三轴机械手系统使用手册
HCS三轴机械手控制系统说明书V

4.3.3 教导程序............................................................................................................................... 24
3 运行模式................................................................................................................................................4
3.2.1 轴的手动操作......................................................................................................................... 5 3.2.2 夹具的手动操作..................................................................................................................... 6 3............................................................................................ 6 3.2.3 辅助设备的手动操作............................................................................................................. 7 3.2.4 预留动作的手动操作............................................................................................................. 8 3.3 自动运行........................................................................................................................................10 3.3.1 自动运行数据的监视........................................................................................................... 10 3.3.2 自动运行时参数的修改........................................................................................................11 3.3.3 单步运行................................................................................................................................11 3.3.4 自动运行时速度的调节........................................................................................................11
三轴点胶机控制系统说明书

输入 驱动器
胶枪1 胶枪2 胶枪3 胶枪4
输 出1 输 出2 输 出3 输 出4
:接 至 枪 通 道 控 制1 ,低 电 平 输 出 方 式 :接 至 枪 通 道 控 制2 ,低 电 平 输 出 方 式 :接 至 枪 通 道 控 制3 ,低 电 平 输 出 方 式 :接 至 枪 通 道 控 制4 ,低 电 平 输 出 方 式
:外 部 输 入2 :外 部 输 入3 :外 部 输 入4
脉 冲1 方 向1 脉 冲2 方 向2 脉 冲3 脉 冲3
:接 至X轴 驱 动 器 脉 冲-端, +端 接+ 5V :接 至X轴 驱 动 器 方 向-端, +端 接+ 5V :接 至Y轴 驱 动 器 脉 冲-端, +端 接+ 5V :接 至Y轴 驱 动 器 方 向-端, +端 接+ 5V :接 至Z轴 驱 动 器 脉 冲-端, +端 接+ 5V :接 至Z轴 驱 动 器 脉 冲-端, +端 接+ 5V
43
GND
4 4 +5V输出
第 5 页 共 37 页
2.2 控制器接线说明
接线说明
输 入1 输 入2 输 入3 输 入4 输 入5 输 入6 输 入7 输 入8 输 入9 输 入1 0 输 入1 1 输 入1 2
:接 至X轴 原 点 传 感 器 :接 至Y轴 原 点 传 感 器 :接 至Z轴 原 点 传 感 器 :保 留 使 用 :保 留 使 用 :接 至"启 动/暂 停"按 钮 :接 至"暂 停"按 钮 :接 至"复 位/急 停"按 钮 :外 部 输 入1
第 2 页 共 37 页
1.产品介绍
3轴控制器使用手册
三轴运动控制器操作手册目录一与外部驱动器及IO(输入输出)接线图 (4)二用户管理操作 (5)三系统参数设置 (6)四IO(输入输出)设置 (8)五系统自检操作 (10)六手动操作 (12)七编程操作 (14)八自动执行 (16)九指令详解 (18)十电子齿轮计算及公式 (20)十一编程案例 (23)十二常见问题及处理 (28)一与外部驱动器及IO(输入输出)接线图1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)2.IO(外接开关及继电器)的接线图(红色线为1号线)注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。
用户密码出厂值为“123456”。
用户登录成功后,则可进行加工参数的修改保存。
否则加工参数不可修改保存。
然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。
若需要修改,再次进入用户管理进行登录。
注:用户密码可以修改。
