SCARA型装配机器人系统设计
一种基于SCARA机器人机械结构设计
一种基于SCARA机器人机械结构设计1.引言SCARA是一种广泛应用于组装、包装和材料搬运等领域的工业机器人。
它的机械结构采用四条约束自由度,能够实现平面内的三个自由度运动,具有精准定位和高重复精度的特点。
本文将针对SCARA机器人的机械结构进行设计和优化。
2.设计目标(1)实现精准定位:SCARA机器人需要能够准确地定位和操作目标物体,因此机械结构设计要具有足够的刚度和精度。
(2)高重复精度:SCARA机器人通常用于重复性高的工作,要求机械结构设计能够精确重复运动。
(3)简洁合理:机械结构设计要尽量简洁,以减少成本和维护难度。
(1)运动平台:SCARA机器人的运动平台通常采用平行四边形结构,能够实现水平平移和垂直运动。
运动平台需要具有足够的刚度和精度,通常采用铝合金材料制作,表面进行硬质阳极氧化处理以增加硬度和耐腐蚀性。
(2)臂部结构:SCARA机器人的臂部结构由两条平行的支撑臂组成,支撑臂之间通过一个转动关节连接。
转动关节需要具备足够的承载能力和刚度,通常使用精密轴承。
支撑臂的长度需要根据工作需求进行合理设计,过长的臂部会降低机器人的刚度和精度。
(3)手腕结构:SCARA机器人的手腕结构为一个转动关节,用于实现末端执行器的旋转操作。
手腕结构需要具备足够的承载能力和刚度,通常使用精密轴承。
同时,手腕结构需要足够灵活,以方便对目标物体进行操作。
4.结构优化为了进一步提高SCARA机器人的性能,可以对机械结构进行优化。
优化的目标包括降低结构重量、提高刚度和精度、增加载荷能力等。
(1)结构轻量化:可以采用轻质材料替代部分结构件,例如碳纤维复合材料,以降低结构重量,提高机械自由度的加速度和速度。
(2)增加刚度:可以通过加大结构截面尺寸,增加结构件数量等方式增加机械结构的刚度,以降低机械结构的振动和变形,提高定位精度。
(3)优化传动系统:可以对机械传动系统进行优化,例如采用精密减速机、滚珠丝杠等,以提高传动效率和精度。
scara机器人结构原理

scara机器人结构原理小伙伴们!今天咱们来唠唠SCARA机器人,这可是个超有趣的家伙呢!SCARA机器人啊,它的全名是Selective Compliance Assembly Robot Arm,也就是选择性柔顺装配机器人手臂。
你看这名字,就感觉它很有个性吧。
咱们先从它的外观结构说起。
SCARA机器人长得有点像一个机械手臂,有几个关节连接着不同的部分。
它的基座就像是它的大脚丫,稳稳地站在那里,这个基座可重要啦,它要给整个机器人提供支撑,就像我们人站在地上一样踏实。
然后是它的手臂部分。
它的手臂一般有两个关节,这两个关节就像是我们手臂的肘关节和肩关节一样,可以灵活地转动。
这两个关节的设计很巧妙哦,它们让机器人的手臂可以在平面内做各种动作。
比如说,它可以快速地伸出去,就像你伸手去拿远处的东西一样,而且还能很精准地定位。
这种精准度可不得了,就像一个神射手,每次都能准确地击中目标。
再说说它的末端执行器。
这就相当于机器人的手啦。
这个“手”可以根据不同的任务换上不同的工具,比如说,如果要做装配工作,就可以装上一个小夹子,像小镊子一样,把那些小零件稳稳地夹起来,然后准确地放到该放的地方。
如果是要做搬运工作呢,这个“手”可能就变成一个小吸盘,就像章鱼的触手一样,把东西吸起来搬走。
那SCARA机器人为什么能这么灵活地运动呢?这就涉及到它的原理啦。
它的关节里面有电机,电机就像是机器人的小肌肉,给关节提供动力,让关节可以转动。
而且这些电机的控制可精确啦,就像一个很有耐心的老师傅,一点点地调整关节的角度。
在它的关节处还有一些传感器呢。
这些传感器就像是机器人的小眼睛和小耳朵,它们可以感知到手臂的位置、速度还有受力情况。
比如说,当机器人的手臂快要碰到什么东西的时候,传感器就会告诉机器人:“前面有东西啦,小心点!”这样机器人就可以及时调整自己的动作,避免碰撞。
SCARA机器人在很多地方都发挥着大作用呢。
在工厂里,它可是个装配小能手。
SCARA工业机器人设计计算说明书

SCARA工业设计计算说明书SCARA工业设计计算说明书1、引言这个文档旨在提供关于SCARA(Selective Compliance Assembly Robot Arm)工业的设计和计算的详细说明。
本文档将涵盖的设计原理、运动学计算、动力学计算、控制系统、安全性考虑以及其他相关内容。
2、设计原理2.1 结构设计在设计SCARA工业时,需要考虑的结构类型和材料选择。
此章节将详细描述SCARA的结构设计原理和相关参数。
2.2 运动学原理SCARA的运动学是学中重要的一部分。
此章节将详细讲解运动学原理,包括正逆运动学计算、坐标系选择以及关节角度计算等。
3、运动学计算3.1 正逆运动学计算本章节将介绍SCARA的正逆运动学计算方法及其实际应用。
详细讲解的坐标变换、关节角度计算和工具路径规划等内容。
3.2 轨迹规划在SCARA的应用中,轨迹规划是一个关键的部分。
本章节将介绍常见的轨迹规划算法,并讨论其适用性和实施方法。
4、动力学计算4.1 驱动系统驱动系统是SCARA的核心组成部分之一。
本章节将详细讨论驱动系统的设计和计算,包括电机选择、减速器设计和动力学参数计算等。
4.2 动力学模型动力学模型是的关键组成部分之一。
本章节将介绍SCARA的动力学模型,并详细讨论重要的动力学参数计算和应用方法。
5、控制系统控制系统是SCARA实现精准控制和运动的关键。
