半闭环数控车床总体设计
半闭环控制机床的控制原理

半闭环控制机床的控制原理半闭环控制是一种用于机床控制的控制方式,它结合了开环控制和闭环控制的优点。
它可以实现精确的位置控制,并具有相对较低的成本和较高的自动化程度。
这种控制方式在机床的自动化生产中得到了广泛的应用。
半闭环控制的基本原理是,在控制系统中加入一个反馈环路,通过检测输出信号与期望信号的差值,来修正输入信号,从而实现精确的控制。
在机床的半闭环控制中,主要包括位置控制和速度控制两个方面。
在位置控制中,机床的位置被称为要控制的对象。
通过测量位置,并与期望位置进行比较,可以计算出位置误差。
然后,根据误差的大小和方向,作出相应的调整,控制运动系统的输入信号,使得位置误差逐渐减小,最终达到期望位置。
位置的测量可以通过编码器等传感器来实现,而误差的计算和调整可以通过控制器来完成。
在速度控制中,机床的速度成为要控制的对象。
需要通过控制系统检测速度,并与期望速度进行比较,计算出速度误差。
根据速度误差的大小和方向,调整输入信号,使速度误差逐渐减小,最终达到期望速度。
速度的测量可以通过速度传感器等装置来实现,而误差的计算和调整同样可以通过控制器来完成。
半闭环控制的优点在于它结合了开环控制和闭环控制的优点。
开环控制具有简单、成本低的特点,但无法校正误差,并且容易受到外部干扰的影响。
闭环控制具有修正误差和抑制干扰的能力,但相对复杂且成本较高。
半闭环控制利用了开环控制的简单性和低成本,同时通过反馈环路实现了误差修正和抑制干扰的功能。
半闭环控制在机床控制中的应用非常广泛。
它可以用于各种类型的机床,包括铣床、车床、磨床等。
在实际应用中,半闭环控制可以实现多轴的位置控制和速度控制,还可以根据需要进行多种操作模式的切换。
这样,可以大大提高机床的加工精度和效率,同时减少了操作人员的工作强度。
总结起来,半闭环控制是一种在机床控制中应用广泛的控制方式。
它通过加入反馈环路,利用位置和速度的测量结果,来修正输入信号,从而实现精确的控制。
数控车床控制系统的设计样本

CK6163数控车床控制系统设计1.本课题项目背景及研究意义金融危机爆发以来, 国际机床市场不断下滑, 国内经济型数控机床市场也受到了相称大影响, 产销量大幅下降。
虽然数据显示上半年已经止住下滑趋势, 略微回升, 但研究应对方略仍旧是当务之急。
经济型数控机床是国内数控机床行业发展起步产品, 发展时间比较长, 生产公司对此类机床技术掌握状况和生产能力也都比较成熟。
正由于如此, 加之其在国内拥有大量市场空间, 金融危机爆发之前产量较大。
但从去年金融危机后来总体状况来看, 国内经济型数控机床生产公司生产能力明显过剩。
近来中华人民共和国机床工具工业协会调研成果中得到公司生产状况显示, 重要生产经济型数控机床公司受到冲击比较大, 特别是某些产品档次比较低、产量比较大公司受到冲击更大, 甚至浮现某些公司限产现象。
导致这种状况浮现重要因素还是由于市场需求在减少, 加上经济型数控机床生产能力比较强, 生产公司比较多, 竞争比较激烈,同步经济型车床、钻床和铣床出口量下降比较严重, 某些产品出口转内销, 进一步加剧了国内市场竞争。
而对于产品档次比较高公司来说, 受到冲击就不是很明显, 特别是高精尖高档机床仍旧是供不应求。
数控机床代表着机械制造业当代科学技术发展方向和水平。
当前, 国内数控机床发展不但从技术水平上已研制出五坐标数控铣床加工中心, CNC系统和自动编程系统等。
同步, 也拥有了一定数量数控机床开发、生产、使用以及拥有量等都与世界上先进国家有较大差距。
要达到世界先进水平, 迅速发展国内数控机床行业势在必行。
经济型数控机床设计必然性: 数控机床能较好地解决形状复杂、精密、小批多变零件加工问题。
可以稳定加工质量和提高生产率, 也具备适应性强、较高加工精度。
但是应用数控机床还受到其他条件限制。
价格昂贵, 一次性投资巨大, 对于中小公司心有余而力局限性。
当前各公司均有大量通用机床, 完全用数控机床代替主线不也许, 并且代替下来机床闲置起来, 又会导致挥霍。
CK6125型半闭环系统数控车床设计

南京工程学院毕业设计说明书(论文)作者:罗毅学号: 201080426系部:机械工程学院专业:机械电子专业题目: CK6125型半闭环系统数控车床设计指导者:李雪讲师评阅者:2012 年06月南京摘要CK6125数控车床由主传动系统,进给系统和控制系统三部分组成。
设计中首先进行总体方案的确定,画出简易的传动系统图,根据给定的设计参数对主传动和进给系统中的主要传动件进行了校验计算。
进给系统由步进电机驱动滚珠丝杠实现进给。
控制系统是由CPU、键盘,显示,接口电路,脉冲分配器和电机驱动部分组成。
CK6125通过单片机反馈补偿实现半闭环控制。
最后进了技术经济分析得出设计生产该产品是经济合理的。
关键词:数控车床设计Half a closed loop system of CK6125 CNC lathe design AbstractCK6125 CNC lathe is made up by three parts ,that is main transmission system, feeding system and control system . In the design scheme for the first, draw the simple transmission system graph, according to the design parameters of a transmission and the main transmission system into the calibration calculation. Feeding system by stepping motor drive the ball screw realize feed.Control system consists of CPU, keyboard, display, interface circuit, pulse distributors and motor driving part. Through the feedback compensation of the single-chip microcomputer CK6125 realize half closed loop control .Finally into the technical and economic analysis of the design and production of the product is reasonable in economy . Keywords: the numerical control lathe design目录第一章前言 (1)第二章总体方案设计 (2)2.1设计参数 (2)2.2总体方案的确定 (2)2.3 基本参数的确定 (2)2.3.1运动参数 (3)2.3.2动力参数 (3)2.4传动原理 (4)第三章传动系统设计 (7)3.1 齿轮设计 (7)3.2轴的初步确定 (10)3.3切削力的计算 (11)3.4滚珠丝杠的设计计算 (12)3.4.1纵向丝杠的设计 (12)3.4.2横向(床鞍)进给丝杠设计 (14)3.5 步进电机选择 (15)3.5.1 纵向步进电机选择 (15)3.5.2横向步进电机选择 (16)第四章校核 (17)4.1键的校核 (17)4.2轴的校核 (17)4.3轴承的校核 (20)第五章数控系统硬件电路设计 (21)5.1 微机控制系统硬件组成 (21)5.2 确定硬件电路方案 (21)5.3 8031储存器扩展电路设计 (24)5.3.1 程序存储器扩展 (24)5.3.2 数据存储器扩展 (24)5.3.3 联线方式 (25)5.3.4 地址锁存器74LS373 (25)5.3.5 I/O口扩展电路设计 (25)5.3.6 键盘,显示器,接口电路 (26)5.4 步进电机驱动电路设计 (26)5.4.1 计算机接口 (27)5.4.2 脉冲分配器 (27)5.4.3 隔离电路的设计 (28)5.5 其它辅助电路设计 (32)5.5.1 8031时钟电路 (32)5.5.2 复位电路 (32)5.5.3 越程报警电路 (33)5.5.4光电编码器 (34)第六章技术经济分析 (36)6.1 提高技术经济价值: (36)6.2 机械零件的设计 (36)6.3 结构的设计 (36)总结 (38)参考文献 (39)附录 (40)致谢 (41)第一章前言据了解,2001年中国机床产值已进入世界前10名的第5名,机床消费额在世界排名上升到第3位,达47.39亿美元,仅次于美国的53.67亿美元,消费额比上一年增长25%。
半闭环数控机床误差补偿技术研究
收稿日期:2010-03-08作者简介:徐盛学(1969-),男,湖北郧西人,广东白云学院机电工程系,讲师,机械设计及理论硕士,研究方向为机械设计及理论、金属切削机床与刀具。
半闭环数控机床误差补偿技术研究徐盛学(广东白云学院机电工程系,广东广州510450)摘要:为提高半闭环数控机床的位置精度,建立了半闭环数控系统的位置控制模型,研究了机床传动误差的补偿机理,构造了半闭环的补偿型控制环路,实例验证了误差补偿方法的有效性。
关键词:数控机床;传动误差;补偿中图分类号:TG659文献标识码:A文章编号:粤O-11011(2010)02-0048-04一、引言全闭环数控系统能够减小甚至消除由于传动部件、装配所带来的误差,但环内包含的机械传动环节比较多,使得机床伺服系统的调试具有较大难度,系统稳定性不容易得到保证,而半闭环数控系统的环路内不包括机械传动环节,可以获得比较稳定的控制性能,因而在现代数控机床中得到广泛应用。
由于机械环节的非线性,如:丝杠螺母副的螺距误差、工作台与导轨间的摩擦特性、反向间隙等,严重影响了半闭环数控机床的位置控制精度。
〔1,2〕为了提高半闭环数控机床的位置精度,可以采用误差补偿技术,将数控机床某轴全行程内的指令位置与高精度测量装置测得的实际位置进行比较,获得该轴误差的非线性映射关系,通过补偿接口将误差补偿值输入到数控系统,构成半闭环补偿型控制环路。
二、半闭环数控系统的构成半闭环结构机床伺服进给系统由交流伺服电动机带动滚珠丝杠实现工作台进给,用丝杠螺母副将电动机的旋转运动转换成工作台的直线移动。
安装在电动机轴上的角度传感器,通过对电动机轴角位移的测量,间接地获得工作台位置输出量的等效反馈信号,这种等效反馈信号构成的系统中,不包含从电动机轴到工作台之间的机械传动链,因此这部分传动引起的误差将不能被交流伺服驱动闭环系统自动补偿。
可见机械传动误差(主要是丝杠的螺距误差及反向间隙)是影响半闭环数控机床位置精度的关键因素。
FANUC系统半闭环与全闭环的设置

1 0 6 ・
科技 论坛
F AN ( 齐齐哈 尔二机床 ( 集 团) 有 限责任公 司, 黑龙 江 齐齐哈 尔 1 6 1 0 0 0 ) 摘 要: 针对 F A N U C 系统 半 闭环 与 全 闭 环 的 设 置进 行 了论述 。 关键词 : F A N U C 系统 ; 半闭环; 全 闲环 F A N U C数控系统是 由日本 F A N U C公 司推出的。 目前拥有 O I 当 N > M 时 ,系统出现 4 1 7报警 , 这个时候也必须灵活进行设 O I F 31 I 等型号 的数控系统, 广泛应用于航天 , 重型加工等领域。近些年 定 :如下 :比如 : N / M= 2 0 , C MR = 2 , 设定的时候就应该缩小 N / M= I / 1 , MR 的值为 1 / 2 0 ,所以实际设定 C M R = I 2 0 ,即最终设定 由于我国装备制造业的快速发展 , F AN UC数控系统 以其价格低 ,稳定 同理缩小 C 2 0 , N / M= I / 1 性好 , 性能高等优势迅速 占领 了装备制造业的市场 , 尤其是在数控机床 CMR=1 1 . 8 电机转向的设定 。电机正转设定为 1 l 1 , 反转设定为 一 l 1 l 上的 占有率逐年提高。随着 F A N U C数控系统在数控机床上的普及 , 对 调试 人员的要求也越来越高 ,尤其是半闭环与全闭环的调整成为调试 1 . 9 速度反馈脉 冲数和位置反馈脉冲数的设定。速度脉 冲数一般固 定为 8 1 9 2 ( 最小移动单位 l u m) , 或者 8 1 9 ( 最, J 、 移动单位 O . 1 u m) 过程中的难点。下面就对半闭环与全闭环的设置进行简单的介绍。 位置脉冲数一般固定 为 1 2 5 0 0( 最小移动单位 l u m) , 或 1 2 5 0( 1半 闭环 的设 置 F AN U C系统半闭环的连接较为常见, 也 比较简单 , 最小 移动 单位 0 . 1 u m) 1 . 1 半闭环设置首先要进行系统初始化,在进行系统初始化之前, 1 . 1 0 参考计数器容量的设定( 若为小数或除不尽 , 则使用参数 2 1 7 9 般是要在开机的同时按 r e s e t + d e l 键进行 S R A M 全清 。 来做分母, 1 8 2 1 为分子 ) 为了介绍全清的步骤 ,下面先介绍 S R A M和 F R O M 的相关操 参考计数器容量指定栅格方式返回参考点的栅格间隔 ,也即电机 作。 转反馈 回来的位置脉冲数(若没定不准,会导致回零不准) S R A M 包括 : 系统参数 , 加工程序 , 刀补, 宏变量 , 螺补 , P MC参数 。 参考计数器容量 =栅格间隔 / 检测单位 =脉冲编码器一转的移动 F R O M 包括 : P MC程序 , 系统底层运行软件。 量/ 检测单位 =电机一转机床实际移动的距离 / 检测单位 =丝杆螺距 / 具体方法如下 : 检测单位(齿轮比 1 :1时) 1 . 1 1 在上述参数完成之后 ,断 电重启 ,如果初始化位 2 0 0 0 # 1 = 1 开机同时按 r e s e t +d d,S R A M 全清 , 梯形图还在。 开机 同时按 d e l , 清除加工程序区( 单独按 d e l 或 r e s e t 必需保证 即说明电机初始化完成。 1 . 1 2 初始化完成之后半闭环设定完成。 P WE -1 ) 开机同时按 r e s e t , 清除加工程序区之外的 S R A M中东西 , 但保密 2全闭环的调整 参数不清。开机同时按 x + 0,清除 F R O M 中的 P MC程序 ,但是 普通光栅尺的设定 ,这里只介绍 1 V p p正弦波信号光栅尺的设定 P Mc参数不清。 方法 : 1 _ 2 全清之后将参数 3 1 1 1 撑 0设为 1重启出现 “S V — P R M ”按 2 . 