但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。
共分5屏,按“上页”“下页”键切换。
控制参数修改完毕可进入速度参数界面进行速度的参数修改,共3屏,修改方式同上。
修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。
若保存成功则提示“参数保存成功”。
注:加工过程中禁止进行参数保存。
按空格键,可将当前参数值清零。
当设定的速度值小于启动速度时,则速度值为启动速度。
当启动速度值设为0时,默认为控制器的最小极限速度。
四IO(输入输出)设置从主界面的参数设置里进入IO设置,对外部输入及输出进行定义,共5屏。
IAS-3操作说明书V1.0

目录一、 操作面板--------------------------------------------2二、 触摸屏操作------------------------------------------2三、 报警、状态提示极其处理------------------------------12四、 其他画面-------------------------------------------13五、 电气原理图-----------------------------------------17前言:此版本为IAS-3系列三轴机械手的操作说明,IAS-3三轴机械手为天通吉成机器技术有限公司自主开发的经济型机械手,主要用于配套我公司生产的粉末成型机,实现自动取件、自动质检、产品归类、自动排列、自动换舟皿,并反馈产品质量情况,实现粉末成型机在线自动调整功能。
该产品主要部件伺服定位电缸全部采用标准型整体式电缸,防尘性能优良,采购知名品牌(SMC)电缸,质量保证,相对市场同类产品具有美观大方,可靠性好,配套性强、经济实用、操作简便直观等特点。
一、 操作面板启动按钮:机械手完成原点回归准备就绪后,按启动则机械手开始自动运行。
停止按钮:按下后机械手系统自动停止至安全位置。
复位按钮:消除报警。
急停按钮:按下后整机停机,通过旋转复位。
触摸屏:集中了操作IAS机械手自动排坯系统的主要操作,在第二部分详细说明。
二、 触摸屏操作1)开机画面在此界面按任意位置切换到主菜单画面2)主菜单画面触摸屏窗口切换的主菜单,可通过按【运行监视画面】等按键分别切换至对应视窗口,同时在分窗口分别设有主菜单按钮,可返回次画面。
3)运行监视画面主要作为自动运行时查看生产情况,随时掌握产量与设备良品率等情况。
按钮说明:主菜单:返回主菜单画面(注:以此类推,后面画面不再说明)。
点位校准:进入点位校准画面。
取件计数:显示总共拾取产品数量,包含良品与不良品。
三轴中文说明书

三轴驱动板说明书感谢您选择我们公司的产品,为您更好更快的使用数控产品,请您阅读本手册特点:Features1:最高3.5A步进电机驱动电流,4档可调。
2:最高16细分,精度更高,运行更平稳。
3:过载过流过温自动保护功能,充分保护您的电脑与周边设备4: 双极性恒流斩波驱动,电机低速无爬行现象,噪音小,无共振区。
5:全封闭光电隔离,双级信号处理,充分保护你的电脑及设备。
6: 2路输出控制,可扩展第五轴或控制2路外部设备。
7: 四路输入控制,可设置限位,急停,分中,对刀等。
电气性能(环境温度Tj=25℃时):输入电源12 - 36V直流电源供电输出电流3A(峰值3.5A)驱动方式双极恒流PWM驱动输出。
驱动电机42,57,86步进电机,2相-4相(4线6线8线步进电机)重量约300克。
细分设定表:信号波形和时序动力输出接口功能接口标示明细图在试机前请注意以下事项1,试机时先以12V电压试机,42步进请用12-16V/DC电源,57步进请选用16-24V/DC电源,86步进选24-36V/DC电源2,确定步进马达的功率和电流(型号)3,确定步进马达的接线二》各引脚定义1》并口控制定义如下:PIN9 PIN14 PIN7 PIN1 PIN2 PIN3 PIN8 PIN6 PIN4 PIN5 PIN16 PIN17主轴电机X允许X方向X脉冲Y允许Y方向Y脉冲Z允许Z方向Z脉冲输出1输出22》手控1~PIN15定义如下(按图片右上为P1左上P15)P1 P2 P3 P4 P5 P6 P7 P8 P15 P14 P13 P12 P11 P10 P9 X X主X Y Z Z Z Y Z Y Y急GN5V/脉冲使能轴方向使能方向脉冲使能限位限位方向脉冲停 D VDD3》限位1~PIN9定义如下(按图片右上为P1左上P9)X轴限位Y轴限位Z轴限位急停输入1 输入2 输入3 输入4对应并口P10 对应并口P11 对应并口P12 对应并口P134》输出接口定义(以图片上为1下为17)P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17正地XA+ XA- XB+XB- YA+YA- YB+YB- ZA+ZA- ZB+ ZB- MO/V+GNDMO-电源请接12~36V 8A(可根据步进电机工作电流选配)以上开关电源,接到图上标明电源输入的接口。
三轴机床操作教程
返回
主页面
实例操作视频
%,MX--, G53 Z-2 S16000 M3 G71 G0 G90 G17 G51 E0.01 G04K500 G54 X-30.5 Y-30.5 Z15. Z5. G1 Z-.25 F300. Y30.5 F3000. X-26.5 Y-26.5 Y26.5 X26.5 G0 Z15. G53Z-5 G53X-5Y-5 G55 X-30.5 Y-30.5 Z15. Z5. G1 Z-.25 F300. Y30.5 F3000. X-26.5 Y-26.5 Y26.5 X26.5 G0 Z15. M05 M09 G53Z-5 G53X-5Y-5 M30 %,MX--,
检验原点
主页面
用户菜单:角点设定
方法一:先启动主轴 主菜单(MAIN MENU) F4(手动) F2(SETUP) 如下图顺序操作 X轴 退出
预置X “ 0” 确定
原点位 置
F5(用户)
Y轴
退出
预置Y “ 0” 确定
向工件方 向移半径
向工件方 向移半径
按下 M66、 M77
按下 M88、 M99
返回
按下F6(M56)输入当前位定完M56后 执行 退出(ESC) 进入F4(MDI)
输入G54 不一致重设 一致 执行
查看当前的Z值与设定值是否一致
再进入F4(MDI) 输入XY
将主轴提高
查看当前的位值与显示值是否一致 停主轴
