2-拉氏变换
拉氏变换
6
63 s3
et 7e2t 6e3t
(2). 包含有共轭极点的情况 1,2
例2 求
F(s)
s1 s(s2 s 1)
的拉氏反变换。
13
s1 0,
s2,3
2
j
2
s1
s1
F(s)
s(s2
s 1)
s s
1 2
LLL111sss111aaaeeeaaatt t,,, LLL111sss111aaaeeeaaatt t,,,
LLL111sss222222sssiiinnnttt,,, LLL111sss222sss222cccooosssttt
1
1
s 1 s2 1
sa 1
s a2
s2 2
序号
f(t)
7
cos(t)
8
t n (n 1,2,3, )
9
t neat (n 1,2,3, )
10
1 eat ebt
ba
11
1 bebt aeat
ba
12
1 ab
1
a
1
j
3 2
1
由此得:
1 1
2 0
s1
A
s(s2
s
1)
s s0
1
s1
s
1
F(s)
s(s2
s 1)
s
1 2
j
3 2
s
拉氏变换求法2-2

3t t 2)ℒ e f ( ) 2
解 1) ℒ
1 s ℒ f (2t ) F ( ) 2 2
由延迟性质
ℒ f (2(t 2))u(t 2) f (2t 4)u(t 2)
1 2 s s e F( ) 2 2 t 2)ℒ f ( ) 2F (2s) 由位移性质 2
解 因为
k ℒ sin k t 2 s k2 n! t ℒ s n 1
n
所以
ℒ e
at
k sin kt ( s a)2 k 2
n! at n ℒ e t ( s a)n 1
例3
若 F ( s) = ℒ f (t ) 求 1)ℒ f (2t 4)u(t 2)
例
解
求
0
0
sin t dt t
0
e at e bt dt t
0
1 sin t ds arctan s dt 0 2 s 1 t
2 e bt [ e e ]ds ℒ 0 dt t
d 1 ℒ t sin t ( 2 ) ds s 1
2s 2 2 ( s 1)
ℒ te
2t
2( s 2) sin t (( s 2) 2 1) 2 2( s 2) 2 2 s(( s 2) 1)
t te2t sin tdt ℒ 0
Fn ( s)
注:卷积公式可用来计算逆变换或卷积.
例1:求 ℒ 1[
1 F1 ( s ) 2 s
1
1 ] 2 2 s (1 s )
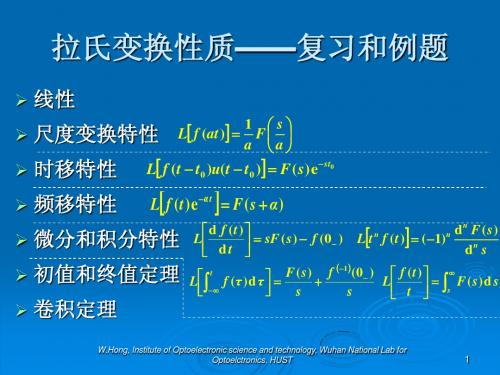
拉氏变换基本性质

F(s) F1(s) 1 esT 0
例:周期信号的拉氏变换
LT
f1(t) F1(s)
第一周期的拉氏变换
LT
利用时移特性
f1(t nT ) esnT F1(s)
LT
f (t nT ) F1(s) eSnT
n0
n0
1
F1(s) eST
利用无穷递减等比 级数求和 s a1
1- q
例1:求全波整流周期信号的拉氏变换
设f (t) sint
sin 0t u(t)
t 0
sin0t u(t t0)
t 0 t0
sin0(t t0) u(t)
0 t0
t
sin0(t t0)u(t t0)
t 0 t0
3.时移特性的应用p250.4-2 (1)
sin t 0 t T
1. f (t)
2
0 t为其它值时
解: f (t) sin t[u(t) u(t T )] 2
s 0 dt
s
f (0) f (0 ) f (0 ) lim sF(s) s
再假定f(t)在原点有跃变,则f(t)的导数可写成
df df1 [ f (0 ) f (0 )](t) dt dt
t0
其中f 1(t)在t=0连续,于是
lim df (t) est dt lim df1 est dt
采用 0 系统还是采用 0 系统,所求得的初值
总是 f (0 )
