美军无人机成功自主空中加油 将改变远程打击模式.
美军无人机发展现状及趋势探析
美军无人机发展现状及趋势探析2011-06-28海神纵观美军近几场现代化条件下的局部战争,我们不难发现,无人机在战场的投入量越来越大,担负的任务也从战场侦察和监视扩展到海域巡逻、反潜战、对舰(地)攻击、电子干扰、通信截听、目标精确定位、中继通信等领域,甚至扩展到战区空中导弹防御、心理战和网络中心战领域。
无人机已经成为美军作战不可或缺的重要武器平台,在信息化条件的现代战争中发挥着举足轻重的作用,可以预见其必将成为未来信息化战争——“无人化战争”的生力军。
一、美军无人机发展的动因(一)军事需求的牵引是无人机发展的源动力未来战争形态将是信息化战争,信息力可能会成为战斗力诸要素中的首要要素。
美国国防部始终以提高美军全球感知能力为其终极目标。
无人机具有受气候条件限制少、昼夜可用、能突入危险地区上空长时间的实施监视与侦察以获取情报信息(包括通信情报和电子情报的信息)并能实时传输目标图像的独特优势,成为能够满足这一需求的有效手段。
“零伤亡”目标一直是美军追求的最高境界,也是美军发展无人机的外部原因。
现代空袭反空袭斗争异常激烈,即使美军最先进的飞机也可能遭受袭击后坠毁,人员伤亡依然不可避免。
无人机恰好可以适应美军战场上“零伤亡”的要求,不用飞行员冒着生命危险作战,就是被击落也不会有人员伤亡,所以美军把无人机列为未来实现“零伤亡”目标的首选武器。
“网络中心战”和“非接触”作战理论是美军大力发展无人机武器装备的重要依据和理论支撑。
美军军事专家分析认为,“网络中心战”和“非接触作战”将成为未来战场的主要作战方式。
美军在不断的战争实践中摸索发现,无人机是实施网络中心战和非接触作战的一种能游刃有余于战场多个空间的重要作战平台和打击手段。
因为无人机本身所具有的探测与监视、指挥与通信、干扰与摧毁能力正好符合了美军网络中心战所需的要求,使得其成为美军实施作战的主要攻击手段之一。
(二)高新技术的进步是无人机发展的支撑点微电子、动力和隐身等高新技术的进步是军用无人机发展的重要推动力。
空中战场空中加油机的远程作战支援

空中战场空中加油机的远程作战支援在现代空中战场中,空中加油机扮演着重要的角色,为战斗机和其他作战飞机提供远程作战支援。
空中加油技术的发展使得战斗机在空中续航能力大幅提升,有效地延长了作战时间和距离,为军事行动提供了重要保障。
一、空中加油机的定义与作用空中加油机是一种专门用于在飞行中为其他飞行器补充燃油的飞机。
其作用在于将燃油传输至需要加油的飞行器,使其能够延长飞行时间、增加作战半径,从而实现远程作战支援。
二、空中加油技术的发展历程空中加油技术的发展经历了多个阶段。
最早的空中加油方式是使用简单的手动操作进行,随后发展为自动窗口式加油,再到现代的龙门吊挂式加油系统。
这种系统通过伸缩式油管将燃油从加油机传输至接收机,实现了高效、快速的空中加油。
三、空中加油机的分类与特点根据加油方式和机身特点,空中加油机可以分为刚性加油机和软管加油机。
刚性加油机通过机身上的刚性加油梁进行加油,加油速度较快,但只能在某些特定类型的飞机上加油。
软管加油机则通过伸缩性的软管进行加油,灵活性更高,可以为不同型号的飞机提供加油服务。
四、空中加油的重要性与优势空中加油技术的应用使得战斗机在战场上具备了更大的续航能力,有效地提升了作战效能。
通过空中加油,战斗机可以在长时间飞行中接受燃油补给,延长战斗持续时间,增加作战半径,实现更远程的作战支援。
这对于远洋作战、远程打击等战略行动具有重要意义。
五、空中加油机的应用案例空中加油技术在许多军事行动中发挥了重要作用。
例如,美国在海湾战争中就广泛使用了空中加油机,以保持远程轰炸机的作战能力。