本章节将介绍常见的控制系统设计原则和方法,包括PID控制、运动控制算法和通信接口设计等。
6、安全性考虑为了保证SCARA的安全性和人机合作能力,在设计过程中需要考虑相关的安全性因素。
本章节将详细讨论安全性设计原则和相关的安全性机制。
7、其他相关内容本章节将包括SCARA的应用领域、未来发展趋势、经济性评估以及其他相关内容。
附件:本文档涉及的附件包括示意图、计算表格和相关参考资料等。
法律名词及注释:1、SCARA:Selective Compliance Assembly Robot Arm,选择性顺应性装配手臂。
SCARA机器人装配及结构设计
SCARA机器人装配及结构设计一、SCARA机器人的结构设计1.底座:SCARA机器人的底座是机器人的支撑结构,通常由坚固的金属材料制成,以确保机器人的稳定性和刚性。
2.铰链臂:SCARA机器人的铰链臂由几个关节连接而成,可以实现自由度的运动。
通常,它由两个旋转关节和一个平移关节组成。
旋转关节负责机器人的水平旋转运动,而平移关节负责机器人的垂直运动。
3.终端执行器:SCARA机器人的终端执行器通常是机器人手臂的工作部分,用于进行装配和包装等操作。
根据不同的应用需求,终端执行器可以是夹子、吸盘或工具握持器等。
4.控制系统:SCARA机器人的控制系统通常由电脑和控制器组成,用于控制机器人的运动。
控制系统可以根据预设的程序和传感器反馈的信息来进行调整和控制。
二、SCARA机器人的装配过程1.连接底座:首先,将机器人的底座与工作平台或其他支撑结构连接,确保机器人的稳定性和安全性。
2.安装铰链臂:将机器人的铰链臂插入底座上的旋转关节,并用螺丝固定。
确保旋转关节可以自由旋转,但又不会摇晃或松动。
3.安装平移关节:将机器人的平移关节连接到铰链臂的末端,并用螺丝固定。
确保平移关节可以平稳地移动,但又不会滑动或卡住。
4.安装终端执行器:根据不同的应用需求,选择适当的终端执行器,并将其连接到机器人的平移关节上。
确保终端执行器可以牢固地固定在平移关节上,并具有良好的操作性能。
5.连接控制系统:将机器人的控制系统与电脑和控制器连接,确保机器人可以接收和执行指令。
同时,连接必要的传感器和开关,以确保机器人的安全性和操作性能。
6.校准和测试:完成机器人的装配后,进行校准和测试。
校准包括机器人的零点位置校准、关节运动范围校准等。
测试包括机器人的运动测试、负载测试、精度测试等。
通过校准和测试,确保机器人能够正常工作并达到预期的性能。
总结:SCARA机器人是一种常见的装配机器人,其结构设计和装配过程需要注意机器人的稳定性、可靠性和操作性能。
基于运动控制器的SCARA机器人及控制系统设计
1绪论1.1 SCARA机器人的现状、发展SCARA(平面关节型)机器人是一种精密型装配机器人,在水平方向具有顺应性,在垂直方向具有很大的刚性,具有速度快、精度高、柔性好等特点,采用伺服电机驱动,可应用于电子、机械和轻工业等有关产品的自动装配、搬运、调试等工作。
迄今为止,SCARA机器人仍被认为是自动加工生产中不可或缺的元素。
在各种自动机械手臂的选择中,SCARA是被广泛认可的。
由于它的速度、成本效率、可靠性和在工作过程中的小轨迹,使它在很多的工作中仍然是最好的机器人,比如:分配、装载、包装、安放以及装配和码跺等。
近年来,其有效载重能力的提高,对智能系统地整合以及末端感应器种类的增加等因素都很好的扩展了SCARA机器人的应用。
但是,对于机器人的控制大部分仍是以嵌入式单片机为核心的 ,其运算速度和处理能力远不能满足机器人控制系统飞速发展的需要 ,日益成为阻碍机器人技术进步的瓶颈。
随着以电子计算机和数字电子技术为代表的现代高技术的不断发展 ,尤其是高速度数字信号处理器DSP(Digital Signal Processor)的出现 ,从根本上解决了嵌入式系统运算能力不足的问题 ,并为机器人运动控制系统的改进提供了新的途径。
该设计正是从这一点出发 , 选用控制能力很强的DSP芯片作为机器人控制器的主处理器 ,设计出一套功能强大、使用方便的机器人运动控制系统 ,从根本上解决了单片机带来的各种问题。
1.2 运动控制器的现状、发展目前,国内外的运动控制器大致可以分为3类:(1)以单片机或微处理器作为核心的运动控制器。
这类运动控制器速度较慢,精度不高,成本相对较低。
在一些只需要低速点位运动控制和对轨迹要求不高的轮廓运动控制场合应用。
(2)以专用芯片(ASIC)作为核心处理器的运动控制器。
这类运动控制器结构比较简单,但这类运动控制器大多数只能输出脉冲信号,工作于开环控制方式。
这类控制器对单轴的点位控制场合是基本满足要求的,但对于要求多轴协调运动和高速轨迹插补控制的设备,这类运动控制器不能满足要求。
SCARA机器人的设计及运动、动力学的研究

例如,对于需要承受较大载荷的关节或连杆,可以选择高强度轻质材料如铝合 金或钛合金等;对于需要较高耐磨性的部分如转动副,可以选择耐磨钢或硬质 合金等材料。此外,还需要考虑材料的加工工艺性和成本等因素。
4、尺度设计:尺度设计是SCARA机器人结构设计的重要环节之一。应该根据 实际应用需求和工作空间限制来确定机器人的总体尺寸和各连杆的长度、角度 等参数。同时需要注意保持机器人整体结构的协调性和美观性。
21、惯性张量:惯性张量是描述机器人惯性特性的重要参数,包括绕三个轴的 旋转惯量和质量分布等信息。惯性张量的准确计算和控制对于实现SCARA机器 人的稳定运动和精确定位具有重要意义。