b.若F(s)是有理代数式,则F(s)必须是真分式 即F(s)分子的阶次应低于分母的阶次,若不是 真分式,则应用长除法,使F(s)中出现真分式,而 初值f (0) 等于真分式F0(s) 逆变换f 0(t) . c.物理解释:s ( j ) 相当于接入信
拉氏变换及拉氏反变换

t dt 1 ,且δ(t)有如下
t f t dt f 0
式中f(0)——t=0时刻的f(t)的函数值。
由拉氏变换的定义得
L t t e st dt e st
0
t 0
1
2.2.2 几种典型函数的拉氏变换
L f at
1 s F a a
2.2.3 拉氏变换主要定理
微分定理
设f(n)(t)表示f(t)的n阶导数,n=1,2,3,……正整数, f(t)的拉氏变换为F(s),则
L f t s F s sf 0 f 0
F s
s 1 s 1 k k 1 2 s 2 5s 6 s 2s 3 s 2 s 3
s 1 s 2 s 1 1 k1 s 2s 3 s 2 s 3 s 2 s 1 s 3 s 1 2 k2 s 2s 3 s 3 s 2 s 3 2 1 1 1 2 f t L1 F s L1 L1 L 2e 3t e 2t s 2 s 3 s 2 s 3
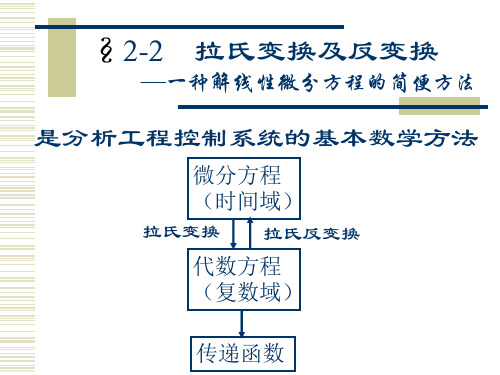
拉氏变换亦与此相似,即把微分方程变换为代数方程 求解。
2.2.1 拉氏变换的定义
定义
对于时间函数f(t),如果满足
当t<0时,f(t)=0; 当t≥0时,实函数f(t)的积分
f t e
0
st
dt 在s的某一域内收敛,则定义f(t)的拉氏变换
为
F s f t e st dt
拉氏变换
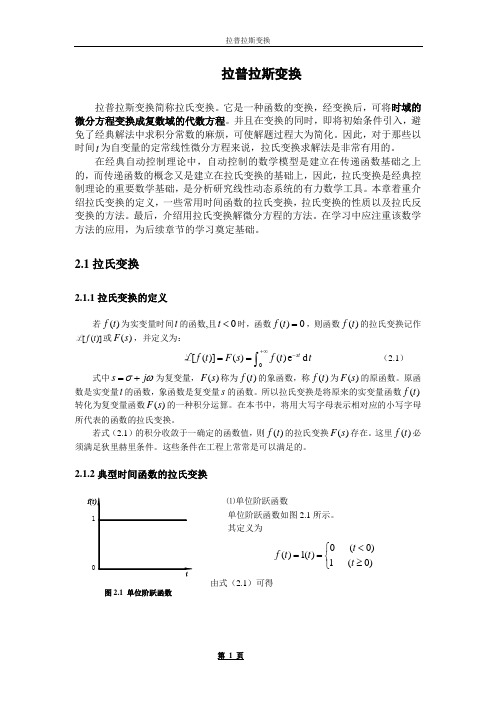
拉普拉斯变换拉普拉斯变换简称拉氏变换。
它是一种函数的变换,经变换后,可将时域的微分方程变换成复数域的代数方程。
并且在变换的同时,即将初始条件引入,避免了经典解法中求积分常数的麻烦,可使解题过程大为简化。
因此,对于那些以时间t 为自变量的定常线性微分方程来说,拉氏变换求解法是非常有用的。
在经典自动控制理论中,自动控制的数学模型是建立在传递函数基础之上的,而传递函数的概念又是建立在拉氏变换的基础上,因此,拉氏变换是经典控制理论的重要数学基础,是分析研究线性动态系统的有力数学工具。
本章着重介绍拉氏变换的定义,一些常用时间函数的拉氏变换,拉氏变换的性质以及拉氏反变换的方法。
最后,介绍用拉氏变换解微分方程的方法。
在学习中应注重该数学方法的应用,为后续章节的学习奠定基础。
2.1拉氏变换2.1.1拉氏变换的定义若()f t 为实变量时间t 的函数,且0t <时,函数()0f t =,则函数()f t 的拉氏变换记作[()]f t L 或)(s F ,并定义为:[()]()()e dL stf t F s f t t +∞-==⎰(2.1) 式中s j σω=+为复变量,()F s 称为()f t 的象函数,称()f t 为()F s 的原函数。
原函数是实变量t 的函数,象函数是复变量s 的函数。
所以拉氏变换是将原来的实变量函数()f t 转化为复变量函数()F s 的一种积分运算。
在本书中,将用大写字母表示相对应的小写字母所代表的函数的拉氏变换。
必e 1[1()]1e d L st stt t ss+∞-+∞-=⋅=-=⎰(2.2) 在自动控制系统中,单位阶跃函数相当于一个实加作用信号,如开关的闭合(或断开),加(减)负载等。
⑵单位脉冲函数单位脉冲函数如图2.2所示。
其定义为()0t t t δ∞=⎧=⎨≠⎩ 同时,()d 1t t δ+∞=⎰,即脉冲面积为1。
而且有如下特性:()()d (0)t f t t f δ+∞-∞⋅=⎰(0)f 为()f t 在0t =时刻的函数值。
第二章附录-拉氏变换
例3 : y(3) 3y 3y y 1, y(0) y(0) y(0) 0 求微分方程.