此外,空中加油技术还被用于国际联合行动中,通过空中加油,多国飞机能够在远距离作战区域共同作战,增强了联合打击的威力。
六、空中加油技术面临的挑战与前景展望虽然空中加油技术已经取得了巨大的发展,但仍面临一些挑战。
首先是技术上的挑战,如加油机与接收机之间的连接与传输技术需要进一步改进。
其次是安全性问题,空中加油作业需要高度的协同配合和保障措施,以确保作业过程的安全性和有效性。
美军无人空战装备智能化发展动态及启示
2022年8月第50卷第4期Aug.2022Vol.50No.4现代防御技术MODERN DEFENCE TECHNOLOGY美军无人空战装备智能化发展动态及启示*董康生1,胡伟波1,沈雁鸣1,唐上钦2(1.中国空气动力研究与发展中心计算空气动力研究所,四川绵阳621000;2.空军工程大学航空工程学院,陕西西安710038)摘要:美军无人机在军事行动中发挥了巨大作用,且数量规模和智能化水平在不断攀升。
为抢占无人智能化作战新的制高点,美军开展了一系列新的研究试验。
从美军现役无人机装备出发,分析了其主要作战运用特点以及优缺点。
针对美军装备无人智能化发展新动态,重点分析了自主空中加油、“忠诚僚机”、弹群协同、算法战、先进作战管理等软硬件方面取得的重大进展,并总结了其无人智能化发展呈现出的新规律、新特点。
从空战理论、能力技术和装备体系3个方面,提出了应对无人智能化装备发展的思考建议。
关键词:无人机;导弹;智能化;集群化;协同;算法doi:10.3969/j.issn.1009-086x.2022.04.004中图分类号:V279;E844;TJ0文献标志码:A文章编号:1009-086X(2022)-04-0028-10Development and Implications of Intelligent Unmanned Combat AerialEquipment by the US ArmyDONG Kang-sheng1,HU Wei-bo1,SHEN Yan-ming1,TANG Shang-qin2(1.China Aerodynamics Research and Development Center,Computational Aerodynamics Institute,Sichuan Mianyang 621000,China;2.Air Force Engineering University,College of Aeronautic Engineering,Shaanxi Xi′an710038,China)Abstract:itary unmanned aerial vehicles(UAVs)play an important role in military op‐erations.There is an increasing trend for the total number of the UAVs and their intelligent level.To seize the high ground in the domain of the unmanned intelligent warfare,the US army are carrying out a series of new research projects.This paper analyzes the operational characteristics as well as the ad‐vantages and disadvantages of the itary′s in-service UAV equipment.According to the latest