1 首先确认 F a n u c分离型检测器标签类型:A 0 6 B 一 6 0 6 1 一 C 2 0 1 键 ,即可显示伺服初始化画面或者多次按 S Y S T E M 键直接从 ME N U 2 . 2设定 相应轴 1 8 1 5 # 1 = 1 画面也 可 以找 到 。 2 . 3修改 N / M: (参数 2 0 8 4 ,2 0 8 5 ) N / M= 检测器的信号周期 (u m) 51 2 1 - 3 进入初始化设定画面之后将第一行初始化位(参数 2 0 0 0号 ) , 全 部设 为 0 。 注 :直线 尺样本上 的信 号间距 即为光栅 尺的信 号周期 ,比如 1 4电机 I D号(参数 2 0 2 0 ) 。查看电机铭牌,确定电机 I D号。 L B 3 8 2 C 的信号周期为 4 0 u n r 1 . 5 A MR: 不进行设定,默认为 0 圆光栅样本上只给 出线 数 ,所以信号间距需要计算 :信号周期 1 . 6 C M R 指令倍乘比(参数 1 8 2 0 ) 3 6 0 0 0 0 / 线 数 电机每转动 1圈的移动距离 = 3 6 0 * 机械减速 比 C M R计算值 = 最小移动单位(C N C侧 ) / 检测单位( 伺服侧 ) 按照上面的公式计算 : 旋转编码器同样 , 旋转编码器样本也 只给出线数 , 信号间距需要 C M R计算值为 1 / 2 — 1 2 / 7时 , 设定值 = 1 0 0 + (1 / C M R计算值) 计算 : 信号周期 = 螺距 / 线数 2 . 4 修改位置环脉冲数(参数 2 0 2 4 ) 。位置脉冲数 =电机每转动一 C M R计算值为 1 ~ 4 8时 , 设定值 = 2 * C M R 计算值 般来说 ,正常情况下 ,C MR = 2 圈移动的距离(u m)" 5 1 2 / 检测器的信号周期 (1 l m) 车床 x 轴 ,如果为直径编程 ,C M R = 1 0 2 当位置脉冲数大于 3 2 7 6 7时 , 可以在参数 2 1 8 5中设定乘数 电机每转动 1圈的移动距离 = 丝杆螺距 机械减速比 1 . 7 柔性齿轮比 N / M 的设定(N 和 M 的最大值均为 3 2 7 6 7 ) 直线轴 时 : 2 . 5 距离码光栅尺功能设定。在普通光栅尺的设定完成之后 ,实现 N / M =电机每转反馈的脉冲数 / 1 0 0 0 0 0 0 =电机一转机床实际移动 距离码功能只需要修改如下参数 : 的距离 / 1 0 0 0 0 0 0 = (丝杆螺距 机械减速 比)/ 1 0 0 0 0 0 0 a对于 1 8 i — T B 系统 ,请 确认 诊断 1 2 0 3 # 4 = 1 I b .修 改相 应轴 1 8 1 5 # 2 = 1 ; c . 修改参考计数器容量(参数 1 8 2 1 o修改参数 1 8 2 1为第 不难看出 , 在齿轮 比为 1 :1时 N / M=丝杆的螺距(a m)/ 1 0 0 0 0 0 0 组 M a r k点的间距 ,单位为 u m; d . 修改参数 1 8 8 2 。设定参数 1 8 8 2 其中 1 0 0 0 0 0 0指的是 a i 脉冲编码器的分辨率。 为第二组 Ma r k点的间距 , 单位为 u m; e . 关机重启 ; £ 开机后执行 回零 旋 转轴 时 : 操作 (回零速度 为参数 1 4 2 5 ) ,将各 轴 自动计算后 的值 填入参数 N / M=电机一转旋转轴旋转的度数 / 1 0 0 0 0 0 0 = (3 6 0 0 0 0 * 机械减速 1 8 8 3 ,单位为 u m擗如果需要更改距 离码 的零点( 如果是绝对型光栅 比 )/ 1 O O O O o 0 尺,省略此步骤) , 操作如下 : ①开机先回零操作。 ② 回零完成之后 ,将 当 N / M 的 比值 十分悬殊时 (比如 N , M 中有一个值超过 3 2 7 6 7 轴 手动移动 到所 希望的零点位置 。③将 该点的绝对 坐标值 +参数 时) ,需要灵活处理进行参数设定。 1 8 8 3的值 ,重新设定 ^ 参数 1 8 8 3 , 单位 L l m 。④重新开机回零即可。 比如说—个半闭环系统最/ J 、 指令单位为 l u m,按照上面的方法计 2 . 6绝 对型 光栅 尺调试 。在上 述调 试完 成之 后 。a 设 定 参数 算时 ,得到 C MR = 2 , N / M= I / 1 0 0 0 0 0 ,这个 时候显 然 1 0 0 0 0 0 )3 2 7 6 7 , 1 8 1 5 # 5 = 1绝对光栅 尺有效 ; b . 移动到零点位置 ,修改 1 8 1 5 # 4 = 1即 所 以可以通过扩大 C MR 的方法来进行设定 ,C M R 和柔性齿轮 比同 可 ,开机后当前点就是零点。 时扩大相同的倍数。设定如下 : 以上就是 F A N U C系统半闭环与全闭环的设置方法 , 正确灵活的运 C MR = 2 0 , N / M= 1 / 1 0 0 0 0 (但是相应的最小检测单位会缩小同样的 用不但有助于提高调试效率 ,更可以提高机床的稳定性 。提高加工效 倍数 ,也即 0 . 1 u n) r 率。
数控车床半闭环控制

数控车床半闭环控制近年来,越来越多的加工厂家开始采用数控车床进行生产加工,也就是将数字化控制技术应用于车床的控制系统中,从而实现高精度、高效率的加工。
而数控车床控制系统的一种重要形式则是半闭环控制。
下面就来介绍一下数控车床半闭环控制的相关知识。
一、数控车床半闭环控制的原理半闭环控制是在开环控制的基础上加入了反馈控制的一种控制方式。
在数控车床中,半闭环控制是指通过传感器(如编码器等)检测主轴转速等参数,并在控制系统中作为反馈信号,用于实时调节伺服电机的输出电压和电流,从而达到精准的加工效果。
具体来说,数控车床半闭环控制可以分为以下几个步骤:1. 首先由运动控制器发出指令,控制伺服电机转动;2. 传感器实时检测主轴转速等参数,并将检测结果反馈到控制系统中;3. 控制系统通过比对实际检测结果和设定值,计算出误差,并将误差信号送回伺服电机,调节输出电压和电流,实现精准的控制;4. 反馈控制过程不断循环,以实现对工件加工的精准控制。
二、数控车床半闭环控制的优点1. 提高了加工质量和精度采用半闭环控制后,控制系统能够实时获得主轴转速等加工参数,从而及时对差异进行调整,避免因加工参数变化而导致的加工质量下降和加工精度误差,确保加工质量。
2. 提高了生产效率半闭环控制使得车床的生产效率更高,加工速度更快。
同时,由于数控车床的控制精度更高,加工时间更短,从而减轻了操作工的劳动强度,提高了生产效率和加工效率。
3. 灵活性更高数控车床半闭环控制的精度更高,即使在加工复杂形状的工件时仍能够保持高精度,灵活方便地满足各种不同的加工要求。
4. 维修和维护成本更低使用数控车床半闭环控制后,由于其精度更高,加工不易产生误差,减少了设备的故障维修和维护成本,大大降低了企业成本。
三、数控车床半闭环控制的应用场合1. 适用于高精度加工数控车床半闭环控制可以有效地提高加工精度,适应高精度的加工需求。
例如航空航天、电子设备等高精度产品的加工。
数控机床半闭环控制及螺距误差补偿设计
在图 4 的模型中 , 丝杠螺距误差所产生的工
作台期望位置 x′,与实际位置 x 的偏移 ,可由非线