F (s)
1 s(s 1)3
b3 (s 1)3
b2 (s 1)2
b1 s 1
c4 s
b3
[
s(s
1 1)3
(s
1)3 ]s1
1
b2
d
ds
[
s(s
1 1)3
(s
1)3
]
s1
[d ds
(
1 s
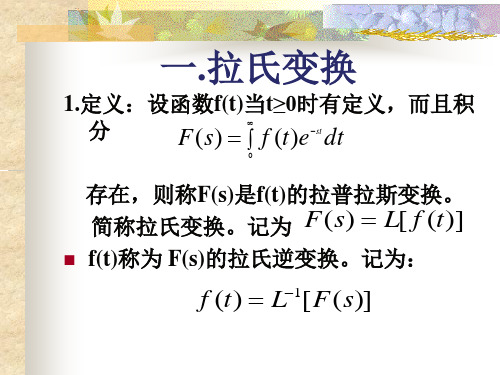
一.拉氏变换
1.定义:设函数f(t)当t≥0时有定义,而且积
分
F (s) f (t)est dt
0
存在,则称F(s)是f(t)的拉普拉斯变换。
简称拉氏变换。记为 F (s) L[ f (t)]
f(t)称为 F(s)的拉氏逆变换。记为:
f (t) L1[F (s)]
2.常用函数的拉氏变换
单位阶跃函数1(t) f(t)
ci是常数
M (s) ci [ D(s) (s pi )]s pi
例1: F(s)
1
(s 1)(s 2)(s 3)
c1 c2 c3 s 1 s 2 s 3
c1
[ (s
1)(s
1 2)(s
3)
(s
1)]s 1
1 6
1
1
c2
[ (s
1)(s
2)(s
3)
(s
2)]s2
15
c3
[ (s
证:
a L[ f ( t )] f ( t )est dt
a 0a
令t / a ,则原式 f ( )esa ad aF(as)
0
(8)卷积定理
控制工程_2拉氏变换

变
令u st t u , dt 1 du
换
s
s
及 其
L[tn ] un e u 1 du
0 sn
s
反 变
1 s n1
un
0
e udu
换
1
n!
Γ(n 1)
s n1
s n1
拉 典型时间函数的拉氏变换
普
拉
1. 单位阶跃函数 u(t)=1
(t ≥0)
1
s
斯 2. 单位脉冲函数δ(t)
sin t est dt
1
e jt e jt
e st dt
0
0 2j
其 反
1 2j
0
e
(s
jt
)
dt
e
(s
jt
)
dt
0
1 2j
s
1 j
s
1 j
变
s2 2
换 同理也可得: Lcost s
s2 2
拉 • 幂函数 t n 普
tn
n! sn1
拉 斯
L[tn ] t n e st dt
6K1 3K2 2K3 51
K1 5
K
2
3
K
3
6
换
(2)F(s)=
(s2
20(s 2s
1)(s 3) 2)(s 2)(s
4)
对于有共轭复根的分式有两种处理方法: a. 该部分分式的系数仍可由前面的方法求得; b. 可对该部分分式的分母用配方法后再用查表法。
8s s2
14 2s
变 换
7. 余弦函数cos ωt
8. 幂函数 tn
拉 • 单位阶跃函数 u(t) 1 1
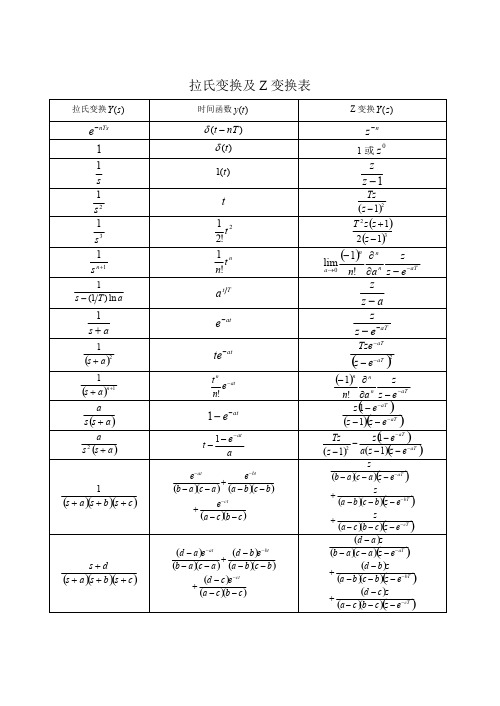
拉氏变换及Z变换表
c b e b c e a b c a te at
bt
2
at
c b z b c z
s s b s a
s a s b b a s c s a s b
ab s s a s b
ba
e at e bt
c a e at b c e bt
1 be ae ab ab
at bt
c a z b c z
z
2
2z aTe aT z aT 2 ze z e aT
a b s b s a 2 a b s c s b s a 2
2
a b Te aT z z z 2 z e bT z e aT z e aT
拉氏变换及 Z 变换表
拉氏变换 Y ( s ) 时间函数 y (t ) Z 变换 Y ( z )
e nTs
(t nT )
(t )
1(t )
z n
1或z
0
1
1 s 1 s2 1 s3 1 s n 1
1 s (1 T ) ln a
z z 1
T 2 z z 1 3 2z 1
abc s s a s b s c
1
b a c a
ab
bc
e at
c b a b
ca
e bt
a c b c
02第二章拉氏变换的数学方法(第二讲)
L[sin t 1(t )] L[
e
j t
e 2j
j t
1(t )]
1 1 1 2 2 2 j s j s j s
2.2 拉氏变换的性质
2 微分定理 L[ dx(t ) ] sX ( s ) x (0 ) dt 推论: n d (1)L[ x (t )] s n X ( s ) s n 1 x (0 ) s n 2 x (0 ) n dt