development of the intelligent technology in software and hardware,the projects of Carrier-Based Aerial-Refueling System,Loyal Wingman,Golden Horde,Project Maven,Advanced Battle Manage‐ment System are analyzed in detail.The new characteristics and pattern of these intelligent military equipment are presented.The implications and suggestions for tackling the development of unmanned intelligent equipment are proposed in terms of the air combat theory,capabilities and techniques,as well as the equipment system.Keywords:unmanned aerial vehicle(UAV);missile;intelligent;cluster;cooperation;algorithm☞军事智能☜*收稿日期:2021-11-23;修回日期:2021-12-20第一作者简介:董康生(1988-),男,江西乐平人。
无人机改变战争模式
龙源期刊网
无人机改变战争模式
作者:
来源:《文萃报·周二版》2019年第39期
外媒称,9月14日针对沙特石油设施发动的“无人机闪电战”是一个明确的战略信号,表明有人喷气式战机制空的时代已经结束。
在现代战争史上,“得制空权者得天下”一直是颠扑不破的真理。
那些拥有最先进技术和最庞大预算的发达国家投入海量资金建设现代化空军,确信这样的空军能够在几乎任何冲突中继续令他们的军队占据战场主动权。
成本低廉的微型无人机改变了这种格局,尤其是在中东战场的上空。
仅在过去3个月里,无人机就对伊拉克、叙利亚、黎巴嫩,以及现在的沙特产生了巨大影响。
在沙特,一半的石油产量——相当于全球7%的石油供应量——被9月14日的一次“无人机闪电战”彻底端掉。
这次袭击没有触发空袭警报,似乎躲开了该地区最先进的预警雷达系统。
无人机现在已经成为中东地区部队的必备装备。
一些非国家组织也一直极力想得到它们,因为这些飞机难以探测、可隐藏身份,即使损失也不会令人心痛。
以色列军方装备了最新式的喷气式战机和精确武器,但它在打击叙利亚境内目标时还是依靠其无人机群。
无人机可躲避雷达,从而让被打击目标猜不到究竟是谁实施了轰炸。
这个能力对以色列领导人来说是有利的,因为他们试图防止这场与伊朗之间的“影子战争”演变为公开冲突。
伊朗也懂得对手的优势所在,扩大了其国产无人机群,既包括现有的成熟机型,也包括尖端的攻击型无人机。
对沙特的攻击是一个明确的战略信号,表明有人喷气式战机制空的時代将结束。
(据中新社9.18讯)。
无人机空中加油技术突破会让美更爱使用武力
无人机空中加油技术突破会让美更爱使用武力图为美国两架无人机实现自主加油的画面美国防部先进研究项目局近日完成了两架改进型RQ-4“全球鹰”无人机的近距编队飞行测试工作,对该型无人机的空中自主互助加油技术进行了成功验证,使其续航时间从之前的41个小时延长至160个小时以上。
美国率先实现无人机的空中加油,不仅在技术上是一项里程碑式的突破,在战略上也极具意义。
从上世纪60年代投入越南战场开始,无人机已从最初的“遥控目标诱饵”逐步成长为“空中多面手”,开始执行侦察、巡逻、电磁干扰、精确打击和战损评估等多样化任务。
