自动送料装车系统PLC控制系统正文
PLC__自动送料装车系统报告
电器控制与P L C课程设计自动送料装车系统的PLC控制目录第一章绪论 (1)第二章方案设计第一节课题介绍 (2)第二节硬件设计 (3)第三节元器件选择 (4)第四节软件设计 (5)第三章设计中碰到的问题及处理方法 (12)第四章小结 (13)附录一梯形图 (14)附录二设计的主电路、PLC控制电路 (15)附录三元器件清单 (16)参考书及参考网站 (17)第一章绪论本课程设计以自控轧钢机控制系统设计,说明PLC的工业应用。
目前我国大部分的轧钢机的控制系统都是从国外引进的,不仅成本昂贵,而且在维护等方面也非常不方便,一旦出现故障就有停产的可能,这严重阻碍了企业的正常生产。
针对这种情况,应对轧钢机控制系统进行改造,使其本地化,这就是设计本系统的主要目的。
轧钢机的控制系统在国外已经比较普遍,但在我国国内对于这方面的研究还是比较少,因此国产的控制系统几乎没有,这就更加有了对此系统进行改造的必要性。
在对系统进行改造前,必须对工艺流程、机械设备、原有的控制系统进行分析研究,只有在彻底搞清楚原理之后才能进行改造工作,因此分析这一步是非常重要的,并且也是很难很大的工作,之后的硬件设计、软件编程相对简单一些。
进行改造之后的控制系统不仅在维护方面更加方便,并且也降低了成本,在产品的一致性上也有了提高,为产品的各项参数指标的提高创造了更好的前提条件,有利于质量的提高。
轧钢机的应用越来越广泛,前景是非常好的。
第二章方案设计用PLC构成自动送料装车控制系统。
第一节课题介绍在小型控制系统中,大量的控制为顺序控制。
顺序控制是指根据预先规定的程序或条件,对控制过程各个阶段顺序地进行自动控制。
用PLC进行顺序控制十分方便,它可以采用多种编程方法,除了用基本逻辑指令和移位指令来编程以外,还可以用专用的顺序控制指令(例如步进指令)来编程。
本课题要求如下:某原料从料斗经过M1、M2、M3三台皮带运输机送出。
从料斗向皮带1供料由电磁阀K2控制,皮带1、皮带2、皮带3分别由电动机M1、M2、M3驱动。
自动送料装车系统PLC控制设计

自动送料装车系统PLC控制设计在设计自动送料装车系统的PLC控制时,需要考虑以下几个方面。
首先是系统的硬件设计。
自动送料装车系统的硬件设备包括传感器、执行器、电机控制器等。
传感器用于检测物料的位置和状态,如光电传感器可以检测物料的到位和离开状态,压力传感器可以检测物料的重量和压力等。
执行器用于控制物料的移动和装载,如气缸可以用于推动物料的移动,电机可以用于驱动输送带的运动。
电机控制器用于控制电机的启停和速度调节。
在PLC控制设计中,需要根据实际需求选取合适的硬件设备,并配置相应的输入输出端口。
其次是系统的逻辑控制。
自动送料装车系统的逻辑控制包括物料的检测、移动和装载的逻辑控制。
通过光电传感器等传感器检测物料的位置和状态,PLC可以根据这些信号对电机和执行器进行控制,实现物料的移动和装载。
例如,当光电传感器检测到物料到位时,PLC可以控制执行器将物料推动到指定位置;当光电传感器检测到物料离开时,PLC可以控制电机停止运动。
在逻辑控制设计中,需要根据实际流程和要求,编写PLC的逻辑程序,明确各个信号的处理方式和相应的控制动作。
最后是系统的安全设计。
在自动送料装车系统中,安全性是一个非常重要的考虑因素。
系统设计应该考虑到可能出现的故障和意外情况,并采取相应的安全措施。
例如,可以在输送带上设置紧急停止按钮,一旦发生紧急情况,可以立即停止输送带的运动;可以在执行器上设置限位开关,一旦执行器超过了安全范围,可以自动停止运动。
同时,还应考虑到保护设备的安全性设计,如安装防护罩,避免人员接触到危险部位。
在安全设计中,需要充分考虑系统的各个环节和可能的风险,并采取相应的措施保障工作人员的安全。
综上所述,自动送料装车系统的PLC控制设计主要包括硬件设计、逻辑控制和安全设计。
通过科学合理地设计PLC控制系统,可以提高自动送料装车系统的稳定性和效率,实现工业生产的自动化控制。
基于PLC的自动送料装车控制系统
基于PLC的自动送料装车控制系统设计摘要可编程序逻辑控制器(Programmable logic controller)简称PLC,由于PLC的可靠性高、环境适应性强、灵活通用、使用方便、维护简单,所以PLC的应用领域在迅速扩大。
尤其是近几年来,PLC的成本下降,功能又不段增强,所以,目前PLC在国内外已被广泛应用于各个行业。
本设计是为了实现送料小车的手动和自动化的转化,改变以往小车的单纯手动送料,减少了劳动力,提高了生产效率,实现了自动化生产。
而且本送料小车的设计是由于工作环境恶劣,不允许人进入工作环境的情况下而产生的。
首先,用PLC编程实现送料系统的基本功能。
其次,画出组态仿真画面,定义组态变量,对组态中的一些基本量如(管道中物料的流动)进行仿真。
然后,把PLC程序和组态结合,通过数据连接,实现通信。
最后,运行PLC程序及组态仿真程序,实现组态对整个系统实时监控。
在实现组态控制时,本文详细的介绍了组态王软件的编程及通信,使读者很容易的了解组态王软件运行仿真过程。
关键词:PLC,组态王,监控,仿真Design of automatic loading control system based onPLCABSTRACTProgrammable logic controller referred to PLC ,because of the high reliability PLC adaptability,flexibility,environment,use convenient,simple maintenance,so the application of PLC in the rapidly expanding. Especially in recent years,the cost of PLC down and function increasing,so,at the moment,PLC at home and abroad,has been widely used in various industries.In order to achieve the design of the car feed the transformation of manual and automated,simple to change the past,car manual feed,a reduction of the workforce,increased productivity,automated production! Feeding and the car is designed to be as a result of bad working conditions are not allowed to enter the working environment of the circumstances formed.First, programs with PLC realizes