D06调试软件说明
SD系列电动执行机构调试使用说明书

SD系列智能数字整体式电动执行机构调试使用说明书天津伯纳德执行器有限公司尊敬用户,XX系列智能数字显示式执行器采用微电子技术增加新的使用功能, 现场安装调试时请认真阅读使用、操作、调试、说明书。
概述智能型数字式电动执行机构控制器是我公司结合当今微电子技术、电子、电力器件成功设计新一代机电一体化产品,智能型数字电动执行器,能够适应当今多种复杂的控制系统要求,并为实际控制系统工程的特殊功能提供了多种不同类型的产品。
主要特点1.该系列电动执行器,在机械设计上采用组合结构,产品部件通用化、标准化、系列化,使得产品通过机械、电机、微电子控制电路,不同功能的组合可以形成多种系列和规格,通用性强,在对产品维护中,减少大量备品备件。
2•电动执行器的运行状态为就地数字显示,给定信号,阀位信号,显示0-100%数字量对应4-20111A信号,执行器的运行状态就地可直观地显示出来。
3給定控制信号与阀位输出信号隔离不共地,增强了抗干扰功能。
4.非侵入式,红外遥控操作。
5.单相、三相电动执行机构,采用过零触发电力器件,无触点功率输出控制伺服电机运行。
6.增加远控操作及现场操作的功能选择,通过霍尔开关实现就地(现场、远控切换及开、关转换操作。
7.角行程、直行程执行器的角度与行程距离不受90度或固定行程距离约束,在机械设计允许的范围内,均可满足现场安装所需角度或行程距离的要求。
&断信号、锁定、报警功能,执行器在运行过程中随机自检,运行状态诊断功能,当出现断信号时,执行器可预先按系统工艺要求,运行到应急设置位置(全开、全关、停止或指定位置。
9.自动判断伺服电机启动电流与超力矩状况,力矩传感器检测到超力矩信号后,根据系统工艺要求可随机组态正向与反向超力矩报警输出至控制室。
10.动态电制动,位置传感器测量到行程平衡点后,电子制动到准确位置,依据不同的力矩输出可独立设置正行程、反行程,制动时间(DIP设置,克服了机械摩擦制动缺陷。
敦泰FT6X06调试软件操作指引

敦泰FT6X06 调试软件操作指引
1.打开软件导入配制。
A.双击软件就用图标,打开软件进入导入基本配制界面;
B.选择参数文件的浏览选择,导入配制文件
C.选择BIN文件的浏览选择,导入FT6X06系列的原始BIN文件
D.单击进入键,进入基本配置界面
2.进行TP配置设置
A.基本配置:选择IC类型,其它可默认进入下一步
B.通道配制:选择用于VA区内的通道数
选择用于按键的通道数
VA区内通道排序:
查看TP结构图,左上角第一条通道对应的IC脚位编号写入第一对左侧
从TP屏体左上角第一对竖三角形开始为程序第一对感应通道
参照结构图,TP右上角最后一条通道为S10
按照规律将上层通道在调试软件中排序
按照上层竖三角的排序方法将下层通道和按键排序
3.下一步到扫描配置界面,可默认至下一步
4.调屏配置,根据需求选择拉边功能;按键坐标可在工程软件中读取写入,也可默认
5.进入坐标映射配置,根据实际硬件输入分辨率和VA高度及通道高度,完成进入下一步
6.全部配置,可查看TP整体调屏项目
确认OK可点击Save as…保存按要求调好的IC烧录BIN文件
7.退出初版调试软件
8.在调屏软件相应路径文件夹中,可查找到刚才调制出的初版BIN文件
9.将些BIN文件烧录写入待测TP的IC中,可进行读取数据,读取坐标,画线等测试(此操作参照烧录测试指引)
10.以上调试方法为TP新项目初调方法,用于新项目成功否判定;TP 在整机应用驱动请向方案商寻求解决方案
以上方法仅供参考!具体深入调试方法请寻问方案商。
Drive Wizard 在安川变频器调试中的应用
Drive Wizard 在安川变频器调试中的应用摘要介绍了安川变频器调试软件Drive Wizard的功能、使用方法,与变频器自身携带的数字式操作器做了比较。
通过在运输部成品码头冷轧库行车调试上的应用说明了参数设置的方法和注意事项。
关键词Drive Wizard;安川变频器;调试;参数设置随着电子技术的发展,变频器被广泛应用于各种调速场合。
2008年上海梅山钢铁股份有限公司运输部新增了4台桥式行车,同时对原来的四台转子切电阻调速的行车进行了电气改造,全部使用了安川F7和G7系列变频器。
这些变频器在安装调试过程中都不同程度的使用了工程应用软件DriveWizard。
DriveWizard的应用缩短了行车调试的周期,尤其是对相同参数的设备,通过对一台设备进行精密调试和参数优化,就可以通过DriveWizard软件对其他设备进行拷贝,即提高了调试人员的工作效率,也为以后设备维护人员提供了参考依据。
因此DriveWizard软件是广大电气工程技术人员应用安川变频器时不可缺少的工具。
1DriveWizard的主要功能1.1建立变频器应用工程在DriveWizard界面下,点击parameters下拉菜单下的Edit parameters打开已经建立好的工程或是新建一个工程。
通过工程的新建可以设定变频器基本参数和应用参数,也可以对已经设定好的参数进行修改。
新建工程可以选择使用的变频器系列,待选库中包含安川所有系列的变频器(如:V7、G5、J7、E7、F7、L7C、G7等)。
选择匹配的变频器容量,此时的变频器型号与设备上使用的保持一致,变频器型号选择可以通过下拉菜单选择也可以通过设定参数进行容量的设定,如目前使用的G7系列的变频器,设定参数按容量递增其设定值可以从0000到0037共41种型号,对应的参数名为O2-04。
选好变频器型号后可以选择控制模式,同变频器型号一样可以通过下拉菜单选择也可以通过设定参数选择控制模式,对应的参数名为A1-02。
D06电脑板调试软件使用说明_20100706

嘉德锐科电脑板调试软件使用说明目录一、软件主界面 (3)二、各功能选项介绍 (3)1、基本参数配置 (3)2、实时数据显示 (3)3、系统诊断 (3)4、自动匹配 (5)5、保存配置文件 (5)6、“读取配置文件”界面 (5)7、ECU重新编程 (5)8、退出 (5)三、详细功能说明 (6)1、基本参数配置 (6)(1)基本状态显示 (7)(2)F1转换设置 (7)(3)F2氧传感器 (8)(4)F3尾气排放 (8)(5)F4传感器 (8)(6)F5 MAP (10)(7)F6校准 (11)(8)F7燃气/燃油 (12)(9)F8混合比标定 (12)2、保存配置文件 (13)3、装载配置文件 (13)四、常用调试方法 (13)1、装载配置或新车型调试参数配置 (14)2、自动匹配或手动调节,使系统可工作 (14)3、系统细调节,使系统工作在最佳状态 (14)4、后期调试修正 (14)5、常用燃气系统调试流程图 (15)五、常见问题 (15)1、车辆启动后无发动机转速信号 (15)2、无喷油时间 (15)一、软件主界面如果打开软件是,显示英文界面,可在软件左上角第三项settings——language 中设置为中文。
二、各功能选项介绍1、基本参数配置用于对电脑板进行各种传感器、执行器的参数进行设置,以便使车、电脑板工作在最佳性能。
下图为基本参数配置的界面。