性函数 N ( x′) 描述 , N ( x′) 一般由实验得到[5 ,6 ] 。
首先定义 x 轴有效工作行程 L 及测量增量 S , 得
到测量点 n = L / S , 以坐标轴参考点为测量基准
点 ,数控系统控制伺服轴以 S 增量分别正向和反
向递增定位 ,同时利用激光干涉仪记录工作台实
际位移 , 该过程循环执行 5 次后 , 计算 5 次平均
值 ,得到正反方向两组实际位置平均值 (表 1) 。
表 1 N ( x′) 数学描述
标定值
正向实际值
反向实际值
( nomi nal) x′1 x′2
( f orward) x 1+ x 2+
( reverse) x1x2-
为构建符合 GB/ T18759. 1 标准的开放式控 制系统结构及应用程序接口 ,本文定义一种可统 一图 1 和图 2 的基于虚实映射的半闭环控制系统 结构 ,如图 3 所示 。
图 3 基于虚实映射的半闭环控制系统结构图
图 3 的方框所代表的数控系统实现了常规的 半闭环控制结构 ,虚拟角位置反馈和虚拟速度控 制指令分别为半闭环控制系统的反馈和控制量输 出 。数控系统中所定义的虚实映射层实现了每个 采样周期内虚拟的反馈位置 、速度输出指令同实 际物理系统的位置反馈 、速度指令间的映射 。当 物理系统为交流伺服电机时 ,虚实映射层通过接 口函数实现了虚拟速度控制指令和实际电机驱动 电压的映射 ,以及实际编码器角度和虚拟角位置 反馈的映射 。当物理系统为步进电机时 ,虚实映 射层将虚拟速度指令映射为步进电机单位时间发 送脉冲的个数 ,而将上个采样周期的指令所产生 的期望位置输出映射为当前周期的虚拟角位置 反馈 。
全闭环控制及半闭环控制数控车床的探讨

全闭环控制与半闭环控制数控车床的探讨关键词:全闭环控制;半闭环控制;开环控制;检测装置1 引言用户在购置机床时,可根据加工工件的需求不同,对机床稳定性、精度、刚性等关注的侧重点会有所不同,对精度有特殊要求的用户时常会提到全闭环控制,但不少人对全闭环控制和半闭环控制缺乏全面的了解,盲目的认为全闭环控制机床就是比半闭环控制机床的好,这是非常片面的观点,下面就全闭环控制和半闭环控制的机床发展简单的介绍和比照。
2 原理介绍数控机床运动链包括数控装置→伺服编码器→伺服驱动器→ 机电→丝杠→挪移部件,根据位置检测装置安装位置的不同,分为全闭环控制、半闭环控制、开环控制。
2.1 全闭环控制进给伺服系统将位置检测装置〔如光栅尺、直线感应同步器等〕安装在机床运动部件〔如工作台、拖板〕上,并对挪移部件位置发展实时的反响,通过数控系统处理后将机床的位置状态告知伺服机电,伺服机电通过系统指令自动发展运动误差的补偿即位置的补偿。
但由于它将丝杠、螺母副及机床工作台这些大惯性环节放在闭环,调试时,其系统的稳定状态调试就非常麻烦。
此外像光栅尺、直线感应同步器这种高精度的测量装置其价格较高,安装复杂,很有可能引起振荡,所以一般机床不使用全闭环控制。
以下图为发那科全闭环控制示意图。
2.2 半闭环控制进给伺服系统将位置检测装置安装在伺服机电的端部或者是丝杆的端部〔主要是以安装在伺服机电的端部为主〕,用来检测丝杠的回转角,间接测出机床运动部件的实际位置,经反响送回控制系统。
由于机械创造水平的提高及速度检测元件和丝杆螺距精度的提高,半闭环数控机床已能到达相当高的进给精度和定位精度。
所以大多数的机床厂家广泛采用了半闭环数控系统来控制运动部件的定位。
3 实际应用3.1 全闭环控制系统位置检测装置〔如光栅尺、直线感应同步器等〕有不同精度等级〔±0.02mm、±0.01mm、±0.005mm、±0.001mm、±0.0005mm〕,所以全闭环控制也会有误差,定位精度上下受精度等级影响,而且精度等级越高价格越贵。
CK型半闭环系统数控车床设计

CK型半闭环系统数控车床设计本文将介绍一种新型的数控车床设计,即CK型半闭环系统数控车床。
该设计采用了先进的半闭环系统技术,既能保证高精度的加工质量,又能降低使用成本,是一种具有良好经济效益和技术效益的数控机床。
以下将从设计思路、结构特点、技术指标等方面对其进行详细介绍。
一、设计思路CK型半闭环系统数控车床的设计思路主要包括:1. 引入半闭环系统技术,可靠性高,适用于大量生产;2. 采用可编程控制器,编写简单易懂的程序,实现高精度的加工;3. 设计人性化,方便操作,减少人为误操作。
基于以上思路,CK型半闭环系统数控车床的设计具有以下结构特点。
二、结构特点1. 主轴箱:该部分由大功率电机、主轴以及主轴前后支撑系统组成,主轴大功率,稳定性好,可使车床在高速旋转时减少震动,提高加工精度。
2. 车床床身:床身采用先进的压铸加工,整体性好,质量稳定。
床身横梁宽度大,支撑力度好,能承受高速运动时所产生的惯性力。
3. 数控系统:数控系统采用可编程控制器,通过编写程序实现高精度加工,可适应各种不同形状、尺寸的工件加工。
4. 伺服系统:伺服电机和伺服驱动器组成的伺服系统,能够精确控制车床运动状态,保证了加工精度和生产效率。
5. 液压系统:为车床提供稳定的切削力,能够在加工的过程中保证切削的平稳,并在加工结束后将工件送出。
三、技术指标1. 物料加工范围:该车床可加工圆柱形、圆锥形、球形、螺纹等多种物料,具有较高的加工范围性能。
2. 主轴最高转速:主轴最高转速可以达到5000r/min以上,运动平稳,加工效果好。
3. 精度指标:该车床的最高加工精度可达到0.01mm,加工精度远高于一般的机械车床,满足了不同部门的需求。
4. 工作台面积:工作台面积较大,便于安装大件物料,可在同一工作台上完成大部分的加工过程。
5. 车床体积:车床体积小,占地面积小,适用于车间面积有限的企业。
四、总结CK型半闭环系统数控车床是一种高性价比、具有良好经济和技术效益的数控机床,采用了先进的半闭环系统技术,通过可编程控制器实现高精度的加工,具有广阔的应用前景和巨大的市场潜力。
半闭环数控车床进给系统机械结构设计

图书分类号:密级:毕业设计(论文)半闭环数控车床进给系统机械结构设计A Half Closed Loop NC Lathe Feed System Mechanical Structure Design学生姓名班级学院名称专业名称指导教师年月日XXX学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日XXX学位论文版权协议书本人完全了解XXX关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归XXX所拥有。
XXX有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
XXX可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要从上世纪开始,伴随着计算机技术,电子领域的飞跃发展,是自动化技术日益成熟,与此同时呢,高科技的发展使数字信号来改变实际运动成为可能,这成为数控技术飞跃发展的前提。
就数控车床来说的话,进给系统的数控化,大大的提高了加工的质量。
半闭环控制系统是是一种伺服的(俗称反馈)的系统,这个反馈的系统可以反映出丝杠运动的偏差,可以改变运动信号,来使得运动更加的准确,提高运动的精度。
当然了,作为伺服的反馈系统,不仅仅只有半闭环一种,同样有开环,闭环等方式,那么由于半闭环的反馈具有稳定性,准确性等优点,使得它更加广泛的呗选为数控机床的反馈方式。
