智能调节器文献综述
智能PID调节器
智能PID调节器的报告,800字
智能PID调节器是一种用于自动控制系统的控制装置,它可
以实现对机械及系统进行动态精确控制。
通过使用智能PID
调节器,我们可以达到位置控制,微分控制,速度控制,加速度控制,反馈控制,等等各种控制目的。
智能PID调节器的优点是具有快速、准确、可靠的调节功能,它的精度可达到毫米级以下,并且能够保持控制的精准度。
同时,它还可以根据不同的负荷,自动调整控制参数,以达到预期的控制效果。
此外,它还具有良好的静态性能和动态性能,可以提供较大的驱动输出,可以实现灵活的控制,确保控制性能同时高效、稳定、动态性能也很出色。
此外,智能PID调节器还具有可移植性,可以在不同的设备
上运行,可以综合使用PID算法,支持仿真等特殊功能。
综
合而言,智能PID调节器可以满足复杂的测控系统要求。
总之,智能PID调节器是一种具有很强功能性和稳定性的自
动控制装置,可以帮助我们达到良好的控制效果。
它可以根据不同的负载及运行状态,自动调整控制参数,确保控制性能同时高效可靠,是当前最好的选择之一。
基于PWM调光的智能多功能台灯设计文献综述
本科毕业设计(文献综述)题目基于PWM的智能多功能台灯设计姓名韦洋专业自动化学号 ********* 指导教师曹卫锋郑州科技学院电气工程学院二○一四年五月基于PWM的智能多功能台灯设计文献综述1 前言台灯是每个家庭的生活必需品,而普通的台灯功能简单,用途单一。
随着电子科技的发展,台灯作为人们经常使用的生活必需品也有着很大的发展。
逐步朝着多功能化,智能化的方向发展。
根据自身所学知识结合实际情况制作一种智能台灯,主要实现台灯的基本照明功能功能,能够智能的调节台灯亮度,能够显示室内温度,拥有万年历时钟功能。
随着家用电器的发展,作为家用电器当中的小台灯也要顺应科技的发展步伐走向智能化多功能化。
2台灯的发展的发展背景虽然按键式的台灯还是台灯市场的主体。
但是,随着现代电子技术的发展和人们的需求变化,传统的台灯已经感受到产品更新换代的威胁。
与其他的智能化家用电器一样,智能化台灯有许多普通按键台灯所无法比及的优势,智能化台灯一方面可以更节省电能,有利于环保。
现今台灯种类样式繁多,灯泡分为:节能灯,白炽灯,LED灯泡。
控制方式有:开关控制,触控式,亮度可调式,甚至声控。
LED 作为一种固态冷光源,是继白炽灯、荧光灯、高强度放电灯(如高压钠灯和金卤灯)之后的第四代新光源[1]。
基于白光LED 的固态照明,是一种典型的绿色照明方式[2]。
与传统光源相比,具有节能、环保、寿命长、体积小、安全可靠等特点,代表着照明技术的未来,并符合当前政府提出的“建设资源节约型和环境友好型社会”的要求。
3基于PWM调光的智能LED台灯的发展现状自LED光源进入通用照明领域,逐渐取代传统光源,日益占据照明的核心领域。
其除了耗能少、无污染、不含汞、寿命长等优点外,可控性强是LED光源区别于传统光源的鲜明特点。
因此,充分发挥LED的先天优势,让LED按照人们的照明需求,随时"可控可调",将使LED更为快速的占据照明领域的核心地位。
智能控制方法的应用及发展综述综述
智能控制方法的应用及发展综述1 智能控制的产生1.1智能控制产生的背景早期的自动控制基本上是解决简单对象的控制问题,人们追求研制完全自动运行不用人参与的自治系统。
随着控制对象的日益复杂,系统所处的环境因素、控制性能要求都列入了控制系统设计的考虑范围,已有的自动控制方法与技术受到了某种程度的挑战,尤其在学习控制研究与机器人控制方面,矛盾日渐突出,迫切需要为自动控制学科注入新的活力,智能控制正是在这样的背景下产生。
1.2智能控制的产生及发展智能控制思想最早是由美国普渡大学的傅京孙教授于60年代中期提出的,他在1965年发表的论文中率先提出把人工智能的启发式推理规则用于学习系统,这篇开创性论文为自动控制迈向智能化揭开了崭新的一页.接着,Mendel于1966年在空间飞行器的学习控制中应用了人工智能技术,并提出了“人工智能控制”的新概念;同年,Leondes和Mendel首次使用了“智能控制(Intelligent Control)”一词,并把记忆、目标分解等技术用于学习控制系统;这些反映了智能控制思想的早期萌芽,常被称为智能控制的孕育期.70年代关于智能控制的研究是对60年代这一思想雏形的进一步深化,是智能控制的诞生和形成期.1971年,傅京孙发表了重要论文,提出了智能控制就是人工智能与自动控制的交叉的“二元论”思想,列举三种智能控制系统:人作为控制器、人机结合作为控制器、自主机器人;1974年,英国的Mamdani教授首次成功地将模糊逻辑用于蒸汽机控制,开创了模糊控制的新方向;1977年,Saridis的专著出版,并于1979年发表了综述文章、,全面地论述了从反馈控制到最优控制、随机控制及至自适应控制、自组织控制、学习控制,最终向智能控制发展的过程,提出了智能控制是人工智能、运筹学、自动控制相交叉的“三元论”思想及分级递阶的智能控制系统框架.80年代,智能控制的研究进入了迅速发展时期:1984年,Astrom发表了论文,这是第一篇直接将人工智能的专家系统技术引入到控制系统的代表,明确地提出了建立专家控制的新概念;与此同时,Hopfield提出的Hopfield网络及Rumelhart提出的BP算法为70年代以来一直处于低潮的人工神经网络的研究注入了新的活力,继60年代Kilmer和McClloch 提出KBM模型实现对“阿波罗”登月车的控制之后,人工神经网络再次被引入控制领域,并迅速得到了广泛的应用,从而开辟了神经网络控制;1985年8月,IEEE在美国纽约召开了第一界智能控制学术讨论会;1987年1月,在美国费城由IEEE控制系统学会与计算机学会联合召开了第一界智能控制国际会议,这标志着智能控制作为一门新学科正式建立起来.进入90年代,关于智能控制的研究论文、著作、会议、期刊大量涌现,应用对象也更加广泛,从工业过程控制、机器人控制、航空航天器控制到故障诊断、管理决策等均有涉及,并取得了较好的效果.2智能控制概念及应用2.1智能控制的定义智能控制至今为止并没有一个公认的、统一的定义。
智能PID控制综述简版

智能PID控制综述智能PID控制综述引言PID(Proportional-Integral-Derivative)控制是工业领域中最常用的控制算法之一。
它通过测量系统的误差(偏差)、积分误差和误差变化率,并通过调整控制信号来稳定系统。
然而,传统的PID控制算法在面对复杂系统、非线性系统或时间变化较大的系统时可能表现不佳。
为了解决这些问题,研究人员开发了智能PID控制算法,以提高控制系统的性能与稳定性。
智能PID控制算法智能PID控制算法是一种利用智能技术来改进传统PID控制算法的方法。
它主要包括模糊PID控制、神经网络PID控制和遗传算法PID控制等。
模糊PID控制模糊PID控制是一种基于模糊逻辑的控制方法。
它通过将PID 控制器的参数转化为模糊变量,并根据系统的误差和误差变化率来确定输出。
相比传统的PID控制,模糊PID控制在系统非线性程度较高时表现更好,具有较强的鲁棒性。
神经网络PID控制神经网络PID控制是一种利用神经网络模型来优化PID控制器参数的方法。
通过训练神经网络模型,可以实现对PID控制器输出进行非线性映射,从而提高控制系统的性能。
神经网络PID控制在处理非线性系统和大规模系统时表现出色。
遗传算法PID控制遗传算法PID控制是一种利用遗传算法来求解PID控制器参数的方法。