x(t) x(t)
as
X (s)
t a
t
L[sin (t 4) 1(t 4)] e
4 s
s
2 2
2.2 拉氏变换的性质 例:求如下图的拉氏变换。
f (t ) f1 (t ) f 2 (t ) E 1(t ) E 1(t t 0 )
L[ f (t )] E s e
2 st
t0 t0
0
0
te dt
st
s
e
st
0
0
s
dt
1 单位速度函数
t
2.1.1 简单函数的拉氏变换
7 单位加速度函数
0 x (t ) 1 2 2 t
t0 t0
x(t)
L x (t ) 1(t ) 1 s
3
1 2
0
(2)在零初始条件下
s
2
x n (0 ) s
n
L[ x (t )( dt ) ]
n
X (s) s
2.2 拉氏变换的性质
4 衰减定理 例:已知
2 拉氏变换

12 V
比 较
实际 位置
负载
n k ud
120° 转角
u2
电位器
角度传感器
反 馈
教材:p320
22
直流电机位置控制系统
功率放大器
23
24
4
质量-弹簧-阻尼系统 质量-弹簧-阻尼系统
m d2 d x o ( t ) B x o t Kx o t f i t dt 2 dt
u (t )
Model
u (t )
AND
y (t )
物理系统
假 设
数学模型 计算机
输入量
系统
输出量
数学 分析
仿真
模型 改进 系统结构 预测
给定元件
响应
比较元件
控制元件
扰动量 控制量
执行元件 被控对象
输出量 (被控量)
物理系统的 期望响应 修改系统参数
反馈量
反馈元件
3
典型控制系统的组成
4
数控机床—工作台
ms X o (s) BsX o s KX o s Fi s
2
数学中,为了把较复杂的运算转化为较简 单的运算,常采取的一种变换手段。例如:
(1)对数变换 数量的乘积
正
对数的和差
lg y lg x1 lg x2
X Y
(2)坐标变换
Y AX
y x1 x2 逆
28
27
积分变换
拉氏变换是一种积分变换,它可以把
积分变换
什么是积分变换? 通过积分运算,把一个函数变成另一个函数的变换。
以时间为变量的函数(时域),转换 成以复数s为变量的函数(复数域, 或s域)。 拉氏变换的使用与对数变换 (Logarithmic transformation)相类似。
第2章 拉氏变换

2.1.2 欧拉公式
把平面上的点(x,y)与复数 z=x+iy对应,就建立了平面上 全部的点和全体复数间的一一对应关系。
实轴:x轴 虚轴:y轴 复平面:z平面 模:向量OZ的长度
幅角:向量OZ与正实 轴的夹角
欧拉公式
ei cos i sin 复数的三角表达式:
复数的指数表达式: z
L[ f (t )] e F ( s)
st
2.5.9 复频域的位移定理
如果L[f (t)]=F (s),则对于任意常数a,有如下结果:
L[e
at
f (t )] F ( s a)
2.6 拉氏反变换 2.6.1 拉氏反变换的定义
从象函数 F(s) 求原函数 f(t) 的运算,称为拉氏反变换,也称 拉氏逆变换,记为 L-1[F(s)]。
F ( j) f (t )e jt dt
1 f (t ) 2
F ( j )e jt d
2.3 常用函数的拉氏变换 2.3.1 指数函数的拉氏变换
指数函数是自动控制系统中常见的函数之一,f(t)=eat 的拉氏 变换为:
L[e ]
at
0
1 ( s a ) t e e dt e sa
at st
0
1 sa
2.3.2 阶跃函数的拉氏变换
阶跃函数,相当于一个恒定的信号突然加在系统上,其数学 表达式为:
0 (t 0) f (t ) r (t ) A (t 0)
A=1时称为单位阶跃函数。
拉氏变换2
2)在零初始条件下:
d n L[ n x(t )] s X ( s) dt
n
(3)积分定理
X ( s) x (0 ) L[ x(t )dt ] s s
1
式中,符号
x (t ) x(t )dt
1
由此,也可以得出两个重要的推论:
X ( s) x 1 (0 ) x n (0 ) (1) L[ ... x(t )dt...dt] n n1 ... s s s