2、实时数据显示显示当前车辆及电脑板的工作状态,并可记录一段时间的各传感器数据,供调试做参考。
3、系统诊断“实时数据显示”界面“系统诊断”界面在系统监测到传感器等的短路故障时,可以通过此界面找到故障。
4、自动匹配可以根据软件提示,对不同车型进行初步匹配调试。
让车辆正常工作,但不是最佳工作状态。
自动匹配完成后,还需进行手动调节,使车辆工作在最佳状态。
5、保存配置文件把已经调试好的数据保存,以备在日后改装同样车型时使用。
“保存配置文件”界面6、“读取配置文件”界面7、ECU重新编程此功能会损坏电脑板程序,请忽使用!!!8、退出退出软件。
keil调试经验
KEIL调试高级技巧在调试状态,Debug 菜单项中的命令可以使用了,有关编译的工具栏按钮消失了,出现了一个用于运行和调试的工具栏,Debug 菜单上的大部份命令都有相应的快捷按钮。
从左到右依次是复位、运行、暂停、单步跟踪、单步、执行完当前子程序、运行到当前行、下一状态、打开跟踪、观察跟踪、反汇编窗口、观察窗口、代码作用范围分析、1#串行窗口、内存窗口、性能分析、工具按钮命令;然后按一下图示第二个“运行”按钮。
连接上相关的实验资源,本实验用一条8PIN的数据排线把实验仪的CPU部份的P1口(JP44)连接到八路指示灯部份的JP32。
这时你会看到实验仪的八个红色LED,轮流点亮,表示运行成功,也可以查看相关的变量和参数,非常方便。
⒈单步跟踪运行使用菜单Debug->Step 或上图第四个单步运行按钮或使用快捷键 F11 可以单步跟踪执行程序,在这里我们按下 F11 键,即可执行该箭头所指程序行,每按一次 F11,可以看到源程序窗口的左边黄色调试箭头指向下一行,如果程序中有Delay延时子程序,则会进入延时程序中运行。
⒉单步运行如果Delay 程序有错误,可以通过单步跟踪执行来查找错误,但是如果 Delay 程序已正确,每次进行程序调试都要反复执行这些程序行,会使得调试效率很低,为此,可以在调试时使用 F10 来替代 F11(也可使用菜单 Step Over 或相应的命令按钮),在 main 函数中执行到 Delay时将该行作为一条语句快速执行完毕。
为了更好的进行对比,我们重新进入仿真环境,将反汇编窗口关闭,不断按F10 键,可以看到在源程序窗口中的左边黄色调试箭头不会进入到延时子程序。
⒊全速运行点击工具栏上的“运行”按钮或按F5 键启动全速运行,全速执行程序,此时用户板上的 P1 口所接 LED 以流水灯状态显示。
⒋暂停点击工具栏上的按钮,此时用户板上的P1 口所接 LED 停止以流水灯状态显示,只有一个 LED 灯点亮(取决于暂停前的 P1 的值)。
通力调试说明

基本设置故障代码表V3f25调试指南一:概要调试指南仅用于v3f25驱动模块 713990REV2.0该驱动模块在出厂前已经过测试,并预设基本调节1.1安全与健康1.2 工具 数字万用表/测试法码1.3 参考资料am-1.1.30-b tc04807wl-en.tc04807w2-en so-11.65.09-6 as-11.65.01-a as-11.65.08-a1.4 操作界面: Lce 软件必须是3.3 相当于(chinaMAX1.4) 或以上版本,V3f25参数在Lce 菜单6中,其操作方法与其它菜单相似,更改Lce 菜单6中参数必须在Rdf 模式下进行,读取或更改完菜单6的参数后记隹退出菜单6。
更改后就参数就起作用,但断电后丢失。
用菜单6-99永久保存参数。
1.5 V3f25组成 V3F25包括:-Hcb :运动控制板385:A1(High speed motion control board)-逆变板385A2:(Lnverter board)-CMB :电流测量板385:A3(Current measure board) -风扃303 -变压器89-中间直流电路电容器385:c1,c2,(c3,c4) -大功率晶体管385:v1-v3-制动三极管385:v4(Braking Transistor) -二极管整流桥385:v5(Diode Bridge) -制动电阻306只用于40A 的v3f25中 1.6 385:Al hcb 板在此板上RDIR 插针有两个,不能少 (不论是水平或是垂直), 将两针都旋转90度就可以改变旋转娈压器的极性.1.7 385:A2 lnverter board 逆变板二 驱动系统/马达设定: 确保am-1.1.30的19.2章所列项目己检查完成2.1检查连接插:tacho 测速计(xg1,xg2;屏蔽线接到左侧板),resolver 旋转变压(xr),lwd(xw 接电阻2-10k) 2.2开电;先打下rdf 并接通298(保险开关),再送主电源(注意次序)2.3检查(6-3---7,6-60=19),如是q2马达还要检查6-8,6—10=12,用万用表检查Mxtorq 设定(核对附表);如是Q2马达,核对菜单6—10,测量Mxtorq(+)和AGND(-),调RTORQ,如果调整TORQ 则必须同时检查并调整TAC 和TSPL注:q1马达是一种新的mxl8马达型Array号,在马达铬牌上标为mxl8q22.4 tacho极性向上TPOL亮,否则调换XGl和XG2注意:rdir插针有两个,不能少(不管是水平还是垂直),将两插针都旋转90度就可以改变旋转变压器的极性.2.5 Resolve极性向上RPOL亮,否则将RDIR跳线转90度.注:以下(2.x)和(2.y)并非出自AM-11.65.15原文,而是参照FL-Il.65.20(2.x) 385:A3cmb板平衡调节,务必按以下次序:(a) 调p1,使U与CMB板上的AGND之间电压为0mv(+/-0.1mv);(b) 调p2,使W与CMB板上的AOND之间电压为0mv(+/-0.1mv);(c) 调p3,使v与CMB板上的AGND之间电压为Omv(+/-O.1mv)(2.y) 385:AIHCB板三相平衡调节,先短接UREF2:(a) 调RTR,使TTR与HCB板上的AGND电压为Omv(+/-0.5mv);(b) 调RTS,使TTS与HCB板上的AGND电压为0mv(+/-0.5mv);(c) 调RTT,使TTT与HCB板上的(d) 取走UREF2的短接线2.6 检查LWD;调LWD和LWDF使2.7 调整Resolver旋转变压器角度;旋转变压器角度自动调整介绍:有关,小化(对应于所需的马达转矩).调整过程是半自动的:-在钢丝绳未安装时通过RDF确保测速计(Tacho)和旋转变压器号已调整.-无论何时都要确保安全:钮中断调整,中断后只能从头开始-操作者自己决定方向-V3f25决定何时停止两次成功的RDF运行(v3f25运行是v3F25驱动马达旋转1.4HBC板上有一个蜂鸣器:-如果旋转变压器是零度(表示末调过),你能听到每隔15秒有四短音-在调整时你能听到两重蜂鸣响声-上行时,每隔一秒有四短音-下行时,每隔一秒有两短音-一长两短音表示有故障,可能的原因是;你按RDF按钮手指松开了,或安全回路断开了,那么只有从头开始调整注意:有一种特殊情况v3f25无法找到角度:如果你偿试了5次以上,每次刚启动就停住,那你就必须调换马达的U,V接线然后重新开始调整-在这种隋况下,你能听到一长三短的蜂鸣.