个轴使用的电机类型来设置每个轴的控制模式,控制模式一旦设定,请勿随意变更。
1、先选择Motion 子目录点击此按钮保存设置2、设置伺服更新率:以下两种方式都可以设置伺服更新率: 方式1:方式2:注意:如非必要,请勿随意更改伺服更新率。
APM32F072x8xB 32位微控制器数据手册说明书

数据手册DatasheetAPM32F072x8xB基于Arm® Cortex®-M0+内核的32位微控制器版本:V1.5产品特性⏹内核32位Arm®w Cortex®-M0+内核最高48MHz工作频率⏹片上存储器Flash:64~128KBSRAM:16KB⏹时钟4~32MHz晶体振荡器带校准的32.768KHzw晶体/陶瓷振荡器内部8MHzwRC振荡器内部48MHz自动校正RC振荡器内部40KHzwRC振荡器PLL支持2~16倍频⏹复位、电源管理上电/掉电复位(POR/PDR)可编程电压调节器数字供电电压:V DD=2.0~3.6V模拟供电电压:V DDA=V DD~3.6V部分I/O供电电压:V DDIO2=1.65~3.6V支持外部电池V BAT为RTC供电:V BAT=1.65~3.6V⏹低功耗模式睡眠、停机、待机模式⏹串行线调试(SWD)⏹I/O最多87个I/Os所有I/O可映射到外部中断向量最多68个容忍5V输入的I/O,19个I/O由V DDIO2供电⏹通信接口2个I2C接口(1Mbit/s),全部支持SMBus/PMBus和唤醒。
4个USART接口,全部支持主同步SPI和调制解调控制,其中2个支持ISO7816、LIN、IrDA接口、自动波特率检测和唤醒。
2个SPI接口(18Mbit/s),全部支持I2S接口复用1个CAN接口1个全速USBD2.0接口,无需外挂晶振,支持BCD和LPMHDMIwCEC⏹模拟外设1个12位ADC,最多支持16个外部通道,转换范围0~3.6V,独立模拟电源输入:2.4~3.6V1个双通道、12位DAC2个可编程模拟比较器最多24个电容传感通道,可用于接近、触键、线性或旋转传感器⏹定时器1个可提供最多7通道PWM输出的16位的高级控制定时器,支持死区生成和刹车输入功能1个32位和5个16位通用定时器,每个定时器最多有4个独立通道用于输入捕获/输出比较。
APM-204C_208C MCPRO2使用手册
一 设备树结构说明二 设备树目录对应的菜单项及工具栏2.1 根目录及一级子目录(AMP ‐204C 子目录)2.1.1 对应菜单1、Initial Options 菜单项2、About 菜单项该菜单项用于获取MCPRO2版本信息、数据库版本信息及MCPRO2所支持的产品信息等等。
3、根目录右键菜单当选择ADLINK 根目录,右键点击,弹出保存/载入所有参数菜单,如下所示2.2 二级子目录(Card No 0子目录)2.2.1对应菜单及工具栏当选中相应的卡ID 目录(例如Card No 0),会弹出如下DIO 和DSP 操作菜单及工具栏2.2.2 右键菜单当选中相应的卡ID2.3 三级子目录(Motion 子目录)2.3.1对应工具栏2.3.2对应菜单栏2.3.3 右键菜单当选中相应卡ID 目录(例如Card No 0)下的Motion ,右击 会弹出如下右键菜单ServoOn 该卡下面的所有轴ServoOff 该卡下面的所有轴2.4 末级子目录(单轴操作子目录)2.4.1对应工具栏当选中相应的轴号时,会弹出如下工具栏2.4.2对应菜单栏2.4.3 右键菜单三 MCPRO2操作3.1 设置向导(SetupWizard )选择要操作的轴,在工具栏点击SetupWizard 按钮,弹出SetupWizard 对话框。
如下图示。
Step 1:Control Mode (控制模式)该步骤用于设置板卡控制模式及伺服更新率。
但是为防止客户误操作,控制模式设置和伺服更新率设置被移出该步骤。
如果要设置,请参考下面的设置。
1、选择要操作的轴2、点击SetupWizard按钮3、弹出SetupWizard对话框1、更改控制模式:注意:请根据每个轴使用的电机类型来设置每个轴的控制模式,控制模式一旦设定,请勿随意变更。
1、先选择Motion 子目录点击此按钮保存设置2、设置伺服更新率:以下两种方式都可以设置伺服更新率: 方式1:方式2:注意:如非必要,请勿随意更改伺服更新率。
APM32F407 417xExG 用户手册说明书

用户手册APM32F407/417xExG基于Arm® Cortex®-M4 内核的32位微控制器版本:V 1.0目录简介及文档描述规则 (9)简介 (9)文档描述规则 (9)系统架构 (12)术语全称、缩写描述 (12)系统架构框图 (12)存储器映射 (14)启动配置 (14)FLASH存储器 (16)术语全称、缩写描述 (16)简介 (16)主要特征 (16)FLASH存储器结构 (17)FLASH存储器功能说明 (17)寄存器地址映射 (22)寄存器功能描述 (23)外部存储器控制器(EMMC) (27)术语全称、缩写描述 (27)EMMC概述 (27)SMC简介 (27)SMC结构框图 (28)SMC功能描述 (28)SMC寄存器地址映射 (33)SMC寄存器功能描述 (33)DMC简介 (42)DMC主要特征 (42)DMC结构框图 (42)DMC功能描述 (42)DMC寄存器地址映射 (44)DMC寄存器功能描述 (45)系统配置控制器(SYSCFG) (50)主要特征 (50)I/O补偿单元 (50)寄存器地址映射 (50)寄存器功能描述 (50)复位与时钟(RCM) (54)术语全称、缩写描述 (54)复位管理单元(RMU) (54)时钟管理单元(CMU) (56)寄存器地址映射 (63)寄存器功能描述 (64)电源管理单元(PMU) (92)术语全称、缩写描述 (92)简介 (92)结构框图 (93)功能描述 (93)寄存器地址映射 (98)寄存器功能描述 (98)嵌套向量中断控制器(NVIC) (101)术语全称、缩写描述 (101)简介 (101)主要特征 (101)中断和异常向量表 (101)外部中断/事件控制器(EINT) (108)简介 (108)功能描述 (108)寄存器地址映射 (110)寄存器功能描述 (111)直接存储访问(DMA) (113)简介 (113)主要特征 (113)功能描述 (113)DMA寄存器地址映射 (118)寄存器功能描述 (118)调试MCU(DBGMCU) (126)术语全称、缩写描述 (126)简介 (126)主要特征 (126)功能描述 (127)寄存器地址映射 (128)寄存器功能描述 (128)通用输入/输出引脚(GPIO) (133)术语全称、缩写描述 (133)主要特征 (133)结构框图 (134)功能描述 (134)寄存器地址映射 (137)寄存器功能描述 (137)定时器概述 (142)术语全称、缩写描述 (142)定时器类别及主要差异 (142)高级定时器(TMR1/8) (145)简介 (145)主要特征 (145)结构框图 (146)功能描述 (146)寄存器地址映射 (161)寄存器功能描述 (162)通用定时器(TMR2/3/4/5) (180)简介 (180)主要特征 (180)结构框图 (181)功能描述 (181)寄存器地址映射 (193)寄存器功能描述 (194)通用定时器(TMR9/10/11/12/13/14) (210)简介 (210)TMR10/11/13/14主要特征 (210)TMR9/12结构框图 (211)TMR10/11/13/14结构框图 (212)功能描述 (212)TMR9/12寄存器地址映射 (219)TMR9/12寄存器功能描述 (219)TMR10/11/13/14寄存器地址映射 (228)TMR10/11/13/14寄存器功能描述 (229)基本定时器(TMR6/7) (236)简介 (236)主要特征 (236)结构框图 (236)功能描述 (236)寄存器地址映射 (238)寄存器功能描述 (238)看门狗定时器(WDT) (242)简介 (242)独立看门狗定时器(IWDT) (242)窗口看门狗定时器(WWDT) (243)IWDT寄存器地址映射 (245)IWDT寄存器功能描述 (245)WWDT寄存器地址映射 (247)WWDT寄存器功能描述 (247)实时时钟(RTC) (249)术语全称、缩写描述 (249)简介 (249)主要特征 (249)结构框图 (249)功能描述 (250)寄存器地址映射 (255)寄存器功能描述 (255)HASH处理器(HASH) (271)主要特征 (271)功能描述 (271)寄存器地址映射 (272)寄存器功能描述 (272)数字摄像接口(DCI) (276)术语全称、缩写描述 (276)简介 (276)主要特征 (276)结构框图 (277)功能描述 (277)寄存器地址映射 (281)寄存器功能描述 (281)通用同步异步收发器(USART) (287)术语全称、缩写描述 (287)简介 (287)主要特征 (287)功能描述 (288)寄存器地址映射 (300)寄存器功能描述 (301)内部集成电路接口(I2C) (308)术语全称、缩写描述 (308)简介 (308)主要特征 (308)结构框图 (310)功能描述 (310)寄存器地址映射 (316)寄存器功能描述 (316)串行外设接口/片上音频接口(SPI/I2S) (325)术语全称、缩写描述 (325)简介 (325)主要特征 (325)SPI功能描述 (326)寄存器地址映射 (347)寄存器功能描述 (347)控制器局域网(CAN) (354)术语全称、缩写描述 (354)简介 (354)主要特性 (354)功能描述 (354)寄存器地址映射 (362)寄存器功能描述 (363)安全数字输入输出接口(SDIO) (380)术语全称、缩写描述 (380)简介 (380)主要特征 (380)功能描述 (380)寄存器地址映射 (399)寄存器功能描述 (400)USB_OTG (411)简介 (411)OTG_FS全局寄存器地址映射 (411)OTG_FS全局寄存器功能描述 (412)OTG_FS主机模式寄存器地址映射 (425)OTG_FS主机模式寄存器功能描述 (426)OTG_FS设备模式寄存器地址映射 (432)OTG_FS设备模式寄存器功能描述 (433)全速OTG电源和时钟门控控制寄存器(OTG_FS_PCGCTRL) (446)OTG_HS1全局寄存器地址映射 (446)OTG_HS1全局寄存器功能描述 (447)OTG_HS1主机模式寄存器地址映射 (463)OTG_HS1主机模式寄存器功能描述 (464)OTG_HS1设备模式寄存器地址映射 (471)OTG_HS1设备模式寄存器功能描述 (472)高速OTG电源和时钟门控控制寄存器(OTG_HS1_PCGCTRL) (488)OTG_HS2寄存器功能描述 (489)以太网(ETHERNET) (492)简介 (492)以太网主要特征 (492)功能描述 (494)MAC寄存器地址映射 (518)MAC寄存器功能描述 (518)MMC寄存器地址映射 (531)MMC寄存器功能描述 (532)PTP寄存器地址映射 (535)PTP寄存器功能描述 (535)DMA寄存器地址映射 (539)DMA寄存器功能描述 (540)模数转换器(ADC) (550)术语全称、缩写描述 (550)简介 (551)主要特征 (551)功能描述 (552)寄存器地址映射 (561)寄存器功能描述 (562)数模转换器(DAC) (572)术语全称、缩写描述 (572)简介 (572)结构框图 (572)功能描述 (572)寄存器地址映射 (575)寄存器功能描述 (576)随机数(RNG) (582)简介 (582)主要特征 (582)功能描述 (582)寄存器地址映射 (583)CRYP (585)简介 (585)主要特性 (585)中断 (585)DMA (585)寄存器地址映射 (586)寄存器功能描述 (586)循环冗余校验计算单元(CRC) (591)简介 (591)功能描述 (591)寄存器地址映射 (591)寄存器功能描述 (591)芯片电子签名 (593)简介 (593)寄存器功能描述 (593)版本历史 (594)简介及文档描述规则简介本用户手册向应用程序开发人员提供关于如何使用MCU(微控制器)系统架构、存储器和外设所涉及的全部信息。
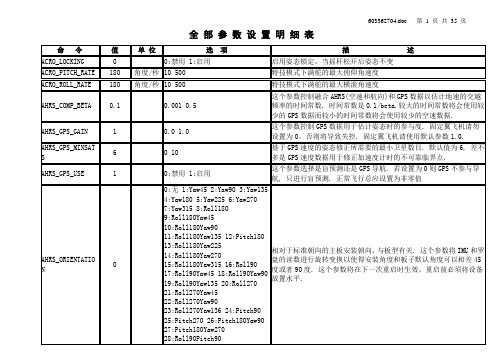
APM全部参数表
AHRS_YAW_P
0.2
0.1 0.4
ALT_CTRL_ALG
0
0:自动
ALT_HOLD_FBWCM
0
厘米
ALT_HOLD_RTL
10000
厘米
ALT_MIX
1
百分比 0 1
603362704.doc
第 3 页 共 35 页
空开启的 GPS, 例如你在离地几千米的地方从气球上抛下一个飞机 时. ALT_OFFSET 0 米 -32767 32767 这是在自动飞行模式下加入到目标高度数值的高度偏移量. 这可以 用来在自动模式中加入全球高度偏移ARMING_DIS_Fra bibliotekUD0
ARMING_REQUIRE
2
0:禁用 1:解锁后油门 PWM 在 THR_MIN(怠速) 2:解锁后油门 0PWM(停转)
ARSPD_AUTOCAL ARSPD_ENABLE ARSPD_FBW_MAX ARSPD_FBW_MIN ARSPD_OFFSET
0 0 22 9 833.2711
AHRS_ORIENTATIO N
0
相对于标准朝向的主板安装朝向, 与板型有关. 这个参数将 IMU 和罗 盘的读数进行旋转变换以使得安装角度和板子默认角度可以相差 45 度或者 90 度. 这个参数将在下一次重启时生效,重启前必须将设备 放置水平.