feed system's basic function. Next, draws the configuration simulation picture, the definition configuration variable, like (in pipeline material flowing) carries on the simulation to configuration some fundamental quantities. Then, the PLC procedure and the configuration union, through the data connection, realizes the correspondence. Finally, moves the PLC procedure and the configuration simulated program, realizes the configuration real-time monitoring overall system. When realizes the configuration control, this article detailed introduction configuration king software's programming and the correspondence, caused the reader very easy to understand the configuration king software movement simulation process.KEY WORDS: PLC, configuration, monitoring, simulation目录前言 (1)第1章概述 (2)1.1可编程控制技术的发展状况 (2)1.2基于PLC控制的自动送料装车系统简介 (3)1.3PLC的特点 (3)1.4PLC的应用领域 (4)第2章系统硬件设计 (6)2.1系统硬件的设计 (6)2.1.1自动送料装车系统控制工艺要求 (6)2.1.2主电路的设计 (7)2.1.3 I/O地址分配 (7)2.1.4 PLC外部接线图的设计 (8)第3章系统软件设计 (10)3.1系统功能的分析与设计 (10)3.2系统结构的分析与设计 (11)3.2.1 I/O信号的分析与设计 (11)3.2.2数据结构的分析与设计 (12)3.3程序设计的常用方法 (12)3.4PLC程序设计 (14)3.4.1 PLC程序流程图 (14)3.4.2 PLC梯形图设计 (15)3.5组态监控系统设计 (17)3.5.1 监控系统的形成背景 (17)3.5.2 组态王工程的建立 (18)3.5.3 组态画面的建立 (20)3.5 4 定义IO设备 (23)3.5.5 构造数据库 (24)3.5.6 建立动画连接 (26)3.5.7 应用程序命令语言 (27)第4章系统软硬件调试 (30)4.1软件调试概述 (30)4.2通信协议 (31)4.3PLC软件测试 (32)4.3.1 PLC程序的模拟调试 (32)4.3.2 PLC程序下载 (32)4.4组态调试 (34)4.4.1 组态通讯调试 (34)4.4.2 组态监控仿真 (35)4.4.3 导航菜单 (37)结论 (39)谢辞 (41)参考文献 (42)外文资料翻译 (43)前言1968年,美国通用汽车公司首先提出可编程控制器的概念。
PLC实现自动送料装车系统

PLC实现自动送料装车系统摘要:PLC的定义有许多种。
国际电工委员会(IEC)对PLC的定义是:可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。
可编程序控制器及其有关设备,都应按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计。
引言:PLC具有通信联网的功能,它使PLC与PLC 之间、PLC与上位计算机以及其他智能设备之间能够交换信息,形成一个统一的整体,实现分散集中控制。
多数PLC具有RS-232接口,还有一些内置有支持各自通信协议的接口。
配料工人收到每天的生产作业表后, 将依次对每种原料进行称重。根据配料的多少, 先计算每种成分的重量,然后在各种成分的料桶中取料,送到电子称上进行称重,最后进行包装。在这个过程中工人工作繁重,出错率高,称重重量无监测,生产数据无纪录等不能保证企业的生产工艺。文中以PC机编程,可编程逻辑控制器(PLC),现场总线技术等现代工控技术为基础,开发了以PC机为上位机, 以PLC作为下位机的自动配料系统。在整个生产过程中,一旦生产计划制定完成,计算机将按照计划对每种原料进行称重,不再需要人工来干预。在这个过程中工人只是进行取料,由计算机通过电子称发来的数据校核重量,减轻了工人的工作负担,提高了工作效率。关键词:通信,传送,配料1 监控系统的结构与功能1.1 监控系统的结构自动配料监控系统由两台计算机作为整个系统的人机界面。
其中一台为主站,完成全部系统参数设定、过程监控、数据记录;另一台作为从站,以主站为依托,主管后配料系统的数据设定、过程监控。
主站直接同三菱PLC系统、前配料秤自动控制仪表和后配料秤相通信。
前配料监控系统现场采用密封型接线盒,防尘、防潮,可确保信号传输可靠。
前配料秤仪表采用专用工业过程控制仪,通过RS一485总线与中控室实现通信,既可独立控制,又可实现PLC联机控制。
基于PLC的自动送料装车控制系统
基于PLC的自动送料装车控制系统设计摘要可编程序逻辑控制器(Programmable logic controller)简称PLC,由于PLC的可靠性高、环境适应性强、灵活通用、使用方便、维护简单,所以PLC的应用领域在迅速扩大。
尤其是近几年来,PLC的成本下降,功能又不段增强,所以,目前PLC在国内外已被广泛应用于各个行业。
本设计是为了实现送料小车的手动和自动化的转化,改变以往小车的单纯手动送料,减少了劳动力,提高了生产效率,实现了自动化生产。
而且本送料小车的设计是由于工作环境恶劣,不允许人进入工作环境的情况下而产生的。
首先,用PLC编程实现送料系统的基本功能。
其次,画出组态仿真画面,定义组态变量,对组态中的一些基本量如(管道中物料的流动)进行仿真。
然后,把PLC程序和组态结合,通过数据连接,实现通信。
最后,运行PLC程序及组态仿真程序,实现组态对整个系统实时监控。
在实现组态控制时,本文详细的介绍了组态王软件的编程及通信,使读者很容易的了解组态王软件运行仿真过程。