证:由莱布尼兹法则
所以 同理可证推论
dX s Ltxt ds
d n X s n L t n xt 1 ds n
xt (10) t
的象函数
xt L 0 X s ds t
证:
0
X s ds
该定理与初值定理对偶存在。
(8)相似定理
t L x aX as a
证:令 则
t a
t a
t L x a
衰减因子 变为as
0
t st x e dt a
0
x e as d a
补充内容
拉氏变换及反变换
1拉氏变换定义 对于函数x(t) ,如果满足下列条件 x (1)当 t 0 时,t 0 ; x 当 t 0 时, t 在每个有限区间上是分段连 续的。 xt e dt (2) ,其中 为正实数,即 xt 为指 数级的;则可定义 xt 的拉氏变换 X (s ) : (2-18) st
第9章拉氏变换2

x ( t ) cos Ω c t = x ( t ) 1 [ e jΩ c t + e − jΩ c t ] 2 x (t ) cosΩct ↔ 1 [ X (s − jΩc ) + X (s + jΩc )] ROC = R 2
x (t ) = e − tu (t ) 例2 求 1 Re{ s } > 0 解 u (t ) ↔ s 1 −t −t e x (t ) = e u (t ) ↔ Re{ s } > 0 − 1 s +1
d 1 tu(t ) ↔ − U ( s) = 2 ds s Re{s} > 0
重复使用微分性质,有
t u ( t ) ↔=
n
n! s
n +1
Re{ s } > 0
• 9 . 复频域积分性质 x ( t ) ↔ X ( s ) ROC = R 若 ∞ −1 则 t x(t ) ↔ ∫ X ( s1 )ds1 ROC = R
n
)
• 两边同乘以s,取极限
x ′( 0 + ) x ′′( 0 + ) lim sX ( s ) = x ( 0 + ) + lim [ 1 + + ⋅ ⋅ ⋅] 2 s→∞ s→∞ s s
• 11 终值定理 若因果信号x(t)存在拉氏变换,除了在s=0 有一阶极点外,其余极点均在s左半平面, lim x ( t ) = lim sX ( s ) 则 t→ ∞ s→ 0 • 终值定理是说,因果信号x(t)在t趋于无穷 时的值,可以在复频域令s趋于零从sX(s) 求得。在t趋于无穷时, x(t)不易求时方便。 • 在s=0的一阶极点被抵消
9.3 拉氏变换的性质 • 拉氏变换建立了信号时域和复频域之间 的关系。信号的时域变化在复频域会有 所反映,拉氏变换的性质体现了这种关 系。其次,可以简化计算。许多与傅氏 变换类似。 • 需着重其收敛域的变化。 1. 线性
第4章 拉氏变换--2
−at
n −at
对s微分特性 微分特性
1 1 ′ −at L te =− = s + a ( s + a)2
′ 1 2 2 −at L t e =− = 2 ( s + a) ( s + a)3
L
t e =
第一种情况:单阶实数极点
A s) ( F(s) = (s − p1 )(s − p2 )⋯ s − pn ) ( kn k1 k2 →F(s) = + +⋯+ s − pn վ s − p1 s + k2e p2t + ... + kne pnt
10
F(s)的一般形式 F(s)的一般形式
ai,bi为实数,m,n为正整数。 m< n , F(s)为有理真分式 为实数, 为正整数。 为正整数 当 < 分解 零点 极点
( A s) am(s − z1 )(s − z2 )⋯ s − zm ) ( F(s) = = B(s) bn(s − p1 )(s − p2 )⋯ s − pn ) (
[
]
微分和积分特性 初值和终值定理 卷积定理
[
]
( −1) t f (τ)dτ = F(s) + f (0− ) L f (t) = ∞ F(s)ds L∫ ∫ −∞ s s t s
W.Hong, Institute of Optoelectronic science and technology, Wuhan National Lab for Optoelctronics, HUST
∫
∞.