但由于续航能力有限,无人机始终无法作为主力遂行远程战略侦察与打击任务。
在空中加油技术取得突破之后,无人机完全可以做到“全球到达、全球作战”,使美军变得“眼睛更亮、胳膊更长”,进而大幅增强美军的远程空中打击能力。
这对于具有全球利益的美国来说,无疑具有重要的战略意义。
从战争形态上来说,信息化战争已经成为发展方向,信息成为战斗力构成的第一要素,因此美军始终以提高全球感知能力作为其军事转型的重要目标。
实现空中加油之后的无人机,作战半径将得到极大拓展,将能够更充分地发挥受气候条件限制少、昼夜可用、能突入危险空域实施长时间情报信息侦察的独特优势,使美军在未来战争中占据更多的信息优势。
从作战层面上来说,无人机在监视、指挥与通信、干扰与摧毁等多方面的能力,使其成为美军实施网络中心战和非接触作战的重要作战平台和打击手段。
无人机空中加油技术的突破,将使美军在常规武器方面的优势得到延续和拓展,成为其打赢未来战争的一把“利刃”。
由于无人机性价比高,并且不受飞行员疲劳耐受时间的影响,美空中力量的发展重心正进一步向无人机倾斜。
美军在无人机方面的经费投入已从2000年的2.84亿美元猛增至2010年的37.66亿美元,更多的飞行员在接受操控无人机而不是驾驶飞机的训练。
美军公布的《2009-2047年无人机飞行路线图》,已经开始考虑在多个作战领域以无人机取代有人机。
X47B无人机资料简介
X-47B无人机简介众所周知,美国提出了“重返亚太”的战略方针,并且不断在落实,在这一进程中,美国海军起着至关重要的作用,而中、俄在中程反舰弹道导弹上的突破迫使美国的航母不得不撤退到距离海岸足够远的地方运作。
X47B的研制目的之一正是为了解决这一威胁,X-47B的飞行性能较高,作战半径长,可以在航母上自动起降,并有自主空中加油能力,再加上卓越的隐身性能,同美军各类现役战机相比,X-47B滞空时间更长,其800海里的作战半径,相当于F-35战机航程的两倍。
既可以使航母战斗群处于更安全的位置,也可以更深入内陆执行打击任务。
可以在美国重返太平洋的过程中增加美国海军的行动能力,这项发展在战略上具有重要意义。
下面我就围绕这架美军目前最先进的无人机,从三个方面来和大家交流。
首先,简要介绍X-47B的基本性能。
这是由美国国防技术公司诺斯罗普·格鲁门公司开发一架试验型无人战斗航空器。
是人类历史上第一架无需人工干预、完全由电脑操纵的“无尾翼、喷气式无人驾驶飞机”,也是第一架能够从航空母舰上起飞并自行回落的隐形无人轰炸机。
在成本方面,一架X-47B无人机约为1500万美元,而“捕食者”无人机的成本仅为400万美元,相当于“捕食者”的四倍。
X-47B外形与B-2型隐形轰炸机极其相似,被称为缩小版的B-2。
尺寸直逼美海军现役的F/A-18E/F超级大黄蜂战斗机。
X-47B的载弹量是4500磅,折合成公制大约是2吨,内油要超过11吨,比F/A-18E要大5吨左右,比F-35也要大2吨多。
X-47B外翼设计还包括机翼折叠能力,这样可以使飞机在母舰上占有更小的空间。
根据初步估算,一艘航母可以装备150多架舰载型无人战机,从而构成历史上装备飞机数量最多的航母飞机战队,航母作战能力比以前提高很多。
2011年2月4日在美国加利福尼亚州爱德华兹空军基地首飞成功。
飞行测试共持续了29分钟左右,飞机最高爬升了1500米左右的高度。
美国陆军无人机系统2010-2035路线图
前言2001年10月,54架“猎人”和“影子”攻击型无人机投入作战运用。
由此,美国陆军的整场军事行动拉开帷幕。
今天,美国陆军装备的无人机已经超过了4000架,它们型号各异,功能不同,而且还在进一步列装之中。