211、动力传递:动力传递是SCARA机器人运动的重要环节。通过合理的动力 传递路径和机构设计,可以实现机器人各关节的协调运动,提高机器人的整体 性能和精度。同时,还需要考虑驱动器的选择和优化,以提高机器人的动力输 出和效率。
结论与展望
本次演示对SCARA机器人的设计及运动、动力学特性进行了深入研究,取得了 一定的研究成果。首先,我们介绍了SCARA机器人的设计及运动原理,为后续 研究提供了理论基础。其次,我们对机器人进行了动力学分析,明确了质量、 刚度、阻尼等参数对机器人性能的影响。在此基础上,我们探讨了机器人的运 动控制策略,实现了对机器人精确定位和稳定控制。最后,通过实验研究验证 了机器人的性能。
动力学分析
SCARA机器人的动力学特性是影响其性能的重要因素之一。质量、刚度和阻尼 是决定机器人动态性能的关键参数。在建立动力学模型时,需考虑机器人各关 节的质量分布、驱动力矩等因素,以便更准确地预测机器人的动态行为。通过 对SCARA机器人进行动力学分析,可以有效地优化其结构参数和控制策略,提 高机器人的稳定性和精度。
scara工业机器人课程设计
scara工业机器人课程设计一、课程目标知识目标:1. 学生能够理解SCARA工业机器人的基本结构、原理及功能。
2. 学生能够掌握SCARA工业机器人的运动学及动力学相关知识。
3. 学生能够了解SCARA工业机器人在工业生产中的应用及发展趋势。
技能目标:1. 学生能够运用CAD软件绘制SCARA工业机器人的三维模型。
2. 学生能够编写简单的程序,实现对SCARA工业机器人的控制。
3. 学生能够运用相关工具和仪器对SCARA工业机器人进行调试和维护。
情感态度价值观目标:1. 培养学生对工业机器人技术的兴趣,激发学生的创新精神和探索欲望。
2. 增强学生的团队合作意识,培养学生在团队中沟通、协作的能力。
3. 提高学生对我国工业机器人产业的认知,培养学生的国家荣誉感和使命感。
课程性质:本课程为实践性较强的学科课程,结合理论教学和实际操作,培养学生的动手能力和实际应用能力。
学生特点:高二年级学生对工业机器人有一定的基础知识,具备一定的自主学习能力和动手操作能力。
教学要求:教师需注重理论与实践相结合,充分调动学生的主观能动性,提高学生的实际操作技能和创新能力。
通过课程学习,使学生达到预定的学习成果,为我国工业机器人产业发展储备优秀人才。
二、教学内容1. SCARA工业机器人的基本结构及原理- 机器人概述、分类及发展历程- SCARA工业机器人的结构组成、工作原理2. SCARA工业机器人的运动学及动力学- 运动学分析:正运动学、逆运动学- 动力学分析:静力学、动力学建模3. SCARA工业机器人的编程与控制- 编程基础:编程语言、编程方法- 控制系统:硬件组成、软件实现4. SCARA工业机器人的应用及发展趋势- 工业应用场景:搬运、装配、焊接等- 发展趋势:智能化、网络化、协同化5. 实践操作- CAD软件绘制SCARA工业机器人三维模型- 编写程序,实现SCARA工业机器人的基本控制- 调试与维护:故障排查、性能优化教学内容安排和进度:第一周:介绍工业机器人概述、分类及发展历程,学习SCARA工业机器人的基本结构及原理第二周:学习SCARA工业机器人的运动学及动力学知识第三周:学习SCARA工业机器人的编程与控制方法第四周:了解SCARA工业机器人的应用及发展趋势,进行实践操作教材章节关联:《工业机器人技术》第三章:工业机器人运动学及动力学第四章:工业机器人编程与控制第五章:工业机器人应用及发展趋势三、教学方法本课程将采用以下多样化的教学方法,以激发学生的学习兴趣和主动性:1. 讲授法:- 用于讲解SCARA工业机器人的基本概念、原理、运动学及动力学知识。
SCARA机器人毕业设计

执行器:负责执行机器人的动作,如电 机、液压缸等
通信系统:用于控制器与传感器、执行 器之间的信息传输
软件系统:用于控制机器人的运动和操 作,如控制算法、人机界面等
PID控制算法:实现简单, 稳定性好,但参数调整困难
控制算法选择:PID控制算法、 模糊控制算法、神经网络控制 算法等
,a click to unlimited possibilities
汇报人:
CONTENTS
PART ONE
PART TWO
SCARA机器人是一种四轴机器人,具有四个自由度 主要用于装配、搬运、焊接等工业自动化领域 具有高精度、高速度、高稳定性等特点 广泛应用于电子、汽车、食品等行业
模糊控制算法:实现简单, 适应性强,但稳定性较差
神经网络控制算法:实现复杂, 但具有自学习、自适应能力, 稳定性好
控制器:PLC或DSP 传感器:光电、力觉、位置等 执行器:伺服电机、气动、液压等 通信接口:RS232、RS485、CAN等 电源:直流或交流 安全保护装置:急停按钮、安全门等
软件架构:模 块化设计,易 于维护和扩展
的性能表现
结果分析:分 析实验结果, 找出影响性能 的因素,提出
改进措施
性能指标:速度、 精度、稳定性、 可靠性等
测试方法:模拟 实际应用场景, 进行性能测试
评估结果:分析 测试数据,得出 性能评估结果
优化建议:根据评估 结果,提出优化建议, 如改进机械结构、优 化控制算法等
汇报人:
正运动学:描述机器人末端执行器在关节空间中的运动 正运动学方程:描述机器人末端执行器在关节空间中的位置和姿态 正运动学求解:通过正运动学方程求解机器人末端执行器的位置和姿态 正运动学应用:在机器人控制、路径规划、运动规划等领域有广泛应用
SCARA机器人运动控制系统设计