0
f ( nT ) ∑ δ T ( t − nT ) e − st dt
拉氏变换
其中: 其中: F (s ) =
Fx+Fy
2 2
∠F (s ) = arctan
Fy F x
G (s ) = s
例如:
2 2
其中 : s = σ + jω = r∠ϕ
2
s = r ∠ 2ϕ
jGy
S平面 2
0
G(s)平面
4
σ
0
G
x
一、拉氏变换定义: 对于函数 x (t ) ,满足下列条件
s 2 + 2s + 3 3 其中: 3 = α (s + 1)3 (s + 1) = 2 s = −1 d 2 α 2 = ds s + 2s + 3 s =−1 = 2s + 2 s=−1 = 0
s 2 + 2s + 3 −1 [F (s )] = L−1 求:L 3 (s + 1)
2 −1 X (s ) = + s+1 s+ 2
s+3 c2 = × (s + 2 ) = −1 (s + 1)(s + 2 ) s = −2
x(t ) = 2e − e
−t
(
−2 t
)
2、含有共扼复极点情况:
例2 − 5 s+1 L 3 s + s2 + s
− st
dt
[t ]−1 复变量 量纲
二、简单函数的拉氏变换
1. 单位阶跃函数 1(t )
0 t < 0 1(t ) ∆ 1 t > 0
L[1(t )] = ∫ 1(t ) e
2拉氏变换逆变换
m 1
系数ai 和bi 都为实数,m和n是正整数; 通常情况下: bn 1
A(s) 0 z1 , z2 ...zm 零点 B(s) 0 p1 , p2 ...pn 极点
2018/11/13 信号与系统
对有理真分式可以进行部分分式展开,形成多 个简单分式的和;
对有理假分式可以首先进行化简,化作为: 有理假分式= P(S)+真分式 对多项式P(S)直接进行逆变换,对真分式进行部分分 式展开。 对有理真分式进行部分分式展开的按照极点的 不同特点,有不同的展开方法。
2018/11/13
信号与系统
1.极点为实数且无重根
A( s) A( s) F ( s) B( s) ( s p1 )(s p2 )...(s pn ) kn k1 k2 ... s p1 s p2 s pn 系数的求解方法:k j ( s p j ) F ( s) |s p j
信号与系统
实际中出现共轭极点时也可以采用如下展开法:
设k1 c jd , 则k2 c jd c jd c jd F ( s) s j s j A1s A2 2 2 (s )
利用待定系数法确定系 数A1和A2
A( p1 ) k1 ( s j ) F ( s ) |s j 2 jB1 ( p1 ) A( p1*) k 2 ( s j ) F ( s ) | s j k1 * 2 jB1 ( p1*)
2018/11/13 信号与系统
2018/11/13 信号与系统
例:求下示函数的逆变 换 s2 3 F ( s) 2 ( s 2s 5)(s 2)
2011-2拉氏变换基础知识

1 (s j)t e 0 s j
1 1 1 1 2 j 2 2 2 j s j s j 2 j s 2 s 2
4 拉氏变换的几个重要定理
La f1(t) b f 2(t) a F1(s) b F2(s)
2 拉氏变换的定义
L[ f ( t )] F ( s ) f ( t ) e tsdt
0
F ( s) 像 f ( t ) 原像
3 常见函数的拉氏变换
1 t 0 (1)阶跃函数 f (t ) 0 t 0 1 st 1 0 1 1 L1t 1 e st dt e 0 s s s 0
at at
f (t ) e
F (s ) F ( s A) 右 dt
π π s 2 - 15 s s s2 e e 15 s 2 52 s s 2 s 22 52
(6)初值定理
拉普拉斯变换
1 复数有关概念
(1)复数、复函数 复数
s j
复函数 F ( s) Fx ( s) Fy ( s)
例1 F ( s ) s 2 2 j (2)模、相角
模
相角
(3)解析 若F(s)在 s 点的各阶导数都存在,则F(s)在 s 点解析。
F s Fx2 Fy2 Fy F s arctan Fx
L f t s F s f 0
(1)线性性质
(2)微分定理
左 证明:
0
-st st f t e st dt e st df t e f t 0 f t de
典型常见函数拉氏变换表
21 22
t - sint