(2.71)未安装钢丝绳:马达第一次运行,检查没有任何物件在曳引轮上.a) 确保制动器已经调好,检查RDF开关已打下.b)按6-70自动检查Pesolver角度菜单,依据图示,先上后下.2.72己安装钢丝绳a) 打下rdf开关,确保井道有足够的运行空间让马达转两圈.b) 检查xw插已接好,监时调节lwd(参看2.8)使5-1的载重显示与轿厢载荷相对应.c) 轿厢装入大约25-35%或65-75%的荷载(不能是空载或满载).Mxl8曳引机没有装制动电路,松制动器要小心,不能让溜车速度太快.此时不允许有人在井道!d) 短时松开制动器一下,检查tpol和rpol灯,上行都亮,下行都不亮.e) 如果轿厢向下溜,依照(2.71),即先上后下运行两遍.f) 如果轿厢向上溜,依照(2.71),但要先下后上(记住:总是先向重的方向运行).最后检查6-62,如果等于0度,表示自动检测不成功,重做;如果是1-360度,则用6-99保存.2.8临时调lwd注意: 安装进度在此时应装好钢丝绳,V3f25可以驱动轿厢运行.以下的1wd调整是基于下述情况.对重已装入大约40%的对重块,轿厢的装璜尚未安装.轿厢与对重大至平衡,但轿厢必须比对重重一点.a) 电气调整前必须先调整1wd机械安装.b) 连接1wd插头,代替临时插头.屏蔽线接到驱动模块左边的金属板上.Mxl8曳引机没有装备动态的制动电路,松制动器要十分小心,不能让溜车速度太快.c) 轿厢空载,短时松开制动器一下,确认电梯向下溜,轿厢比对重重一点.d) 轿厢空载,调节hcb的1wde(offset)至5-1菜单显示0%载荷.e) 轿厢空载,调节hcb的1wdf(gain)至5-l菜单显示50%载荷f) 卸掉半载(轿厢空载),调节hcb的1wde(offset)至5-1菜单显示50%载(因为此时轿厢与对重大致平衡).注意:如果实际情况与上述的不同,则调整称重不但要考虑轿内载荷,还要考虑轿厢与对重的平衡情况根据安装手册继续余下的工作.3 快车调试3.1细调lwda) 空载时,检查轿厢和轿底1wd的安装.b) 电压表一极接1wd(+),一极接agnd(-)c) 轿厢空载,调1wed至1.0v(+/-0.0lv),而且菜单5-1显示00d) 50%载荷:调1wdf至2.5v(+/-0.0lv),而且菜单5-1显示50.e) 打下rdf开关,拨出1wd插,检查lce菜单5-1的显示应低于-15%(如-20%)f) 如果菜单5-1的显示大于-15%(如-2%),应增大称重感应器到感应片之间的距离,并重调.参看E—lineMinlSpace安装手册12.10章节.3.2 SETUPa) 将rdf拉下,驱动电梯至底层或稍低一点.检查lcecpu板上30,61:u,77:n,?7:s灯亮.b) 技菜单5-2-l,蜂鸣响起:间歇的长音.rdf打上,电梯自动慢速向上.c) 如果电梯中途停下,会显示故障代码(111---116)d) 如果setup成功,将显示顶层楼楼层,电梯从Setup运行模式进入正常运行模式.3.3 测量马达力矩3.3.1平衡系数:a) 轿厢50%载荷,从底层向顶层快速运行,到达顶层后拉下rdf,记下6-71(马达力矩)读数(不带符号).b) 打上Rdf,从顶层向底层快速运行,到达底层后拉下rdf,记下6-71(马达力矩)读数(不带符号).c) 两次读数应很接近,两者的差(上减下)就是Balance error(平衡误差),该差值x额定载重量=??kg,就是半载轿厢与对重的重量差.d) 如果上行读数大,应增加对重的重量.c) 如果下行读数大,应减小对重的重量.f) 如果改变了对重的重量,则重新比较读数.3.3.2检查驱动参数:空车向上全程运行,到顶层停车后拉下rdf,检查6-71(马达力矩),不应小于0.6.空车向上全程运行,到顶层停车后拉下rdf检查6-71(马达力矩),不应小于1.2.否则应重复步骤(2.3),某些参数或电位器可能设置不对.细调和测试本章包含下列主题:舒适感,运行效率,停层精度,曳引试验和缓冲器试验.并不意味着每一台电梯都要一页一页地,系统地执行本章所有内容,如果你在上述某个主题有问题,只需根据相关主题的步骤执行.4.1舒适感:注意:本章所有参数都对电梯舒适感有影响,能达到的最好效果需要综合所有参数来调试.某些参数调好后不需要再调.同时,机械部分必须正确安装(导轨,平衡系数,轿厢及隔震,导靴)4.1.1震动a) 制动器调节:制动器衬垫不得与制动轮摩擦.b) 细调Resolver角度(Q2马达不需要做):电梯开到顶层,每2度增大或减少菜单6—22的值(<+/-20度),快车乘坐感觉尤其注意加减速过程.总是从同一层向下测试,用菜单6-99保存,并记录在移交文件里以便更换HCB板时需要.c) 速度控制:减小p或增大i能减轻可能的震动,但同时使干层精度变差.6-1(p Factor)=2.5,以0.5逐次减小,细调时用更小步.6-2l(I Factor)=0.1s,以0.1逐次增大.细调时用更小步.用菜单6-99保存d) 如轿厢有高频振动,可增大Tacho软件滤波时间Tacho filter time(6-32=15ms),用菜单保存.4.1.2 启动空车下行检查马达开始转动时制动器应先打开.可调整启动延时Start delay(6-33,默认值4CDH-0.3秒),不应太大,以免影响电梯的效率,用菜单6-99保存.回溜或很“冲”: 调之前Setup应以做好,因为驱动系统必须知道井道楼层位置数据.a) 首先检查电梯的平衡系数.b) 再检查称重信号,如需要重新调整1wd.c) 轿厢半载.d) 记下6-33启动延时值,将其暂时改为1秒.e) 记下6-1 p factor的值,如大于1.5将其暂时改为1.5.f) 在井道中部,调整6-24 Balance error(平衡偏差-0.2---0.2,每次改变0.02)直至rdf在两个方向启动都好,用菜单6-99保存.s) 在底层,检查6-26 Rope weight(钢丝绳重量),如有补偿链=0,如没有=3.0,每次改变0.5使慢车上行无回溜,如上行有回溜则调大,用菜单6-99保存.h) 使轿厢空载.在底层慢车上行调6-23(start torque scaling,默认值=1.00),每次改变0.05使慢车上行无回溜,均从底层启动,每次间隔10秒以确保启动LWD信号稳定.调好后用菜单6-99保存.i) 在顶层下行调6-27(cai-cable weight随行电缆重量,默认值=0),每次改变0.5.