近9年连绵不断的战火中,在支援部队作战的行动中,无人机系统作战运用的方式不断适应形势,发生着显著变化。
这种适应,不仅表现在当前无人机部队作战平台的剧增,而且也表现在无人机系统能力的不断扩展。
值此联合能力集成开发系统(JCIDS)文件对需求已经予以认可,官方计划业已立项之际,为未来的无人机系统需求做出通盘战略考虑的时刻,或是制定规划的时机已经来临。
《美国陆军无人机系统路线图(2010-2035)》为美国陆军研发、装备和在全谱作战中使用无人机系统提供了广阔视角,该路线图的主要理念将为持续学习和分析建立共同的基础。
我们将不断评估这些观点,质疑这些假设,对无人机系统能力的各个领域都予以开发。
该路线图将明确战斗功能概念,致力于完成基于能力的评估,并有助于新技术知情决策的发展(这些新技术将通过综合实验和测试完成评估)。
最终,该路线图将回答这样的问题:“未来美国陆军需要具何种功能的无人机?”正如《美国陆军核心概念》所述,在这个持久冲突的年代里,为了在不确定的、错综复杂的环境中有效作战,领导者必须明察战场纵深态势,部队行动要不断适应形势变化以先发制人并保持主动,在广阔地域内持续作战时需具备远距离快速作战能力。
研发无人机系统,将其纳入到部队行动之中,将扩展陆军的态势感知能力,同时将提升陆军发现、定位和摧毁敌军的能力。
我们也希望,在危险的严酷环境下,未来的无人机系统能够有助于快速反应和持续保障。
该路线图为无人机系统发展及其与陆军的一体化进程提供了革命性途径,路线图划分为三个时间段:近期发展阶段(2010-2015年),中期发展阶段(2016-2025年)和远期发展阶段(2026-2035年)。
近期要在快速应用当前技术,满足陆战场需求的同时,关注当前无人机的能力差距。
空中加油远程奔袭作战精典战例回眸
空中加油远程奔袭作战精典战例回眸作者:孙立华来源:《军工文化》2015年第06期空中加油机被誉为航空兵的“力量倍增器”,空中加油是衡量现代远程空战能力的重要标志。
它于上世纪20年代诞生于美国,并于越战期间首次在实战中得到大规模运用。
由于对加、受油机性能和飞行员的综合要求都非常高,空中加油技术属于世界公认的高难技术,目前仅有美、英、俄、法、中等几个国家掌握。
高技术条件下局部战争的实践证明,号称“空中油船”的空中加油机已成为空中作战的重要支柱,在战争中得到广泛的应用,并显示出了它巨大的优越性。
人工操纵空中加油成功引发了空中加油技术的开发,越南战争拉开了空中加油战的序幕1921年,富于冒险而又充满想象力的美国人威利·梅伊把一个装有5加仑航空汽油的罐子绑在背上,从一架林肯型飞机的机翼上,爬到另一架飞行的JN-24型珍妮飞机的机翼,并运动到其发动机旁,将油罐中的航空汽油倒进发动机燃料箱,从而成功地完成了第一次空中加油。
从此,开始了人类对空中加油技术的开发。
1923年,美国陆军的一架单引擎DH-4B飞机,在飞行中由另一架同型飞机,用人工操作,以软管自流的方式进行了两次加油,从而开始了真正意义上的空中加油。
美国空军自从1957年装备了KC-135以后,为战略航空兵的轰炸机部队进行空中加油的手段得到了重大的改进。
它可以在接近于或相等于接受加油的飞机的高度和速度的条件下进行加油。
在1959年又成功地完成了为喷气式战斗机加油试验,并受领任务为参加某些演习或往返海外基地的战术航空兵飞机实施加油。
越南战争,是战争实践中首次大规模实施空中加油的开端,从战争爆发到停战的9年零2个月时间内,美军的172架KC-135加油机共飞行19万多架次,进行空中加油81万多次,共加燃油410万吨。
KC-135作出的贡献中不可忽视的一项内容,就是挽救了战斗机和机组人员的生命。
没有这种加油机,许多油料不足的战斗机将永远回不了基地。