t sint
23
d L f (t ) SF (s) f (0) dt
d 2 f (t ) 2 L S F (s) Sf (0) f (0) 2 dt
d L f (t ) SF (s) f (0) dt
典型常见函数 拉氏变换表
典型常见函数拉氏变换表
序号
1 2 3 4
原函数 f(t) (t >0)
象函数 F(s)=L[f(t)]
1 (单位阶跃函数)
1 s 1 K s 1 s2
(t) (单位脉冲函数)
K (常数) t (单位斜坡函数)
典型常见时间函数拉氏变换表
序号
5 6 7 8
原函数 f(t) (t >0)
d 2 f (t ) 2 L S F (s) Sf (0) f (0) 2 dt
f (0 ) lim f (t ) lim sF ( s)
t 0 s
lim f (t ) lim sF ( s )
t s 0
f (0 ) lim f (t ) lim sF ( s)
象函数 F(s) = L[f(t)]
s2+2
s s2+2 (s+a)2+2 s+a (s+a)2+2
e -at e -at
sint cost
典型时间函数的拉普拉斯变换
序号
13 14 15 16
原函数 f(t) (t >0) 1 a
b-a b-a 1 1
象函数 F(s) = L[f(t)]
象函数 F(s) = L[f(t)]
2拉氏变换及其应用

t
0
1
2
1
2
t
t时,f1 (t ) 1(t ) 0 f1 (t ) f 2 ( )d f1 (t ) 1(t ) f 2 ( )d
0 0 t
L[ f 1 (t ) f 2 ( ) 氏变换等于其象 函数除以 s n。
5、终值定理
原函数的终值等于其象函数乘以s的初值。 证:由微分定理 L[ f (t )] f (t )e st dt sF ( s) f (0)
0
lim f ( t ) lim sF ( s ) t s0
L[ f (t )] sL[ f (t )] f (0) s[ sF ( s) f (0)] f (0) s 2 F ( s) sf (0) f (0)
依次类推,可以得到原函数n阶导数的拉氏 变换 L[ f n (t )] s n F (s) s n1 f (0) s n 2 f (0) f n 1(0)
L[af1(t ) bf 2 (t )] aL[ f1(t )] bL[ f 2 (t )]
原函数之和的拉氏变换等于各原函数的 拉氏变换之和。 2、比例定理
L[ Kf (t )] KF (s)
2-2 拉氏变换的运算定理
3、微分性质
若 L[ f (t )] F ( s) ,则有 L[ f (t )] sF (s) f (0) f(0)为原函数f(t) 在t=0时的初始值。 零初始条件下 L[ f n (t )] s n F ( s)
f (t )dt f (t ) lim f (t ) f (0) 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f
t
A t0
(0
t
t0 )
0(t 0, t t0 )
f(t) A/t0
L f
t
A t0s
1 et0s
0 t0
t
1、定义与基本变换
例5 脉冲函数
f(t)
f
t
tl0i m0
A (0
t0
t
t0 )
0(t 0, t t0 )
0
t
L f t A
注意:A=1,称其为单位脉冲
函数,记为 t
1、定义与基本变换
又如,Fourier变换将时间域的实函数变 换成频率域的频谱,即,正弦谐波的线性组 合。
对线性时不变系统而言,我们要寻求能 简化微分方程求解过程的变换。一个好的变 换至少要有如下2个特征:
1、它的基本函数具有很大的覆盖面, 2、变换本身具有线性叠加性。
1、定义与基本变换
Fourier变换就具有上述特性, 1、它的基本函数为谐波函数,或纯虚 指数函数,它们的线性组合可以表示大部分 常用的函数, 2、基本函数线性组合的输入导致的响 应是基本函数响应的线性组合,只是组合系 数发生变化。 遗憾的是, Fourier变换的收敛条件比 较严格。
1、定义与基本变换
基本时间函数及其Laplace变换 (1) 指数函数 (2) 阶跃函数 (3) 斜坡函数 (4) 正弦函数 (5) 脉冲函数
1、定义与基本变换
例1、 指数函数
f
t
Aeat (t
0)
0 (其所有 导数皆存在,则称该 复变函数 F(s) 在该域 内是解析的。
2! 4! 6!