通过定义适应度函数,并利用遗传算法的运算过程进行迭代优化,可以找到适合当前系统的最优PID参数。
遗传算法PID控制在处理具有多个变量和复杂约束条件的控制问题时具有较好的适应性。
智能PID控制在实际应用中的优势智能PID控制算法相较于传统PID控制算法,在实际应用中具有以下优势:1. 提高控制系统的鲁棒性:智能PID控制算法对于系统非线性程度较高或者存在参数变化的情况下,具有较好的鲁棒性。
2. 提高控制系统的性能:智能PID控制算法通过优化PID控制器参数,可以进一步提高控制系统的性能指标,如响应速度、稳定性和鲁棒性等。
智能PID控制综述

智能PID控制综述密封线智能PID控制综述摘要传统的PID控制应用于复杂的实际系统时存在一定的局限性,因而智能PID控制器是当今研究的热点。
融合了先进智能控制思想和传统PID构成的智能PID控制器则具有更加良好的特性。
文中对几种常见的智能PID控制器,包括模糊PID、神经网络PID、专家PID控制器及基于遗传算法的PID控制器等进行了综述。
关键词 PID控制器智能控制智能PID一、引言PID控制[1-10,51-52]作为经典控制算法中的典型代表,是一种传统的控制方式。
1922年 N.Minorsky 提出PID控制方法,1942年美国Taylor仪器公司的J.g.ziegler和 N.B.Nichols提出PID参数[1]的最佳调整法至今,其在工业控制中的应用已十分广泛[2-4]。
PID控制具有结构简单、参数物理意义明确和鲁棒性强等特点。
PID控制器[5-9]对系统给定值()r t同系统输出值()y t的偏差()e t分别进行比例、积分、微分运算,并由此得到其输出值()u t,计算公式为:密 封 线0()()()()()t P L D de t u t K e t K e t d t K dt =++⎰式中P K 为比例系数;LK 为积分系数;D K 为微分系数。
P K 、L K 、DK 可对系统的稳定性、稳态精度、响应速度和超调量等性能产生影响,它们的作用分别为:(1)比例系数PK 可以加快系统的响应速度,提高系统的调节精度。
系统的响应速度和调节精度同PK 呈正相关,但P K 过大则会产生超调,使系统不稳定,PK 过小则会使响应速度变慢,使系统静、动态特性变坏。
(2)积分作用系数L K 可以消除系统的稳态误差。
L K 越大,系统静差就会越快消除。
但LK 过大会在响应过程产生较大超调,产生积分饱和现象。
LK 过小则会使系统稳态误差不易消除,影响调节精度。
(3)微分作用系数D K 可以改善系统的动态性能。
基于单片机的智能调节器设计毕业论文
毕业设计说明书题目:基于单片机的智能调节器设计基于单片机的智能调节器设计摘要智能仪器就是以单片机为主体,将计算机技术与测量控制技术结合在一起而组成的“智能化测量控制系统”。
智能仪器具有自动操作、数据处理和友好的人机对话等传统仪器无法比拟的优点,因而在各个领域都有着广泛的应用。
随着微电子技术和信息技术的发展,智能仪器将会向着微型化、多功能化和网络化的方向发展。
本设计以高性能的80C196KB单片机为核心,辅以必要的外围器件,来完成调节器的各项功能。
同时,本调解器还具备了初步的智能化。
在硬件电路设计中,本文详细介绍了各电路模块的设计方法,并且也给出了键盘、显示、通讯和打印的外围电路设计;在软件设计部分,本文介绍了单片机软件程序的流程和设计。
本文还讨论了软硬件抗干扰的方法。
最后,针对设计中的问题和不足,提出了一些建议和改进方法。
关键词:智能仪器;调节;单片机;PID控制The Design of Intelligent Regulator Based on MCUAbstractIntelligent instrument is a kind of intelligent measuring and controlling system that combines computer technology and measuring and controlling technology with MCU being its main body. Intelligent instrument has many strong-points which traditi onal instrument hasn’t, such as automatic operation, data processing and friendly man-machine conversation function. So, it can be applied widely in all kinds of fields. With the rapid development of microelectronics and information technology, intelligent instrument will develop in micromation, multifunctional and network direction.This design take the high-performance MCU 80C196KB as the core, and auxiliary by necessary periphery component, to complete the regulator's functions. At the same time, this regulator also has the preliminary intellectualization. On the hardware circuit design, this paper describes various circuit modules in detail, and also gives the peripheral circuit design of the keyboard, the display, the communication and the print; In the part of software design, this paper shows the compiling and flow of software of MCU. Finally, in view of the problems and insufficiencies in this design, some recommendations and advices are presented.Key words: Intelligent Instrument; Regulate; MCU; PID Control目录摘要 (I)Abstract (II)第一章引言 (1)1.1 调节器概述 (1)1.2 模拟调节器 (2)1.3 数字调节器 (3)1.4 智能调节器 (3)1.4.1 智能调节器的结构 (3)1.4.2 智能调节器的特点和基本功能 (5)1.4.3 智能调节器的优越性 (6)第二章智能调节器方案选择 (7)2.1 微处理器的选择 (7)2.2 控制算法的选择 (8)2.2.1 PID控制的基本原理 (8)2.2.2 PID控制算法及特点 (9)第三章智能调节器硬件电路设计 (17)3.1 智能调节器硬件电路总体方案设计 (17)3.2 最小单片机系统设计 (18)3.2.1 80C196KB单片机 (18)3.2.2 地址锁存器74LS373的应用 (21)3.2.3 程序存储器27128的应用 (22)3.2.5 译码器74LS138的应用 (25)3.3 前向通道设计 (26)3.3.1 数据选通器4052A的应用 (26)3.3.2 运算放大电路 (27)3.3.3 A/D转换 (28)3.4 人机交互接口设计 (29)3.4.1 键盘电路设计 (29)3.4.2 显示系统设计 (32)3.5 后向通道设计 (36)3.5.1 D/A转换 (36)3.5.2 V/I转换 (37)3.6 通信接口设计 (38)3.6.1 通信接口标准的选择 (38)3.6.2 MAX485芯片简介 (39)3.6.3 MAX485在智能调节器中的应用 (39)3.6.4 单片机与PC机串行通信系统构成 (40)3.7 电源设计 (40)3.7.1 直流稳压电源的组成 (40)3.7.2 直流稳压电源的原理 (40)3.7.3 直流稳压电源的应用 (41)3.8 其它芯片的应用 (42)3.8.1 看门狗芯片MAX705的应用 (42)3.8.3 总线收发器74LS245的应用 (44)第四章智能调节器软件系统设计 (45)4.1 主程序设计 (45)4.2 功能子程序设计 (46)4.2.1 A/D转换子程序 (46)4.2.2 标度变换子程序 (47)4.2.3 键盘子程序 (48)4.2.4 显示子程序 (50)4.2.5 PID控制算法子程序 (51)4.2.6 D/A转换子程序 (52)第五章智能调节器抗干扰设计 (53)5.1 干扰的形成 (53)5.2 硬件抗干扰设计 (53)5.2.1 切断干扰传播路径 (53)5.2.2 提高敏感器件的抗干扰性能 (54)5.2.3 本设计中的其它抗干扰措施 (54)5.3 软件抗干扰设计 (55)5.3.1 看门狗技术 (55)5.3.2 数字滤波法 (56)5.3.3 开关量的软件抗干扰 (56)第六章调试与总结 (57)6.1 系统调试 (57)6.2 设计总结 (58)参考文献 (59)附录A 硬件电路连接图 (61)附录B 源程序 (62)致谢 (78)第一章引言在过去的几十年中,传统的电动单元组合仪表曾在工业测控领域里发挥过重要作用,但是随着科技进步,工业生产中的自动化程度越来越高,使得许多传统的单一功能的模拟仪表已不能完全满足生产过程及工业现场控制系统的需要。
PID数字励磁电压调节器设计【文献综述】
毕业设计文献综述电气工程及其自动化PID数字励磁电压调节器设计一、前言励磁系统是有励磁功率单元和励磁调节器构成,其中励磁调节器是励磁系统的重要组成部分。
它可以根据发电机的运行状态,自动调节励磁功率单元输出的励磁电流大小,从而满足发电机的运行要求。
在这里,励磁调节器可以概括为两大作用:在稳态运行时,它能够保持发电机在运行中电压稳定,同时在并行运行中,能够调节无功功率的分配,提高静态稳定极限,抑制自励磁,增加充电线路允许长度;在暂态过程中,能够抑制切断负荷时电压的升高和提高暂态的稳定性【4】。
在起初的励磁系统中,利用直流发电机做为励磁功率单位,形成直流励磁机励磁方式。
之后随着大功率半导体元件的广泛采用,以半导体整流器为励磁功率单元的励磁方式得到了广泛的应用,同时出现了交流励磁方式和静态励磁方式。
尤其是静态励磁方式,其励磁电源取自发电机本身,用励磁变压器做为整流器装置,整个励磁装置没有转动部分,实现了全静态励磁系统【7】。
近年来,伴随着数字控制技术、计算机技术和现代控制理论日益成熟,微型计算机应用于励磁系统的发展趋势逐日加快,数字励磁控制系统逐步取代了以晶体管或集成电路构成的传统的模拟式励磁控制系统。
数字励磁调节器(或微机励磁调节器)不仅能实现模拟励磁调节器的全部调节控制功能,而且还具有其所不具备的多种控制功能,它与模拟控制系统的区别主要是微机处理控制过程呈数字代码形式,控制算法由微处理器通过程序实现。
近年来,各种基于微处理器的数字励磁调节器以其硬件结构简单、清晰、设备通用性好、标准化程度高、软件灵活、能够可靠实现多种功能和满足各种控制规律的要求,在电力系统中得到广泛应用。
比如模糊控制,这种控制方法做为智能控制的一个重要分支,在控制领域获得了广泛应用,它不需要精确的控制对象数学模型,可使用自然语言方法控制方法易于掌握,具备良好的鲁棒性,能够大范围的适应参数变化,与常规PID控制相比,具有优良的动态响应。
浅议智能调节器在过程控制系统中的应用
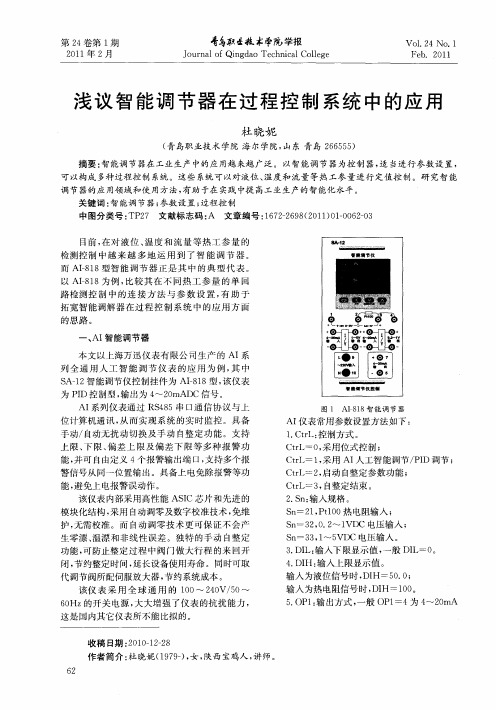
C =1为 内部 给 定 , F 正作用 调节 ; C 一8为外 部给定 , 作用 调节 ; F 反 C =9为外部 给定 , F 正作 用 调节 。
手 动/ 自动无扰 动 切换 及 手 动 自整定 功能 。支 持 上 限 、 限、 差 上 限 及 偏 差 下 限等 多 种 报 警 功 下 偏 能, 并可 自由定 义 4 报警输 出端 口, 个 支持多个 报 警 信号从 同一位 置输 出 。具备 上 电免 除报警等 功 能, 避免 上 电报警 误动 作 。 该仪 表 内部 采用高 性能 AS C芯 片和 先进 的 I 模 块化结 构 , 用 自动 调零及数 字校 准技术 , 采 免维 护, 无需 校准 。而 自动 调零 技 术 更可 保 证不 会 产 生零漂 、 温漂 和 非线 性误 差 。独 特 的手 动 自整 定 功能 , 防止整 定过 程 中阀 门做 大行 程 的来 回开 可 闭 , 约整定 时间 , 节 延长 设备使 用寿命 。同时可取
杜 晓妮
( 岛职 业技 术 学院 海 尔学院 , 东 青 岛 2 6 5 ) 青 山 6 5 5
摘 要 : 能调 节 器在工 业生产 中的应 用越 来越 广泛 。 以智能调 节 器为控 制 器 , 当进 行 参数 设 置 , 智 适 可 以构成 多种过 程控制 系统 。这些 系统可 以对液位 、 温度 和 流量 等 热工参 量 进行 定值 控 制 。研 究智 能
调 节 器的应 用领 域和使 用方 法 , 有助 于在 实践 中提 高m _ 生产 的智能化 水平 。 , l k 关键 词 : 能调节 器 ; 智 参数 设置 ; 程控 制 过
智能家居管理系统论文开题报告及文献综述终极版
智能家居管理系统论文开题报告及文献综述终极版武夷学院本科生毕业论文附册论文题目智能家居控制系统作者姓名唐超凡院系:电子系专业:电子信息工程班级: 08电信(1)班学号: 20084081020指导教师:职称(或学位):2012年6月1日目录1. 武夷学院毕业论文(设计)任务书2. 武夷学院论文题目的文献综述3. 武夷学院本科毕业论文(设计)开题报告4. 武夷学院本科生毕业论文(设计)中期检查表5. 武夷学院本科毕业论文(设计)指导教师评分表6. 武夷学院本科毕业论文(设计)评阅登记表(A,B)7. 武夷学院毕业论文(设计)答辩记录8. 武夷学院本科毕业论文(设计)答辩评议意见及成绩评定9. 武夷学院本科毕业论文(设计)成绩单10.武夷学院毕业论文指导记录武夷学院毕业论文(设计)任务书2012届电子系08电信(1)班专业(班级)学生姓名唐超凡学号20084081020课题名称智能家居管理系统一、毕业论文(设计)的主要任务随着现代人生活水平的提高,生活节奏越来越快,对家用电器的高效控制的要求也越来越迫切。
本次设计一套基于GSM和AVR单片机的智能家居控制系统,实现控制者通过给GSM模块发送短信息指令以控制外围设备的目的,包括控制指定电器,开关电子门等多种功能。