关键词:PLC,组态王,监控,仿真Design of automatic loading control system based onPLCABSTRACTProgrammable logic controller referred to PLC ,because of the high reliability PLC adaptability,flexibility,environment,use convenient,simple maintenance,so the application of PLC in the rapidly expanding. Especially in recent years,the cost of PLC down and function increasing,so,at the moment,PLC at home and abroad,has been widely used in various industries.In order to achieve the design of the car feed the transformation of manual and automated,simple to change the past,car manual feed,a reduction of the workforce,increased productivity,automated production! Feeding and the car is designed to be as a result of bad working conditions are not allowed to enter the working environment of the circumstances formed.First, programs with PLC realizes feed system's basic function. Next, draws the configuration simulation picture, the definition configuration variable, like (in pipeline material flowing) carries on the simulation to configuration some fundamental quantities. Then, the PLC procedure and the configuration union, through the data connection, realizes the correspondence. Finally, moves the PLC procedure and the configuration simulated program, realizes the configuration real-time monitoring overall system. When realizes the configuration control, this article detailed introduction configuration king software's programming and the correspondence, caused the reader very easy to understand the configuration king software movement simulation process.KEY WORDS: PLC, configuration, monitoring, simulation目录前言 (1)第1章概述 (2)1.1可编程控制技术的发展状况 (2)1.2基于PLC控制的自动送料装车系统简介 (3)1.3PLC的特点 (3)1.4PLC的应用领域 (4)第2章系统硬件设计 (6)2.1系统硬件的设计 (6)2.1.1自动送料装车系统控制工艺要求 (6)2.1.2主电路的设计 (7)2.1.3 I/O地址分配 (7)2.1.4 PLC外部接线图的设计 (8)第3章系统软件设计 (10)3.1系统功能的分析与设计 (10)3.2系统结构的分析与设计 (11)3.2.1 I/O信号的分析与设计 (11)3.2.2数据结构的分析与设计 (12)3.3程序设计的常用方法 (12)3.4PLC程序设计 (14)3.4.1 PLC程序流程图 (14)3.4.2 PLC梯形图设计 (15)3.5组态监控系统设计 (17)3.5.1 监控系统的形成背景 (17)3.5.2 组态王工程的建立 (18)3.5.3 组态画面的建立 (20)3.5 4 定义IO设备 (23)3.5.5 构造数据库 (24)3.5.6 建立动画连接 (26)3.5.7 应用程序命令语言 (27)第4章系统软硬件调试 (30)4.1软件调试概述 (30)4.2通信协议 (31)4.3PLC软件测试 (32)4.3.1 PLC程序的模拟调试 (32)4.3.2 PLC程序下载 (32)4.4组态调试 (34)4.4.1 组态通讯调试 (34)4.4.2 组态监控仿真 (35)4.4.3 导航菜单 (37)结论 (39)谢辞 (41)参考文献 (42)外文资料翻译 (43)前言1968年,美国通用汽车公司首先提出可编程控制器的概念。
自动送料装车系统PLC控制设计
精心整理P L C课程设计自动1.11.21.32.1结构框图 (5)2.12自动送料装车控制系统的操作面板 (5)第三章:PLC 控制系统 (6)3 PLC的选型 (6)第四章:PLC控制系统 (7)4.1初始状态 (7)4.2装车系统 (8)4.3停机控制系统 (10)4.4 程序时序图 (10)4.5 I/O地址分配表 (11)4.6 I/O接线图 (11)4.7 程序设计梯形图 (12)4.81.11.机M12.启动,M3感器继续循环上述的运行。
3.停止操作按下停止按钮系统恢复初始状态。
设计完成要求✍完成I/O分配图,及PLC外围电路图的设计及连接。
✍完成设计说明书。
✍完成PLC程序,并调试通过。
1.2控制原理1.初始状态在自动生产线中,刚开始红灯L1灭,绿灯L2亮,表明允许进车装料。
这时,进料阀指示灯K1、料斗指示灯K2不亮,M1、M2、M3皆为停止。
2.启动操作:按下启动按钮,开始下列操作:系统自动检测检测料斗是否已满(传感器S1亮表示满),如果料斗未满,则打开K1进料,当料斗启动,M3灭时),3.1.3M2K2L1L22.1电气原理图是用来表明设备电气的工作原理及各电器元件的作用,相互之间的关系的一种表示方式。
运用电气原理图的方法和技巧,对于分析电气线路,排除机床电路故障是十分有益的。
电气原理图一般由主电路、控制电路、保护、配电电路等几部分组成.2.12自动送料装车控制系统的操作面板如下第三章:PLC控制系统3. PLC的选型选择PLC的容量。
首先要对控制任务进行详细分析,把所有的I/O点找出来,包括开关量I/O 和模拟量I/O以及这些I/O点性质。
I/O点的性质主要指它们的信号类型,电压,输出的类型。
确定控制系统输出点的类型,交流220V的接触器、电磁阀,指示灯只留24V,选用的PLC的输出点数大于实际点数。
因为PLC的输出点一般是几个一组公用一个公共端,这一组输出只能有一种电源的种类和等级。
自动送料装车系统PLC控制系统正文