均从项层启每次间隔10秒以确保启动时LWD信号稳定,调好后用菜单6-99保存.j) 恢复6-1 P factor和6-33 Start delay原值,用菜单6-99保存.4 .1.3平层停车最后爬行距离(时间)调节,6-28(Final jerk distance)=125mm,减小6-28使平层更有效率,增大使平层更平滑.4.2电梯运行效率4.2.1 加速度参数(仅在必要时才更改,加速度影响77:U/N的位置)4.2.2 最后爬行距离(时间),6-28(Final jerk distance)=125mm,没有提前开门时4.3 平层精度4.3.1 正常运行的平层精度(注意调节参数P过大或I参数过小可能会引起振动)a) KTW/Q参数:默认值2.8,如果额定载重大(超过(1000kg)可调节参数最大至3.5,每次改变后都检查平层精度,同样用6-99保存,KTW/Q=(轿厢+吊架+门机构+装修+对重)的重量/额定载重.b) P(6-1)每次增加0.5,如细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) Final jerk distance(6-28)调整,参看4.1.34.3.2再平层精度(注意:调节参数P过大或I过小可能会引起振动)a) 如果只是个别楼层的再平层不好,先检查6l:u/n的重叠量.b) p(6-1)每次增加0.5,细调时用更小步,用菜单6-99保存.c) I(6-21)每次减少0.02,最后用菜单6-99保存.d) 增加Relevelling correction distance(6-29).最后用菜单6-99保存.4.4曳引试验参看Mini Space安装手册中的空载曳引试验的125%的曳引试验及制动试验.a) 按菜单6-72(enable traction test)曳引测试=1,该功能放宽了速度监察,只对第一次运行有效.b) 根据安装手册进行测试.c) 如果马达不够力:1)记录下HCB板Mxtorq(+),AGND(-)之间的电压.2)调高0.5v(注意:不能趄过4.8V,如果马达转动不了,不应驱动马达超过2至3秒)3)重新进行测试4)如果马达仍不能动,再0.5V调高0.5V(注意:不能超过4.8v,如果马达转动不了,不应驱动马达超过2至3秒)5)重新进行测试6)测试完成,恢复你改动过Mxtorq电压.4.5缓冲器测试(满速冲击测试,仅在必要时才做)4.5.1对重缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门c)按6-73(缓冲器测试功能,只有效一次).d)打上RDF,按顶层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器有无损坏.4.5.2轿厢缓冲器a) 用外呼把空载轿厢召到最低层,确保轿内无人.b) 拉下RDF,禁止外呼和开门.c) 按6-73(缓冲器测试功能,只有效一次).d) 打上RDF,按底层内选.e) 电梯刚离开顶层门区时(30灯灭)就按一下Lcecpu上的缓冲器测试按钮,故障代码0109或083闪烁.f) 立刻再按此按钮,并按住不放,对重将直冲缓冲器.g) RDF向下检查对重及缓冲器的无损坏.4.6马达电流测量测量HCB板上的(+)Meas和(-)Agnd之间的电压,Ivac=30A(如果驱动单元是40A)或lvac=60A(如果驱动单元80A)5故障排除5.1 V3f25故障代码:参看E—line Mini Space安装手册,在逆变板(1nverter board)上有三个红色LED灯,分别表示电流过大(SCL),制动电阻故障(BRSL),中间直流电压监察(DCL),同时在LCECPU板上显示故障代码5.2平层感应器:30,61u/n感应器之间必须装隔离片.5.3 HCB板复位:如果HCB板根本不工作且持续复位(你会听到蜂鸣报警),检查RESLOVER连线和接头.5.4 Reslover角度:当出现以下情况时:a)轿厢和钢丝绳已经装好.b)轿厢空载,对重被支撑着,因此松闸时对重不能被提起.c)Resslover角度未调.你可能无法移走对重下的支撑架,在这种情况下,有两重方法可以试一试(此时不允许有人在井道工作):a) 使用6-70自动检测角度,向下开动.b) 从360度开始,每隔30度试角度,向下开动.直到能提起对重,移走支撑架.然后依照2.7自动检测geslover角度.5.5更换HCB(参看AS-11.65.1)a) 用菜单6-62记下旧板的旋转变压器的角度,关电换新板.b) 设置6-62为0并按6-98(电梯处于RDF模式,停于底层)设置默认参数.c) 根据现场电梯规格调节菜单6-3至6-7.(对于q2马达,调节6-3至6-8,6-60=12)d) 设置6-62为旧的旋转变压器角度,按6-99保存.c) 核对列表数据(对于q2马达,核对6-10)检查Mxtorq电压(+/-0.01V),调rtorq.f) 调节TAC电压等于6-11(37.3mm)或6-12(75mm):拔下XC/l-2,将S5跳线从2-3移至l-2位置,测量TAC(+)和AGND(-),调节Tacho电位器,误差+/-0.01,调好后恢复S5和XG.g)调节TSPL电压等于6-13所示值(+/-0.01v),测量TAPL+和ANGD-,调节RSPL.h)调节LEDi)做SETUP5.6 TAC和TSPL电压计算参看英文原版(AM-11.65.15),(0%=1v,20%=1.6v,50=%2.5v,100%=4v,110%=4.3v)附录1:Lce菜单6中的v3f25参数(图号:713983)。
DEBUG主要命令

DEBUG主要命令DEBUG是为汇编语言设计的一种调试工具,它通过单步、设置断点等方式为汇编语言程序员提供了非常有效的调试手段。
1.DEBUG程序的调用在DOS的提示符下,可键入命令:C:>DEBUG [d:][path][文件名][参数1][参数2]其中文件名是被调试文件的名字,它必须是可执行文件(EXE),两个参数是运行被调试文件所需要的命令参数,在DEBUG程序调入后,出现提示符“-”,此时,可键入所需的DEBUG命令。
2.DEBUG的主要命令⑴显示内存单元内容的命令D,格式为:-D [地址] 或-D [范围]例如,显示指定范围内存单元内容的方法为:-D 100 1FF18E4:0100 47 06 04 02 38 01 47 06 -06 02 00 02 47 06 08 02 G...8.G.....G...18E4:0110 02 02 3B 04 02 68 02 00 -4D 20 50 51 56 57 8B 37 ..;..h..M PQVW.7 其中左边为十六进制表示形式,右边为ASCII码表示形式,“.”表示不可显示字符。
这里没有指定段地址,D命令自动显示DS段的内容。
⑵修改内存单元内容的命令E,它有两种格式1)用给定内容代替指定范围的单元内容,格式为:-E 地址内容表例如:-E DS:100 F358595A8D,即用F3,58,59,5A,8D五个字节代替内存单元DS:100到DS:104的内容。
2)逐个单元相继地修改,格式为:-E 地址例如:-E DS:10018E4:0100 89.78此命令是将0100单元内容89改为78。
78是程序员从键盘输入的。
程序员在修改完一个单元后,可按“空格”键继续修改下一单元内容,直至按“回车”键结束该命令。
⑶检查和修改寄存器内容的命令R,它有三种方式1)显示CPU内部所有寄存器内容和标志寄存器中的各标志位状态-R该命令可显示AX,BX,CX,DX,SP,BP,SI,DI,DS,ES,SS,CS,IP及标志寄存器内容。
28181新版调测软件使用方法.