它的成本价并不高昂,适合于普通大众使用,有着广阔的市场前景。
其中GSM模块用于接受管理员的短信息,并传送到单片机控制系统。
单片机控制系统基于AVR单片机,处理来自GSM模块的信息,并根据预先设定的程序和短信命令来控制家居电器,以及控制GSM模块给管理员发送相关信息,使得控制者和系统可以进行交互。
独有的红外防盗报警系统,可以在家中出现可疑人时立刻通过短信向主人报告。
二、毕业论文(设计)的要求(含成果反映形式)1 对家电进行远程控制2 对短信远程控制家电的硬件电路的设计3 完成硬件电路设计及调试三、进度计划及指导安排自2012年3月6号:第1-3天:查找资料,熟悉智能家居控制系统的设计原理,给出设计总体方案;第4-20天:各模块的详细设计;第21-30天:硬件连线,调试;第31-45天:程序设计;第46-60天:写毕业设计报告;任务书审定日期:年月日指导教师(签字)任务书批准日期:年月日教研室主任(签字)任务书下达日期:年月日学生(签字)唐超凡注:本表在所报课题审查批准后由指导教师填写(A4纸双面打印一式两份),经教研室主任审阅签字,一份下达给学生,一份交院系备查。
智能电风扇控制系统设计【文献综述】

毕业论文文献综述机械设计制造及其自动化智能电风扇控制系统设计1、国内外研究现状单片机在近10年取得了飞速的发展。
在世界范围内从事单片机开发的有4个区域: 一是欧美,开发厂家及其最新单片机系列产品有National SemI conductor的CO P8系列单片机;美国SCEN IX公司的8位单片机系列; PH IL IPS 的51系列单片机;美国AMD 公司的186系列16位嵌入式微控制器;ST Microelect ron ics公司的ST 62 系列单片机;MICROCH IP 的PIC系列单片机;MOTOROLA的各个系列单片机以及Inf ineon techno logies 的C500和C166 系列等。
二是日本,TO SH IBA公司开发了从4位到64位的多系列单片机;日立公司也有从4位到32位的单片机;另外还有FUJITSUM icro electronics 的F2MC28L微控制器系列产;OKI Electronics 的MSM 80、MSM 66、MSM 63系列单片机;NEC的75X、78X 系列微机。
三是台湾地区,主要有WINBOND公司的W741W 536、W78W 77等系列产品微控制器; HOL TEK的HT 464 74849CXX系列微控制器;EMC公司的E78系列单片机等。
四是韩国,主要有HYUNDA Imicro electronics的GMS800、GMS30系列微控制器;另外还有LG等公司也生产单片机。
由此可见单片机发展到今天可以说是种类繁多,性能各异。
在过去的一段时间内, 单片机的指令运行速度一直在10M IPS 以下, 这对于应用在工业控制领域内的单片机来说是足够了,但当单片机被应用在通讯及DSP 领域作为高速运算、编码或解码时, 就会出现因指令运行速度不够而限制单片机应用的情形, 因此提高单片机指令运行速度已经成为迫切需要解决的问题。
纵观单片机的发展过程,可以预示单片机的发展趋势,大致有:1.低功耗CMOS化;2.微型单片化;3.主流与多品种共存。
关于智能控制的文献综述
关于智能控制的文献综述一、智能控制概述智能控制,也称为自动化智能控制,是一种将人工智能理论与控制理论相结合的技术。
它通过模拟人类思维模式,实现对复杂系统的智能化控制。
智能控制的目标是提高系统的性能,优化系统的运行状态,以满足各种实际应用的需求。
二、智能控制发展历程智能控制的发展可以分为四个阶段:萌芽期、形成期、成熟期和最新发展阶段。
萌芽期主要是在20世纪50年代,人工智能和控制理论开始被独立研究;形成期是在20世纪70年代,随着计算机技术的发展,人工智能和控制理论开始融合;成熟期是在20世纪90年代,智能控制的相关理论和技术开始应用于各个领域;最新发展阶段是从21世纪初至今,随着物联网、大数据、云计算等新技术的出现,智能控制得到了更广泛的应用和发展。
三、智能控制的主要技术智能控制的主要技术包括专家控制、模糊控制、神经网络控制和遗传算法等。
这些技术通过模拟人类的思维模式,实现对系统的智能化控制。
其中,专家控制是基于专家知识的控制;模糊控制是通过模糊逻辑理论的控制;神经网络控制是通过模拟人脑神经元网络的控制方式;遗传算法是一种基于生物进化理论的优化算法。
四、智能控制在各领域的应用智能控制已被广泛应用于各个领域,如工业自动化、航空航天、医疗保健、农业等。
在工业自动化领域,智能控制可以实现生产线的自动化检测、控制和优化;在航空航天领域,智能控制可用于飞行器的自主导航、自主控制和自主决策;在医疗保健领域,智能控制可用于医疗设备的智能化操作和病人的智能化监护;在农业领域,智能控制可用于智能化灌溉、智能化施肥和智能化养殖等。
五、智能控制面临的挑战与展望智能控制面临的挑战包括如何提高控制的精度和稳定性、如何处理大规模复杂系统的控制问题、如何降低控制成本和提高经济效益等。
展望未来,随着新技术的不断涌现和应用,智能控制将面临更多的挑战和机遇。
未来智能控制的发展方向包括:更加智能化、更加自主化、更加集成化、更加网络化等。
窗户窗帘的智能化控制系统的设计 毕业论文 优秀毕业论文及文献综述

窗户窗帘的智能化控制系统的设计摘要本设计主要是用于家庭及宾馆安装智能控制性的窗户、窗帘系统设计。
智能化的窗户、窗帘控制系统具有防风、防雨、防盗、无线遥控、自动检测控制与报警、安全控制优先与自动保护等全部功能,所有功能控制都具有高稳定高可靠性高灵敏度高人性化等的自动检测控制。
本系统以单片机为核心,辅于必要的外部电路,通过使用压力传感器,湿度传感器,一体化人体红外传感器,无线发射与接收为输入装置,控制窗户、窗帘的电机及报警电路为输出装置,实现日常生活中智能化控制窗户窗帘的检测风雨窃贼入侵等,本系统采用单片机芯片AT89S52,通过软件编程控制,L297和L298控制步进电动机正转与反转,运用单片机内部的定时中断输出固定频率控制步进电机的转速,通过计算输出脉冲的个数来监控步进电机的行程,从而达到窗户窗帘的开与关功能和有窃贼入侵的报警功能。
为完善系统的可靠性,实现简单便捷的操作,我们还设计了无线遥控操作的功能,还通过软件控制脉冲输出频率及脉冲个数来控制步进电机的转速和位移量。
关键字:AT89S52,L297,L298,压力传感器,湿度传感器,一体化人体红外传感器,无线遥控发射与接收器,报警器,步进电动机,定时中断,脉冲计数,等待模式。