自动送料装车系统PLC控制系统设计宜春学院物理科学与工程技术学院自动化专业王强指导老师:唐勇波摘要:利用可编程序控制器(PLC)适应性强、可靠性高、维护方便等特点,采用PLC实现送料装车系统,使物料能够自动传送和装车,减少劳动力,提高生产效率。
本设计以系统的控制要求为出发点,进行了系统的硬件设计和软件设计(如梯形图和指令表等)。
并且采用PLC编程软件GX Developer,对梯形图进行编写,仿真和调试,测试结果表明采用PLC控制器能够达到设计要求。
关键词:PLC;自动送料;硬件设计;软件设计ABSTRACT: Programmable logic controller referred to PLC, It is characterized by high adaptability, high reliability, easy maintenance, etc. This design uses the PLC to realize feed loading system control requirements. And it makes materials automatically transmit and loading, reduce the labor force, improve production efficiency. This design is to control demand as the starting point of the system, introducing the hardware design and software of the system, such as ladder diagram and instruction list. Also this design uses PLC programming software GX Developer to write ladder diagram, simulate and debug. The test results show that adopting PLC can meet the design requirementsKEY WORDS: PLC; Automatic feed; Hardware Design; Software Design目录1. 前言 (1)1.1 系统设计的意义 (1)1.2 PLC的应用现状及发展趋势 (1)1.3 设计的主要内容 (1)2. PLC控制系统的硬件设计 (3)2.1 系统的控制要求 (3)2.2 系统的主电路图 (3)2.3 PLC机型的选择 (4)2.4 PLC容量的估算 (4)2.5 PLC输入、输出模块的选择 (4)2.6 按钮、开关类电器的选择 (4)2.7 熔断器的选择 (4)2.8 继电器的选择 (5)2.9 接触器的选择 (5)3. PLC控制系统的软件设计 (6)3.1 自动送料装车系统流程图 (6)3.2 统计输入、输出点数和选择PLC的型号 (6)3.3 PLC输入、输出端子的分配 (6)3.4 PLC输入、输出端子接线图 (7)3.5 三菱PLC编程软件GX Developer (7)3.5.1 GX Developer简介及功能 (7)3.5.2 使用GX Developer编写梯形图 (7)3.6 PLC控制程序的设计 (10)3.6.1软件设计方法 (10)3.6.2 PLC控制程序的分步设计过程 (10)结论 (13)谢辞 (14)参考文献 (15)附录 (16)附录1 自动送料装车系统总梯形图 (16)附录2 PLC控制程序总体指令表 (18)1. 前言1.1 系统设计的意义自动送料装车系统是基于PLC控制而设计的系统,该PLC控制系统实现了物料的自动传送和装车功能,代替了过去采用的人力运送物料。
PLC自动送料小车控制系统

7.6 PLC的基本应用7.6.2 PLC应用系统设计自动送料小车控制系统送料小车控制要求如图7.43(b)所示,I/O地址分配及功能如表7.12所示,主电路如图7.43(a)所示,控制电路如图7.43(c)所示。
在限位开关SQ1处装料,5s后装料结束,开始右行。
碰到SQ2后停下来卸料,5s 后左行。
碰到SQ1后又停下来装料。
这样不停地循环工作。
直到按下停止按钮SB3。
按钮SB1和SB2分别用来起动小车右行和左行。
在电动机正反转控制梯形图的基础上,设计出的小车控制梯形图如图7.44所示。
为了使小车自动停止,将I0.4和I0.3的常闭触点分别串入Q0.0和Q0.1的线圈电路。
为了使小车自动起动,将控制装、卸料延时的定时器T40和T41的常开触点分别与手动起动右行和左行的I0.1和I0.0的常开触点并联。
并用两个限位开关的常开触点分别接通装料、卸料电磁阀和相应的定时器。
设小车左行,碰到限位开关SQ1(I0.3)时,它的常闭触点使Q0.1断开,小车停止左行。
它的常开触点使Q0.2和T40线圈接通,开始装料和延时。
5s后T40的常开触点闭合,启动小车右行。
SQ1(I0.3)断开后停止装料。
右行和卸料过程的分析与上面的基本相同。
按下停止按钮SB3(I0.2)后小车将停止运动。
表7.12 自动送料小车控制系统PLC I/O地址分配功能名称动作器件I / O地址右行启动SB1 I0.0左行启动SB2 I0.1停止SB3 I0.2左限位SQ1 I0.3右限位SQ2 I0.4 电机过载保护FR1 I0.5右行KM1 Q0.0左行KM2 Q0.1装料YV1 Q0.2卸料YV2 Q0.3图7.43 自动送料小车控制电路。
自动送料装车plc控制
2自动送料装车plc控制
2.1 自动送料装车plc控制设计任务书
自动送料装车PLC控制
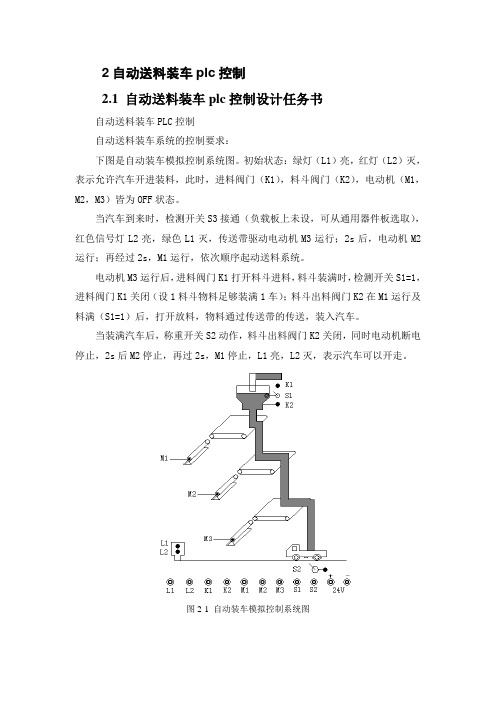
自动送料装车系统的控制要求:
下图是自动装车模拟控制系统图。
初始状态:绿灯(L1)亮,红灯(L2)灭,表示允许汽车开进装料,此时,进料阀门(K1),料斗阀门(K2),电动机(M1,M2,M3)皆为OFF状态。
当汽车到来时,检测开关S3接通(负载板上未设,可从通用器件板选取),红色信号灯L2亮,绿色L1灭,传送带驱动电动机M3运行;2s后,电动机M2运行;再经过2s,M1运行,依次顺序起动送料系统。
电动机M3运行后,进料阀门K1打开料斗进料,料斗装满时,检测开关S1=1,进料阀门K1关闭(设1料斗物料足够装满1车);料斗出料阀门K2在M1运行及料满(S1=1)后,打开放料,物料通过传送带的传送,装入汽车。
当装满汽车后,称重开关S2动作,料斗出料阀门K2关闭,同时电动机断电停止,2s后M2停止,再过2s,M1停止,L1亮,L2灭,表示汽车可以开走。
图2-1 自动装车模拟控制系统图
2.2 PLC控制程序设计
1、流程图
图2-1流程图
2、输入/输出信号分配
表2-2输入/输出信号分配
输入输出X0 S3 检测小车Y0 M3 电机3 X1 S2 称重Y1 M2 电机2
X2 S1 检测料是否
满
Y2 M1 电机1
Y3 K1 进料阀门
Y4 K2 出料阀门
Y5 L1 绿灯
Y6 L2 红灯。
自动送料装车系统PLC控制设计.