不一致重设 完成退出 一致
返回
F5(用户) 输入转速
F4(MDI) 按下执行
主页面
关闭主轴
方法一:
主菜单(MAIN MENU) F4(SP CONTROL) F4(手动) F2(M05) F5(用户) 退出(ESC)
机械手中文操作说明书
台灣三菱電機機器手臂中文操作說明書目錄1.操作面板功能…………………………………………………………..2.教導盒各鍵功能表………………………………………………………3.教導盒功能………………………………………………………………4.自動運轉操作4.1.動作速度設定………………………………………………………..4.2.程式號碼選擇………………………………………………………..4.3.程式運轉開始………………………………………………………..4.4.程式運轉停止………………………………………………………..4.5.程式運轉停止後再開始……………………………………………4.6.程式重新開始……………………………………………………….5.教導何功能解說5.1.程式編輯…………………………………………………………….5.2.運轉5.2.1.伺服驅動器………………………………………………….5.2.2.檢查………………………………………………………….5.3.程式管理5.3.1.程式一覽顯示……………………………………………….5.3.2.程式複製…………………………………………………….5.3.3.程式名稱更改……………………………………………….5.3.4.程式刪除…………………………………………………….5.4.監控5.4.1. 入力訊號……………………………………………………..5.4.2. 出力訊號……………………………………………………..5.4.3. 變數…………………………………………………………..5.4.4. 錯誤紀錄……………………………………………………..5.4.5. CC-LINK入出力資料5.5.維護5.5.1. 參數…………………………………………………………..5.5.2. 初始化………………………………………………………..5.5.3. 煞車釋放……………………………………………………..5.5.4. 原點設定……………………………………………………..5.5.5. 電源…………………………………………………………..5.6.設定5.6.1. 時間………………………………………………………….. 附錄(錯誤一覽表)…………………………………………………………..操作面板功能控制器操作面板的各部名稱1)開始鍵…………….執行程式使ROBOT動作。
机械手控制系统操作手册
HC-S3机械手控制系统操作手册1 系统配置及安装1.1 基本配置1、8寸真彩触摸屏2、三轴伺服控制板3、I/O板4、电源部分(2个电源供应器)5、通讯线1.2 系统的安装1、配线作业必须由专业电工进行。
2、确认电源断开后才能开始作业。
3、请安装于金属等阻燃物上并远离可燃物。
4、使用时必须安全接地。
5、外部电源发生异常,控制系统会发生故障,为使整个系统安全工作,请务必在控制系统的外部设置安全电路。
6、安装、配线、运行、维护前,必须熟悉本说明书内容;使用时也必须熟知相关机械、电子常识及一切有关安全注意事项。
7、安装控制器的电箱,应具备通风良好、防油、防尘的条件。
若电控箱为密闭式则易使控制器温度过高,影响正常工作,须安装抽风扇,电箱内适宜温度为50℃以下,不要使用在结露及冰冻的地方。
8、控制器安装应尽量避免与接触器、变压器等交流配件布置过近,避免不必要的突波干扰。
注意:处理不当可能会引起危险,包括人身伤害或设备事故等。
2 操作面板2.1 外观及说明按键区域速度调节旋转编码开关状态灯选择开关急停开关轴动作键页面切换2.2 主画面及轴定义2.2.1 主画面说明2.2.2 机械手轴定义Z 轴:机械手的横入、横出轴。
X1轴:机械手主臂的前进、后退轴。
Y1轴:机械手主臂的上升、下降轴。
X2轴:机械手副臂的前进、后退轴。
Y2轴:机械手副臂的上升、下降轴。
C 轴:机械手治具水平、垂直轴。
B 轴:机械手治具旋转轴。
用户权限当前模具当前轴位置报警信息状态栏3 运行模式机械手有手动、停止、自动三种运行状态,将状态选择开关旋至左边档位为手动状态,在该状态下可对机械手进行手动操作;将状态选择开关旋至中间档位为停止状态,在该状态下机械手停止所有动作,只可对机械手进行原点复归操作。
将状态选择开关旋至右边档位,并按一次“启动”键,机械手即进入自动运行状态。
3.1 原点复归为了使机械手能够正确的自动运行,每次打开电源后,必须在停止状态下进行原点复归动作。
机械手操作手册

机械手操作手册介绍本操作手册旨在提供机械手的操作指南和相关安全注意事项。
了解并遵守本手册中的操作规定,将有助于确保机械手的安全和正常运行。
操作步骤以下是机械手的基本操作步骤:1. 打开电源:在使用机械手之前,请确保已连接电源,并将电源开关置于"ON"位置。
2. 启动机械手:通过按下启动按钮或使用遥控器启动机械手。
请确保机械手处于稳定的平台上,以避免不必要的震动和移动。
3. 设置工作模式:根据具体任务需求,选择合适的工作模式。
常见的模式包括自动模式和手动模式。
4. 设置工作参数:根据具体任务需求,设置机械手的工作参数,如速度、力度等。
请务必参考机械手的技术手册以确保正确设置参数。
5. 执行任务:通过机械手的操作界面或遥控器,执行特定的任务。
根据任务的复杂程度和特征,可能需要使用特定的工具或附件。
6. 停止机械手:完成任务后,请按下停止按钮或使用遥控器停止机械手的运行。
安全注意事项在操作机械手时,请遵守以下安全注意事项:1. 穿戴个人防护装备:在操作机械手时,请佩戴适当的个人防护装备,如安全帽、安全鞋和手套。
2. 注意机械手周围的安全区域:确保机械手周围没有其他人员或障碍物。
此外,需要标示出机械手的作业区域,以保证其他人员的安全。
3. 注意机械手的负载能力:在执行任务前,请确保机械手的负载不超过其额定能力。
超负荷操作可能导致机械手损坏或事故发生。
4. 遵守机械手操作规程:请严格按照机械手的操作规程进行操作。
不要擅自修改或调整机械手的工作参数,除非经过授权。
5. 不要将手部或其他物体靠近机械手:在机械手运行时,不要将手部或其他物体靠近它的活动部件。
避免意外夹伤或其他伤害。
故障排除在机械手使用过程中,可能会遇到一些故障或问题。
以下是常见问题和相应的解决方法:1. 机械手无法启动:检查电源连接是否正确,确保电源开关处于"ON"位置。