SCARA机器人运动控制系统设计嘿,咱们来聊聊 SCARA 机器人的运动控制系统设计!这可真是个超级有趣又充满挑战的事儿。
我记得有一次,在一个工厂的生产线上,看到了正在忙碌工作的SCARA 机器人。
它那灵活的手臂,精准的动作,让我瞬间就被吸引住了。
就在那时候,我心里想着,如果能深入了解它背后的运动控制系统设计,那该多酷啊!SCARA 机器人的运动控制系统,就像是它的大脑和神经中枢,指挥着它的一举一动。
咱们先来说说硬件部分。
这可少不了高性能的控制器,就像一个聪明的指挥官,得有强大的运算能力和快速的响应速度,才能应对各种复杂的指令。
传感器也是关键,好比机器人的眼睛和耳朵,能实时感知周围的环境和自身的状态。
电机呢,那就是机器人的肌肉,提供强大的动力。
再说说软件方面。
编程可是重中之重,就像给机器人制定规则和策略。
得用清晰、简洁的代码,告诉机器人啥时候动、怎么动、动多快。
算法也不能少,比如路径规划算法,要让机器人能以最优的路径完成任务,不浪费一丝一毫的能量和时间。
在设计这个运动控制系统的时候,还得考虑各种实际情况。
比如说,不同的工作场景对精度的要求可不一样。
要是在电子厂组装微小的零件,那精度要求就超高,一点儿误差都不能有。
要是搬运一些大件物品,可能对精度的要求就没那么苛刻,但对速度和力量的要求就会提高。
还有啊,稳定性也特别重要。
总不能让机器人工作着工作着突然出故障吧,那可就麻烦大了。
所以在设计的时候,得进行大量的测试和优化,确保系统在各种情况下都能稳定运行。
另外,人机交互界面也不能忽视。
得让操作人员能方便、直观地控制机器人,就像玩手机一样简单易懂。
要是界面复杂难懂,操作起来麻烦,那可就大大降低了工作效率。
总的来说,SCARA 机器人运动控制系统的设计是一个综合性的大工程。
需要我们综合考虑硬件、软件、实际应用场景等多个方面,每一个细节都不能马虎。
就像盖房子一样,每一块砖都要砌好,才能建成坚固又漂亮的大厦。
就像我当初在工厂看到的那个 SCARA 机器人,它之所以能高效、精准地工作,背后离不开精心设计的运动控制系统。
基于运动控制器的SCARA机器人及控制系统设计

基于运动控制器的SCARA机器人及控制系统设计首先,我们需要明确机器人控制系统的设计目标。
一个好的控制系统应该具备以下几个方面的要求:1.精准性:机器人应该具备高精度的定位能力,能够准确地执行任务。
2.速度:机器人应该能够快速地完成任务,提高生产效率。
3.稳定性:机器人应该具备稳定性,能够在各种工作环境下保持正常运行。
4.可靠性:控制系统应该具备高可靠性,能够长时间稳定运行。
基于上述要求,我们可以设计出以下的SCARA机器人控制系统:1.机械结构设计:根据任务需求和工作环境,设计出符合要求的机械结构。
机械结构包括机械臂、关节和其它机械部件,应该具备稳定性和高精度。
2.传感器选择:选择合适的传感器来检测机器人的位置和姿态。
常见的传感器包括编码器、逆向运动学传感器和力传感器。
这些传感器可以提供机器人当前位置和姿态的准确信息,从而实现机器人的控制和定位。
3.运动控制器选择:选择高性能的运动控制器来控制机器人的运动。
运动控制器可以接收传感器的反馈信息,并根据任务需求生成相应的控制信号,控制机械臂的运动。
同时,运动控制器还应具备实时性和高精度的特点,以确保机器人的运动控制精度和稳定性。
4.控制算法设计:根据机器人的结构和任务需求,设计出适合的控制算法。
常用的控制算法包括PID控制算法、模糊控制算法和遗传算法等。
这些算法可以根据机器人当前位置和姿态的变化来调整机器人的运动,实现精准的控制。
综上所述,基于运动控制器的SCARA机器人及控制系统设计需要考虑机械结构设计、传感器选择、运动控制器选择、控制算法设计和人机交互界面设计等方面的内容。
通过合理的设计和选择,可以实现机器人运动的精准性、速度和稳定性。
基于视觉引导的SCARA机器人自动装配系统
t e m .T h e ma c h i n e v i s i o n s y s t e m i s d e s i g n e d t o r e a l i z e t h e f u n c t i o n o f r a p i d i d e n t i i f c a t i o n ,l o c a t i o n a n d a t t i t u d e d e t e mi r n a t i o n o f t h e a t r i f a c t s .T h e a s s e mb l y s y s t e m i s d e s i g n e d t o a c h i e v e t h e f u n c t i o n o f p r e c i s i o n g r a s p i n g a n d p l a c e me n t o f t h e a r t i f a c t s .T h e i ma g e
关 键 词 :机 器 视 觉 ; S C A R A; 装 配 系统 ; S o c k e t 通 信
中 图 分 类 号 :T P 2 4 2 . 2 文 献 标 识 码 :A DOl : 1 0 . 1 6 1 5 7 / j . i s s n . 0 2 5 8 - 7 9 9 8 . 2 0 1 7 . 0 5 . 0 0 4
A p p l i c a t i o n o f E l e c t r o n i c T e c h n i q u e , 2 0 1 7, 4 3 ( 5 ) : 2 1 - 2 4 .