天津大学网络教育学院专科毕业论文题目:自动送料装车系统PLC控制设计完成期限:2016年1月8日至 2016年4月20日学习中心:嘉兴专业名称:电气自动化技术学生姓名:胡建昌学生学号:132092433040指导教师:黄凯自动送料装车系统PLC控制设计第一章 PLC控制系统原理设计和分析1.1设计要求(1)要求料仓中有料:即:当 S1=ON 时,装料阀 K1 关闭;当 S1=OFF 时,延时 2S,装料阀 K1 打开;(2)装车系统:A.启动系统 I0,此时,绿灯亮表示允许进车,当车到位后即(I3=1),绿灯灭,红灯亮。
如果车满(实际是称的重量信号)S2=ON (表示车满)不装。
绿灯亮,红灯灭,车开走。
如果车满信号 S2=OFF (表示车不满)装料开始:绿灯灭,红灯亮,皮带M3启动,2秒后皮带M2启动,2秒后皮带M1启动,2秒后下料阀K2启动,装车。
车满后S2=ON,绿灯灭,红灯亮,同时K2停,2秒后皮带M1停,2秒后皮带M2停,2秒后皮带M3停,同时绿灯亮允许车开走,此时S2=OFF,I3=0,进入下一辆车,反复循环。
B.系统停止I4:任何情况下全停。
特殊情况:装车过程中,车到位信号消失(即:I3=0)系统停止。
1.2控制原理在自动生产线中,刚开始红灯L1灭,绿灯L2亮,表明允许进车装料。
这时,出料阀门K2关闭,电动机M1、M2、M3均处于停止状态。
装车过程中,当汽车开进到装料位置后,限位开关S2为ON,红色信号灯L1亮,绿色信号灯灭,同时电动机M3和进料阀门K1开始工作,2S后启动电动机M2,在经过2S后启动电动机M1,在经过2S后才打开出料阀门K2,物料经料斗出料,物料通过传送带的传送装入汽车。
当车装满了时,限位开关S2动作,K2使料斗关闭,2S后停止电动机M2,再经过2S后停止电动机M1,M3和K1在M2停止2S 后停止,同时红灯L1灭,绿灯L2亮,表明汽车可以开走。
完成该过程后,可以继续等待下一次循环,或关闭生产线。
「自动送料装车系统PLC控制设计」

「自动送料装车系统PLC控制设计」自动送料装车系统是一种可以实现自动化物料输送和装车的系统。
PLC(可编程序逻辑控制器)是一种常用于工业自动化控制的设备,用于控制和管理自动化设备的运行。
在设计自动送料装车系统的PLC控制时,需要考虑以下几个方面:1.传感器和执行器的选择:传感器用于检测物料的位置、数量和状态,执行器用于控制物料的运动。
根据具体需求,可以选择适合的传感器和执行器,并将它们连接到PLC上。
2.输入和输出界面的设计:PLC通常具有输入和输出接口,用于与外部设备进行数据交换。
输入接口可用于接收来自传感器的信号,输出接口可用于控制执行器的运动。
设计输入和输出界面时,要考虑设备连接的类型和数量,并确定合适的接口类型和数量。
3.控制逻辑的编程:PLC控制逻辑的编程是实现自动送料装车系统的关键。
根据系统的工作流程和需求,设计适当的控制算法和逻辑,编写PLC程序。
程序中应包括物料输送的控制、装车操作的控制以及故障检测和处理等功能。
4.故障检测和处理机制的设计:自动送料装车系统在运行过程中可能会出现各种故障,如传感器故障、执行器故障等。
为了确保系统的稳定和可靠性,需要设计故障检测和处理机制。
可以通过监测传感器和执行器的状态来检测故障,并采取相应的措施进行处理,例如报警、停止系统运行等。
综上所述,自动送料装车系统的PLC控制设计需要考虑传感器和执行器的选择、输入和输出界面的设计、控制逻辑的编程以及故障检测和处理机制的设计。
通过合理的设计和编程,可以实现自动化物料输送和装车,提高生产效率和质量。
自动送料装车系统PLC控制设计
自动送料装车系统PLC控制设计一、引言PLC是一种可编程的数字逻辑控制设备。
在早期,它被用于开关量的逻辑控制。
它主要用于控制电机的正反转和电磁阀的切换动作,从而控制机械设备的运行。
只要合理分配输入和输出点,根据控制要求设计梯形图,使用基本指令和分步指令即可实现控制目标。
随着控制要求的不断提高,许多PLC厂商进一步优化和完善了PLC的功能,增加了功能指令,极大地拓宽了PLC的应用范围,使PLC可以在某些程序中取代控制器与计算机的协同工作系统,为工业生产和民用控制设计提供了方便。
PLC具有可靠性高、功能强、编程简单等优点,深受设计人员的喜爱。
PLC就像一种新型的高性能控制设备,它将计算机和继电器控制设备结合在一起。
PLC的基本单元包括中央控制器(CPU)、存储器、输入单元和输出单元。
除了基本单元外,PLC还可以添加许多扩展模块,以增强其功能和性能。
二、plc介绍可编程控制器简称PLC机。
可编程控制器是专门为工业环境应用而设计的数字操作电子系统。
它采用可编程存储器存储执行逻辑运算、顺序控制、定时、计数和算术运算的指令,并通过数字或模拟输入输出控制各种类型的机械设备和生产过程。
可编程控制器及其相关设备的设计原则是易于与工业控制系统整体连接,并具有扩展功能。
2.1plc的发展历程第1页,共11页可编程序控制器于60年代末在美国问世,1968年美国gm(通用(汽车)公司建议更换以下电气控制装置。
第二年,美国数字公司开发了基于集成电路和电子技术的控制装置,首次通过编程方式应用于电气控制。
这是第一代可编程控制器(PC)。
随着个人计算机(简称PC)的发展,为了方便和反映可编程控制器的功能特点,将可编程控制器命名为PLC。
到了20世纪70年代中期,随着半导体技术的发展,各种位芯片机和八位微处理器相继问世。
由于CPU的引入,可编程控制器技术有了飞跃性的发展,成为工业控制计算机的一个重要分支。
20世纪70年代末和80年代,可编程控制器进入成熟阶段,并继续向大规模、高速和高性能方向发展。
自动送料装车系统PLC控制系统正文
自动送料装车系统PLC控制系统设计宜春学院物理科学与工程技术学院自动化专业王强指导老师:唐勇波摘要:利用可编程序控制器(PLC)适应性强、可靠性高、维护方便等特点,采用PLC实现送料装车系统,使物料能够自动传送和装车,减少劳动力,提高生产效率。