603362704.doc
第 2 页 共 35 页
ARSPD_RATIO ARSPD_SKIP_CAL
1.9936 0
ARSPD_TUBE_ORDE R
2
ARSPD_USE
0
AUTO_FBW_STEER
0
0:禁用 1:启用
APM150用户手册

安全注意事项
本手册内容涉及艾默生 APM 150、APM 150P、APM 150S 集成 UPS 系统(以下简称“UPS” )的安装和使用。 安装前必须先阅读本手册。 UPS 必须由厂家或其代理商指定工程师进行调试和维护。否则可能危及人身安全和导致设备故障,由此引起的设备 损坏,不属保修范围。 UPS 只作商业和工业用途,不可用作任何生命支持设备的电源。 本产品是 C3 类 UPS,用于住宅区可能产生射频干扰。在这种情况下,要求使用者采取附加措施。
电池电压高于 400Vdc 所有电池的物理保养和维护都需使用工具或钥匙,并应由接受过相关培训的人员执行。 电池的使用需要特别小心。电池连接后,电池端电压将超过 400Vdc,人身接触会有致命的危险。 电池厂家提供了使用电池组或在其附近所应遵守的注意事项,这些注意事项在任何时候都应得到遵守。并且应特别注意关于当 地环境条件的相关建议及提供防护工作服,急救设备和消防设备的相关规定。
警告:反灌保护 UPS 提供一零电压触点闭合信号配合外部自动断路器(单独供电)一起使用,以防止电压通过静态旁路电路回馈到输入端。如 果安装人员无需使用此信号,必须在外部旁路输入开关设备上贴上标签,以示维护人员此电路与 UPS 相连。 标签可写作:请在操作此电路前将 UPS 隔离。
用户可维护器件 所有设备内部维护及保养工作都需使用工具,并且应该由接受过相关培训的人员执行。需使用工具才能打开的保护盖板后的器 件为用户不可维护器件。 UPS 完全满足使用操作区设备安规要求。UPS 内部带有危险电压,但非维护人员接触不到。由于带有危险电压的元器件只有使 用工具打开保护盖板后才能接触到,接触高压的可能性已降到最小。如果遵照一般规范并按照本书所建议的步骤进行设备的操 作,将不会存在任何危险。
APM的帮助文件中文版

练习1. 同源模建PART I. FUGUE前言HI0029是一个青霉素受体结合蛋白5前体,由393个氨基酸残基组成,复合物的结构已经被结晶出来,然而还没有关于其的三维结构信息,本教程的目标就是通过FUGUE这个序列识别工具识别其同源蛋白。
运行FUGUE1.在开始之前先清空屏幕并重置所有的显示> Delete Everything点击显示工具栏上的重置所有移动和旋转2.运行FUGUEBiopolymer > Model Proteins > FUGUE > Run FUGUEFUGUE对话框出现3.导入数据设定Input Sequence菜单为FASTA File点击旁边的[...]打开文件浏览器选择书签列表中的[$TA_DEMO],选择文件列表中的HI0029.fasta设定Profiles to Search菜单为All Profiles4.查看对话框上的选项这是一个不包含PSI-BLAST简单的FUGUE运行程序默认情况下,会报道10个默认的FUGUE家族5.执行任务在Jobname处填上HI0029点击OK开始运行程序分析FUGUE结果1.读取程序运行结果Biopolymer > Model Proteins > FUGUE > View FUGUE ResultsFUGUE Results对话框弹出点击Run Directory旁边的[...]选择文件列表中的HI0029然后点击OK对话框中的列表显示:相对于三个家族HI0029的得分比较高,这三个家族的ZSCORE都大于6,并且置信度为99%,其后由CERTAIN表示。
2.观察结果点击列表上方的View HTML Summary完成后点击OK关闭浏览窗口在FUGUE Results对话框中,选择ma叠合方式点击View alignmentma选项允许查看所有相应于HOMSTRAD家族中同源蛋白的序列叠合结果。
APM5 系列网络电力仪表 安装使用说明书 V1.1
475APM5系列网络电力仪表安装使用说明书V1.1安科瑞电气股份有限公司申明版权所有,未经本公司之书面许可,此手册中任何段落、章节内容均不得被摘抄、拷贝或以任何形式复制、传播,否则一切后果由违者自负。
本公司保留一切法律权利。
本公司保留对本手册所描述之产品规格进行修改的权利,恕不另行通知。
订货前,请垂询当地代理商以获悉本产品的最新规格。
总部:安科瑞电气股份有限公司地址:上海市嘉定区育绿路253号销售电话:************销售手机:187****7862(同微信)柏经理售后服务热线:************上海售后服务部*************江阴售后服务部目录1.概述 (1)1.1型号功能 (1)1.2功能选型 (2)1.3技术参数 (3)2.安装接线 (5)2.1外形及安装尺寸 (5)2.2安装方法 (6)2.3工程施工注意事项 (6)2.3.1电压输入 (6)2.3.2电流输入 (7)2.3.3通讯接线 (7)2.4接线方法 (7)2.4.1接线图 (7)3.操作说明 (12)3.1导航按键字符号说明 (12)3.2菜单显示总览 (12)3.3界面介绍 (14)3.3.1主界面 (14)3.3.2菜单界面 (14)3.3.3矢量图界面 (15)4.查看数据信息 (15)4.1查看事件记录 (15)4.1.1查看DIDO记录 (15)4.1.2查看报警信息 (15)4.1.3查看录波记录: (16)5.参数设置 (16)5.1参数设置界面 (16)5.2输入设置 (17)5.3通信设置 (18)5.4无线设置 (19)5.5报警设置 (19)5.6DO设置 (22)5.7AO设置 (23)5.8复费率设置 (24)5.8.2切换日期设置 (25)5.9录波设置 (26)5.10需量设置 (27)5.11系统设置 (27)5.12清除设置 (29)5.13版本信息 (30)6.Modbus通讯说明 (30)6.1简介 (30)6.2通讯地址表 (30)7.以太网通讯指南 (61)7.1以太网参数修改 (61)7.1.1通过按键修改 (61)7.2Modbus TCP寄存器地址 (61)8.DL/T-645通讯指南 (61)8.1DL/T645-2007协议简述 (61)8.2传输方式 (61)8.3协议 (61)8.3.1数据帧格式 (62)8.3.2传输 (62)8.3.3数据标识表 (63)9.常见故障排查分析 (67)10.包装 (67)1.概述APM5系列网络电力仪表(以下简称仪表)按IEC 国际标准设计,具有全电量测量、电能统计、电能质量分析(包括谐波、间谐波、闪变)、故障录波功能(包括电压暂升暂降中断、冲击电流等记录)、事件记录功能及网络通讯等功能,主要用于电网供电质量的综合监控。
APM固定翼设置完整手册(方少版)

输入引脚供电,但输出引脚将需要自己的电源。如果你想在飞机上用两个独立的 电源,可以使用这种配置,一个为舵机供电,一个为其他电子设备供电。
APM2 设计要求一个清洁、良好滤波的电源。注意根据连接的插头不同,电压规 格要求是不同的。原因是有一个肖特基二极管(二极管 D1),防止 USB 端口在 连接时给 APM2 的 PWM 输出接口供电而损坏东西。因此,当 USB 未通电, 并通过 PWM 输出连接器连接电源时,横跨这个二极管有一些压降,所以要求更 高的输入电压来做补偿。因此,电力需求如下:跳线 JP-1 断开时,5.0VDC +/- 0.5V 到 PWM 输入接口。跳线 JP-1 连接时,5.37VDC +/- 0.5V 到 PWM 输出接口。
需要更快的设定及启动吗?这个导览提供了一个简单的方法。ArduPlane 还有许 多的功能需要设定,但这几篇文章可以让你尝鲜:
1. 安装驱动及 Mission Planner 2. 连接遥控设备 3. 首次设置 4. APM 开机和校准 5. 规划航点和任务