S CARA a u t o ma t i c a s s e mb l y s y s t e m b e d
SCARA机器人装配及结构设计

SCARA机器人装配及结构设计摘要Scara 机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。
由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。
整个系统由机器手,机器臂,关节,步进电机驱动系统等组成。
通过各自由度步进电机的驱动,完成机器手,机器臂的位置变化。
具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,步进电机的选择等。
在校核满足其结构强度的基础上,我们对scara 机器人的结构进行优化设计。
本论文着重研究scara 机器人的结构设计和运动学分析。
在论文开始首先介绍了机器人的发展及其分类情况。
在论文第二,三章具体叙述了scara 机器人的结构设计和运动学分析的详细过程。
在论文末尾还对scara 机器人进一步改进措施和应用展望进行了阐述。
关键词:scara 机器人,步进电机,结构设计,机器臂Structure Design of SCARA Assembly ManipulatorAbstractA SCARA robot is a robot of plane and joint composed of three degrees of freedo m. Its mostly function is used to complete transition and motion of exact apparatus es and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric-ware indust ry and exact mechanism. The whole system is composed of manipulator hand, ma nipulator arm, joints and stepper motor driving system. By stepper motor’s driving o f each degree of freedom, it completes location change of manipulator hand and m anipulator arm. The idiographic designing content is designing of in-phase tooth-sha pe strap, designing of silk-bar nut, designing of shell and axis and the choice of st epper motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of SCARA robots.This paper put its emphases on research of its structure designing and kinematics analysis. At the beginning of this paper, it introduces the development and sort of r obots. In the second and third chapter, it introduces detailed detail among the proc essing of the structure designing of a SCARA robot and its kinematics analysis. At the last, this paper gives some measures about improving of SCARA robots, and gives a expectation about its future.Key Words: SCARA robots, stepper motor, structure design, manipulator arm目录Abstract ii第一章绪论 11.1 机器人的特点 11.2 机器人的构成及分类 11.2.1 机器人的构成 11.2.2 机器人的分类 31.3 机器人的应用与发展 41.3.1 机器人的应用 41.4SCARA机器人的研究意义 61.4.1SCARA机器人的研究意义 61.4.2SCARA机器人的特点71.5本文的研究内容8第二章SCARA机器人结构设计92.1 SCARA机器人传动方案的比较及确定9 2.2 各自由度步进电机的选择112.2.1 第一自由度步进电机的选择122.2.2 第二自由度步进电机的选择: 122.2.3 第三自由度步进电机的选择132.3 同步齿形带传动设计142.4 丝杠螺母设计182.4.1 丝杠耐磨性计算182.4.2 丝杠稳定性计算192.4.3 丝杠刚度计算192.4.4 丝杠和螺母螺纹牙强度计算202.4.5 螺纹副自锁条件校核212.5各输出轴的设计212.5.1 机身输出轴设计212.5.2 大臂输出轴设计222.5.3 带轮轴设计: 222.5.4 升降轴设计222.6壳体设计23第三章SCARA机器人运动学分析253.1 引言253.2SCARA机器人正运动学分析253.2.1SCARA机器人连杆坐标系的建立25 3.2.2SCARA机器人正运动学问题273.3 SCARA机器人逆运动学分析293.4 本章小结31第四章总结与展望32参考文献33致谢341.1 机器人的特点机器人最显著的特点有以下几个:1.可编程。
SCARA机器人结构设计与动力学分析

基于上述动力学特性分析的结果,可以进一步进行SCARA机器人的结构设计。
SCARA机器人结构设计
SCARA机器人的结构设计应该根据实际应用需求和动力学特性进行优化,以 提高机器人的性能和精度。以下是一些关键的结构设计要素:
1、机构运动副:机构运动副是连接各连杆和关节的要素,直接影响机器人 的运动精度和稳定性。应该选择低摩擦、高精度和高耐用的运动副类型,如球面 副、平面副等,以保证机器人的运动精度和长期稳定性。
5、防震设计:在机器人结构设计中,防震设计也是非常重要的一环。可以 通过在关节或连杆中加入阻尼器、优化结构设计等方法来减小机器人的震动和提 高其稳定性。
6、人机交互设计:在SCARA机器人结构设计中,还需要考虑人机交互的问题。 可以通过在末端执行器上安装安全装置、设置可视化界面等方式来提高机器人的 安全性和易用性,使机器人更加方便快捷地完成各种任务。
SCARA机器人结构设计与动力 学分析
引言
SCARA(Selective Compliance Assembly Robot Arm)机器人是一种常见 的工业机器人,因其具有良好的空间运动能力和高精度定位而被广泛应用于电子 装配、玩具制造、医药包装等领域。SCARA机器人的结构与动力学分析是提高其 性能和精度的重要基础。本次演示将详细介绍SCARA机器人的结构,分析其动力 学特性,并进行结构设计。
21、惯性张量:惯性张量是描述机器人惯性特性的重要参数,包括绕三个轴 的旋转惯量和质量分布等信息。惯性张量的准确计算和控制对于实现SCARA机器 人的稳定运动和精确定位具有重要意义。
211、动力传递:动力传递是SCARA机器人运动的重要环节。通过合理的动力 传递路径和机构设计,可以实现机器人各关节的协调运动,提高机器人的整体性 能和精度。同时,还需要考虑驱动器的选择和优化,以提高机器人的动力输出和 效率。