本设计以系统的控制要求为出发点,进行了系统的硬件设计和软件设计(如梯形图和指令表等)。
并且采用PLC编程软件GX Developer,对梯形图进行编写,仿真和调试,测试结果表明采用PLC控制器能够达到设计要求。
关键词:PLC;自动送料;硬件设计;软件设计ABSTRACT: Programmable logic controller referred to PLC, It is characterized by high adaptability, high reliability, easy maintenance, etc. This design uses the PLC to realize feed loading system control requirements. And it makes materials automatically transmit and loading, reduce the labor force, improve production efficiency. This design is to control demand as the starting point of the system, introducing the hardware design and software of the system, such as ladder diagram and instruction list. Also this design uses PLC programming software GX Developer to write ladder diagram, simulate and debug. The test results show that adopting PLC can meet the design requirementsKEY WORDS: PLC; Automatic feed; Hardware Design; Software Design目录1. 前言 (1)1.1 系统设计的意义 (1)1.2 PLC的应用现状及发展趋势 (1)1.3 设计的主要内容 (1)2. PLC控制系统的硬件设计 (3)2.1 系统的控制要求 (3)2.2 系统的主电路图 (3)2.3 PLC机型的选择 (4)2.4 PLC容量的估算 (4)2.5 PLC输入、输出模块的选择 (4)2.6 按钮、开关类电器的选择 (4)2.7 熔断器的选择 (4)2.8 继电器的选择 (5)2.9 接触器的选择 (5)3. PLC控制系统的软件设计 (6)3.1 自动送料装车系统流程图 (6)3.2 统计输入、输出点数和选择PLC的型号 (6)3.3 PLC输入、输出端子的分配 (6)3.4 PLC输入、输出端子接线图 (7)3.5 三菱PLC编程软件GX Developer (7)3.5.1 GX Developer简介及功能 (7)3.5.2 使用GX Developer编写梯形图 (7)3.6 PLC控制程序的设计 (10)3.6.1软件设计方法 (10)3.6.2 PLC控制程序的分步设计过程 (10)结论 (13)谢辞 (14)参考文献 (15)附录 (16)附录1 自动送料装车系统总梯形图 (16)附录2 PLC控制程序总体指令表 (18)1. 前言1.1 系统设计的意义自动送料装车系统是基于PLC控制而设计的系统,该PLC控制系统实现了物料的自动传送和装车功能,代替了过去采用的人力运送物料。
基于PLC的自动送料小车的控制系统设计

基于PLC的自动送料小车的控制系统设计自动送料小车(Automated Guided Vehicle,AGV)是一种能够自主导航并执行货物运输任务的无人驾驶车辆。
PLC(Programmable Logic Controller)被广泛应用于工业控制系统中,它可以对AGV进行控制和监控。
本文将介绍基于PLC的自动送料小车的控制系统设计。
1.系统架构2.车辆导航AGV车辆的导航可以采用多种方式,如激光导航、磁导航、视觉导航等。
其中,激光导航是一种成熟且精度高的导航方式。
AGV车辆通过激光传感器不断扫描环境,获取地图信息并确定自己的位置,然后根据目标位置进行导航。
PLC控制器接收到目标位置后,会通过与AGV车辆的通信接口将导航指令发送给车辆。
同时,PLC控制器也会接收车辆的实时位置信息,用于实时监控和调度任务。
3.任务调度在自动送料小车的控制系统中,PLC控制器负责任务的调度和分配。
根据系统中的任务优先级和车辆当前状态,PLC控制器会为每个车辆分配相应的任务。
这些任务包括货物的取放、货物的运输、车辆的充电等。
PLC控制器会根据任务的优先级和车辆的位置、状态等信息,制定最优的调度策略。
通过合理的任务调度,可以提高系统的效率和生产能力。
4.AGV驱动器AGV驱动器负责控制车辆的运动。
它接收PLC控制器发送的运动指令,并控制车辆的速度和方向。
AGV驱动器还可以监测车辆的运动状态,如速度、位置等,并将这些信息反馈给PLC控制器。
PLC控制器可以根据车辆的运动状态进行实时监控和控制。
例如,当车辆遇到障碍物时,PLC控制器会根据传感器的反馈信息,及时调整运动方向或停止车辆的运动,确保车辆的安全。
5.系统安全性设计在自动送料小车的控制系统设计中,安全性是一个重要的考虑因素。
为了确保系统的安全运行,可以采取以下措施:-安全区域划分:将工作区域划分为安全区域和非安全区域,并通过传感器实时监测车辆与人员或其他障碍物的距离,避免发生碰撞事故。
自动送料装车系统PLC控制设计

自动送料装车系统PLC控制设计自动送料装车系统主要由送料机构、输送线、装车台和控制系统等组成。
PLC作为整个系统的核心控制设备,负责接收和处理各个传感器、执行器的信号,并根据预设的程序控制装车过程的各个环节。
PLC控制设计的关键目标是提高系统的运行效率、安全性和可靠性。
首先,PLC控制设计需要合理规划系统的硬件结构。