我的毕业设计的题目为半闭环数控车床的进给部位,机械结构方面的设计,很明白,重点在于对其进给部分的设计,作为数控车床,进给方向可以分为X、Z向,本设计将一一的对各个方向进行计算选型,以求能够使得自己设计的系统能够满足实际要求,进给系统对于数控车床来说的话,可是相当重要的,因为它是影响加工精度和质量的关键位置,更高精度的进给系统能够使得加工的精度,质量飞跃,是具有重大意义的。
数控车床半闭环控制

数控车床半闭环控制题目:X-Y数控工作台机电体系设计学生姓名胡月专业机械设计制造及其主动化学号70100747班级2006级2班指导教师张师长教师王师长教师安徽工业大年夜学马钢技师学院2010年10月摘要数控机床的伺服体系平日是指各坐标轴的进给伺服体系。
它是数控体系和机床机械传动部件间的连接环节,它把数控体系插补运算生成的地位指令,精确地变换为机床移动部件的位移,直接反应了机床坐标轴跟踪活动指令和实际定位的机能。
伺服体系的高机能在很大年夜程度上决定了数控机床的高效力、高精度,是数控机床的重要构成部分。
为了能获得更高控制精度我们可以根据伺服体系的构成进行选择,从而达到幻想的后果。
关键词:车床,数控,伺服体系,半闭环引言 (4)设计义务 (4)第一章伺服体系的概述 (5)第二章半闭环控制体系设计 (5)2.1系兼顾划设计 (5)2.1.1 控制筹划切实其实定 (6)2.1.2伺服驱动元件筹划的选择 (6)2.1.3检测反馈元件的选择 (6)2.1.4机械体系与控制系兼顾划切实其实定 (6)2.2 具体筹划的设计计算和选择 (6)2.2.1主切削力及其切削分力计算 (6)2.2.2导轨摩擦力的计算 (7)2.2.3计算滚珠丝杠螺母副的轴向负载力 (7)2.2.4肯定进给传动链的传动比i和传动级数 (7)2.2.5滚珠丝杠的动载荷计算、直径估算和设计 (8)2.2.6滚珠丝杠螺母副承载才能校核和设计 (9)2.2.7计算机械传动的刚度 (11)2.2.8电念头的选型与计算 (12)2.2.9增量式扭转编码器的选用 (15)2.3 机械传动体系 (15)2.3.1机械传动体系的动态分析 (15)2.3.2机械传动体系的误差计算与分析 (16)2.4 进给体系的设计 (16)2.4.1齿轮箱的设计 (16)2.4.2床身及导轨 (17)2.4.3中心轴的设计 (19)第三章数控体系硬件电路设计 (20)第四章体系控制软件的设计 (22)4.1.控制软件的重要内容 (22)4.2软件设计 (22)4.2.1.体系控制功能分析 (22)4.2.2.体系治理法度榜样控制 (23)4.2.3主动加工法度榜样设计 (24)总结与领会 (24)致谢 (25)参考材料 (25)数控车床半闭环控制体系设计姓名 胡月单位 马钢技师学院一.引言现代科学技巧的赓续成长,极大年夜地推动了不合学科的交叉与渗入渗出,导致了工程范畴的技巧革命与改革。
机电一体化系统设计课程设计报告车床经济型数控改装设计

《机电一体化系统设计》课程设计题目一一、任务分析1.设计题目:CA6140车床经济型数控改装设计2.设计内容与要求:将CA6140普通车床改造成经济型数控车床。
要求该车床具有切削螺纹的功能,纵向和横向具有直线和圆弧插补功能。
系统分辨率纵向:0.01mm,横向:0.005mm。
设计参数如下:最大加工直径:在床面上400mm在床鞍上210mm最大加工长度:1000mm快进速度纵向 2.4m/min横行 1.2m/min最大切削进给速度纵向0.5m/min横行0.25m/min代码制ISO脉冲分配方式逐点比较法输入方式增量值、绝对值通用控制坐标数 2最小指令值纵向0.01mm/pulse横行0.005mm/pulse刀具补偿量0~99.99mm进给传动链间隙补偿量纵向0.15mm横行0.075mm自动升降速性能有二、总体方案设计接到数控装置的设计任务以后,必须首先拟定总体方案,绘制系统总体框图,才能决定各种设计参数和结构,然后再分机械部分和电气部分进行设计计算。
现以机电一体化的典型产品经济型数控机床为例,分析总体方案的拟定的内容和应该考虑的问题。
机床数控系统总体方案的拟定应包括以下内容:系统运动方式的确定,伺服系统的选择,执行机构的结构及传动方式的确定,微型计算机数控系统的选择、设计等。
应根据毕业设计任务书及要求提出系统总体方案,对方案进行分析比较和论证,最后确定总体方案。
1.总体设计方案的论证对于普通机床的经济型数控改造,在考虑总体设计方案时,应遵守的基本原则是:在满足设计要求的前提下,对机床的改造应尽可能少,以降低成本。
1)数控系统运动方式的确定数控系统按运动方式可分为点位控制系统、点位直线控制系统、连续(轮廓)控制系统。
由于要求CA6140车床加工复杂轮廓零件,所以本微机数控(MNC)系统采用连续控制系统。
2)伺服进给系统的选择数控机床的伺服进给系统有开环、半闭环和闭环之分。
采用直流或交流伺服电机驱动的闭环控制方案的优点是可以达到很好的机床精度,能补偿机械传动系统中的各种误差、传动间隙及干扰等对加工精度的影响。
数控车床控制系统方案设计
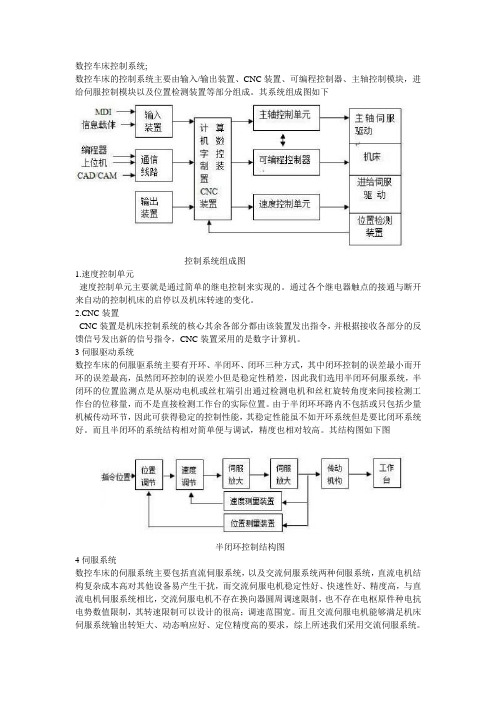
数控车床控制系统;数控车床的控制系统主要由输入/输出装置、CNC装置、可编程控制器、主轴控制模块,进给伺服控制模块以及位置检测装置等部分组成。
其系统组成图如下控制系统组成图1.速度控制单元速度控制单元主要就是通过简单的继电控制来实现的。
通过各个继电器触点的接通与断开来自动的控制机床的启停以及机床转速的变化。
C装置CNC装置是机床控制系统的核心其余各部分都由该装置发出指令,并根据接收各部分的反馈信号发出新的信号指令,CNC装置采用的是数字计算机。
3伺服驱动系统数控车床的伺服驱系统主要有开环、半闭环、闭环三种方式,其中闭环控制的误差最小而开环的误差最高,虽然闭环控制的误差小但是稳定性稍差,因此我们选用半闭环伺服系统,半闭环的位置监测点是从驱动电机或丝杠端引出通过检测电机和丝杠旋转角度来间接检测工作台的位移量,而不是直接检测工作台的实际位置。
由于半闭环环路内不包括或只包括少量机械传动环节,因此可获得稳定的控制性能,其稳定性能虽不如开环系统但是要比闭环系统好。
而且半闭环的系统结构相对简单便与调试,精度也相对较高。
其结构图如下图半闭环控制结构图4伺服系统数控车床的伺服系统主要包括直流伺服系统,以及交流伺服系统两种伺服系统,直流电机结构复杂成本高对其他设备易产生干扰,而交流伺服电机稳定性好、快速性好、精度高,与直流电机伺服系统相比,交流伺服电机不存在换向器圆周调速限制,也不存在电枢原件种电抗电势数值限制,其转速限制可以设计的很高;调速范围宽。
而且交流伺服电机能够满足机床伺服系统输出转矩大、动态响应好、定位精度高的要求,综上所述我们采用交流伺服系统。
5.PLCPLC在数控机床的应用中主要有两种形式,一种是内装式另一种是独立式内装式也称为集成式,在设计之初就将NC与PLC结合起来考虑,NC和PLC之间的信号传递是在内部总系的基础上进行的,因而有较高的交换速度和较宽的信息通道。
因而这种形式的PLC对于系统的使用有着较大的优势,因此数控系统一般采用这种形式的PLC。
CW6163普通车床半闭环数控改造毕业设计任务书