美国海军舰载无人加油机发展评述

美国海军舰载无人加油机发展评述作者:吴思亮陈宇来源:《航空世界》2018年第05期航空母舰的作战能力主要来自于舰载战斗机。
由于受到航母飞行甲板的限制,航母无法搭载大型空中加油机,因此舰载战斗机以前主要使用战斗机/攻击机改装的空中加油机来增加航程。
美国海军的改装空中加油机发展由来已久,道格拉斯公司的A-3“空中勇士”、格鲁曼公司的A-6“入侵者”、A-7“海盗”和最新型的F/A-18E/F“超级大黄蜂”,都曾经作为加油平台来弥补空中加油力量的不足。
其实,美国海军曾经进行过使用大型加油机的尝试。
早年间,美国海军利用KC-130在航母甲板上做过起降试验,但是由于KC-130的尺寸太大,即使只在飞行甲板上停留,也有较大的限制,比如影响甲板的运行,特别是减少了甲板停机的数量,而航母舰载机在机库中是不能挂弹和装油的,因此对于作战效能而言是不升反降,美军最终也放弃了这种做法。
后来,美军开始利用攻击机来改装成加油机。
比如,以A-3“空中勇士”为基础研发的KA-3B,还有既能执行空中加油任务又能完成电子对抗和打击任务的EVA-3B加油与电子战机(TACOS)。
早在二战时期,美国海军就开始探索喷气式飞机的概念,战后喷气式飞机成为航母的主要打击力量,1948年1月,美国海军作战部长发布了发展远程舰载攻击机的需求,目标是具备4500千克的弹药运载能力,最终,美国海军将合同授予了道格拉斯飞机公司,A-3D“空中勇士”开始列装美国海军。
1962年,美国海军将A-3D改装成KA-3加油机,该机最大载油12681升,具备遂行空中加油任务的基础。
一架KA-3能够携带13154千克燃油飞行740千米,能够为2.2架-4J加满油,开始协同舰载战斗机执行空中加油任务。
KA-3每次任务出动2架,主要在战斗机执行完打击任务返航过程中,或者舰载机首次降落失败,寻找机会第二次降落期间实施加油。
KA-3空中加油机在1959~1969年执行了大量任务,包括在越南战场上与KC-135、F-104、F-8和F-4等机型进行的协同作战。
军用无人机技术的发展现状及未来趋势
0 引言由于具有零伤亡、使用限制少、隐蔽性好、效费比高等特点,军用无人机在现代战争中的地位和作用日渐突显。
在近期发生的历次局部战争中,军用无人机的使用数量、种类和频次等呈快速增长趋势[1]。
因此,大力发展无人机已经成为当今世界军事强国军方的共识。
近年来,各国纷纷出台各自的无人机发展规划,并加大投入力度,军用无人机的发展呈现出前所未有的热潮。
可以预见,无人机今后将会以其特有的优势在未来战争中发挥举足轻重的作用。
1 应用特点从总体上看,当前世界军用无人机发展呈现出这样的态势:美国占据着无人机发展的制高点,并引领世界无人机的发展方向;欧洲各国则不甘人后,奋起直追;以色列起步较早,并在战术无人机、长航时无人机方面具有特色和优势;俄罗斯曾一度落后于先进国家,近年其地位已有所回升;第三世界国家则军用无人机技术的发展现状及未来趋势摘 要:作为一种多用途、低费效比的航空武器装备,军用无人机日益受到世界各国军方的重视。
本文分析了现役和即将服役军用无人机的技术水平及应用特点,并对军用无人机的发展趋势进行了展望。