没关系,只要从 这里下载驱动程序,保存到电脑的一个文件夹里。
• 无内置电压监测。大多数人觉得电流监测比电压有用,所以我们现在推荐 Sparkfun 电流传感器,可插入到一个传感器的插座上。
APM 1 和 APM 2 的差别
APM 1 和 APM 2 之间的主要功能差异是传感器。 AMP 2 拥有先进的 InvenSense MPU-6000 陀螺仪/加速计芯片,它有自己的传感器融合处理器。它 还有一个测量海拔的高精度压力传感器。
还不要点击“Connect”! 请先将固件程序加载你的 APM。
APMS实施流程操作手册(word版)
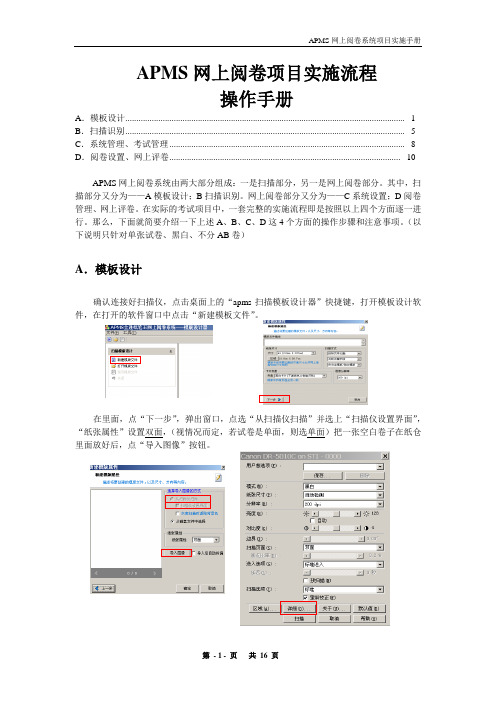
APMS网上阅卷项目实施流程操作手册A.模板设计............................................................................................................................... - 1 - B.扫描识别............................................................................................................................... - 5 - C.系统管理、考试管理........................................................................................................... - 8 - D.阅卷设置、网上评卷......................................................................................................... - 10 -APMS网上阅卷系统由两大部分组成:一是扫描部分,另一是网上阅卷部分。
其中,扫描部分又分为——A模板设计;B扫描识别。
网上阅卷部分又分为——C系统设置;D阅卷管理、网上评卷。
在实际的考试项目中,一套完整的实施流程即是按照以上四个方面逐一进行。
那么,下面就简要介绍一下上述A、B、C、D这4个方面的操作步骤和注意事项。
(以下说明只针对单张试卷、黑白、不分AB卷)A.模板设计确认连接好扫描仪,点击桌面上的“apms扫描模板设计器”快捷键,打开模板设计软件,在打开的软件窗口中点击“新建模板文件”。
在里面,点“下一步”,弹出窗口,点选“从扫描仪扫描”并选上“扫描仪设置界面”,“纸张属性”设置双面,(视情况而定,若试卷是单面,则选单面)把一张空白卷子在纸仓里面放好后,点“导入图像”按钮。
APM for PX4飞控使用手册-第二章:组装PX4FMU和PX4IO-中文翻译

APM for PX4飞控使用手册第二章:使用PX4FMU与PX4IO组装飞机——sw笨笨翻译1.介绍:本文介绍PX4飞控的安装,是使用PX4FMU和PX4IO的方案。
2.PX4FMU与PX4IO的组装1)首先将PX4套件中PX4IO板上的9x3针的接插件焊接在板子右侧(这是舵机连接接插件——译者注),那边有“PX4 autupilot”(应该是SERVOS——译者注)的字样。
注意:接插件的方向是塑料绝缘层朝向电路板后方(就是向外因为要插舵机——译者注)2)将小型的白色接插件2针的PAP-02-VS焊接到PX4IO板电池焊盘的正后边。
3)安装PX4IO到PX4FMU板上a)气压计需要保护,免于受到风,乱流,运动和螺旋桨涡流的影响,需要进行如下步骤。
(如果是多旋翼飞行器,我认为气压计距离螺旋桨较远应该可以省略这步,这是给直升机预备的——译者注)i.剪下大约1/2英寸大小的一块软泡沫,要比PX4FMU板载接插件小一些。
ii.在插接PX4FMU和PX4IO之前,将这块泡沫放置在两块板中间。
iii.这块围绕的附件能够减轻气压计的问题,但是需要确保其不干扰磁力计。
b)将PX4FMU板和PX4IO板的接插件连接,需要检查确保全部阵脚没有弯曲并且完全插入。
c)将组合完成的PX4飞控牢固的水平安装在旋翼飞行器的中心位置。
d)正常情况下PX4FMU应该安装在顶部。
e)但是如果将PX4IO安装在顶部则有利于的接插件安装与卸下。
f)如果将PX4IO安装在顶部,那么就不用在Mission Planner 的高级选项中的“Board Orientation (AHRS_ORIENTATION)”选项中选择“Roll 180”。
g)电路板上的箭头应该指向飞行器的前方。
h)MicroSD卡(TF卡——译者注)插座应该指向飞行器后方。
4)使用硬件中包含的固定螺丝a)无论那个电路板的哪面朝上,使用黑色尼龙螺栓(一面是螺纹,一面是螺纹孔的应该叫做尼龙螺柱——译者注)从下向上穿过上面那个电路板固定孔,并且在顶上安装尼龙螺母。
服务器性能监控APM快速安装操作手册

APM快速操作手册1.下载apm (2)2.安装apm (2)系统要求 (2)硬件要求 (2)3.新建监视器 (10)Windows监视器 (10)url序列监视器 (12)Apache (16)Mysql (17)4.报表 (19)5.邮件服务器的配置 (20)6.动作 (21)7.阈值 (24)Windows阈值配置: (24)8.告警 (28)1.下载apm填写“*”标注信息下载apm,下载地址为:/manageengine/products/applications_manager/downloa d-info.html用户手册地址/manageengine/products/applications_manager/help /index.html更多产品文档参考/manageengine/products/applications_manager/doc ument.html2.安装apm系统要求本节列出安装和运行Applications Manager所需的最低要求。
硬件要求Applications Manager的性能很大程度上依赖于系统的CPU和内存。
下表列出运行产品推荐的系统配置。
中等规模部署 : 250 - 1000个监视器(一个管理服务器和2-3个被管服务器)大规模部署 : 1000个监视器以上 -企业版(一个管理服务器和4个被管服务器或更多)软件要求Applications Manager的Web客户端推荐的最佳分辨率为1024 x 768或更高。
支持的操作系统经测试,Applications Manager 支持以下操作系统和版本:∙Windows 2000 Server / Professional / XP / 2003/2008/Vista∙RedHat Linux 8.0 及以上∙Enterprise Linux 2.1及以上/ Debian / Suse / Ubuntu/ Mandriva / CentOS / Fedora Core注意:请在安装之前到博客上浏览Windows和Linux版本的功能对比。
APM 30 使用手册说明书