毕业设计任务书一、设计题目: CW6163普通车床半闭环数控改造 二、设计参数:最小设定运动单位 脉冲当量δ纵=0.01mm/step δ横=0.005mm/step 最大进给速度 纵向max V =3m/min ; 横向max V ==1.5m/min 滚珠丝杠导程 S 横=4mm ; S 纵=6mm 行程 L 横=490mm ; L 纵=1060mm 工作台重量 G 横=197kg G 纵=434kg 时间常数 T =10ms T 纵=10ms 电机钮矩 P 纵=20Nm P 横=12 Nm 步距角=0.6/1.2(0.75/1.5)工作速度V 横=1m/min V 纵=2m/min (二)改造目标1.要求采用半闭环改造方式,位置检测器安装在伺服电机的轴上,采用直流伺服电动机,用光电脉冲传感器既测量电动机的角位移,又通过计时而获得速度。
2.将横向滑动丝杠改造为滚珠丝杠。
3.定位精度达到±0.01mm 三、设计要求1.对滚珠丝杠的设计,是考虑在最大负荷作用下的使用寿命。
丝杠的长度,丝杠的转速,滚道的硬度计运转情况满足工作要求。
选出的丝杠型号,要计算其传动效率,并演算其刚度及稳定性。
2.所选电机要满足设计要求3.数控系统的设计定位在半闭环控制的数控系统,相关的硬件元件的设计和选择要满足设计要求。
4.数控系统控制软件的设计。
5.要有相应的设计CAD图纸。
6.论文不端行为检测重复率在30%以下,如果通不过要包修改直至通过。
7.要提供论文讲解服务,保证通过答辩。
四、设计内容(一)绪论1.分析国内外数控机床发展的历史和现状。
2.数控机床发展趋势和研究方向3.普通机床的数控化改造的必要性(二)半闭环控制系统设计结合设计任务拟定CW6163车床数控化改造的总体方案,并对总体方案进行分析比较和论证,最后确定总体方案。
数控系统总体方案设计内容:系统运动方式的确定,伺服系统的选择、执行机构的结构及传动方式的确定,微型计算机数控系统的选择、设计等(数控系统硬件电路设计)应根据毕业设计任务及要求提出系统总体方案,对方案进行分析和论证,最后确定总体方案。
数控车床半闭环控制设计

高等教育自学考试本科毕业论文数控车床半闭环控制系统的设计考生姓名:潘锋荣准考证号:011811306046 专业层次:本科院(系):机械与动力工程学院指导教师:唐晓庆职称:讲师重庆科技学院二O一二年七月二十九日高等教育自学考试本科毕业论文数控车床半闭环控制系统的设计考生姓名:潘锋荣准考证号: 011811306048专业层次:本科指导教师:唐晓庆院(系):机械与动力工程学院重庆科技学院二O一三年七月二十九日摘要数控机床的伺服系统通常是指各坐标轴的进给伺服系统。
它是数控系统和机床机械传动部件间的连接环节,它把数控系统插补运算生成的位置指令,精确地变换为机床移动部件的位移,直接反映了机床坐标轴跟踪运动指令和实际定位的性能。
伺服系统的高性能在很大程度上决定了数控机床的高效率、高精度,是数控机床的重要组成部分。
为了能得到更高控制精度我们可以根据伺服系统的组成进行选择,从而达到理想的效果。
介绍了一种实用的半闭环数控系统反馈控制计算方法。
该方法把反向间隙补偿、螺距误差和插补运算出的理想速度作为速度前馈,把上次速度前馈和本次速度前馈的差值作为加速度前馈,同时利用改进的PID算法计算出的输出值,与前馈输入累加作为驱动器速度输入理想值,经过D/A转换把速度输出到电机驱动器。
经实践证明该方法算法简单、稳定性好,该方法提高了系统的控制精度,实有利于实现半闭环数控机床精密加工。
关键词:车床,数控,伺服系统,半闭环Design of semi closed loop control system for NC latheAbstractServo system of CNC machine tool servo system usually refers to each coordinate axis. It is the connecting link of NC system and machine parts, it put the position command interpolation NC system, precise transform of the displacement of its moving parts, directly reflects the performance of tracking instruction and the actual location of the machine tool axes. High performance servo system of NC machine tools of high efficiency, the high accuracy to a great extent, is an important part of the NC machine tool. In order to get higher control precision we can choose according to the composition of the servo system, so as to achieve the ideal effect.The calculating method of the feedback control of a kind of practical half closed loop control system. The backlash compensation, pitch error and interpolation of the ideal speed as the speed feedforward, the last speed feedforward and the speed feedforward and acceleration feedforward difference as, by using the improved PID algorithm to output the calculated value, and the feedforward input accumulation as the drive speed input ideal value, after D/A conversion speed output to the motor drive. It is proved that the algorithm is simple, good stability, the method improves the precision of control system, is conducive to the realization of the semi closed loop NC machining.Keywords:Lathe,CNC,servo system,the semi closed loop目录中文摘要 (I)英文摘要 ........................................................................................ 错误!未定义书签。
数控车床半闭环控制
毕业设计(论文) 题目:X-Y数控工作台机电系统设计学生姓名胡月专业机械设计制造及其自动化学号 70100747 班级 2006级2班指导教师张老师王老师安徽工业大学马钢技师学院2010年10月摘要数控机床的伺服系统通常是指各坐标轴的进给伺服系统。