SCARA工业机器人设计
SCARA工业机器人设计Scara是一种四自由度机器人,用来处理需要水平和垂直运动的任务。
它是一个广泛应用于工业生产线的机器人,具有高精度和高稳定性的特点。
本文将重点介绍SCARA工业机器人的设计。
首先,SCARA机器人由基座、纵臂、横臂和末端执行器组成。
基座是机器人的固定部分,提供了机器人的稳定性和支撑。
纵臂连接在基座上,并可实现竖直方向的运动。
横臂连接在纵臂上,并可实现水平方向的运动。
末端执行器则连接在横臂上,用来完成具体的操作任务。
其次,SCARA机器人的设计需要考虑的因素很多。
首先是机器人的精度要求。
由于SCARA机器人广泛应用于装配和加工领域,因此精度是一个非常重要的考虑因素。
在机器人的设计过程中,需要选择合适的驱动系统和传感器来保证机器人的精度。
其次是机器人的工作范围。
SCARA机器人的工作范围决定了它能够处理的具体任务。
在设计过程中,需要根据实际需求来确定机器人的工作范围,并选择合适的机械结构和控制系统来实现。
此外,机器人的稳定性也是一个重要考虑因素。
特别是在高速运动或负重任务中,机器人的稳定性对于保证机器人的正常工作非常重要。
在设计过程中,需要选择合适的结构和材料来提高机器人的稳定性。
最后,SCARA机器人的设计还需要考虑机器人的控制系统。
机器人的控制系统决定了机器人能够完成的任务和运动方式。
在设计过程中,需要选择合适的控制系统和编程工具来实现机器人的自动化操作。
综上所述,SCARA工业机器人的设计需要考虑精度、工作范围、稳定性和控制系统等多个因素。
在设计过程中,需要综合考虑这些因素,并选择合适的驱动系统、传感器、机械结构和控制系统来实现机器人的设计需求。
随着工业自动化的不断发展,SCARA工业机器人将会在更多领域发挥重要作用。
SCARA机器人的单自由度结构设计
摘要工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个工业用SCARA机器人。
SCARA机器人很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。
它是一种工业机器人,具有三个自由度。
其中,两个旋转自由度,另外一个是移动自由度。
它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化设计方法设计了SCARA机器人的机械结构。
采用SolidWorks 和AutoCAD完成了机器人本体的三维模型和二维图设计。
关键字:SCARA;机器人;自由度AbstractThe industrial robot is a most typical mechatronic digital equipment,high value-added technology,a wide range of applications,support for advanced manufacturing technology and information society,new industries,and social development of future production will play a more and more important role.In this paper,the design of SCARA robot with an industry. The SCARA robot is very similar to human arm movement,which includes the shoulder elbow and wrist joints to achieve horizontal and vertical movement. It is a kind of industrial robots,has three degrees of freedom. Among them,two rotational degrees of freedom,the other is a translational degrees of freedom. It can achieve planar motion,with the flexibility,the whole arm in the vertical stiffness,in a horizontal direction of large flexibility,widely used in assembly operations.In this paper,using modular design method to design the mechanical structure of robot SCARA. Using SolidWorks and AutoCAD to complete the 3D model and 2D drawing design of the robot body.Keywords:SCARA;robot;degree of freedom目录摘要 (I)Abstract (II)目录.............................................................................................................................. I II 第一章绪论.. (1)1.1引言 (1)1.2 国内外机器人领域研究现状及发展趋势 (1)1.3 SCARA机器人简介 (2)1.4项目的主要研究内容 (4)1.4.1项目研究的主要内容、技术方案及其意义 (4)1.4.2拟解决的关键问题 (4)第二章SCARA机器人的机械结构设计 (6)2.1 SCARA机器人的总体设计 (6)2.2 SCARA机器人的总体设计 (7)2.2.1机器人本体的设计原则 (7)2.2.2机器人本体的模块化设计 (7)2.2.3三维CAD技术与机器人本体建模 (8)2.3 SCARA机器人驱动方案 (9)2.3.1机器人的驱动方式 (9)2.3.2控制电机的类型、特点 (9)2.4 升降关节设计 (10)2.5 同步带选型设计与计算................................................ 错误!未定义书签。
SCARA机器人运动控制系统设计
SCARA机器人运动控制系统设计在SCARA机器人的运动控制系统中,需要考虑以下几个方面:一、运动学模型设计:运动学模型是机器人运动规划和控制的基础。
在SCARA机器人的运动学模型设计中,需要确定机器人的关节角度、位置和速度之间的关系。
通过正、逆运动学计算,可以确定机器人末端执行器的目标位置和姿态,并将其转化为关节角度和速度的控制命令。
二、控制算法设计:控制算法是实现SCARA机器人精确控制的关键。
常用的控制算法包括PID控制、模糊控制、自适应扰动补偿等。
在SCARA机器人的控制系统设计中,需要选择合适的控制算法,并进行参数调整和优化,以满足机器人在各种工作场景下的要求。
三、传感器选择与安装:传感器在机器人运动控制系统中起着至关重要的作用,可以提供关键的位置、力量和速度信息。
常用的传感器包括编码器、力力传感器和视觉传感器等。
根据不同的应用场景,需要选择合适的传感器,并将其正确安装在机器人的关键部位,以提高运动控制的精度和稳定性。
四、人机交互界面设计:人机交互界面是SCARA机器人运动控制系统的重要组成部分。
通过人机交互界面,操作人员可以实时监测机器人的运动状态、设置运动参数、进行故障诊断和维护等操作。