Tursdale Technical Services Ltd■. Introduction (3)1.1 Precautions safety measures (3)1.1.1 During use (3)1.1.2 Maintaining the product (3)■. Features (3)■. Names of parts (4)Instrument Familiarization (4)■. Operation instruction (5)■. Keys instruction (6)■. Maintenance (7)1. CLEANING INSTRUCTIONS (7)2. BATTERY REPLACEMENT (7)■. IntroductionThank you for purchasing the pressure measuring instrument from us. Please take a few minutes to browse through this user manual before you begin to operate the meter to ensure that you are fully familiarized with how best to operate the meter as accurately and safely as possible.This meter is an absolute pressure measuring instrument. It is normally used to measure absolute pressure,e.g. for pressure compensation in velocity measurement in ducts, laboratories and production processes. Barometric measurements and height measurements between two points are also possible.1.1 Precautions safety measuresTo get the best service from this meter, please read this user's manual carefully and observe the detailed safety precautions strictly.1.1.1 During use1. This product is only applicable to measure the majority of non-corrosive gases and air-drying medium.2. If the OL symbol will show on the LCD, it means the readings is outside the measuring range. Please keep to the permitted measuring range.3. To measure the barometric pressure, the height above mean sea level must be set correctly.To measure the height between two points, the height above mean sea level at the starting point must be known and set correctly.4. Never store the product together with solvents, acides or other aggressive substances.5. When the battery voltage is under proper operation requirement, the symbol will show on the LCD and the battery need to be replaced with new.1.1.2 Maintaining the productz Do not measure at a high temperature, high humidity places.z When not using the instrument for a long time, please remove the battery and avoid storing in high temperature and high humidity.■. Features1. Display: 6 digits LCD Display2. Parameters(absolute/barometric)Pa, hPa, mbar, mmH2O, mmHg,inHG, inH2O, psi3. Resolution: 0.1 hPa, 0.1 inH2O4. Range:300…1,200 hPa,120.4…481.8inH2O5. Accuracy:±3.0hPa, ±1.2 inH2OBasic conditions 18.0℃~28.0℃, Humidity<80%6. Sample rate: 1 time /sec7. auto power off: about 20 minutes8. low battery indicator9. Operating environment:0℃ ~ 50 ℃(32℉~122℉) 0 ~ 80%RH10. Storage environment:-20℃ ~ 60℃(-4℉~140℉) 0 ~ 80%RH 11. Dimension and Weight:121(L)x60(W)x30(H)mm, about 180g 12. Accessories:DC1.5V (AAA) x 3pcsString x 1pcsPlastic box x 1pcsUsers manual x 1pcs■. Names of parts Instrument Familiarization1. Sensor cover3. LCD display4. Function keyz LCD DisplayThe meaning of the symbols represented by the following table■. Operation instruction1. P lease install new batteries on the meter .2. C onnect the flexible hose of the measured object to the meter’s nipple connection.3. P ress the ON/OFF key to turn the power on.4. A fter power on, press the Unit key to select the needed units.5. W hen the reading has been stable, read the pressure value.* If you still need more operations, please see the description of keys instruction.Func.■. Keys instruction1. O N/OFF keyPress the key to turn the power ON and press the key once more to turn the power OFF.2. M ode key 1) M ode setPress the key can select the state of MAX MIN HOLD. The cycle of views shows as following figure:z Hold mode: Reading are held.z Max mode: Maximum values since the instrument was last switched on or last reset. z Min mode: Minimum values since the instrument was last switched on or last reset. 