软件安装 (2)1.1 JDK的安装配置 (2)1.2 调测软件安装 (6)1.3 运行环境要求 (6)2软件配置 (8)2.1 配置文件参数说明 (8)2.2 配置文件参数修改 (10)3程序启动和终止 (11)3.1 程序启动 (11)3.2 程序终止 (12)4软件操作说明 (13)5调试消息说明 (14)5.1设备连接(注册及校时) (15)5.2心跳 (15)5.3注销 (16)5.4实时点播 (16)5.5遥控消息 (18)5.6回放 (19)5.7下载 (20)5.8手动录像(开启和停止) (20)5.9录像文件检索 (21)5.10目录查询 (21)5.11布\撤防 (21)5.12报警 (22)5.13报警复位 (22)5.14设备状态查询 (22)5.15设备属性查询 (23)5.16设备远程启动 (23)1.软件安装1.1 JDK的安装配置1)进入Oracle的官方网站,下载JDK。
调测软件的运行需要JDK1.5以上的版本。
2)按照提示进行JDK的安装。
3)JDK安装完成以后,进行JAVA_HOME环境变量的配置,在“我的电脑”上右键,选择“属性”。
4)在“系统属性”窗口中选择“高级”,“环境变量”。
5)在“环境变量”“系统变量”窗口中点击“新建”按钮,添加“JAVA_HOME”变量,值为JDK安装根目录,例如“C:\Program Files\Java\jdk1.5.0_12”,点击“确定”按钮保存。
注:必须先配置JAVA_HOME环境变量,再将JAVA_HOME下的bin目录配置到Path系统变量中,否则会导致系统无法启动。
6)在“环境变量”“系统变量”窗口中修改“path”的值,添加Java可执行程序的安装路径,值为“%JAVA_HOME%\bin”,点击“确定”按钮保存修改。
7)测试JDK安装配置是否正确。
选择“开始”菜单->“运行”,键入“cmd”。
在控制台窗口中键入命令“java -version”,出现下图画面与所安装的JDK版本一致,说明JDK安装配置成功。
巡更系统调试设置说明
蓝卡巡更系统调试设置说明1、系统简介电子巡逻巡检系统是监督考核巡逻人员工作情况的智能管理系统,由感应式智能巡逻管理系统软件、巡检器和各种射频卡构成。
其基本的原理就是在巡逻线路上安装一系列代表不同地点的射频卡(又称感应卡),巡逻到各点时巡逻人员用手持式巡检器(相当于刷卡机)读卡,把代表该点的“卡号”和“读卡时间”同时记录下来。
巡逻完成后巡检器通过通讯线把数据传给计算机软件处理,就可以对巡逻情况(地点、时间等)进行记录和考核。
《智能巡逻06管理系统》06版本是一个综合性软件,此软件可以适用于我公司生产BP -2002、BP-2002B、BP-2002V、BP-2002S、BP-2002W巡检器及BS-1000通讯座、BS -2000数据采集器、BS-3000短信通讯座、BS-4000及BS-4000m通讯座。
同时也能使用BS-1000t的通讯座。
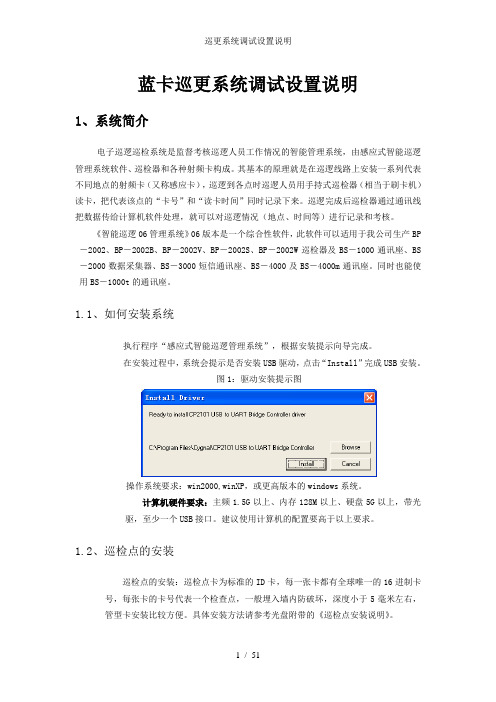
1.1、如何安装系统执行程序“感应式智能巡逻管理系统”,根据安装提示向导完成。
在安装过程中,系统会提示是否安装USB驱动,点击“Install”完成USB安装。
图1:驱动安装提示图操作系统要求:win2000,winXP,或更高版本的windows系统。
计算机硬件要求:主频1.5G以上、内存128M以上、硬盘5G以上,带光驱,至少一个USB接口。
建议使用计算机的配置要高于以上要求。
1.2、巡检点的安装巡检点的安装:巡检点卡为标准的ID卡,每一张卡都有全球唯一的16进制卡号,每张卡的卡号代表一个检查点,一般埋入墙内防破坏,深度小于5毫米左右,管型卡安装比较方便。
具体安装方法请参考光盘附带的《巡检点安装说明》。
1.3、巡检器的使用BP-2002S:BP-2002S的巡检器只需要把巡检器前端靠近信息钮,距离在1.5~5cm之内,巡检器会自动探测并读取数据。
当巡检器的发出一声短鸣,并伴随红色指示灯闪烁四次,即表示为读卡成功。
BP-2002、BP-2002W:BP-2002、BP-2002W、的巡检器读卡在巡检器中上方上有一小按键,按此键即可开机,按住键就可以刷卡。
爱登堡门机调试说明书ams新

目录第一章门机的电气安装与配线 (1)第二章调试过程 (2)第三章门机运行曲线 (5)第四章故障及对策 (6)第五章门机保养维护 (7)第一章 门机电控系统的电气安装与配线1.1系统构成门机电控系统简图见图1-1。
系统包括爱默生TD3200门机专用变频器一台,变频三相异步电动机一台,脉冲编码器一只。
1.3 输入信号:a. 开门信号,当OD 和COM 端接通将送给控制器开门信号b. 关门信号,当CD 和COM 端接通将送给控制器关门信号c. 光幕常开信号与挡板常开信号输入。
输出继电器:a. 开门到位SKW ,当门完全打开时,开门到位输出指示灯亮,继电器吸合b. 关门到位SGW ,当门完全关闭时,关门到位输出指示灯亮,继电器吸合 [继电器输出:250V AC/2A(cos Ф=1),250V AC/1A(cos Ф=0.4),30VDC/1A]第二章 调试过程1.2. 调节变频器参数(变频器参数设置具体见变频器使用说明书)在调试过程中的主要用到的参数设定见表2-1。
表2-1调试前应先将电机铭牌上的参数:额定电压,额定电流,额定频率,额定功率,额定转速记录下来。
然后将各接线与接线图对照详细核对一遍。
在确认无误情况下,上电。
3. 变频器上电,设置F123=2,恢复出厂参数。
4. 确认功能码F002=0。
选择通用变频器的面板控制模式,脱开门机负载,正确输入电机铭牌参数,设置F075=1,确认后按RUN键启动电机参数调谐,直至调谐完成。
电机调谐完成后参数自动保存。
表2-25.下电后并恢复门机机械系统,后上电。
6.设置参数F002=2, 选择门机手动调试模式,按照表1-2中推荐的参数进行设置,同时按RUN键和对变频器参数进行调整。
7.调试完成后,设置功能码F002=1,选择门机端子控制模式,此时门机变频器可以在控制系统的控制下正常工作,在工作过程中,按照实际运行的情况再对开门运行曲线参数和关门运行曲线参数进行合理调整,直到能够安全平稳的运行。
SIMOTION D系统组态及调试入门
而作为控制系统的工程工具,SCOUT 除了能实现以上功能外,还能进行以下工作: • 轴控制参数的设定 包括轴的机械参数、回零点方式及运动性能参数的设定。 • 控制程序编辑 包括运动控制、逻辑控制以及工艺控制。运动控制任务的图形化编程运动控制图 (MCC) 可以以流程图的方式对机器程序顺序进行图形化编程。程序也可以用LAD及FBD编程。 对于复杂的逻辑控制、数学运算及运动控制还可以用ST结构化编程语言进行编程。这 三种编程方式均集成在SIMOTION SCOUT软件中。
SIMOTION 特别关注其 SCOUT 工程开发系统的用户友好性。 运动控制、逻辑控制与工艺控制 的工程开发,以及驱动器的组态与调试,均是由一个系统完成的。 实际上所有任务的处理均 可用图形方式完成,包括组态、编程、测试及调试。 友好的用户提示信息,实用的帮助功 能,自动的检查功能简化了任务的完成过程,特别适合于第一次编制运动控制程序的用户。 SCOUT 的所有工具均被集成在一起,并具有统一的形式。
SIMOTION D 系统组态及调试入门
SIMOTION D System Configuration And Commissioning Getting Start