在人机交互界面设计中,需要考虑界面的友好性、操作的简便性和信息的直观性,以提高操作人员的工作效率和机器人的安全性。
综上所述,SCARA机器人的运动控制系统设计需要考虑运动学模型设计、控制算法设计、传感器选择与安装和人机交互界面设计等方面的要素。
通过综合考虑这些方面,可以设计出稳定、高效和可靠的SCARA机器人运动控制系统,满足各种工业生产和自动化装配的需求。
SCARA机械手系统设计与规划控制研究
2、任务规划
任务规划是指如何将一系列操作步骤进行合理的组合与安排,以实现特定的 生产任务。针对SCARA机械手系统的特点,本次演示提出了一种基于优先队列的 任务规划算法。该算法将操作任务按照优先级进行排序,并依次执行,以提高生 产效率。同时,为了解决任务执行过程中的冲突和碰撞问题,引入了动态避障策 略,通过实时感知环境信息调整任务执行路径。
SCARA机械手系统设计与规划控制 研究
目录
01 SCARA机械手系统设 计
03 结论
02
SCARA机械手系统规 划控制
随着制造业的飞速发展,自动化和智能化成为生产过程中的重要需求。作为 自动化生产的重要设备,SCARA(Selective Compliance Assembly Robot Arm) 机械手系统在实现高精度、高速度和高效率的生产中发挥着至关重要的作用。本 次演示将围绕SCARA机械手系统的设计与规划控制进行深入探讨,旨在提高机械 手系统的性能和适应性,推动其在工业领域更广泛的应用。
在过去的几十年中,SCARA机械手系统已经引起了广泛的和研究。然而,现 有的研究大多集中在机构设计、运动学和动力学分析等方面,而对于系统的规划 控制研究尚不完善。因此,本次演示将重点SCARA机械手系统的规划控制方法, 以期为相关领域的研究提供有益的参考。
SCARA机械手系统设计
1、机器人结构
3、传感器
为了提高机械手系统的感知能力和适应性,需要配备多种传感器,如视觉传 感器、触觉传感器和力传感器等。这些传感器可以实时获取环境信息,并反馈给 控制系统,从而调整机器人的运动状态,确保抓取和操作物体的稳定性和准确性。
通过建立数学模型和仿真实验,对SCARA机械手系统进行了全面的分析和验 证。实验结果表明,所设计的机械手系统具有良好的运动性能和抓取精度,能够 适应多种生产环境的需求。
四轴SCARA机器人机械结构的毕业设计
详细设计、
2013.4月中旬
5
中期考核
2013.4月中旬
6
设计的细化和完善
2013.5月上中旬
7
打印论文图纸、准备毕业答辩
2013.5月下旬
8
毕业答
课题来源: 教学 科研 生产 其它
发出任务书日期:
指导教师签名:
年 月 日
教研室意见:
教研室主任签名:
年 月 日
学生签名:
2、完成毕业论文,要求正文字数不少于2万字,严格按照“本科生毕业论文(设计)撰写规范”撰写。
3、完成文献综述及英文文献的翻译工作。
毕业设计(论文)进度安排:
序号
毕业设计(论文)各阶段内容
时间安排
备注
1
课题理解、文献调研
2013.1月-2月
2
开题报告
2013.3月初
3
方案设计、实验预研
2013.3月上旬
本科毕业设计(论文)任务书
学生姓名
班级
专业
机械设计制造及其自动化
导师姓名
职称
单位
毕业设计(论文)题目
四轴SCARA机器人机械结构的设计
毕业设计(论文)主要内容和要求:
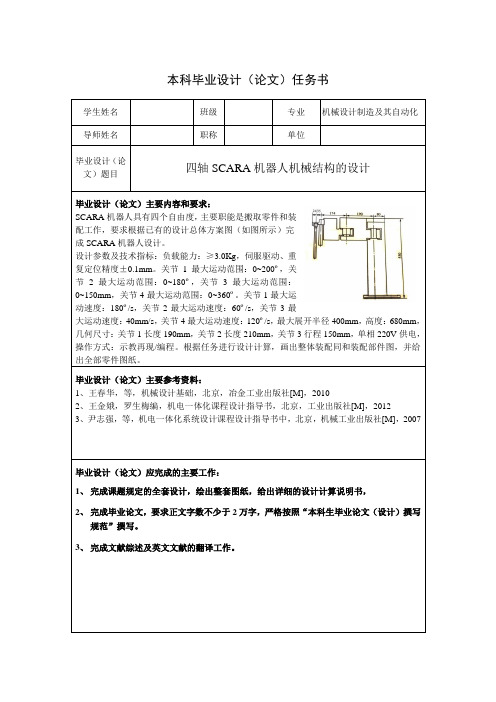
SCARA机器人具有四个自由度,主要职能是搬取零件和装配工作,要求根据已有的设计总体方案图(如图所示)完成SCARA机器人设计。
设计参数及技术指标:负载能力:≥3.0Kg,伺服驱动、重复定位精度±0.1mm。关节1最大运动范围:0~200º,关节2最大运动范围:0~180º,关节3最大运动范围:0~150mm,关节4最大运动范围:0~360º。关节1最大运动速度:180º/s,关节2最大运动速度:60º/s,关节3最大运动速度:40mm/s,关节4最大运动速度:120º/s,最大展开半径400mm,高度:680mm,几何尺寸:关节1长度190mm,关节2长度210mm,关节3行程150mm,单相220V供电,操作方式:示教再现/编程。根据任务进行设计计算,画出整体装配同和装配部件图,并给出全部零件图纸。
SCARA机器人装配及结构设计

SCARA机器人装配及结构设计一、引言随着自动化和智能制造的快速发展,机器人技术在许多领域得到了广泛应用。
其中,SCARA(Selective Compliance Assembly Robot Arm)机器人是一种常见的装配机器人,具有高精度、高速度和高灵活性等优点。
本文将探讨SCARA机器人的装配及结构设计。
二、SCARA机器人装配1、准备工作在开始装配之前,需要做好以下准备工作:1、检查零件的完整性,确保所有零部件都已准备就绪。
2、清理工作表面,确保工作表面干净整洁。
3、准备好工具和设备,例如螺丝刀、扳手、电动工具等。
2、装配流程SCARA机器人的装配流程如下:1、将基座安装在工作台上,并固定好。
2、将电机安装在基座上,并连接好电源线和信号线。
3、安装丝杆、齿轮、轴承等传动部件,确保传动部件的精度和稳定性。
4、安装手臂和夹具,确保手臂的灵活性和夹具的牢固性。
5、调试机器人的运动轨迹和速度,确保机器人的运动符合设计要求。
三、SCARA机器人结构设计1、基座设计基座是SCARA机器人的基础,需要承受整个机器人的重量和负载。
因此,基座设计需要考虑到强度、刚度和稳定性等因素。
常用的基座材料包括铸铁、钢板和铝合金等。
2、电机设计电机是SCARA机器人的核心部件之一,需要提供足够的扭矩和精度。
因此,电机设计需要考虑到功率、速度和精度等因素。
常用的电机类型包括伺服电机、步进电机和直流电机等。
3、传动部件设计传动部件包括丝杆、齿轮和轴承等,需要确保传动部件的精度和稳定性。
因此,传动部件设计需要考虑到传动比、摩擦系数和耐磨性等因素。
常用的传动部件材料包括不锈钢、合金钢和塑料等。
4、手臂和夹具设计手臂是SCARA机器人的工作部分,需要具备高灵活性和高精度等特点。
夹具是用来固定工件的,需要确保夹具的牢固性和精度。
因此,手臂和夹具设计需要考虑到结构、材料和加工工艺等因素。
常用的手臂和夹具材料包括铝合金、不锈钢和合金钢等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3、 SCARA 机器人结构设计 ............................................................................ 34 3.1. SCARA 机器人结构组成......................................................................... 34 3.2. 基座设计 ............................................................................................... 35 3.3. 旋转臂设计............................................................................................ 36 3.4. 大臂设计 ............................................................................................... 37 3.5. 小臂设计 ............................................................................................... 38 3.6. 末端升降旋转设计 ................................................................................ 38 3.7. 末端机械手设计 .................................................................................... 39