2) A uto power off setWhen the meter is powered on, it is under auto power off mode. The meter will power itself off after 20 minutes if no key operation.Cancelled auto power off function: press Mode key when power on until the LCD display AP OFF , then press the ON/OFF key to confirm the setting.3. F unc. key 1) F unc. setPress the key can shift the measurement state between pressure and relative altitude. 2) A ltitude state settingUnder the state of measuring the relative altitude, press the Func. key>2sec. to enter the initail altitude setting. As shown in following figure:When setting the initail altitude, the flashing bit is the current setting bit: Mode key —increase the value of the current setting bit. Unit key —comfirm the current bit and then turn to the next.Func. Key —store the setting and then return the state of measuring the relative altitude.When the lasted bit has been comfirmed, it will store the setting automatically and exit the setting state.4. U nit key 1) U nit setIn pressure state—change different pressure units,adjustalbe units: mmHg, pa, inHg, mBa, mmH2O,inH2O, hpa, psiIn altitude state—change altitude units of meter or feet.2) B ack light contrlIf press the key >2sec. the back light will be turned on, Press the key once >2sec. the light will be turned off. If the back light is not closed within 60 seconds, it will be turned off automatically.■. Maintenance1. CLEANING INSTRUCTIONSThe meter may be wiped down with a wet sponge or cloth using a mild water based detergent or anti-bacterial soap and rinsed under a gentle stream of cold water.NOTE:This unit is not designed for complete submersion or washing in water.2. BATTERY REPLACEMENTUse the following procedure:When the battery voltage drop below proper operation range thethe battery need to be replaced.* Press the battery cover and towards arrowhead direction to open the battery cover.* Replace the battery with three new 1.5V batteries (AAA).* Replace the battery cover.In this direction will find a vision of the measurement technique:/measuring-instruments.htmNOTE: "This instrument doesn’t have ATEX protection, so it should not be used in potentially explosive atmospheres (powder, flammable gases)."。
APM2 .5 中文快速入门指南- 第一篇硬件和常用软件
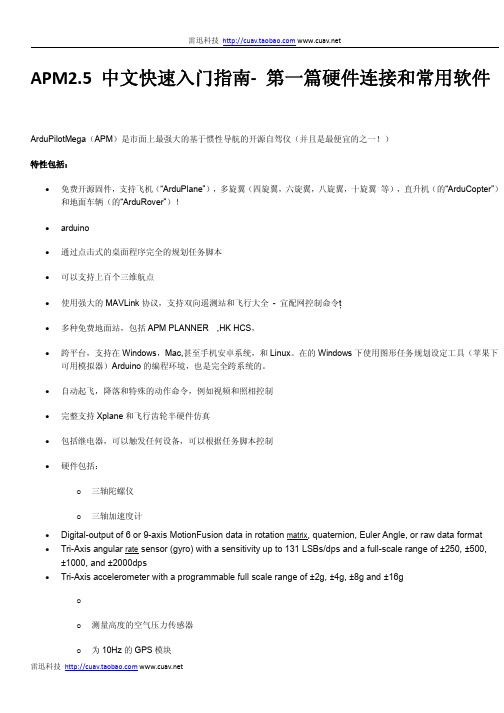
APM2.5中文快速入门指南-第一篇硬件连接和常用软件ArduPilotMega(APM)是市面上最强大的基于惯性导航的开源自驾仪(并且是最便宜的之一!)特性包括:∙免费开源固件,支持飞机(“ArduPlane”),多旋翼(四旋翼,六旋翼,八旋翼,十旋翼等),直升机(的“ArduCopter”)和地面车辆(的“ArduRover”)!∙arduino∙通过点击式的桌面程序完全的规划任务脚本∙可以支持上百个三维航点∙使用强大的MAVLink协议,支持双向遥测站和飞行大全-宜配网控制命令ţ∙多种免费地面站,包括APM PLANNER,HK HCS,∙跨平台,支持在Windows,Mac,甚至手机安卓系统,和Linux。
在的Windows下使用图形任务规划设定工具(苹果下可用模拟器)Arduino的编程环境,也是完全跨系统的。
∙自动起飞,降落和特殊的动作命令,例如视频和照相控制∙完整支持Xplane和飞行齿轮半硬件仿真∙包括继电器,可以触发任何设备,可以根据任务脚本控制∙硬件包括:o三轴陀螺仪o三轴加速度计∙Digital-output of6or9-axis MotionFusion data in rotation matrix,quaternion,Euler Angle,or raw data format ∙Tri-Axis angular rate sensor(gyro)with a sensitivity up to131LSBs/dps and a full-scale range of±250,±500,±1000,and±2000dps∙Tri-Axis accelerometer with a programmable full scale range of±2g,±4g,±8g and±16goo测量高度的空气压力传感器o为10Hz的GPS模块雷迅科技 o监视电池状态的电压传感器o16MB板上数据记录存储器,任务数据自动记录,并可以导出为KML的格式o三轴磁力计o(可选)空速传感器o(可选)电流传感器APM对于玩家的要求较深的航模知识玩飞控的想法符合实际有一定的电子基础略懂英文及编程硬件技术参数如下:六轴数字传感器MPU6000三轴数字磁阻5883L数字气压计MS561110HZ MTK3329GPS16M TF CARD雷迅科技 11路模拟输入端(每一路都带ADC转换)11路PWM输出8路PWM输入1路PPM输入3路UART可接数传GPS OSD扩展拥有目前开源项目上最完善的直升机固定翼多旋翼车船软件系统构成1.APM2.5主板2.GPS(推荐mtk3329或者UBLOX LEA-6H/NEO6M,其他nmea GPS无法识别,需要改动代码)3.5路以上的遥控系统,推荐6通以上4.