快速入门
Edition 03/ 2007
摘要 本文介绍了 SIMOTION D 运动控制系统项目的建立、系统调试及运动控制程序的编写。 关键词 SIMOTION D 运动控制系统、项目建立、调试、编程 Key words SIMOTION D Motion Control System、Create Project、Program
D06调试软件说明
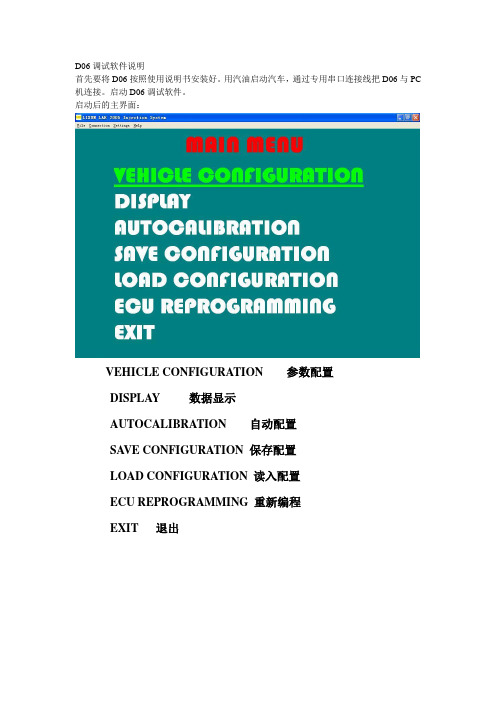
D06调试软件说明首先要将D06按照使用说明书安装好。
用汽油启动汽车,通过专用串口连接线把D06与PC 机连接。
启动D06调试软件。
启动后的主界面:VEHICLE CONFIGURATION 参数配置DISPLAY 数据显示AUTOCALIBRATION 自动配置SA VE CONFIGURATION 保存配置LOAD CONFIGURATION 读入配置ECU REPROGRAMMING 重新编程EXIT 退出选择语言,操作如下图:进入VEHICLE CONFIGUNATION 菜单,内部有F1、F2、F3、F4四张表格。
F1表格的内容如下图:Fuel type 燃料类型默认状态:LPG (液化气)选择项:Methane (天然气)Inj. 喷射的方式默认状态:Sequential (顺序喷射)选择项:Full Group (分组喷射)Injectors 喷嘴类型默认状态:Omvl FAST选择项:Omvl STDReducer:减压器类型燃料类型选择为Methane时,就没有此选项默认状态:STD选择项:MP选择项:HPType of revolution signal 转速信号的类型默认状态:Standard选择项:WeakNo. of cylinders 汽缸数默认状态:4 Cylinders选择项:3 CylindersIgnition type 线圈类型默认状态:Two coils选择项:One coil选择项:RPM sensor选择项:RPM sensor2Type of change over 转换类型默认状态:In acceleration选择项:IN DECELERTIONREV. THRESHOLD FOR CHANG-OVER 转换的转速默认状态:1600选择项:800—3000REDUCER TEMPERATURE FOR CHANGE-OVER 转换时的减压器温度默认状态:30CHANG-OVER FROM PETROL-GAS DELAY 转换时的油气延时默认状态:40S选择项:25—250SRESET ECU AND GO TO BASE PARAMETERS 复位ECU到初始状态F2表格内容如下图:TYPE OF LAMBDA PROBE 氧传感器的类型默认状态:0—1VOLT选择项:5—0VOLT选择项:0—5VOLT选择项:0.8—1.6VOLTNUMBER OF AHEAD LAMBDA PROBES 氧传感器的数量默认状态:1选择项:1或2 如果选择2将会出现下一项FUEL TRIM BANK2默认状态为:0选择项:-20—+20TYPE OF MAP SENSOR MAP传感器的类型默认状态:AEB 025选择项:AEB 013TYPE OF GAS LEVEL SENSOR 液为位传感器的类型默认状态:AEB选择项:0—90 OHM选择项:NOT STANDARD 不标准的传感器,可以自己调整里面的数据。
通力通力调试资料(带6菜单)

基本设置故障代码表V3f25调试指南一:概要调试指南仅用于v3f25驱动模块 713990REV2。
0该驱动模块在出厂前已经过测试,并预设基本调节1.1安全与健康1.2 工具 数字万用表/测试法码1。
3 参考资料am —1。
1.30—b tc04807wl —en.tc04807w2—en so-11。
65。
09-6 as-11.65。
01-a as-11。
65。
08-a1.4 操作界面: Lce 软件必须是 3.3 相当于(chinaMAX1。
4) 或以上版本,V3f25参数在Lce 菜单6中,其操作方法与其它菜单相似,更改Lce 菜单6中参数必须在Rdf 模式下进行,读取或更改完菜单6的参数后记隹退出菜单6。
更改后就参数就起作用,但断电后丢失.用菜单6—99永久保存参数。
1。
5 V3f25组成 V3F25包括:-Hcb :运动控制板385:A1(High speed motion controlboard)—逆变板385A2:(Lnverter board)—CMB:电流测量板385:A3(Current measure board)—风扃303—变压器89-中间直流电路电容器385:c1,c2,(c3,c4)—大功率晶体管385:v1—v3—制动三极管385:v4(Braking Transistor)-二极管整流桥385:v5(Diode Bridge)-制动电阻306只用于40A的v3f25中1.6 385:Al hcb板在此板上RDIR插针有两个,不能少(不论是水平或是垂直), 将两针都旋转90度就可以改变旋转娈压器的极性.1.7 385:A2 lnverter board 逆变板二驱动系统/马达设定:确保am—1。
1.30的19.2章所列项目己检查完成2。
1检查连接插:tacho测速计(xg1,xg2;屏蔽线接到左侧板),resolver旋转变压(xr),lwd(xw接电阻2—10k)2。
蓝卡巡更系统调试设置说明模板

蓝卡巡更系统调试设置说明蓝卡巡更系统调试设置说明1、系统简介系统简介电子巡逻巡检系统是监督考核巡逻人员工作情况的智能管理系统,由感应式智能巡逻管理系统软件、巡检器和各种射频卡构成。
其基本的原理就是在巡逻线路上安装一系列代表不同地点的射频卡(又称感应卡),巡逻到各点时巡逻人员用手持式巡检器(相当于刷卡机)读卡,把代表该点的“卡号”和“读卡时间”同时记录下来。
巡逻完成后巡检器通过通讯线把数据传给计算机软件处理,就可以对巡逻情况(地点、时间等)进行记录和考核。
《智能巡逻06管理系统》06版本是一个综合性软件,此软件可以适用于我公司生产BP -2002、BP-2002B、BP-2002V、BP-2002S、BP-2002W 巡检器及BS-1000通讯座、BS -2000数据采集器、BS-3000短信通讯座、BS-4000及BS-4000m 通讯座。
同时也能使用BS-1000t 的通讯座。
1.1、如何安装系统执行程序“感应式智能巡逻管理系统”,根据安装提示向导完成。
在安装过程中,系统会提示是否安装USB 驱动,点击“Install”完成USB 安装。
图1:驱动安装提示图操作系统要求:win2000,winXP,或更高版本的windows 系统。
计算机硬件要求计算机硬件要求::主频1.5G 以上、内存128M 以上、硬盘5G 以上,带光驱,至少一个USB 接口。
建议使用计算机的配置要高于以上要求。
1.2、巡检点的安装巡检点的安装:巡检点卡为标准的ID 卡,每一张卡都有全球唯一的16进制卡号,每张卡的卡号代表一个检查点,一般埋入墙内防破坏,深度小于5毫米左右,管型卡安装比较方便。
具体安装方法请参考光盘附带的《巡检点安装说明》。
1.3、巡检器的使用BP BP--2002S:2002S:BP-2002S 的巡检器只需要把巡检器前端靠近信息钮,距离在1.5~5cm 之内,巡检器会自动探测并读取数据。