根据自动送料装车系统的特点和需求,选择适合的PLC设备和通信模块,确保系统的稳定性和可扩展性。
同时,还需考虑各个设备之间的连接方式和通信协议,确保数据的可靠传输和实时监控。
其次,PLC控制设计需要编写合适的控制程序。
程序设计应考虑系统的工作流程和逻辑关系,设置合理的传感器触发条件和执行器动作。
同时,还需考虑异常情况的处理,如传感器故障、执行器堵塞等,以确保系统的安全性和可靠性。
在控制程序的编写过程中,需要充分利用PLC的各种功能模块和指令,如计时器、计数器、比较器等,以实现对系统任务的准确控制。
此外,还需考虑对系统运行状态的监测和记录,以便及时分析和排除故障。
除了基本的控制功能外,PLC控制设计还需要考虑人机界面的设计。
通过合理设置触摸屏或按钮等人机界面元素,方便操作员对系统进行监控和控制。
同时,还需提供相应的故障诊断和报警功能,以及操作员对系统参数进行设置和调整的接口。
最后,PLC控制设计还需要进行系统的仿真和调试。
通过利用PLC的仿真软件或专门的仿真设备,对控制程序进行模拟运行和调试,以确保系统的准确性和稳定性。
同时,还需进行实际系统的调试和优化,不断完善和提高系统的性能。
总之,自动送料装车系统PLC控制设计是一个复杂而关键的工作,需要考虑系统的硬件结构、控制程序、人机界面以及系统的仿真和调试等方面。
只有合理规划和设计,才能实现系统的高效、安全和可靠运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动送料装车系统PLC控制系统设计宜春学院物理科学与工程技术学院自动化专业王强指导老师: 唐勇波摘要 :利用可编程序控制器(PLC)适应性强、可靠性高、维护方便等特点,采用PLC实现送料装车系统,使物料能够自动传送与装车,减少劳动力,提高生产效率。
本设计以系统得控制要求为出发点,进行了系统得硬件设计与软件设计(如梯形图与指令表等)。
并且采用PLC编程软件GX Developer,对梯形图进行编写,仿真与调试,测试结果表明采用PLC控制器能够达到设计要求。
关键词:PLC;自动送料;硬件设计;软件设计ABSTRACT: Programmablelogic controllerreferred to PLC, It is charact erized by high adaptability, high reliability,easy maintenance,etc、This design usesthePLC to realizefeed loading system control requirements、And it makes materials automaticallytransmitand loading, reduce the labor force,improve productionefficiency、This design is to control demand as thestarting p oint of the system, introducing the hardware designand software ofthe system, suc hasladderdiagramand instructionlist、Also this design uses PLC programmingsoftware GXDeveloper towriteladder diagram,simulate and debug、Thetest results show thatadoptingPLC canmeet thedesign requ irementsKEY WORDS:PLC; Automatic feed;Hardware Design; Software Design目录1、前言ﻩ错误!未定义书签。
1、1 系统设计得意义ﻩ错误!未定义书签。
1、2 PLC得应用现状及发展趋势ﻩ错误!未定义书签。
1、3 设计得主要内容ﻩ错误!未定义书签。
2、PLC控制系统得硬件设计..................................................................................... 错误!未定义书签。
2、1 系统得控制要求 (2)2、2 系统得主电路图............................................................................................ 错误!未定义书签。
2、3 PLC机型得选择ﻩ错误!未定义书签。
2、4 PLC容量得估算ﻩ错误!未定义书签。
2、5 PLC输入、输出模块得选择ﻩ错误!未定义书签。
2、6 按钮、开关类电器得选择.......................................................................... 错误!未定义书签。
2、7 熔断器得选择.............................................................................................. 错误!未定义书签。
2、8继电器得选择.......................................................................................... 错误!未定义书签。
2、9接触器得选择ﻩ错误!未定义书签。
3、PLC控制系统得软件设计ﻩ错误!未定义书签。
3、1自动送料装车系统流程图ﻩ错误!未定义书签。
3、2 统计输入、输出点数与选择PLC得型号................................................. 错误!未定义书签。
3、3 PLC输入、输出端子得分配ﻩ错误!未定义书签。