2. 机械手运行缓慢:检查工作参数是否正确设置,可能需要增加速度或减少负载。
HY-TB3CNC三轴机器说明书
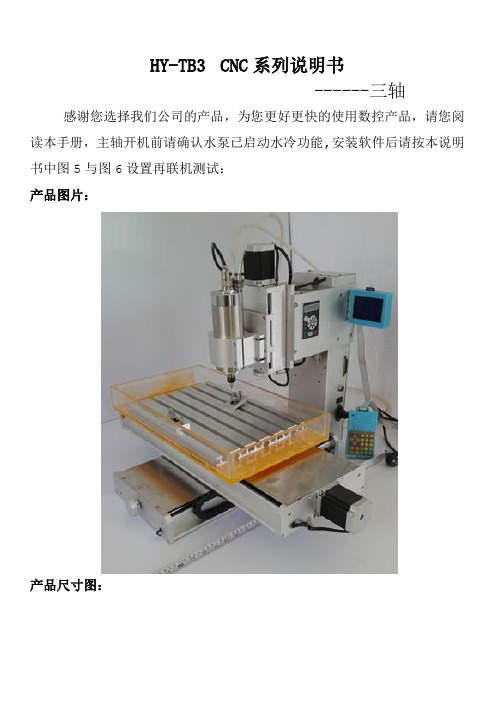
HY-TB3 CNC系列说明书------三轴感谢您选择我们公司的产品,为您更好更快的使用数控产品,请您阅读本手册,主轴开机前请确认水泵已启动水冷功能,安装软件后请按本说明书中图5与图6设置再联机测试:产品图片:产品尺寸图:产品参数:1:产品外观尺寸高580*长699*宽610(MM)2:有效行程300*400*(150)(MM)3:1605精密滚珠丝杆4:XY导轨为直径20加硬镀铬轴.Z轴导轨为直径16加硬镀铬轴5:XYZ3轴57*78步进250 OZ/IN(2.2N/CM)6:重复定位精度0.01mm,加工精度0.02MM7:加工速度0-4000MM/分8:X轴工作台最大负载50KG,80四轴夹头最大负载30KG50四轴夹头最大负载15KG,五轴工作台最大负载15KG。
9:不锈钢后档板10:集成24V350W开关电源11:800W水冷变频工业主轴12:1500W工业主轴变频器13:4轴专业驱动板,配液晶数显与手柄,可脱机手动编程与路径记录脱机重复加工14:可升级4轴与5轴信号波形和时序操作说明:1:按手柄ST按键进入下级设置菜单,设置完成按OK键返回主工作介面2:按手柄CL按键四轴相应轴清0,按B1换下一行,按OK键退出清0 3:四轴实时记录电脑运行坐标与手动移动坐标,显示值为电脑运行数据+手动移动数据===================================================1:为确保对刀精准性,对刀前需核对提刀高度的参数与刀具直径是否设置正确,2:需确认对刀仪接线与限位开关接线状态是否正常。
3:确认OK后按B2键进入自动对刀操作,完成后自动停止。
====================================================1:按手柄ST按键再进入下级设置菜单,设置完成按OK键返回主介面2:按手柄B1按键移下行设置,3:按手柄B2按键相应反白设置处功能选择4:按手柄数字按键输入设置数字参数1:在显示REC状态中按B2键启动电脑运行数据记录,同时会显示记录的段数,最大记录1800段,再按B2键停止。
三轴伺服机械手使用说明书 V2.00
三轴伺服机械手控制系统使用说明书前言本系统在出厂前已经过严格检查。
五六轴伺服机械手控制系统购入后,请检查本系统是否因运输不慎而造成损伤;产品的规格、型号是否与订购产品的机种相符;有无合格标志等。
如有问题,请与本公司或供应商联系。
本系统安装须注意以下几个事项:●外部电源发生异常,控制系统会发生故障,为了整个系统安全工作,请务必在控制系统外部设置安全电路。
●安装、配线、运行、维护前,必须熟悉本说明书内容;使用时也必须熟悉相关的机械、电子常识及一切有关安全的注意事项。
●请安装与金属等阻燃物上并远离可燃物。
●配线作业必须由专业电工进行。
●确认电源断开后才能开始作业。
●使用环境温度为0~50℃,不要使用在结露及冰冻的地方目录前言 (2)1.基本配置 (5)2.主要技术参数 (5)3.操作面板说明 (6)3.1.外观及说明 (6)3.2.主界面及轴的定义 (7)4.运行模式 (8)4.2.手动操作说明 (9)4.2.1.按键操作说明 (9)4.2.2.手动输入操作说明 (10)4.2.3.手轮操作说明 (14)4.3.自动操作说明 (15)4.3.1.自动运行数据监控 (15)4.3.2.自动运行参数修改 (16)5.功能设定说明 (17)5.1.1.信号设定说明 (18)5.1.2.时间参数说明 (20)5.1.3.运行参数说明 (21)5.1.4.安全设置说明 (21)5.1.5.设备参数说明 (23)5.1.6.产品设定说明 (24)5.1.7.堆叠设置说明 (25)5.1.8.系统设置说明 (27)5.1.9.文件管理说明 (28)5.1.10.维护说明 (29)6.IO实时状态说明 (30)7.告警列表说明 (30)8.教导操作说明 (31)8.1.教导文件操作 (31)8.2.程序教导 (32)8.2.1.伺服动作教导 (32)8.2.2.气动动作教导 (33)8.2.3.夹具抱具教导 (34)8.2.4.吸盘动作教导 (35)8.2.5.联机信号 (35)8.2.6.辅助设备 (36)8.2.7.等待信号 (37)8.2.8.分段信号 (38)8.2.9.模座跟踪 (38)8.3.帮助说明 (38)9.系统软件升级 (38)9.3.升级 (41)10.调试说明 (42)11.安装与接线 (42)附录1 (48)概述本系统为五六轴伺服机械手控制系统装载,支持机械手用到的各种指令动作;支持单直线,两轴直线、三轴直线及两轴圆弧等运动;支持对各个轴,输入输出点进行程式编程;采用了先进的分段式控制,可实现对每个轴的独立控制,特别适应于快速多轴的流水线;也可以实现多轴多步联动动作,在一个单步中可以支持15步的动作;采用8寸全触摸屏界面,操作简洁方便;本系统可以适用于各种复杂的机械手系统中,支持注塑行业的产品取出、放入;支持加工行业的工件搬运;支持多动作的流水线作业。
三轴数控操作说明 十步搞定三轴雕刻1
三轴数控操作说明十步搞定三轴雕刻机特别提醒:首次使用请务必由熟练同学辅助操作,避免发生意外造成财产损失!1.用ArtCAM程序打开dxf文件,会弹出“新的模型尺寸”和“输入文件”,都选择“接受”即可。
最大化“二维查看”窗口。
2.找到左下角“刀具路径”标签,选择“二维刀具路径”下的“二维轮廓加工”3.在“轮廓加工哪一侧”点选“外”或“内”(一般选外);在“结束深度”输入数值(=0.1mm+材料厚度)在“轮廓加工刀具”点击“选取”Metric Tools-Wood or Plastic-3D Finishing-end mill 1.2mm (注意刀具参数下切步距应大于材料厚度)在右侧二维查看窗口选中要雕刻的图形(变成紫色)(图形线框间距不要小于1.2mm)在“材料”位置点击“设置”材料厚度(默认3.0mm)在“计算”位置点击“现在”,正常情况闪现“偏置轮廓”。
点击“关闭”如果图形不封闭或重叠会出现“选项中同时包括开放和闭合矢量无法确定矢量方向”/“两个或多个已选矢量相互重叠”/“对当前刀具而言无刀具路径产生”。
此时点击左下角“助手”标签,找到“矢量编辑”下的“矢量诊断(绿色十字图标)”,选中所有图形,点击查找错误下的“查找”,出现绿色标记的地方可能存在错误,需要重新绘制该区域。