当巡检器的发出一声短鸣,并伴随红色指示灯闪烁四次,即表示为读卡成功。
吉泰科调试说明简单版

吉泰科伺服配调试步骤1、电机参数的辨识:A、保证电机在空载的情况下,做电机参数辨识;B、必须在键盘控制方式下,才能进行电机参数辨识,即B1-00=0C、需要设置的参数为:A0-09=03、B0-08=100.0(需要大于电机的额定频率)、B0-09=100.0(需要大于电机的额定频率)、D0-00=2、D0-01------D0-06按电机的铭牌设置、D2-01=0.3、D2-02=0.03、D2-03=0.3、D2-04=0.03、D6-00=01、D6-06=1、D6-07=1024,D6-08=0或1(学习通不过时改成1);D、把D0-22=3,然后按键盘上的“RUN”进行参数辨识,辨识结束后能自动结束运行,并且辨识出的结果会保存在D0-20的参数内;E、如果参数辨识无法通过,在保证上述参数正确的情况下,可以把D0-19=100.0(辨识电流更改为100.0%),再次重新做步骤“D”的操作;如果还是无法通过辨识,可以把D6-08=1再重新做步骤“D”的操作;查看电机方向是否正确,如果相反,调换电线,重新C-D步骤;F、如果还是无法通过辨识,需要检查编码器的接线,可以手动旋转电机,观察U0-28参数的变化,正常的参数应该是从“0”---“1023”变化,电机旋转一圈,U0-28从“0—1023”变化一次;而且还是无法确定编码是否有问题,可以在开环方式下运行,检查反馈脉冲,来判断反馈是否正常,把A0-09=0,B0-02=50.0,F4-00=0,B1-00=0,通过驱动器键盘“RUN”键运行驱动器,使驱动器运行在“50.0”HZ,观察U0-26的反馈值,正常的反馈频率为:50.0(运行频率)/(电机极数*2)*1024/1000,如果反馈频率正常,则编码器反馈是正常的。
G、设置其他参数。
2、电机温度保护的设置:电机温度保护可以采用直接接到“AI2”、“GND”端子,需要把控制板上“S4”拨码开关拨到“MTP”端,见上图说明,参数设置为,D0-23=2,D0-25=1,D0-26=7.0;如果电机温度保护线,和编码器线一起走线,可以接到PG卡上的“DB15”的头上,接线端子为“7”、“1”端子,端子没有正反,需要把PG卡上“S2”的拨码开关拨到“MTMP”端,见上图;参数设置为:D0-23=2,D0-25=? ,D0-26=3.0 (需要更新软件后才能实现)。
安川伺服驱动器软件使用

安川伺服驱动器软件使用1.配置驱动器参数:用户可以通过软件来设置伺服驱动器的各种参数,例如速度、加速度、位置限制等。
这样就能够根据具体的应用要求来调整驱动器的性能和特性,从而实现更精确的控制。
2.监测驱动器状态:软件能够实时监测驱动器的运行状态,例如转速、电流、功率等。
用户可以通过软件中的图表、曲线和报表等形式来查看驱动器的运行情况,从而判断是否存在异常或者需要调整的地方。
3.调试和故障诊断:如果驱动器出现运行故障或者不正常的情况,用户可以通过软件来进行调试和故障诊断。
软件提供了多种工具和方法,例如参数设置、命令输入、日志记录等,可以帮助用户快速定位和解决问题。
4.数据记录和分析:软件还可以记录驱动器的运行数据,包括各种传感器和指标的数值。
通过对这些数据进行分析和处理,用户可以了解驱动器的工作情况和性能表现,从而优化控制系统的设计和运行。
为了使用安川伺服驱动器软件,用户需要首先安装软件并连接到伺服驱动器。
通常情况下,软件会提供一个用户界面,用户可以通过该界面来进行相关配置、操作和监测。
界面通常包括一些图形化元素,例如按钮、滑块、图表等,以便用户直观地进行操作和查看信息。
在使用软件的过程中1.参数设置:在配置驱动器参数时,用户需要了解各个参数的含义和作用,以便正确地进行设置。
参数的调整通常需要根据实际情况来进行,例如输出功率、负载要求等。
2.监测状态:用户可以定期监测驱动器的运行状态,以便及时发现并解决问题。
特别是对于一些关键的指标和参数,用户可以设置报警功能,当超出预设范围时,软件会自动提醒。
3.故障处理:当驱动器出现故障或者不正常的情况时,用户可以使用软件进行调试和故障诊断。
软件通常提供了一些工具和方法,例如远程控制、日志记录等,可以辅助用户进行故障处理。
4.数据处理和分析:对于记录的运行数据,用户可以使用软件进行分析和处理。
例如,可以绘制曲线图、对数据进行统计分析等,以便更好地了解驱动器工作情况,并做出相应的优化和改进。
2024版年度Dynalite邦奇智能照明设备调试实验教程

•设备概述与准备工作•硬件安装与连接•软件配置与编程•功能测试与验证目•故障诊断与排除方法•总结与展望录Dynalite邦奇智能照明系统简介该系统通过中央控制器、调光器、传感器等设备,实现对灯光的远程控制、定时控制、场景设置等功能,旨在提供舒适、节能的照明环境。
中央控制器调光器传感器030201电源适配器网络通信设备01 02 03调试前准备工作安全注意事项象。
A B C D照明设备布局规划根据实际需求和环境条件,合理规划照明设备的布局,包括灯具类型、数量、位置和照射角度等。
考虑照明设备的功率、光通量、色温、显色指数等参数,以满足不同场景的照明需求。
避免过度照明和眩光,提高照明舒适度和节能效果。
电源线及信号线连接方法根据设备规格和安装要求,选择合适的电源线和信号线,确保线路安全、稳定和可靠。
按照接线图正确连接电源线和信号线,注意区分火线、零线和地线,以及信号线的正负极。
使用合适的接线端子和绝缘材料,确保接线牢固、不松动,并防止短路和漏电等安全隐患。
控制器与传感器安装位置选择010203设备无法正常工作检查电源线和信号线连接是否正确、牢固,以及设备是否损坏或故障。
照明效果不理想调整灯具位置、照射角度和光源参数等,以改善照明效果。
控制器或传感器失灵检查设备是否损坏或故障,以及信号传输是否受到干扰或阻断。
系统不稳定或出现故障检查系统配置和参数设置是否正确,以及是否存在硬件故障或软件漏洞等问题。
调试过程中常见问题及解决方案软件安装及界面介绍软件下载与安装软件界面介绍软件界面包括菜单栏、工具栏、设备列表、属性窗口和日志窗口等部分,方便用户进行各种操作。
设备地址分配与设置方法设备地址分配设备地址设置方法场景模式配置流程场景模式介绍场景模式是智能照明系统中的重要功能,可以根据不同的需求设置不同的场景。
场景模式配置流程在软件中创建新的场景模式,选择需要控制的设备和灯具,设置亮度、色温等参数,保存并应用到实际场景中。
(2020年整理)D06调试软件说明.pptx

PRESS GAS 表示当前燃气的压力
MAP
表示当前 MAP 的压力
SENSOR AEB 025 表示当前的压差传感器
LAMBDE
表示当前的氧传感器电压
LEVEL 表示当前的燃料的剩余量
数据显示:
学海无 涯
默认状态: LPG (液化气) 选择项 : Methane (天然气)
Inj. 喷射的方式
默认状态:Sequential (顺序喷射) 选择项 :Full Group (分组喷射)
Injectors 喷嘴类型
默认状态:Omvl FAST 选择项 :Omvl STD
Reducer:减压器类型 燃料类型选择为 Methane 时,就没有此选项
注意:每个图片最下面的几排数据是表示当前的实际值。
PETROL 表示当前的燃料为汽油 GAS 表示当前的燃料为天然气或液化气
REVS T 表示当前的发动机转速