abstractThis design is mainly uses in the family and the guesthouse installment intelligence control window, the window blind system design. The intellectualized window, the window blind control system has windproof, rainproof, security, the wireless remote control, the automatic detection to control and to report to the police, the safety control first with the automatic protection and so on complete function, all functional control has high stable redundant reliable high sensitivity high user-friendly and so on automatic detection control. This system take the monolithic integrated circuit as a core, auxiliary in essential exterior electric circuit, through the working pressure sensor, the humidity sensor, the integrated human body infrared sensor, the wireless launch and the receive is the input device, controls the window, window blind's electrical machinery and the alarm circuit is the output device, realizes in the daily life the intellectualized control window window blind's examination wind and rain thief invasion and so on, this system uses monolithic integrated circuit chip AT89S52, through the software programming control, L297 and the L298 control step-by-steps the electric motor clockwise and the reverse, step-by-steps electrical machinery's rotational speed using the monolithic integrated circuit interior's timer interruption output fixed frequency control, monitors through the computation output pulse's integer step-by-steps electrical machinery's traveling schedule, thus achieves window window blind's opening withCloses the function and has the warning function which the thief invades. For the consummation system's reliability, realizes the simple convenient operation, we have also designed the wireless remote control function, but also controls through the software control pulse output frequency and the pulse integer step-by-steps electrical machinery's rotational speed and the displacement quantity.Key words: AT89S52, L297, L298, the pressure transmitter, the humidity sensor, the integrated human body infrared sensor, controls remotely the launch and the receiver wireless, the alarm apparatus, step-by-steps the electric motor, timer interruption, pulse counting, waiting pattern.目录窗户窗帘的智能化控制系统的设计 (I)window window blind's intellectualization control system's design (II)目录 (III)0绪论 (1)1 系统设计 (2)1.1 设计任务及要求 (2)1.2 总体设计方案 (4)1.3 本章小结 (6)2 各功能模块的工作原理及部分程序 (7)2.1 主程序控制模块 (7)2.2 步进电机的控制模块 (16)2.3压力与湿度检测模块及流程图 (18)2.4 红外检测与遥控模块及流程图 (22)2.5报警功能模块电路及流程图 (26)2.6 电源模块 (28)2.7手动功能概述 (32)2.8本章小节 (32)3 设计的总体电路的工作原理介绍 (33)4 软件调试 (33)5 扩展及展望部分 (34)5.1 扩展 (34)5.2 展望 (34)总结 (35)致谢 (36)参考文献 (37)附录 (38)0 绪论本设计主要是设计用于家庭及宾馆安装智能控制性的窗户、窗帘。
智能温度控制系统 文献综述

内蒙古科技大学信息工程学院测控专业毕业实习报告——文献综述题目:电阻炉温度控制系统设计学生姓名:贾旺学号:0967112301专业:测控技术与仪器班级:测控2009-3指导教师:左鸿飞前言电阻炉被广泛地应用在工业生产中,它的温度控制效果直接影响到生产效率和产品质量,因而工业生产对温度控制系统的要求很高。
目前电阻炉通常采用常规PID 控制,但是电阻炉的温度控制具有非线性、大惯性、大滞后等特点,难以对其建立精确的数学模型,因而常规PID控制难以取得良好的控制效果。
因此,设计一个控制精度高、运行稳定的电阻炉温度控制系统具有很高的应用价值。
本文以电阻炉为控制对象,以UP550程序调节器为硬件核心,采用PID控制方法,设计一种控制精度高的温度控制系统。
在文中详细阐述了控制系统的硬件设计和控制方法。
本系统的温度检测电路集成在UP550程序调节器中,简化了系统的硬件设计,提高了温度检测的精度。
在输出控制中主要采用硬件电路实现,降低了程序的复杂性。
在系统的硬件电路中采用了抗干扰设计,增强了系统的抗干扰能力。
常规PID控制算法简单、易于实现,适用于可建立精确数学模型的确定性控制系统。
而实际工业生产过程往往具有非线性和时变性,难以建立精确的数学模型,因此常规PID控制器不能达到理想的控制效果。
但通过UP550程序调节器可以同时设定多组PID参数,根据不同温度段特性更改PID参数弥补了常规PID控制的不足。
采用常规PID控制和论文设计的控制系统在电阻炉上进行控制实验,并对控制效果进行分析,结果表明,该控制系统的控制效果优于常规PID,具有超调小、控制精度高、抗扰性强、运行稳定等优点,具有较好的应用前景。
第一章绪论1.1 课题背景和意义从20世纪20年代开始,电阻炉就在工业上得到使用。
随着科学技术的发展,电阻炉被广泛的应用在冶金、机械、石油化工、电力等工业生产中,在很多生产过程中,温度的测量和控制与生产安全、生产效率、产品质量、能源节约等重大技术经济指标紧紧相连。