毕业设计
A SCARA robot is a robot of plane and joint composed of three degrees of freedom. It's mostly function is used to complete transition and motion of exact apparatuses and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, homeused electricware industry and exact mechanism. The whole system is composed of manipulator hand, manipulator arm, joints and servo motor driving system. By servo motor’s driving of each degree of freedom, it completes location change of manipulator hand and manipulator arm. The idiographic designing content is designing of inphase toothshape strap, designing of silkbar nut, designing of shell and axis and the choice of servo motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of SCARA robots. This paper put its emphases on research of its structure designing and kinematics analysis. At the beginning of this paper, it introduces the development and sort of robots. It introduces detailed detail among the processing of the structure designing of a SCARA robot and its kinematics analysis. At the last, this paper gives some measures about improving of SCARA robots, and gives a expectation about its future.
5、 总结与展望 ............................................................................................... 47 6、 参 考 文 献 ............................................................................................. 48 7、 致 谢................................................................................................... 49
本论文着重研究 SCARA 机器人的结构设计系统设计。在论文开 始首先介绍了机器人的发展及其分类情况。具体叙述了 SCARA 机器 人的结构设计详细过程。在论文末尾还对 SCARA 机器人进一步改进 措施和应用展望进行了阐述。
关键词:SCARA 机器人,伺服电机,结构设计,机器臂
1
上海电机学院
ABSTRACT
2、 SCARA 机器人传动方案 ............................................................................ 13 2.1. SCARA 机器人传动方案的比较及确定 ................................................. 13 2.1.1. 可行方案分析.............................................................................. 13 2.1.2. 方案对比和分析.......................................................................... 14 2.1.3. 最终驱动方案.............................................................................. 15 2.2. 伺服电机的优点和选型 ........................................................................ 16 2.2.1. 伺服电机的优点.......................................................................... 16 2.2.2. 伺服电机的选型.......................................................................... 17 2.3. 同步带轮选型设计 ................................................................................ 17 2.3.1. 同步带传动的优点 ...................................................................... 17 2.3.2. 同步带轮选型参数 ...................................................................... 18
上海电机学院
毕业设计
上海电机学院 毕业设计
课题名称 学院 RA 型装配机器人系统设计 机械学院
机械电子工程
BJ08 0910020708
123
2013 年 xx 月 xx 日
上海电机学院
摘要
毕业设计
SCARA 机器人是一种由四个自由度组成的平面关节型机器人, 它的主要作用是可以完成精密仪器和物体的搬运和移动。由于体积 小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机 械业等领域。整个系统由机器手,机器臂,关节,伺服电机驱动系统 等组成。通过各自由度伺服电机的驱动,完成机器手,机器臂的位置 变化。具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输 出轴和壳体的设计,伺服电机的选择等。在校核满足其结构强度的基 础上,我们对 SCARA 机器人的结构进行优化设计。