改写
e j
2
1
2!
4
4!
6
6!
L
j
3
3!
5
5!
7
7!
L
所以 e j cos j sin
1、定义与基本变换
函数f(t)的拉氏变换 拉氏积分运算符
F
s
L
f
t
0
f
t estdt
复变量
当t<0, f(t)=0
Fs
一一映射
f t
单边、线性变换 不追求数学细节,如收敛条件等。
1、定义与基本变换
例3 斜坡函数
f(t)
f
t
At(t 0) 0(t 0)
A
t
01
L
f
t
A s2
注意:A=1,称 其为单位斜坡函 数。
1、定义与基本变换
例3 斜坡函数
d test
首先注意到:
e st ste st
dt
于是: 1
d
te st dt
estdt
t stestdt
复域位移定理
L f t eat F s a
例6
L
eat sint
s a2 2
复域位移-------时域指数乘积
2、定理与技巧
2.3 时间比例尺定理
L
f
t a
aF
as
证明
L[ f ( t )] f ( t )estdt
1、定义与基本变换
由上式可以看出,Laplace变换是Fourier变换的推广, 一些工程上重要的函数,如阶跃函数、指数增长函数等 不满足Fourier变换的收敛条件,但乘上一个合适的指数 衰减因子后,就可以完成变换。
当s为纯虚数时, 函数的Laplace变换就是它的Fourier 变换;
当s为复数时,函数的Laplace变换就是它与实部指数 函数乘积的Fourier变换。
和脉动函数相比,脉冲函数“面积”不变,时间间隔为0。
2、定理与技巧
2.1时域函数平移f t a1t a
f t1t
f t a1t a
时域移 位定理
L f t a1t a easF s
t 0a
f(t)的拉氏变换
线性叠加原理是显然的。 时域位移-------复域指数乘积
2、定理与技巧 2.2 f t与 eat相乘
, cos t
1 2
e
jt
e
jt
L sin t
1 2j
s
1
j
s
1
j
1 2j
s j s j s j s j
s2
2
L cos t
1 2
s
1
j
s
1
j
1 2
s j s j s j s j
s2
s
2
1、定义与基本变换
例5.1 脉动函数
L f t Aeatestdt Aesatdt
0
0
A esat A
sa
0 sa
在复平面上 有一个极点
为使积分收敛,这里假设(s+a)的实部大于零
1、定义与基本变换
例2 阶跃函数
f(t)
f
t
A(t 0) 0(t 0)
A 0
t
L
f
t
A s
注意:A=1,称其为单位 阶跃函数,记为 1(t)。阶 跃函数在 t=0 处是不确定 的,相当于在 t=0 处将一 个直流信号突然加到系统 上。
第二讲:数学工具----Laplace变换
1、定义与基本变换 2、定理与技巧 3 、反变换 4 、求解微分方程
1、定义与基本变换
变换是数学中经常采用的技巧,比如,在初 等数学中:
20 , 21, 21.1,L , 2
令:
对数变换
N 2
lg N lg 2
利用对数变换,我们可以将正数的乘积运算变 为对数的加法运算。
0 dt
0
0
2
test est s t testdt
0
s
0
0
3
0 1 s t testdt
s0
1、定义与基本变换
例4、 正弦、余弦函数
f
t
0,
sin
t
,
t t
0 0
f
t
0,
cos
t
,
t t
0 0
显然,直接求取并不明智。由尤拉定理有:
sin t
1 2j
e
j t
e
j t
cos 1 e j e j ,sin 1 e j e j
2
2j
1、定义与基本变换
尤拉定理证明:
有: ex 1 x x2 x3 L xn L
2! 3!
n!
所以:e j
1
j
2
3
j
4
5
j
6
7
j
L
2! 3! 4! 5! 6! 7!
而:sin
3
5
7
L
, cos
2
1
4
6
L
3! 5! 7!
1、定义与基本变换
历史从来都是选择性记忆的,优胜劣 汰,大浪淘沙。只有好的工具才会流传后 世。
Laplace变换就是这样的数学工具,它 对Fourier变换加以扩展,以复指数函数为 基本函数,将时间域的实函数变换成复频 率域的频谱函数,将微分算子变成代数算 子,非常方便。
1、定义与基本变换
复变量和复变函数
(1) 复变量: s j
(2) 复变函数: Fs Fr s jFi s
〉F(s)是函数,其自变量为s;s为复变量 〉F(s)函数值也是复的 〉除此之外,在一般情况下,F(s)与实函数无异
1、定义与基本变换 (3)复指数函数与尤拉定理:
e j cos j sin ,e j cos j sin