智能电压调节器在电力系统中的应用研究
智能电压调节器在电力系统中的应用研究一、引言电力系统是现代社会不可或缺的基础设施之一,其稳定运行对于保障工农业生产和人民生活至关重要。
然而,在电力系统中,电压波动是一个普遍存在的问题,它可能导致电力设备损坏、影响用电质量以及不稳定的供电现象。
因此,为了保障电力系统的可靠性和稳定性,智能电压调节器被引入电力系统中。
本文将对智能电压调节器在电力系统中的应用研究进行分析和讨论。
二、智能电压调节器的原理与技术1. 原理智能电压调节器是一种能够根据电力系统中发生的电压波动,在实时监测、分析和处理的设备。
它通过自动调整变压器的输出电压,来保持系统中的电压稳定在合理范围内。
传统的电压调节器主要依靠人工控制,且反应时间长,调节效果不佳。
而智能电压调节器结合了微电子技术、通信技术和人工智能等先进技术,具有快速响应、精确控制和自动化管理等优点。
2. 技术智能电压调节器的核心技术包括传感器、数据采集与处理、通信与网络以及控制算法。
传感器技术用于实时监测电力系统中的电压变化,并将数据传输到数据采集与处理系统中进行处理。
通信与网络技术用于实现电压调节器与电力系统其他设备之间的信息共享和远程控制。
控制算法则是智能电压调节器能够实现响应和控制的核心部分,它根据输入的电压波动信号,通过计算得出合理的输出电压值,并将其传输给变压器进行调节。
三、电力系统中智能电压调节器的应用1. 提高电力质量智能电压调节器可以快速响应和调整电力系统中的电压波动,确保电力质量在合理范围内。
例如,在工业生产中,电压波动可能导致设备故障或生产线停工,而智能电压调节器可以及时调整输出电压,避免这些问题的发生,提高电力系统的可靠性和稳定性。
2. 节能降耗电力系统中智能电压调节器的应用还可以实现节能降耗的效果。
智能电压调节器可以根据电力负荷的变化和用电需求的差异,动态调整输出电压。
通过实时监控和调整电压,可以减少电能损耗,达到节能的目的。
3. 保护电力设备智能电压调节器能够对电力系统中的电压波动进行及时监测,并采取相应的控制措施,保护电力设备免受电压异常的损害。
控制工程文献综述
工程控制基础文献综述院系:班级:姓名:学号:一、引言本学期初步学习了工程控制基础,为了更好地了解和学习该门课程,我通过网络渠道搜集了十篇有关工程控制的期刊文献.深入阅读后,我进行了总结,并对工程控制有了一定深度的理解。
本文是对搜集和阅读的文献的综述,旨在简要的介绍工程控制的发展和应用。
我所搜集的期刊均来自中国知网,其中包括工程控制的发展史和在车辆、电力及机器人方面应用的文献.二、文献综述1.智能控制工程研究的进展自1985年在纽约召开第一届智能控制学术会议至今,智能控制已经被广泛研究应用于工业、农业、服务业、军事航空等各个领域.近年来,随着人工智能技术和其他信息处理技术,尤其是信息论、系统论和控制论的发展,智能控制在控制机理和应用实践方面均取得了突破性的进展。
遗传算法与模糊逻辑、神经网络相互融合,通过模拟人类思维方式和结构来设计用于解决复杂的各种非线性问题的控制策略,并已在各种实际工程项目中得到应用,取得了良好的效果.分布式人工智能中的Agent和Multi Agent System已成为研究的热点,构建基于Agent的集散递阶结构的智能控制系统为智能控制注入了新的活力。
在理论研究取得进步的同时,国内外的研究者均意识到智能控制的研究不能只停留在计算仿真的层次上,智能控制应该直接面向传统控制难以或无法解决的复杂的非线性系统,面向实际工程应用。
2.车间运输小车的智能控制工厂运输是协调生产的重要环节和工厂设施的重要组成部分,它的效率直接影响生产成本及生产率.目前,加工中小产品机械加工车间运输系统主要有空间运输和地面运输两种.空间运输主要是小吨位桥式起重机和电动葫芦,其控制方式多为下拉线式,这种方式有以下缺点:1)设备复杂,功率消耗大,投资高。
2)操作不方便,运输效率低.3)只适应车间内部运输。
地面运输主要采用叉车及手推运料小车,叉车需专人驾驶且无固定轨道,在车间内运行极不安全,手推运料小车需人为动力,劳动强度大,运输效率低。
智能调节器设计

摘要随着自动化程度在工业等各个领域的不断加深,自动化领域对各类仪器仪表的要求也不断的提高。
早期的模拟仪表控制系统被用单片机、计算机和可编程序控制器作为控制器的集中数字控制系统逐步取代,它克服了模拟仪表控制系统的缺点,对传统的仪表提出了新的要求。
本设计就是针对在单回路控制系统中的调节器,以AT89C51单片机为核心,结合ADC0832、DAC0832、74ALS573、LED、键盘等部件,设计了硬件原理图及软件程序,组成一个智能调节器。
通过将来自变送器的测量值与给定值相比较后产生的偏差进行比例(P)、积分(I)、微分(D)的PID运算,经AD转换后将信号送给单片机进行处理,随后将处理后的数据使用DA转换器输出给执行机构,去控制执行机构的动作。
以达到对温度、压力、液位、流量等变量的控制。
关键词:智能调节器;AT89C51;ADC0832;DAC0832;PIDThe design of intelligent regulatorAbstractWith the degree of automation in industry and other fields have been deepened, the field of automated instrumentation for all types of requirements have been raised. The early instrument control system was gradually replaced by the concentration of digital control system which use single-chip, computers and programmable logic controller as controller . It overcomes the analog instrument control system of the shortcomings, and traditional instrument has made new demands.The design is in the single-loop control system to AT89C51 single-chip microcomputer as the core, combined with ADC0832, DAC0832, 74ALS573, LED, keyboard parts, design of the hardware schematic and software programs, they are composed of the intelligent regulator. By the measured values from the transmitter and compared to the value given after the deviation to the proportional (P), integral (I), differential (D) of the PID computation. After conversion by the AD to the single-chip signal processing, then the data