Abstract :As a multirole and low cost-effective weapon, military UAS was increasingly taken attention around the world. This paper analyzes the technology level and application characteristics for servicing and upcoming service military UAS, and prospect the development trends of military UAS.关键词:军用无人机;现状;发展趋势Keywords :military UAS ;development ;trendsDevelopment and Trend of Military UAV Technology陈黎/中国航空工业发展研究中心普遍重视、引进、开发中小型无人机。
无人机(UAV)空中燃料补给即将实现
无人机(UAV)空中燃料补给即将实现
佚名
【期刊名称】《《军民两用技术与产品》》
【年(卷),期】2005(000)011
【摘要】美国空军实验室(AFRL)成功地完成了对采用精确全球定位系统(GPS)和光电(EO)技术的无人机(UAV)自动空中加油(AAR)技术的可行性飞行演示试验。
具有空中加油能力的无人机不但能够长时间盘旋在固定的空中站点.而且能够从几千英里以外的基地起飞参加联合飞行任务、在飞行试验中,通用动力公司生产的Learjet 25作为无人机的替代品.与KC—135型空中加油机模拟空中加油。
KC-135型空中加油机来自纽约空中国民警卫队第107空中加油中队。
【总页数】1页(P33)
【正文语种】中文
【中图分类】V279
【相关文献】
1.无人机系列(UAVs) [J],
2.无人机空中激光扫描测绘系统的设计与实现 [J], 罗东山;何军;崔立水
3.新的发电技术将使电动汽车在数分钟内实现燃料的快速补给 [J], 凯文.布里斯
4.高架索海上补给装置—在航行补给系统中应用独特的HST高架索以传送燃料、
装备和武器 [J], S.T.富吉;渠慎诺
5.实现无人机空中加油的AAR项目 [J], 马凌;魏国福
因版权原因,仅展示原文概要,查看原文内容请购买。
美国国家军事战略

报告特别指出,美国将会努力确保处于战略“十字路口”的主要新兴强国能在国际体系中扮演建设性角色,成为国际体系中的利益相关者。
加速研发新一代远程打击武器
报告指出,为确保美军拥有绝对的军事优势,美空军将具有全天候快速定位和打击全球数千个固定和移动目标的能力。包括用于侦察和攻击的无人机发展计划。其中加速发展远程打击武器是最具体也是最关键的措施之一。
在应对大规模杀伤性武器方面,国防部指定美国战略司令部统一协调对抗大规模杀伤性武器的作战行动,国防部还将建立一个便于部署的联合特遣部队司令部,以便为执行消除大规模杀伤性武器任务的部队提供即时的指挥与控制。报告同时宣布美国军方将在未来5年内投入15亿美元,发展对付生化武器袭击的技术。
为应对处于战略“十字路口”的新兴国家,强化威慑能力,报告提出将发展更多的常规和非动能威慑手段,同时维持一支强大的核威慑力量;开始开发新一代远程打击武器,将新一代远程打击武器具备初始作战能力的时间提前几乎20年,并增加对无人机的采购,以提高持久监视能力。
基于目前取得的进展,为建立联合海上作战部队,美国防部将组建包括11个航母战斗群的大型舰队,以平衡转型和重新规划舰队能力的需要,改进经济可承受性和保持造船工业的稳定性;采购首批8艘海上预置部队舰只,以改进在限制进入地区的行动能力;提供海军内河作战能力,在内陆地区进行河流巡逻,禁航和战术运动;通过特别采办计划,加强与盟国的合作以改进全球海上安全;在2012年之前,实现每年生产2艘潜艇,每艘潜艇成本控制为20亿美元计划.