.GAS 表示当前的燃料温度 T.REDUCER 表示当前的减压器的水温
TINJ.GAS 表示当前的喷嘴的喷气时间
TINJ.PETROL 表示当前的喷油时间
默认状态: STD 选 择 项 :MP 选择项 :HP
Type of revolution signal
默认状态:Standard 选择项 :Weak
转速信号的类型
No. of cylinders 汽缸数
默认状态:4 Cylinders 选择项 :3 Cylinders
Ignition type 线圈类型
RESET ECU AND GO TO BASE PARAMETERS
复位ECU 到初
始状态
F2 表格内容如下图:
TYPE OF LAMBDA PROBE 氧传感器的类型 默认状态:0—1VOLT 选择项 :5—0VOLT 选择项 :0—5VOLT
台达PLC通讯调试方法
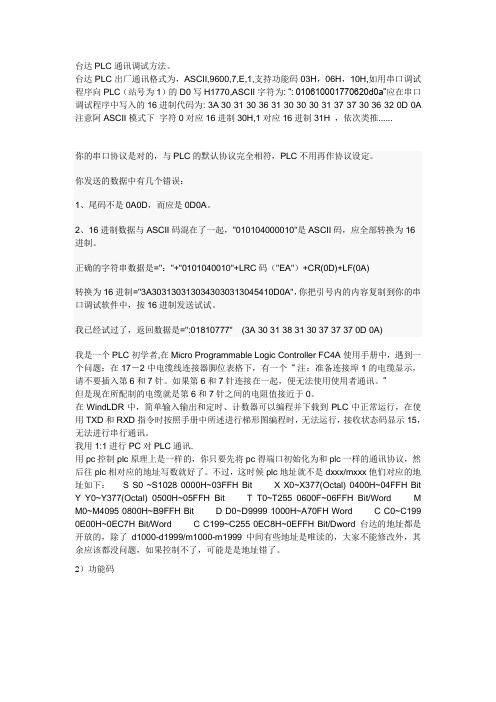
台达PLC通讯调试方法。
台达PLC出厂通讯格式为,ASCII,9600,7,E,1,支持功能码03H,06H,10H,如用串口调试程序向PLC(站号为1)的D0写H1770,ASCII字符为: “: 010610001770620d0a”应在串口调试程序中写入的16进制代码为: 3A 30 31 30 36 31 30 30 30 31 37 37 30 36 32 0D 0A 注意阿ASCII模式下字符0对应16进制30H,1对应16进制31H ,依次类推......你的串口协议是对的,与PLC的默认协议完全相符,PLC不用再作协议设定。
你发送的数据中有几个错误:1、尾码不是0A0D,而应是0D0A。
2、16进制数据与ASCII码混在了一起,"010*********"是ASCII码,应全部转换为16进制。
正确的字符串数据是=":"+"010*******"+LRC码("EA")+CR(0D)+LF(0A)转换为16进制="3A3031303130343030313045410D0A",你把引号内的内容复制到你的串口调试软件中,按16进制发送试试。
我已经试过了,返回数据是=":01810777" (3A 30 31 38 31 30 37 37 37 0D 0A)我是一个PLC初学者,在Micro Programmable Logic Controller FC4A使用手册中,遇到一个问题:在17-2中电缆线连接器脚位表格下,有一个“注:准备连接埠1的电缆显示,请不要插入第6和7针。
如果第6和7针连接在一起,便无法使用使用者通讯。
”但是现在所配制的电缆就是第6和7针之间的电阻值接近于0。
在WindLDR中,简单输入输出和定时、计数器可以编程并下载到PLC中正常运行,在使用TXD和RXD指令时按照手册中所述进行梯形图编程时,无法运行,接收状态码显示15,无法进行串行通讯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D06调试软件说明
首先要将D06按照使用说明书安装好。
用汽油启动汽车,通过专用串口连接线把D06与PC 机连接。
启动D06调试软件。
启动后的主界面:
VEHICLE CONFIGURATION 参数配置
DISPLAY 数据显示
AUTOCALIBRATION 自动配置
SAVE CONFIGURATION 保存配置
LOAD CONFIGURATION 读入配置
ECU REPROGRAMMING 重新编程
EXIT 退出
选择语言,操作如下图:
进入VEHICLE CONFIGUNATION 菜单,内部有F1、F2、F3、F4四张表格。
F1表格的内容如下图:
Fuel type 燃料类型
默认状态:LPG (液化气)
选择项:Methane (天然气)
Inj. 喷射的方式
默认状态:Sequential (顺序喷射)
选择项:Full Group (分组喷射)
Injectors 喷嘴类型
默认状态:Omvl FAST
选择项:Omvl STD
Reducer:减压器类型燃料类型选择为Methane时,就没有此选项默认状态:STD
选择项:MP
选择项:HP
Type of revolution signal 转速信号的类型
默认状态:Standard
选择项:Weak
No. of cylinders 汽缸数
默认状态:4 Cylinders
选择项:3 Cylinders
Ignition type 线圈类型
默认状态:Two coils
选择项:One coil
选择项:RPM sensor
选择项:RPM sensor2
Type of change over 转换类型
默认状态:In acceleration
选择项:IN DECELERTION
REV. THRESHOLD FOR CHANG-OVER 转换的转速
默认状态:1600
选择项:800—3000
REDUCER TEMPERATURE FOR CHANGE-OVER 转换时的减压器温度
默认状态:30
选择项:20—90
CHANG-OVER FROM PETROL-GAS DELAY 转换时的油气延时默认状态:40S
选择项:25—250S
RESET ECU AND GO TO BASE PARAMETERS 复位ECU到初始状态
F2表格内容如下图:
TYPE OF LAMBDA PROBE 氧传感器的类型
默认状态:0—1VOLT
选择项:5—0VOLT
选择项:0—5VOLT
选择项:0.8—1.6VOLT
NUMBER OF AHEAD LAMBDA PROBES 氧传感器的数量
默认状态:1
选择项:1或2 如果选择2将会出现下一项
FUEL TRIM BANK2
默认状态为:0
选择项:-20—+20
F3表格的内容如下图:
TYPE OF MAP SENSOR MAP传感器的类型
默认状态:AEB 025
选择项:AEB 013
TYPE OF GAS LEVEL SENSOR 液为位传感器的类型
默认状态:AEB
选择项:0—90 OHM
选择项:NOT STANDARD 不标准的传感器,可以自己调整里面的数据。
选择项:NOT STANDARD INVERTED 不标准的反向的传感器。
F4表格的内容如下图:
MANUAL CARBURATION ADJUSTMENT(±50%)手动调节混合比IDLE 怠速OUT OF IDLE 离开怠速VERY LOW LOAD
LOW LOAD
MIDDLE LOAD
HIGTH LOAD
EXTRAINJ.SENSITIVENNESS
ENRICHMENT IN ACCELERATION 加速时加大进气量WEAKENING ON MAZDA
注意:每个图片最下面的几排数据是表示当前的实际值。
PETROL 表示当前的燃料为汽油
GAS 表示当前的燃料为天然气或液化气
REVS 表示当前的发动机转速
T.GAS 表示当前的燃料温度
T.REDUCER 表示当前的减压器的水温
TINJ.GAS 表示当前的喷嘴的喷气时间
TINJ.PETROL 表示当前的喷油时间
PRESS GAS 表示当前燃气的压力
MAP 表示当前MAP 的压力
SENSOR AEB 025 表示当前的压差传感器
LAMBDE 表示当前的氧传感器电压
LEVEL 表示当前的燃料的剩余量
数据显示:
(此文档部分内容来源于网络,如有侵权请告知删除,文档可自行编辑修改内容,
供参考,感谢您的配合和支持)。