数传遥测系统,推荐xbee pro900,3D RADIO或者空中速率可以达到57600的数传5.载机(直升机固定翼多旋翼车或船)首次安装雷迅科技 雷迅科技 雷迅科技 根据上图了解好飞控的接线定义,当然,不一定马上都要把飞控连接线都插好,前期我们只需要把接收机接上APM ,连接上USB 到电脑把飞控功能熟悉好,再进行装机安装APM 2的USB 驱动程序首先我们要下载MissionPlanner地面站程序,并完成安装后,就会自动安装好驱动,如果你没有安装软件的话,插上APM 会无法找到驱动的,就会如下面显示的一样但是实际会找不到驱动,我们从WIKI 上面找到MissionPlanner/p/ardupilot-mega/downloads/版本号越大越新,下载一个最新的即可MissionPlanner-X.X.X.msi如果是XP 用户,请先安装 Framework v3.5,百度一下即可找到下载地址安装过程不再讲述,很简单,均是下一步,下一步的操作打开后的界面雷迅科技 从左到右功能如下遥测数据–任务规划–参数设置–模拟器–固件升级–CLI 命令窗口–帮助和升级软件下载你需要的载机固件请先把APM 用usb 连接到电脑,并确认驱动已经安装成功(设备管理器可以看到这样的端口)然后打开地面站选择firmware 固件雷迅科技 在地面站右上方选择好端口,在下拉框,很容易就可以识别哪个是apm 端口,apm 的端口会以COM **Arduino mega 2560显示不需要点CONNECT直接选好串口号即可,请注意然后根据自己的飞行器硬件选择对应的图标即可下载最新的固件如是固定翼,就点即可提示是否确定升级固件点YES,提示是否APM2+硬件,点YES ,如果出厂前的固件与你烧录的固件不同,也会提示是否擦除eepROM 之类提示,也点YES等大概2分钟,几次进度条完成后,会提示左下角,新版本可能会提示一个确认对话框雷迅科技 1.如果你是从一个以前的版本更新固件,请确认你的参数对这个版本都是准确的2.请确认你的加速计在更新固件后已经校准或已重新校准按OK ,完成烧录LED 指示说明LED:行为:Power通电时亮TX指示数据从USB/FTDI 口输入RX指示数据向USB/FTDI 口输出A C陀螺仪校准时快速闪烁,然后暂停,然后循环闪烁(总共约45秒)B闪烁=正在校准.常亮=可以起飞CGPS 锁定-C 在等待GPS 锁定时闪烁;锁定后常亮。
APM32F030x6 x8 数据手册说明书

数据手册DatasheetAPM32F030x6/x8基于Arm® Cortex®-M0+ 内核的32位微控制器版本:V1.1产品特性⏹系统与架构32位Arm® Cortex®-M0+内核最高48MHz工作频率⏹存储器闪存:32~64KBSRAM:4~8KB⏹时钟、复位与电源管理外部供电电压:V DD=2.0~3.6V模拟供电电压:V DDA=V DD~3.6V上电/掉电复位(POR/PDR)4~32MHz晶体振荡器带校准的32KHz RTC振荡器内部40 KHz RC振荡器⏹低功耗模式睡眠、停机、待机⏹高达55个快速I/O引脚支持所有可映射的外部中断向量几乎所有I/O引脚可兼容5V输入⏹5通道DMA控制器⏹12位ADC最多支持16个外部通道转换范围:0~3.6V独立模拟电源:2.4~3.6V⏹实时时钟RTC支持日历功能在停机待机模式下可用于警报和周期唤醒⏹10个定时器1个可提供7通道PWM输出的16位的高级控制定时器多达5个通用16位定时器1个16位基本定时器独立看门狗和系统窗口看门狗定时器系统滴答定时器⏹通信接口最多2个I2C接口最多2个USART接口最多2个SPI接口⏹CRC计算单元⏹串行线调试(SWD)⏹96位唯一UID目录产品特性 (1)简介 (5)功能描述 (6)系统框图 (7)内核 (8)存储器 (8)地址映射 (9)电源管理 (10)3.5.1供电方案 (10)3.5.2电压调压器 (10)3.5.3供电监控器 (10)时钟树 (12)时钟和启动 (13)实时时钟(RTC) (13)启动模式 (13)CRC计算单元 (13)中断控制器 (14)3.11.1嵌套向量中断控制器(NVIC) (14)3.11.2外部中断/事件控制器(EINT) (14)DMA (14)定时器 (14)系统滴答定时器 (16)通信接口 (16)3.15.1I2C总线 (16)3.15.2通用同步/异步收发器(USART) (17)3.15.3串行外设接口(SPI) (17)通用输入输出接口(GPIO) (18)ADC(模拟/数字转换器) (18)3.17.1温度传感器 (18)3.17.2内部参考电压(V REFINT) (19)3.17.3串行线调试端口(SW-DP) (19)引脚特性 (20)引脚功能描述 (22)电气特性 (29)测试条件 (29)5.1.1最大值和最小值 (29)5.1.2典型值 (29)5.1.3典型曲线 (29)5.1.4负载电容 (29)绝对最大额定值 (30)5.2.1最大额定电压特性 (30)5.2.2最大静电特性 (31)5.2.3静态栓锁 (31)5.2.4最大温度特性 (31)通用工作条件下的测试 (31)5.3.1内嵌复位和电源控制模块特性测试 (32)5.3.2内置参考电压特性测试 (32)5.3.3功耗 (33)5.3.4外部时钟源特性 (35)5.3.5内部时钟源特性 (36)5.3.6低功耗模式唤醒时间 (37)5.3.7PLL特性 (37)5.3.8存储器特性 (37)5.3.9I/O端口特性 (38)5.3.10NRST引脚特性 (40)5.3.11通信接口 (40)5.3.1212位ADC特性 (43)封装信息 (44)LQFP64封装信息 (44)LQFP48封装信息 (47)LQFP32封装信息 (50)QFN32封装信息 (52)订货信息 (55)包装信息 (57)带装包装 (57)常用功能模块命名 (60)修订历史 (61)简介APM32F030x6/x8系列芯片是基于Arm® Cortex®-M0+内核的32位高性能微控制器,工作频率可达48MHz。
APM中文使用手册Word版
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
apmsw400h说明书
apmsw400h说明书APMSW400H是一款高性能的电子产品,具有多种功能和特点。
本文将详细介绍APMSW400H的功能、使用方法以及注意事项,以帮助用户更好地了解和使用该产品。
APMSW400H是一款智能插座,可以通过手机APP远程控制插座开关。
用户只需在手机上下载对应的APP,并连接上APMSW400H,即可通过手机远程控制插座的开关状态。
这一功能使用户无需亲自操作插座,便能随时随地控制家中的电器开关,提高了生活的便利性。
除了远程控制功能,APMSW400H还具有定时开关功能。
用户可以根据自己的需求,在手机APP上设置插座的定时开关时间。
例如,用户可以在上班前将电视机的插座定时关闭,避免长时间待机造成的能源浪费。
而在下班回家前,又可以通过手机远程控制插座打开电视机,使其在到家后立即开启,提供更好的使用体验。
APMSW400H还具有电能监测功能。
用户可以通过手机APP实时监测插座所连接设备的用电情况,了解电器的实际功耗和使用情况。
这一功能可以帮助用户合理使用电器,节约能源,降低用电成本。
在使用APMSW400H时,需要注意以下几点。
首先,用户需确保插座连接正常,避免接触不良导致的电器故障。
其次,用户需注意插座的额定功率,不得超过其所能承受的最大功率,以免引发火灾等安全事故。
此外,用户在设置定时开关功能时,需确保时间设置正确,避免错过开关时间或不必要的开关操作。
APMSW400H是一款功能强大、方便实用的智能插座。