will be processed using the DA converter output to the implementing agencies, to control implementing agency’s the action. It achieves to control variables such as temperature, pressure, liquid level, flow and so on.Key words: intelligent regulator;AT89C51;ADC0832;DAC0832;PID目录摘要 (I)Abstract (II)第一章引言 (1)1.1 智能调节器介绍 (1)1.1.1 智能仪表的概述 (1)1.1.2 智能仪表的国内外发展概况 (2)1.2 智能调节器的特点 (4)1.3 智能调节器发展的推动技术 (5)1.4 本设计的主要内容 (7)第二章智能调节器方案设计 (9)2.1 控制仪表与控制系统 (9)2.2 PID调节器 (10)2.3 方案设计 (14)第三章智能调节器的硬件设计 (15)3.1 硬件电路总设计图 (15)3.2 单片机的选用 (15)3.2.1 AT89C51单片机简介 (15)3.2.2 AT89C51的管脚说明 (17)3.3 A/D转换器ADC0832 (20)3.3.1 ADC0832简介 (20)3.3.2 ADC0832转换器功能介绍 (20)3.3.3 ADC0832的工作原理 (22)3.4 74ALS573的介绍 (24)3.5 D/A转换器DAC0832 (25)3.6 显示模块 (27)3.7 键盘电路 (28)第四章智能调节器的软件设计 (30)4.1 主程序软件设计 (30)4.2 按键扫描函数 (30)4.3 模数转换子程序 (32)4.4 显示处理函数 (32)4.5 显示子函数 (34)4.6 数模转换子程序 (34)第五章调试 (36)第六章总结 (37)参考文献 (38)附录A原理图 (40)附录B源程序 (40)附录B源程序 (41)致谢 (55)第一章引言1.1智能调节器介绍1.1.1智能仪表的概述随着自动化程度在工业等各个领域的不断加深,自动化领域对各类仪器仪表的要求也不断的提高。
智能控制中PID控制器的运用及其仿真【文献综述】

毕业设计文献综述电气工程与自动化智能控制中PID控制器的运用及其仿真当今的自动控制技术都是基于反馈的概念。
反馈理论的要素包括三个部分:测量、比较和执行。
测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。
PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。
PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
然而由于现代工业生产过程日益复杂,被控对象往往具有不同程度的非线性模型不确定性和参数时变性,常规的PID控制对过程的精确控制则显得力不从心。
所以随着控制系统的发展,智能控制在近年来得到了长足的发展。
将智能控制和常规的PID控制方法相结合,利用智能控制对PID控制的参数进行整定,形成了许多智能PID控制器。
智能PID控制器不但具有传统PID控制直观实现简单和鲁棒性好等特点,而且智能控制具有对复杂系统进行有效的全局控制的能力和自学习自组织和自适应能力。
PID控制是控制工程中技术成熟、应用广泛的一种控制策略,经过长期的工程实践,已形成了一套完整的控制方法和典型的结构。
它不仅适用于数学模型已知的控制系统中,而且对于大多数数学模型难以确定的工业过程也可应用,在众多工业过程控制中取得了满意的应果。
在当前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志的条件下,控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口、执行机构,加到被控系统上;控制系统的被控量,经过传感器、变送器、通过输入接口送到控制器。
不同的控制系统,其传感器、变送器、执行机构是不一样的。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器,其中PID 控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内蒙古科技大学信息工程学院测控专业毕业实习报告——文献综述题目:基于单片机的智能调节器设计学生姓名:000学号:00专业:00班级:00指导教师:00一、引言1、调节器作用调节器将来自变送器的测量值与给定值相比较后产生的偏差进行比例、积分、微分(PID )运算,并输出统一标准信号,去控制执行机构的动作,以实现对温度、压力、流量、液位及其他工艺便利的自动控制[1]。
在工业过程控制中,PID 控制是历史最悠久,生命力最强的一种控制方式。
它是迄今为止最通用的控制方法。
它提供一种反馈控制,通过积分作用可以消除稳态误差,通过微分作用可以预测未来。
智能控制器能解决许多控制问题,尤其在动态过程是良性的和性能要求不太高的情况下。
智能控制不仅是分布式控制系统的重要组成部分,而且嵌入在许多有特殊要求的控制系统中。
在过程控制中,90%以上的控制回路采用PID 类型的控制器,因此,大多数反馈回路采用该方法或其较小的变形来控制。
2、调节器原理在图1.1所示的单回路控制系统中,由于扰动作用使被控变量偏离给定值,从而产生偏差s i x x e -=,式中e-偏差;i x -测量值;s x -给定值。
调节器接受偏差信号后,按一定的运算规律输出控制信号,作用于被控对象,以消除扰动对被控变量的影响,从而使被控变量回到给定值上来。
图1.1 单回路控制系统结构图调节器的运算规律就是指调节器的输出信号与输入偏差之间随时间的变化规律。
习惯上称e>0为正偏差;e<0为负偏差。
若e>0时,对应的输出信号变化量∆y>0,则成调节器为正作用调节器;若e<0时,对应的输出信号变化量∆y>0,则称调节器为反作用调节器。
3、调节器分类按使用能源的不同分类可分为:电动调节器、气动调节器和液动调节器;按控制规律的不同可分为:位式调节器、比例积分调节器、比例微分调节器和三作用调节器;按传递的运算信号形式可分为:模拟式和数字式两类[2]。
按其结构和组成的形式可分为以下几种类型。
(1)基地式调节器基地式调节器吧对被控量的测量、变送、调节、显示等作用部件合为一体,彼此以下可分离的机械结构和联接,并装在一个表壳内,有的甚至还包容了检测元件和执行器,能完成单回路控制系统的就地检测、记录及调节等全部功能。
(2)单元组合式调节器单元组合式调节器式单元组合仪表的调节单元。
按其能源的不同分为电动和气动两大类。
它们的输入信号和输出信号都是统一的标准信号,电动Ⅱ型调节器式0-10mA 直流电流信号,电动Ⅲ型调节器式4-20mA直流电流信号,气动调节器为20-100kPa 气压信号[3]。
(3)组装式电子控制装置组装式电子控制装置式在电动单元组合仪表的基础上发展起来的,是一种将仪表与生产过程控制系统有机地、紧密地结合在一起的综合性成套仪表。
(4)可编程调节器可编程调节器是一种智能化面板式过程控制仪表。
它以微处理机作为运算、判断和控制的核心。
它的控制规律或是运算功能是根据过程控制的需要,通过用户编程来实现的,但其外表和操作方式却与DDZ系列仪表相似,并且可以与之混合使用。