它是数控系统和机床机械传动部件间的连接环节,它把数控系统插补运算生成的位置指令,精确地变换为机床移动部件的位移,直接反映了机床坐标轴跟踪运动指令和实际定位的性能。
伺服系统的高性能在很大程度上决定了数控机床的高效率、高精度,是数控机床的重要组成部分。
为了能得到更高控制精度我们可以根据伺服系统的组成进行选择,从而达到理想的效果。
关键词:车床,数控,伺服系统,半闭环引言 (4)设计任务 (4)第一章伺服系统的概述 (5)第二章半闭环控制系统设计 (5)2.1系统方案设计 (5)2.1.1 控制方案的确定 (6)2.1.2伺服驱动元件方案的选择 (6)2.1.3检测反馈元件的选择 (6)2.1.4机械系统与控制系统方案的确定 (6)2.2 具体方案的设计计算和选择 (6)2.2.1主切削力及其切削分力计算 (6)2.2.2导轨摩擦力的计算 (7)2.2.3计算滚珠丝杠螺母副的轴向负载力 (7)2.2.4确定进给传动链的传动比i和传动级数 (7)2.2.5滚珠丝杠的动载荷计算、直径估算和设计 (8)2.2.6滚珠丝杠螺母副承载能力校核和设计 (9)2.2.7计算机械传动的刚度 (11)2.2.8电动机的选型与计算 (12)2.2.9增量式旋转编码器的选用 (15)2.3 机械传动系统 (15)2.3.1机械传动系统的动态分析 (15)2.3.2机械传动系统的误差计算与分析 (16)2.4 进给系统的设计 (16)2.4.1齿轮箱的设计 (16)2.4.2床身及导轨 (17)2.4.3中间轴的设计 (19)第三章数控系统硬件电路设计 (20)第四章系统控制软件的设计 (22)4.1.控制软件的主要内容 (22)4.2软件设计 (22)4.2.1.系统控制功能分析 (22)4.2.2.系统管理程序控制 (23)4.2.3自动加工程序设计 (24)总结与体会 (24)致谢 (25)参考资料 (25)数控车床半闭环控制系统设计姓名 胡月单位 马钢技师学院一.引言现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
车床总体改造方案设计

车床总体改造方案设计1.机械部分的改造设计ca6140车床的主轴以及进给系统都是由法兰式电动机拖动。
普通车床主轴传动系统部分改造难度大、成本高,且精度提高有限,所以在改造此类机床时,摇臂钻床要选那些主轴各方面性能能满足使用要求的。
改造时,保留原主轴系统,对进给传动系统及电气控制系统进行改造。
进给传动系统的传动精度及效率也是数控机床性能的重要组成部分。
原机床进给箱为交换齿轮箱,结构复杂、反向间隙大、传动精度差。
在改造过程中,采用步进电动机与滚珠丝杠,并装有减速机构的传动方式,通过减速机构可得到所需的减速比并增大驱动力矩。
普通车床原机床是用滑动丝杠,传动误差大,因此在数控化改造中将其更换为滚珠丝杠。
滚珠丝杠的传动效率高、无爬行、预紧后可消除反向间隙、精度高。
改造后ca6140车床的横向、纵向传动方式为:步进电动机一消隙齿轮一滚珠丝杠螺母副一工作台的传动方式。
ca6140车床垂直方向的传动方式为:步进电动机一圆锥齿轮一滚珠丝杠螺母副一工作台。
同时,垂直方向还应考虑滚珠丝杠的自锁,采用超越离合器的自动平衡装置实现自锁。
ca6140车床的导轨是采用铸铁-铸铁或铸铁—淬火钢滑动导轨,其静摩擦因数大,摇臂钻床动、静摩擦因数相差较大,低速时易出现爬行,力矩损失大,影响运动的平稳性和定位精度。
若是将导轨改造成滚动导轨或静压导轨,工艺复杂、费用大、周期长;所以在对ca 6140车床改造时采用在普通车床原导轨上粘接聚四氟乙烯软带的方法。
聚四氟乙烯软带是以聚四氟乙烯树脂为基材与耐磨填充料复合后,在常温下用模压法成型烧结、车削和活化处理制得。
其特点是摩擦因数低,抗磨损,静、动摩擦因数差值小,定位准确,防振消声运行平稳,低能耗,具有耐老化和足够的力学性能,对提高机械加工精度、延长导轨副使用寿命也有一定的作用。
这种方法比较方便,费用低,动、静摩擦因数相差小,耐磨性和抗咬伤力强,具有良好的自润滑和抗振性,进给运动无爬行,运动平稳。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本次设计任务来源于校企合作开发课题。
先调研数控车床的发展状况,随着科学技术的发展,机械产品结构越来越合理,其性能、精度和效率日趋提高更新换代频繁,生产类型由大批大量生产向多品种小批量生产转化。
因此,对机械产品的加工相应得提出了高精度、高柔性与高度自动化的要求。
数字控制机床就是为了解决单件、小批量、特别是复杂型面零件加工的自动化并保证质量要求而产生的。
该设计主要考虑两大方面:数控部分和机械部件。
首先进行数控车床总体方案的比较,然后确定最佳方案,完成半闭环数控车床的总体布局,绘制出半闭环数控车床的传动系统图,数控车床总体的尺寸联系图。
通过对切削力的计算来设计进给系统、刀架、主轴卡盘的夹紧、液压尾座的行程等。
完成该数控车床总体设计,总体布局,绘制尺寸联系总图一份,以及床身设计,绘制床身零件图,底座设计,绘制底座零件图。
对车床振动的分析来提出加强机床刚度的方法,还有设计该数控机床的排屑装置及尾架装置。
最后叙述该机床平时的维护及保养,有利于机床的正常运转。
预期成果设计出符合机械厂要求的通用型的,半闭环,斜床身,双轴联动,卧式数控车床,尽量满足生产需要,使我们设计的数控机床可靠性,加工精度,变速范围,操作宜人性,工作效率及防护结构,造型等诸多方面更加适合实际的使用要求。
关键词:半闭环;数控车床;总体设计;AbstractThis design task comes from the school-enterprise cooperation and development issues.Development of the first investigation of CNC lathe, with the development of science and technology, mechanical product structure more reasonable, and its performance, efficiency and precision of increasingly improved frequent replacement, production types from mass production to the many varieties of small batch production. Therefore, the processing machinery products corresponding to the high precision, high flexibility and high automation. Digital control of machine tool is to solve the one-piece, small batch, especially in the automatic processing of complex surface parts and ensure the quality requirement and produce.This design mainly