4.再次重复操作3,选择其他图形编辑路径。
5.在“刀具路径操作”选择“保存刀具路径”,将所有“已计算的刀具路径”添加到右侧“按单一文件保存刀具路径”,输入文件名并以“Camtech RESIN CMC3 MM(*.nc)格式”保存,关闭Artcam程序。
6.用NC studio程序打开并装载刚才保存的*.nc数控文件,点击右侧“自动”右击选择“编辑当前加工程序”:将第二行“G9S10”改为“G9S20000”并删去倒数第二行“G53Z0”及空格(记事本也可打开此文件,更改后保存即可)。
右击选择“保存并装载至数控系统”。
7.点击“加工轨迹”标签,选择“仿真(F8)”按钮,可查看铣刀加工的运动轨迹,并确定工作原点。
三轴机械手设计说明书

目录前言 (2)第一章绪论 (3)1.1 引言 (3)1.2 工业机械手的含义 (4)1.3 选题背景与意义 (4)1.4 工业机械手的组成 (6)1.5 工业机械手的发展及国内外发展趋势 (7)第二章三轴伺服驱动机械手结构设计方案 (12)2.1 机械手的设计方法 (12)2.1.1 机械手的选择与分析 (12)2.1.2 直角坐标机械手的设计方法 (13)2.2 机械手的结构设计 (18)2.2.1 机械手的总体设计 (18)2.2.2 机械手的传动部件设计 (19)2.2.3 机械手的臂部设计 (20)2.3 三轴伺服驱动机械手机构的特点 (21)第三章工业机械手的运动系统分析 (22)3.1 工业机械手的运动系统分析 (22)3.1.1机械手的运动概述 (22)3.1.2 机械手的驱动方式 (24)第四章三轴伺服驱动机械手零件的设计 (33)4.1 伺服电机的选择 (33)4.2 减速机的选择 ..................错误!未定义书签。
4.3 齿轮齿条的选择 (35)4.4 导轨的选择 (43)第五章结论 (45)致谢.............................错误!未定义书签。
参考文献.. (46)前言进入21世纪后,FANUC公司开发成功了配备有视觉传感器和力觉传感器的智能机械手。
到现在已拥有可搬运质量从 2 公斤到1.2 吨的种类丰富的商品系列。
随后,FANUC公司又开发了运用这一智能机械手的长时间连续机械加工系统机械手单元。
在整个加工工序中加工作业本身使用数控机床进行自动化加工已经非常普遍了。
但是,附带作业,毛比如在加工中心的夹具上进行加工材料装卸的作业,以及去毛刺边,清洗等作业中的很多部分,现在还是依靠人工来完成。
机械手单元使用智能机械手,不但实现了这些作业的自动化,而且在世界上最早实现了。
小时的长时间连续加工,现在在FANUC公司的工厂共运转着13 套这样的机械手单元。
全自动三轴试验系统操作手册(DS08、ZS08型)说明书

全自动三轴试验系统操作手册(DS08、ZS08型)北京华勘科技有限责任公司2013年05月目录第1章安装调试1.1采集器、控制器前后面板说明‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.2气、水管路连接‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥21.3试验软件安装‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥3 第2章试验参数2.1传感器参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥32.2通用参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥42.3剪切通用参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.4等向固结参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.5 K0固结参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥62.6一个试样多级加荷剪切参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥62.7反压饱和试验参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥72.8基床系数试验参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥72.9弹性模量试验参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥82.10体积变形模量试验参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥82.11剪切模量试验参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥8 第3章操作命令3.1 常用操作命令‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥93.2其它操作命令‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10 第4章试验准备与实施4.1 试验准备‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥114.2 开始试验‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥124.3 试验结束‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥124.4中压三轴阀门操作说明‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 