(5)集中分散型控制装置集中分散型控制装置是把整个控制系统分成若干级,最基层的是直接数字控制,上一级是优化控制,这样既能发挥计算机控制多功能的特点,满足现代化工生产集中操作、显示和报警的要求,又能避免危险过分集中,使整个系统安全可靠。
4、微处理器的选择从价格、字长、输入/输出的执行速度、编程的灵活性、寻址能力、中断功能、直接存储器访问(DMA)能力、配套的外围电路芯片是否丰富以及相应的开发系统是否具备等多方面进行综合考虑[4][5]。
以下列出几种微处理器,予以比较:(1)51单片机仿真63K程序空间,接近64K 的16位地址空间;仿真64Kxdata 空间,全部64K 的16位地址空间;真实仿真全部32 条IO脚;完全兼容keilC51 UV2 调试环境,可以通过UV2 环境进行单步,断点,全速等操作;使用C51语言或者ASM汇编语言进行调试;可选使用用户晶振,支持0-40MHZ 晶振频率;仿真双DPTR 指针;仿真去除ALE 信号输出;RS-232接口不计成本采用MAX202集成电路,串行通讯稳定可靠,绝非一般三极管的简易电路可比。
(2) AVR单片机在相同的系统时钟下AVR运行速度最快;芯片内部的Flsah、EEPROM、SRAM容量较大;所有型号的Flash、EEPROM都可以反复烧写、全部支持在线编程烧写(ISP);多种频率的内部RC振荡器、上电自动复位、看门狗、启动延时等功能,零外围电路也可以工作;每个IO口都可以以推换驱动的方式输出高、低电平,驱动能力强;内部资源丰富,一般都集成AD、DA模数器;PWM;SPI、USART、TWI、I2C通信口;丰富的中断源等。
(3) PIC单片机PIC最大的特点是不搞单纯的功能堆积,而是从实际出发,重视产品的性能与价格比,靠发展多种型号来满足不同层次的应用要求。
精简指令使其执行效率大为提高。
PIC系列8位CMOS单片机具有独特的RISC结构,数据总线和指令总线分离的哈佛总线(Harvard)结构,使指令具有单字长的特性,且允许指令码的位数可多于8位的数据位数,这与传统的采用CISC结构的8位单片机相比,可以达到2:1的代码压缩,速度提高4倍。
PIC有优越开发环境。
产品上市零等待(Zero time to market)。
彻底的保密性。
自带看门狗定时器,可以用来提高程序运行的可靠性。
睡眠和低功耗模式。
(4) MSP430单片机处理能力强;运算速度快;超低功耗;片内资源丰富;方便高效的开发环境。
本设计采用AVR单片机或MSP430单片机。
5、控制算法的选择基本的控制算法[6]有:程序控制和顺序控制、PID控制、直接数字控制、最优控制、模糊控制、神经网络控制。
其中PID控制最为成熟,控制结构简单,参数容易控制,且不必求出被控对象的数字模型就可进行调节[7]。
PID控制算法是计算机控制的一个广泛应用的基本算法,而PID控制的数字化是属于控制算法设计中的模拟化设计方法,或称间接设计方法[8]。
理想PID 算式:])()(1)([)(0⎰++=tdip dtt de T dt t e T t e K t u (1-1)转换成传递函数:)11()()()(s T sT K s E s U s D d i p ++==(1-2)可以画成如图1.2所示。
图1.2 PID 控制器方框图 其位置式算法:)]}1()([)(T T e(k){)(0i--++=∑=k e k e TT k e K k u d kk P (1-3)增量式算法:)]2()1(2)([)()]1()([)(-+--++--=∆k e k e k e K k e K k e k e K k u d i P (1-4) 本设计预采用积分分离 PID 控制算法。
二、智能调节器硬件电路设计智能调节器的硬件电路由主机电路、过程输入/输出通道、人机接口电路以及通信接口电路等部分组成[9],其结构原理图如图2.1所示。
模拟量输入状态量输入数据通信模拟量输出状态量输出图2.1 智能调节器的硬件电路原理图其中主机电路由CPU 、存储器(ROM 、EPROM 、RAM )、定时/计数器及I/O 接口等组成,是智能调节器的核心,用于实现仪表数据运算处理、各组成部分之间的管理。
过程输入/输出通道包括模拟量输入/输出通道和开关量输入/输出通道,前者用于接收/输出模拟量信号,后者用于接收/输出开光信号;一台智能调节器通常都可以接收/输出若干个模拟量信号和开关量信号。
人机接口部件一般由操作按钮和显示部件组成,用于实现调节器与使用人员之间的各种信息的交流。
通信接口电路主要用于智能调节器与其他控制设备之间的数据通信,大多采用串级传输方式。
硬件是整个设计的基础。
在本系统中选用以AT89C51单片机为控制核心,输入电压通过AD 转换器,输出数字信号送入AT89C51单片机进行PID 运算,运算完成后一路输出结果进入74ALS573锁存器。
通过人机界面的设计,在LED 上显示出来。
其中键盘的三个按键功能分别为“功能选择键” 、“ +” 、“ -” 。
一路通过DA 转换芯片将转换值返回输入端。
三、智能调节器的软件设计智能调节器具有运算控制功能强,通过软件实现所需功能,带有自诊断功能,带有数字通信功能,与模拟调节器特性相似,保持常规模拟调节器的操作方式等优点,实现了仪表和计算机的一体化,因而在工业生产过程自动控制系统中得到了广泛的应用。
首先软件设计需要能够进行PID运算,其次还要能够解决一些问题[10]。
(1) 控制流程图图3.1 控制流程图(2)人机对话程序人机对话是指计算机通过显示器或打印设备,向操作人员提供有用的信息,操作人员通过键盘向计算机输入信息,以控制程序的运行,或是设置、修改、调试系统有关参数。
人机对话功能,需要设计相应的程序或是调用所选的编程语言中的有关子程序实现。
(3)输入信号的预处理为抑制各种环境干扰及测量噪声,对输入至计算机的采样信号进行预处理有时是很需要的。
有很多的预处理数学模型,一般常见的有三种:①算术均值每一采样周期取N次输入,求N次的算术平均值作为本次采样值。
,i=1,2,…,N,则第k采样周期至均值设第k采样周期取N次输入)e(ki∑==Ni ik eNk e 1)(1)( (3-1)②加权均值每一采样周期取N 次输入,求N 次加权均值∑==Ni iik ec k e 1)()( (3-2)11=∑=Ni ic(3-3)其中,i c :加权系数,根据具体情况确定。
③一阶滤波算法 一阶滤波算法模型10),()1()1()(<<-+-=a k e a k ae k e f f (3-4)其中,)(k e :滤波器第k 周期采样输入;)(k e f :滤波器第k 周期输出;a :滤波系数。
(4)其他问题的处理对异常信号的处理、系统运行状态的显示与记录以及数制、代码转换程序等。
(5)程序实现语言有多种高级语言可以用于实时控制,例如C 语言等,高级语言之优点为编程较易,修改也比较方便。
本设计采用C 语言。
四、总结单片机体积小、重量轻、抗干扰能力强、环境要求不高、价格低廉、可靠性高、灵活性好、开发较为容易,极易实现系统移植,并且加快了软件的开发进程。
PID 算法能够实时控制,消除稳态误差、提高精度,特别是积分分离 PID控制算法,既保持了积分作用,又减小了超调量,使得控制性能有了较大的改善,因此PID算法是本设计的重中之重。
该数字调节器硬件结构简单、系统稳定、控制精度高且价格低廉;该系统还具备了自诊断和报警的功能,避免出现意外事故。