consider two aspects: numerical control part and mechanical part. First compared the overall scheme of CNC lathe, and then determine the optimal scheme, to complete the overall layout of CNC lathe, draw the diagram of transmission system semi-closed-loop CNC lathe, CNC lathe overall contact map size. To the design of feed system, turret, spindle chuck through calculation of cutting force, the clamping hydraulic tailstock travel. To complete the overall design of the CNC lathe, general layout, drawing a connection dimension in general, and the body design, drawing machine parts drawing, base design, drawing the base part drawing. Analysis on the lathe vibration proposed method to strengthen the stiffness of machine tools, as well as the design of the CNC machine tool cutting device and a tail frame device. Finally, describes the machine daily maintenance and maintenance, is conducive to the normal operation of the machine.The expected results of design to meet the requirements of general machinery factory, half closed, slant bed lathe, CNC horizontal lathe, biaxial linkage, as far as possible to meet the need of production, reliability, CNC machine tools enable us to design the machining accuracy, speed range, operation comfort, efficiency and protection structure, other aspects are more suitable for practical use requirements.Key words: Half closed loop;CNC lathe;The overall design;II目录摘要 (I)ABSTRACT (II)目录 (III)1 绪论 (1)1.1 本课题的研究内容和意义 (1)1.1.1 本次课题的意义 (1)1.1.2 本次课题的目的 (1)1.1.3 本次课题的所要达到的技术要求 (1)1.2 国内外的发展概况 (2)1.2.1 国内外数控机床的形势 (2)1.2.2 数控机床未来发展趋势 (3)1.3 本课题应达到的要求 (4)2 数控机床总体方案的比较及其确定 (5)2.1 调研情况 (5)2.2 总体方案比较及确定 (5)2.2.1 机床的总体布局 (5)2.2.2 机床总体布局的基本要求 (5)2.2.3 影响总体布局的因素 (6)2.2.4 简述数控车床的特点 (6)2.2.5 数控车床总体设计方案1 (6)2.2.6 数控车床总体设计方案2 (8)2.2.7 数控车床总体设计方案的确定 (10)3 数控车床总体设计 (11)3.1 数控机床的工作原理 (11)3.2 数控机床的组成 (11)3.2.1 程序编制及程序载体 (11)3.2.2输入装置 (11)3.2.3数控装置及强电控制装置 (11)3.2.4伺服驱动系统及位置检测装置 (12)3.2.5 机床的机械部件 (12)3.3 参数确定 (13)3.3.1 主参数和基本参数 (13)3.3.2 切削用量的选择 (13)3.3.3 运动参数和动力参数的计算 (14)3.4 数控车床传动系统图 (14)3.5 数控车床总体联系图 (15)3.6 机床的润滑与维护 (17)4 数控车床部件设计 (18)4.1 机床底座,床身大件类的设计要求,方法 (18)4.2 机床的振动和提高刚度措施 (18)4.2.1 机床振动的类型 (18)4.2.2 提高机床结构动刚度的措施 (19)4.3 机床热变形的形成及其特点 (20)4.4 床身与底座的结构设计 (21)4.5 机床的隔振 (22)4.6 排屑装置的设计 (23)4.7 尾架装置的设计 (26)5 数控机床的维护与保养 (27)6 结论 (29)致谢 (30)参考文献 (31)附录 (32)IV半闭环数控车床总体设计1 绪论1.1 本课题的研究内容和意义1.1.1本次课题的意义随着科学技术发展,机械产品结构越来越合理,其性能、精度和效率日趋提高更新换代频繁,生产类型由大批大量生产向多品种小批量的生产转化。
因此,对机械产品的加工相应得提出了高精度、高柔性与高度自动化的要求。
大批大量的产品,如汽车,拖拉机和家用电器的零件,为解决高产优质的问题,多采用专用的自动生产线和自动化车间进行生产。
但是应用这些专用生产设备,生产准备周期增长。
在机械产品中,单件与小批量产品占到70—80%,这类产品一般都采用通用机床加工,当产品改变时,机床与工艺装备均需作相应的变换和调整,而且通用机床的自动化程度不高,基本上由人工操作,难于提高生产效率和保证产品质量。
特别是一些由曲线,曲面轮廓组成的复杂零件,只能借助靠仿形机床,或借助划线和样板用手工操作的方法来加工,加工精度和生产效率受到很大的限制。
数字控制机床就是为了解决单件、小批量、特别是复杂型面零件加工的自动化并保证质量要求而产生的。
柔性制造技术的发展,已经形成了在自动化程度和规模上不同的多钟层次和级别的柔性制造系统。
带有自动换刀装置的数控加工中心,是柔性制造的硬件基础,是制造系统的基本级别。
在多台加工中心机床或柔性制造单元的基础上,增加刀具和工件在加工设备与包装之间的流通传输和存贮,和必要的工件清洗和尺寸检查设备,并由高一级的计算机整个系统进行控制和管理,这样就构成柔性制造体统。
它可以实现多品种的全部机械加工或部件装配,DNC的控制原理是它的控制基础。
随着科学技术和制造工业的飞速发展,迫切需要实现机器的智能化和脑力劳动自动化,以便于适应市场产品需求多变的要求。
自动化制造技术不仅需要发展车间制造过程的自动化,而且要全面实现从生产决策,产品设计,市场预测直到销售的整个生产活动的自动化,特别是技术和管理科室的自动化,将这些要求综合成一个完整的生产制造系统,即所谓的计算机集成制造系统。