第5章设备维护及注意事项5.1体变传感器调试‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥135.2增压装置调试‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥135.3传感器零点校正‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥135.4围压、主应力差传感器示值检查‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥145.5孔压传感器及孔压管路‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥155.6排水传感器及排水管路‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥155.7排水传感器标定‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥155.8注意事项‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥15 第 6 章常见故障处理6.1不联机‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥166.2传感器示值异常‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥166.3孔压管路堵塞‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥176.4排水管路堵塞‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥176.5不能加围压‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥176.6试验过程中异常情况及原因‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥18第一章安装调试1.1采集器、控制器前后面板说明1.采集器前面板(1)“复位”按钮,用于仪器运行出现异常时强行退出试验程序。
三轴伺服机械手安全操作规程【最新版】
三轴伺服机械手安全操作规程一、目的强化安全管理,增强安全意识,确保安全生产,消除人的不安全行为,物的不安全状态,使安全生产做到有章可循,有据可依,特制定本规程。
二、使用范围本规程适用于我公司操作人员、工艺人员、技术人员。
三、控制器各功能键3.1 紧急停止按键:按此键切断电源,立即停止全部的动作,接触紧急停止,将开关按照标识方向旋转解锁后,电源开关,电源开关OFF后再次设定为ON;3.2 动作可能键:手动操作时,边按此键及各手动操作键,进行机械手动作。
如果过分按动作可能键,将不能进行手动操作。
3.3 电源:将电源设定为ON/OFF的状态。
3.4 停止:自动运转中,连续步进进给操作中,按此键,机械手停止。
3.5切换运转:表示运转模式画面。
3.6复位:报警灯显示时,清除报警;另外从各画面返回到运转模式画面。
3.7 菜单:想要显示菜单画面时,按此键。
3.8 帮助:表示各设定画面或操作画面中的帮助。
3.9取出侧落下侧:按取出侧,走行轴往产品成型侧行走;按落下侧,走形轴往远离产品成型侧行走。
3.10 Z+:使机械手向下行走,Z-:使机械手向下行走;Y+:使机械手沿着动模方向运动,Z-:使机械手沿着定模方向运动。
3.11 姿态复归/动作:使夹具板姿势动作,复归。
3.12 回转复归/动作:使夹具板回转动作,复归。
3.13 夹具开/闭:使夹具开,闭。
3.14 步进进/退:和自动运转相同顺序,执行1个步进的前进,返回动作。
四、操作步骤4.1开机4.1.1控制开关转向“ON”。
4.1.2不使用机械手而用半自动生产时,控制开关转向“ON”,或由技术人员将脱机信号短接。
4.1.3将注塑机的机械手功能打开:托模-功能-机械手选择使用。
4.2 检查并确认气压4.2.1检查气源、气压是否达到5kg/cm2以上。
4.2.2检查各功能键显示灯是否正常。
4.3选择夹具4.3.1根据制品侧有无水口选择夹具或吸盘。
4.3.2根据制品形状、大小、重量等选择吸盘规格、数量。
三轴机械手系统使用手册
三轴机械手系统使用说明书系统由台达PLC(40EH)加步科7寸触摸屏组成,系统有2轴,3轴,4轴控制系统。
该系统运动指令只有直线功能,可实现机械手的各种点位控制。
以下是3轴系统的详细操作说明。
权限分3级,0级可以进入点动,自动页面,进行操作。
不需密码1级可以对应用程式进行编程,设定。
密码1234562级对设备的系统参数进行调试。
密码701011程式停止状态下,各运动轴自动完成搜索零点动作。
在系统设置中激活后才有效。
各轴的限位应安装完成。
在一些前提下,搜索零点方式并不是必须的,可使用人工确认零点的方式工作,系统具有断电位置记忆功能,在再次手动确认零点前,保持原零点位置有效。
长按3s,当前位置置为新的零点。
程式停止状态下,各轴快速返回零点位置。
零点可由搜索或手动确认。
设定点动时的移动速度。
设定快速返回零点时的移动速度。
设定搜索零点的移动速度。
x轴当前所处的位置。
y轴当前所处的位置。
Z轴当前所处的位置。
输出端口y10点动试动作按钮,其它相同。
指示相应输入x端口的状态。
点动运动轴时快速选择慢速移动。
x轴双向点动操作按钮y轴双向点动操作按钮z轴双向点动操作按钮进入手脉点动页面按钮,在系统设置中激活后才有效。
进入编写程式页面按钮进入自动操作页面按钮手脉操作选择手脉每一格对应的脉冲数被锁定,不能操作,只有手脉操作有效。
其它同前说明。
系统设定登录等级密码701011进入对刀示教界面。
示教方式有按钮操作示教,手脉示教两种。
进入示教点教导界面。
示教方式有按钮操作示教,手脉示教两种。
选择编写、查询的程式序号,主程0---4个,子程10—19个。
对程序行进行翻页操作。
指示当前的状态,人工可以在查询,编程两种状态切换。
查询中不能修改程式,只有进入编程状态,才可修改程式。
可编写的程序步。
按提示编写。
指令说明见后。
在当前行处直接插入一步。
删除当前步。
指令区,选择相应的指令。
在主程编写时,指令全可以使用,进入子程编写时,5类运动指令不能使用,只能编写动作程式。
动三轴 说明书

TYS-20型微机控制电液伺服土动三轴试验机使用说明书(电气部分)西安力创计量仪器有限公司目录第一章测量控制系统概述第二章使用环境要求第三章简要操作说明第一章测量控制系统概述该控制系统是专门用于动三轴试验机的测量控制系统,采用高精度AD转换器和先进的电子电路控制技术,放大电路,陷波电路去掉50H工频干扰,模拟地震波在正弦波、三角波、方波、梯形波状态下的动态试验,高速数据采集器可定时采样轴力、孔压、位移等工程量,采样时间间隔可设定,确保采样数据有效,完善的全自动的数据处理系统,多单片机作为前台机进行数据采集,后台机采用系统计算机进行操作、显示、数据处理和报告输出等。