3、4 PLC输入、输出端子接线图...................................................................... 错误!未定义书签。
3、5 三菱PLC编程软件GX Developerﻩ错误!未定义书签。
3、5、1 GX Developer简介及功能ﻩ错误!未定义书签。
3、5、2使用GX Developer编写梯形图 ......................................... 错误!未定义书签。
3、6 PLC控制程序得设计ﻩ错误!未定义书签。
3、6、1软件设计方法ﻩ错误!未定义书签。
3、6、2 PLC控制程序得分步设计过程ﻩ错误!未定义书签。
结论 ............................................................................................................................... 错误!未定义书签。
谢辞ﻩ错误!未定义书签。
参考文献 ......................................................................................................................... 错误!未定义书签。
附录 ............................................................................................................................... 错误!未定义书签。
附录1自动送料装车系统总梯形图ﻩ错误!未定义书签。
附录2 PLC控制程序总体指令表................................................................................. 错误!未定义书签。
1、前言1、1 系统设计得意义自动送料装车系统就就是基于PLC控制而设计得系统,该PLC控制系统实现了物料得自动传送与装车功能,代替了过去采用得人力运送物料。
自动送料装车系统广泛应用于工厂物料传输得流水线设备中,可以传输煤粒、细砂等材料。
该系统就就是由电动机、传送带、给料器、传送带、小车、开关、按钮等设备组成;它通过控制三台电动机控制物料传送皮带得移动使物料传送。
而且由于PLC 体积小、维修方便、操作安全、编程简单、能适应工厂恶劣得工作环境,利用PLC控制送料传送系统将会大大降低劳动力,提高生产效率,为工厂带来更多得利润。
1、2 PLC得应用现状及发展趋势可编程控制器(即PLC)就就是在19世纪60年代末在美国首先出现得,它用来取代传统得继电器控制系统,实现逻辑控制,顺序控制,定时,计数等功能。
随着PLC技术得不断完善与成熟,PLC得处理速度有了大大提高,功能也日趋完善,具有通用性高、可靠性高、编程简单、抗干扰性强、适应性强、维修方便等特点。
广泛应用于化工、电力、石油、采矿、冶金、机械等领域。
在可编程控制器产生之前,工业生产过程与机械得控制只要就就是通过继电器来实现。
继电器一方面具有操作简单、实用、价格便宜,抗干扰性强得优点,另一方面具有可靠性不高、灵活性差,只具有逻辑、定时得特点。
因此,在现代化工厂生产过程中,为了降低劳动成本,减轻工人得工作负担,提高生产效率,同时也为了保障工人得生命安全,要求工业生产过程实现自动化,这就需要PLC控制系统。
随着科学技术得不断发展到今天,PLC得CPU处理速度有了很大得提高,功能也在日趋完善,现在得PLC不仅能实现开关量控制,还能实现模拟量控制、位置控制、联网通信等。
PLC未来得发展将在以下几个方面:1、体积小、速度快、高性能、价格低廉;2、大型化、多功能、网络化;3、与其她智能控制系统相互渗透与结合。
使用PLC控制,具有以下优点:1.编程简单,使用方便PLC得编程语言指令少,采用简明得梯形图、逻辑图与指令表等编程语言,编程简单易学,而且当改变控制方案而不需改变硬件接线,只需修改用户程序,不必须改变硬件接线。
2、抗干扰性强,适应性强PLC能够适应工业化生产现场,采取了隔离、屏蔽、联锁、滤波等安全措施,使之能抵抗外部干扰,适应恶劣得生产环境。
3、可靠性高,维护方便PLC使用软件代替继电器,仅需要少量得输入与输出硬件,可以因触点得接触不良产生故障大为减少,出现故障时只需将PLC得输入、输出模块拔掉,大大缩短了故障修复时间。
1、3设计得主要内容实现小车得送料装车系统控制要求得方法有多种,比如采用继电器、单片机、可编程控制器等。
在上文已经讲述了采用继电器得特点,一方面具有操作简单、实用、价格便宜,抗干扰性强得优点,另一方面但由于可靠性不高、灵活性差,只具有逻辑、定时得特点,难以达到适应复杂与程序可变控制要求,无法适应激烈得市场竞争,因此在本设计中不采用继电器。
另外如果采用单片机控制小车自动送料与装车,需要加入A/D、D/A转换器,线路接线复杂,且编程显得复杂与困难;而且单片机控制电路容易受外界环境得干扰,适应性不高且不稳定。
而由于本人得能力有限,因此也不采用单片机。
此外PLC内部具有定时与计数功能,因此我采用PLC来实现小车得自动送料装车得控制。
本设计以系统得控制要求为出发点,介绍了系统得硬件设计与软件设计(如梯形图与指令表等)。
并且采用PLC编程软件GX Developer,对梯形图进行编写,仿真与调试,最后得出结论。
要达到设计得控制要求,其过程分为两个部分:一就就是系统得硬件设计,二就就是系统得软件设计。
系统得硬件设计内容包括PLC机型得选择、容量得选择、I/O模块得选择、输入与输出设备得选择等;系统得软件设计得内容有分配输入与输出得点数、画出系统流程图、设计梯形图与指令表程序。
另外我采用三菱PLC编程软件GX Developer 对梯形图进行编写,经检查无误后再仿真与调试,最终得出结论。
预期得结果就就是:采用PLC编程软件进行系统得调试与仿真,通过控制输入触点得通与断,得出对应得输出。