通过远程控制、定时开关和电能监测等功能,用户可以更加便捷地管理家中的电器使用,提高生活的舒适度和能源利用效率。
然而,在使用过程中,用户仍需注意安全使用,并根据实际需求合理设置插座功能,以获得最佳的使用体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
具体安装接线参照本手册附件中的接线图,安装中需要注意以下几点:1、APM 飞控为5V 供电,最高不要超过5.5V。
APM 板上有两片0.5A 自恢复保险,这两片保险只对USB 接口、电调接口和PM 电流电源传感器接口输入的5V 电源有效,为有效保护APM 主板,请尽量使用这三个接口供电,使用电调接口和PM 接口供电还具有反接保护功能,所以推荐你使用带UBEC 的电调或者带UBEC 输出的电流电压传感器进行供电,使用这两处接口供电,你需要将板上标记JP1 的排针用一个2.0 跳线帽插上,否则将不能供电;关于电调并联供电的问题:因APM 的电调输出口正极端都是并连的,所以多个带UBEC 输出电调都插上的话存在输出并联的情况,如果电调使用的是开关型稳压模块,那么建议只用一个电调的UBEC 输出对APM 供电,其它电调的正极线用挑针从3P 杜邦头中挑出,而使用线性稳压模式的电调可以并联,不需要挑线。
辨别是否是开关型还是线性UBEC 有个比较简单的法则:一般标注支持2-3S 的电调都是线性UBEC,可以直接并联;而4S 及4S 以上的电调,如果带UBEC 输出,一般是开关型UBEC,因为4S 电池14.8V 以上电压要降压到5V 输出,如果使用线性稳压模块,那么稳压模块自身的发热将会非常大,无法提供大电流输出;2、通过USB 接口供电时,如果USB 数据处于连接状态,APM 会切断数传接口的通讯功能,所以请不要同时使用数传和USB 线连接调试APM,USB 接口的优先级高于数传接口,仅有供电功能的USB 线不在此限;3、APM 板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM 主板;4、APM 板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。
另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。
七、使用建议对于初次使用APM 自驾仪的用户来说,建议你分步骤完成APM 的入门使用:1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;2、仅连接USB 线学会固件的下载;3、连接接收机和USB 线完成APM 的遥控校准、加速度校准和罗盘校准;4、完成各类参数的设定;5、组装飞机,完成各类安全检查后试飞;6、PID 参数调整;7、APM 各类高阶应用。
八、地面站调试软件Mission Planner 安装首先,Mission Planner的安装运行需要微软的Net Framework 4.0 组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0 并安装,官方下载地址为/zh-cn/download/confirmation.aspx?id=17718安装完Net Framework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载:/Tools/MissionPlanner/,下载页面中每个版本都提供了MSI版和ZIP版可供选择。
MSI为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB线即可使用。
ZIP 版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。
具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。
以安装MSI 版为例(注意:安装前请不要连接APM 的USB 线),双击下载后的MSI 文件,然后一步一步Next 即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装接着勾选始终信任……然后点击安装,安装程序会自动安装相关的驱动程序安装完Mission Planner 后,安装程序一般不会在桌面创建一个快捷方式,所以请自行打开安装目录,选择ArdupilotMegaPlanner10 文件右键,选择发送一个快捷方式到桌面上,以方便日后使用。
特别提醒:有些精简版GHOST 系统和64 位WIN7 系统因缺少相关文件会提示驱动不成功,本手册包提供了相关的补丁文件,请查看本手册包中关于无法安装驱动的解决办法,打上补丁后再重新检索安装驱动程序,驱动是否成功安装的标志就是在设备管理器中正确识别了标识为Arduino Mega 2560 的端口号。
九、认识Misson Planner 的界面安装完Mission Planner 和驱动后,现在可以开始启动Misson Planner 主程序了,启动后首先呈现的是一个多功能飞行数据仪表界面。
新版Misson Planner 已将大部分菜单汉化,非常贴合国情。
主界面左上方为八个主菜单按钮,飞行数据实时显示飞行姿态与数据;飞行计划是任务规划菜单;初始设置用于固件的安装与升级以及一些基本设置;配置调试包含了详尽的PID 调节,参数调整等菜单;模拟是给APM 刷入特定的模拟器固件后,将APM 作为一个模拟器在电脑上模拟飞行使用;终端是一个类似DOS 环境的命令行调试窗口,功能非常强大。
主界面右上方是端口选择、波特率以及连接/断开按钮(connect/disconnect),具体使用后续有相关说明。
十、固件安装APM 拿到手后首先要做的就是给它刷入你自己需要的固件,虽然卖家在销售前可能会帮你刷入固件,但是未必是符合你要求的固件,所以学会刷新APM 的固件是你的必修课之一。
固件安装前请先连接APM 的USB 线到电脑(其它的可不用连接),确保电脑已经识别到APM 的COM 口号后,打开Mission Planner(以下简称MP),在MP 主界面的右上方端口选择下拉框那里选择对应的COM 口,一般正确识别的COM 口都有Arduino Mega 2560 标识,直接选择带这个标识的COM 口,然后波特率选择115200,注意:请不要点击connect 连接按钮,固件安装过程中程序会自行连接。
如果你之前已经连接了APM,那么请点击Disconnect 断开连接,否则固件安装过程中弹出错误提示另外请注意:请不要用无线数传安装固件,虽然无线数传跟USB 有着同样的通信功能,但它缺少reset 信号,无法在刷固件的过程中给2560 复位,会导致安装失败。
接下去点击Install setup(初始设置),MP 提供了两种方式升级安装固件,一种是Install Firmware 手动模式,另外一种是Wizard 向导模式,Wizard 向导模式会一步一步的以对话方式提示你选择你对应的飞控板、飞行模式等参数,虽然比较人性化,但是有个弊端,向导模式会在安装过程中检索你的端口,如果检索后端口后,因电脑性能的差异,端口没有有效释放的话,后续的固件烧入会提示不成功,所以使用向导模式升级安装固件的话出错概率比较大,建议你使用Install Firmware 手动模式安装。
点击Install Firmware,窗口右侧会自动从网络下载最新的固件并以图形化显示固件名称以及固件对应的飞机模式,你只需要在对应你飞机模式的图片上点击,MP 就会自动从网络上下载该固件,然后自动完成连接APM——写入程序——校验程序——断开连接等一系列动作,完全无需人工干预。
如果你想使用一个历史版本的固件,那么请点击右下角Beta firmware pick previous Firmware 处,点击后会出现一个下拉框,你只要在下拉框里选择你自己需要的固件就行了。