具有应力、应变全数字闭环控制方式,是岩土、水利、基建等工程试验的理想设备。
本微机控制动态试验系统,在Windows系统下运行,优化设计的测量控接口,高速高分辨AD转换器,自动闭环跟踪测量, 精选世界著名品牌集成电路器件,高精度测量放大器和梳状滤波技术,确保了测量精度和系统的稳定性、可靠性。
电气、机械多重保护及自诊断系统,能定时对测量系统、伺服驱动系统进行巡回自检,当系统异常时,强制保护并报告状态,充分保证了试验机安全、可靠运行。
第二章使用环境要求1.环境温度为10℃?5℃,环境相对湿度不超过85%;2.在无振动、无明显电磁干扰的环境中;3.220V、50HZ电源,电压波动范围不超过额定电压的10%;4.防尘、周围环境无腐蚀性介质。
5.符合计算机工作环境。
6.有标准的可靠地线。
第三章软件操作1、软件说明程序启动后主界面显示如下:布置区域介绍如下:标题区:最上行,该行显示程序标题和打开的项目(工程)菜单区:从上第二行,文件:新建,打开一个项目文件;打开/存储一个配置文件;设置:输入试验参数,试样参数,其他参数;试验:开始试验;标定:标定传感器参数;工具:附带的计算用小工具;帮助:打开帮助文件;快捷键区:在第三行,同时可修改传感器量程;数据显示区:在界面的左首;实时显示所有传感器数据;疲劳次数、级数,应变。
机械手操作说明手册
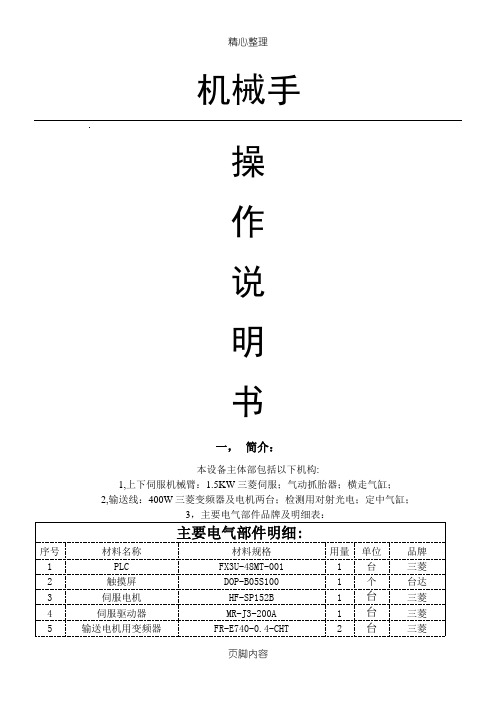
精心整理机械手操作说明书一, 简介:本设备主体部包括以下机构: 1,上下伺服机械臂:1.5KW 三菱伺服;气动抓胎器;横走气缸; 2,输送线:400W 三菱变频器及电机两台;检测用对射光电;定中气缸;3,主要电气部件品牌及明细表:主要电气部件明细:序号 1 2 3 4 5材料名称 PLC触摸屏 伺服电机 伺服驱动器 输送电机用变频器材料规格 FX3U-48MT-001 DOP-B05S100HF-SP152B MR-J3-200A FR-E740-0.4-CHT用量 单位品牌1台三菱1个台达1台三菱1台三菱2台三菱页脚内容6 三相智能伺服变压器7开关电源8小型断路器9小型断路器10小型断路器11小型断路器12交流接触器13接近开关14电源滤波器15继电器16继电器端子座17超声波传感器18对射光电精心整理 IST-C-045 NES-150-24 DZ47-60/3P/D16A DZ47-60/2P/D6A DZ47-60/2P/D10A DZ47-60/3P/D25A LC1-D1810M5C RN05-N(17*17)3 米 PNF221-G-2A RJ2S-CL-D24 RJ2S-05B UB800-18GM40-E4-V1 PZ-G52N二, 操作说明:1 台 三诺科技1 台 台湾明纬1个正泰1个正泰2个正泰2个正泰1个施耐德5 个 台湾 RIKO1个埃德8个idec8个idec1个倍加福4对基恩士2.1 操作前注意事项:机械手运行范围内不要有人员站立. 确认抓手用输入气源是否打开且压力达到 0.5MPa 及以上。
2.2 操作说明:2.2.1,简要说明: 1,本系统人机操作画面,支持中英文两种语言方式。
操作者可以在进入系统后的初始开机画面,选择指定的操作语言。
2,本系统有三种运行方式,分别是: 点动运行方式:指的是上下伺服在微动调试时的一种操作方式。
这种方式下屏上的 操作功能按键只有在受控时,相应的运动部件才会动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三轴机械手系统使用说明书系统由台达PLC(40EH)加步科7寸触摸屏组成,系统有2轴,3轴,4轴控制系统。
该系统运动指令只有直线功能,可实现机械手的各种点位控制。
以下是3轴系统的详细操作说明。
权限分3级,0级可以进入点动,自动页面,进行操作。
不需密码1级可以对应用程式进行编程,设定。
密码1234562级对设备的系统参数进行调试。
密码701011程式停止状态下,各运动轴自动完成搜索零点动作。
在系统设置中激活后才有效。
各轴的限位应安装完成。
在一些前提下,搜索零点方式并不是必须的,可使用人工确认零点的方式工作,系统具有断电位置记忆功能,在再次手动确认零点前,保持原零点位置有效。
长按3s,当前位置置为新的零点。
程式停止状态下,各轴快速返回零点位置。
零点可由搜索或手动确认。
设定点动时的移动速度。
设定快速返回零点时的移动速度。
设定搜索零点的移动速度。
x轴当前所处的位置。
y轴当前所处的位置。
Z轴当前所处的位置。
输出端口y10点动试动作按钮,其它相同。
指示相应输入x端口的状态。
点动运动轴时快速选择慢速移动。
x轴双向点动操作按钮y轴双向点动操作按钮z轴双向点动操作按钮进入手脉点动页面按钮,在系统设置中激活后才有效。
进入编写程式页面按钮进入自动操作页面按钮手脉操作选择手脉每一格对应的脉冲数被锁定,不能操作,只有手脉操作有效。
其它同前说明。
系统设定登录等级密码701011进入对刀示教界面。
示教方式有按钮操作示教,手脉示教两种。
进入示教点教导界面。
示教方式有按钮操作示教,手脉示教两种。
选择编写、查询的程式序号,主程0---4个,子程10—19个。
对程序行进行翻页操作。
指示当前的状态,人工可以在查询,编程两种状态切换。
查询中不能修改程式,只有进入编程状态,才可修改程式。
可编写的程序步。
按提示编写。
指令说明见后。
在当前行处直接插入一步。
删除当前步。
指令区,选择相应的指令。
在主程编写时,指令全可以使用,进入子程编写时,5类运动指令不能使用,只能编写动作程式。
对刀界面用于编程时,换刀指令中对刀架位置进行示教。
选择教导对应的刀架。
教导位置确认无误按完成按钮,绿灯变红,对刀位置完成保存。
用于设定示教位置后,长按3s后,三轴同动移动到设定的位置。
偏移表中偏移的点以绝对示教的数据来保存。
偏移指令执行时,以程式运行当前的刀架为目标,对该刀架的偏移累计进行计算。
通过当前偏移点的数据与对刀累计位的偏差来保存。
换刀时所移动到的位置就是偏移示教的位置。
示教过程与对刀示教一致,但其保存的示教位置不能进行修补,偏移。
共可保存60点数据。
进入修补界面,换刀的目标位置进行修补。
进入偏移累计清除和查询。
自动加工时指定起始的程式号,可选择0---4个。
修改程式序号后,必须按归零位完成归位后,程式序号才有效。
程式运行的当前程式号和对应步,对应编程的步骤。
选择程式运行的方式。
单步:表示启动按钮按一次,程式运行一步后停止。
单次,表示启动按钮按一次,程式运行一遍后回位停止。
连续:表示启动按钮按一次,程式按程式运行完成,回位后又重新启动运行但受产量控制,当产量=设定产量时停止加工或急停按钮停车。
连续时产量控制设定与控制。
当前位置。
当前运行步的程式和下一步的程式内容。
自动运行时的移动速度系数,=100时,速度按设定的实际值运行。
按钮,以归位的速度回到(0,0,0)处。
Z轴先回位,x,y轴再同时回位。
按钮,按下按钮,运行完当前步暂停。
再弹起按钮,可继续运行后续程式。
按钮,等同启动按钮,开启程式运行。
按钮,等同急停按钮。
停车。
选择修补对刀位对应的程式号。
只能在自动界面选取。
选择刀架号,针对需要修补刀号,选择。
当前:表示前一,指示前一个刀架,后一:指示后一个刀架。
对刀教导的位置。
示教时保存示教的对刀位,修补后累计,记录换刀时的换刀最终位置。
修补量的输入。
输入修补的量,确认后,直接修改换刀的位置,记录在补刀累计。
查看换刀位置的修改情况,并手动可清除偏移的累计量。
归位完成可清除累计。
选择查看刀架对应的程式号。
只能在自动界面选取。
选择刀架号,针对需要修补刀号,选择。
当前:表示前一,指示前一个刀架,后一:指示后一个刀架。
对刀教导的位置。
示教时保存对刀位,实际位置根据需要修补后的换刀位置记录,记录换刀时的换刀最终位置。
偏移的累计量。
在程式运行中执行偏移指令,矩阵指令会修改偏移累计。
其通过换刀指令的运动,修改换刀的最终移动位置实现偏移和矩阵控制。
清除偏移累计量,确认后,偏移指令,矩阵指令均从起始点从新开始。
系统设定登录等级密码701011X轴的传动系数。
用于设定尺寸与实际移动尺寸相一致。
Y轴的传动系数。
用于设定尺寸与实际移动尺寸相一致。
Z轴的传动系数。
用于设定尺寸与实际移动尺寸相一致。
搜索零点时的位置,同时也确定为该轴运动时的负向软限位值设定该轴正向运动时最大的行程。
为正向软限位。
没说明的参照其它说明。
系统使用日期限定。
由确定零点,该零点会一直保持,直到再次指定新的零点。
零点确认通过长按为简化系统手脉可以关闭,关闭时,点动操作各轴只能使用屏上按钮点动。
手脉操作界面均不可见。
选择急停按钮按下时对输出端口的动作。
在某些工况中,急停时需要保持输出状态。
例,数控夹头中工件不能松开等。
点位控制的实现矩阵料盘的编程实现:示教矩阵料盘的起点,保存在刀架0#---9#号的对刀位置。
通过修补该起点尺寸,整体移动料盘的割矩阵点位置。
例程:0 换刀速度1#刀架1#使用的偏移累计指定1 矩阵0X轴步数间距2 矩阵1Y轴步数间距3 调子程10 在矩阵料盘各点的动作程式4 计数器2# 设定次数控制次数5 跳转计数器2没完成0 控制矩阵各点动作完成6 结束工件任意尺寸点孔例程:0 换位速度2#刀架2#偏移累计1 偏移1# 1 0 指定偏移表偏移累计(=表项+偏移累计)偏移表存相对于前一点的偏差量。
2 跳转401 -1 0 偏移表1#偏移结束3 结束车床矩阵料盘上料机械手三轴资源:夹紧缸1 y11 信号x20 夹紧缸2 y12 信号x21 转缸y13 信号x22 x23 夹头缸y14 信号x24 车床启动y17 完成x17开机条件:车床夹头中夹持一个加工后的成品。
取原料1#刀架0 换位3000 1 2 以3000速度快速移动到1#刀架示教位,其偏移累计来源与2#刀架的偏移累计。
1 直线z 3000 50.00 0 z轴以速度3000移动50mm。
2 调子程0 0 11 转取原料子程11#执行3 直线z 3000 -50.00 0 z轴以速度3000移动-50mm。
4 动作113 1 0.3 转缸y13转90度,停0.3s放成品2#刀架5 换位3000 2 2 以3000速度快速移动到2#刀架示教位,其偏移累计来源使用2#刀架的偏移累计。
6 直线z 3000 50.00 07 调子程0 0 12 转取放置成品子程12#执行8 直线z 3000 -50.00 0矩阵料盘9 矩阵 1 4 50.00 矩阵先再y轴向连续放置4个,间距50mm10 矩阵0 3 40.00 x轴向放置3排,排距40mm,每排4各11 动作113 -1 0.3 转缸y13回旋90度,停顿0.3s移位等待车床加工完成3#刀架12 换位3000 3 3 以3000速度快速移动到3#刀架示教位13 等待027 1 0.5 等待车床加工完成信号,完成后延时0.5s卸夹头成品4#刀架14 换位3000 4 4 以3000速度快速移动到4#刀架示教位,15 直线xy 3000 60.00 0 X轴以速度3000移动60mm。
16 调子程0 0 13 转取卸夹头成品子程13#执行17 直线xy 3000 -60.00 0 X轴以速度3000移动-60mm。
18 动作113 1 0.3 转缸y13转90度,停0.3s夹头上料5#刀架19 换位3000 50 5020 直线xy 3000 60.00 021 调子程0 0 14 转取送夹头上料子程14#执行22 直线xy 3000 -60.00 0 X轴以速度3000移动-60mm。
23 动作113 -1 0.3 转缸y13回转90度,停0.3s移位启动车床6#刀架24 换位3000 60 60 以3000速度快速移动到6#刀架示教位25 动作117 2 0.5s 启动车床加工,开关闭合0.5s矩阵2完成判断26 跳转402 -1 0 矩阵2#不完成,转0行执行放成品2#刀架27 换位3000 2 2 以3000速度快速移动到2#刀架示教位,其偏移累计来源使用2#刀架的偏移累计。
28 直线z 3000 50.00 029 调子程0 0 12 转取放置成品子程12#执行30 直线z 3000 -50.00 031 结束11#子程取原料动作111 1 0 夹子1夹原料等待020 1 0.2 夹紧结束12#子程放成品动作112 -1 0 夹子2放产品等待021 -1 0.2 松开结束13#子程卸成品动作112 1 0 夹子2夹产品等待021 1 0.2 已夹紧动作114 -1 0 送车头夹头缸等待024 -1 0.2 已松开结束13#子程上原料到夹头动作114 1 0 夹头缸夹产品等待024 1 0.2 已夹紧动作111 -1 0 松夹子1等待024 -1 0.2 已松开结束。