报告称,为了加强美军实力,应付处于战略“十字路口”国家的潜在挑战,美国必须发展持久的远程军事行动能力。为此,美军将全力改进目前的B-52、B-1和B-2型远程轰炸机的性能,推动武器的现代化;把无人驾驶的空中打击武器在未来远程打击武器中的比例提高到45%以上;修订“联合无人空战系统”计划,研制具有空中加油能力的无人远程舰载机,增加海上到达和保持军事实力的能力;加速采购“全球鹰”和“捕食者”无人机,使其数量增加一倍;修订F-22A计划,将其生产能力延续到2010财年,确保国防部在拥有第五代隐身飞机之前不会出现断层;另外,还将大幅增加部署在太平洋的航母和潜艇数量等。最为引人注目的计划是,美国将在2018年之前开发出新的“陆基的、具有穿透力的”远程攻击武器,并投入战场。这些武器在必要的时候可以发动攻击,还可以在敌人腹地长期执行战斗任务。
“空中怪客”——美军无人机全扫描
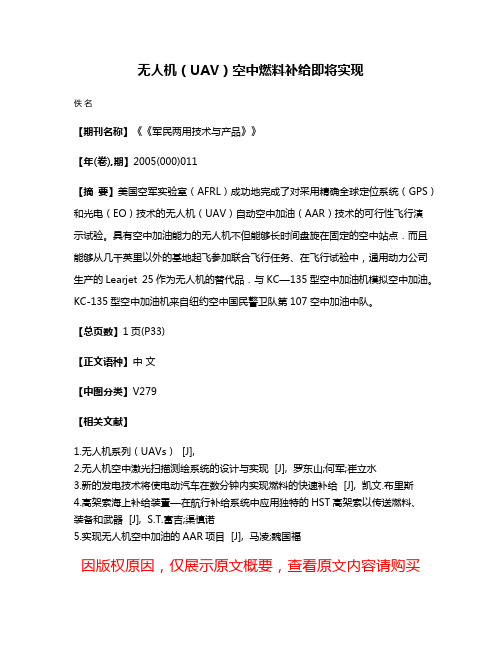
武器装备34/ 军事文摘/ 2013.12郑 昌据美国《星条旗报》报道,2013年7月10日早晨,美军一架X-47B隐形无人机从马里兰州帕图森河海军航空站起飞,在两架F/A-18战斗机的护送下,依靠精确的GPS系统和先进的航电装置飞到“布什”号航母上空,随后成功降落到航母的飞行甲板上。
在当日的测试中,X-47B完成两次着舰,第一次着舰时,它如同有人驾驶飞机一样,用尾钩钩住飞行甲板第三根拦阻索,准确降落在航母上。
第2次着舰时,指挥人员改变策略,命令它改为钩住第二根拦阻索。
报道称,能根据指令钩住两根不同的拦阻索,表明X-47B的设计非常完美,在航域范围和性能方面表现出众,若能有效控制成本,将对F-35等有人舰载战斗机形成竞争优势。
这又一次将全世界的目光吸引到美军无人驾驶飞机上。
纵观近几年的国际军事舞台,美军无人机的身影可谓异常频繁,从阿富汗战争、伊拉克战争到北约空袭利比亚、亚丁湾反海盗,美军的无人机无处不在,甚至在甚嚣尘上的美国和以色列可能摧毁伊朗核反应堆的军事预案中,美军无人机同样是不可或缺的“狠茬”,如今无人机又将更深一步迈向海洋。
很显然,关注今天乃至明天的战争,就不能忽视这些“空中怪客”。
RQ-4“全球鹰”相信了解冷战的读者都知道一款神出鬼没的飞机——U-2,它总是出没于敌国戒备森严的领空,靠着高空高速两大优势偷窥军事机密。
然而“老兵不死,也将逐渐凋零”,年逾古稀的U-2也到了退休的岁数,而取代它的正是无人驾驶的RQ-4“全球鹰”无人侦察机。
“全球鹰”无人侦察机是在1998年完成首飞的较小的RQ-4A验证机基础上发展而来的高空长航时无人机系统。
这种无人机的飞行高度在55000~60000英尺之间,续航能力28小时,有效载荷3000磅,可作为多传感器情报、监视和侦察平台。
目前机上装有光电红外线和合成孔径雷达。
Block-30新型机还将装载信号情报搜集装置。
美国空军实验室还将为其研制称之为“光谱红外线成像技术试验床”的高光谱成像传感器。
美国海军试验航母无人作战飞机空中自主加油技术

美国海军试验航母无人作战飞机空中自主加油技术
左艳军
【期刊名称】《舰船科学技术》
【年(卷),期】2012(34)4
【摘要】据空间与防务新闻网报道,诺斯罗普·格鲁曼公司与美国海军已经成功地完成了系列演示技术飞行试验,用于拓展和延长未来航母无人机飞行距离和飞行时间。
飞行试验验证了2014年将使得X-47B无人机能够实现自主空中加油(AAR)的
硬件和软件功能。
【总页数】1页(P97-97)
【关键词】飞行试验;加油技术;美国海军;无人作战飞机;航母;诺斯罗普;飞行时间;软件功能
【作者】左艳军
【作者单位】
【正文语种】中文
【中图分类】V217
【相关文献】
1.美国无人机自主空中加油技术取得突破 [J], 温杰
2.无人作战飞机空中加油航路问题研究 [J], 程路尧;朱建冲;蔡纪伟
3.意大利“天空-X”无人机完成世界首例全自主空中加油模拟试验 [J],
4.自主空中加油时变质量无人作战飞机非线性控制 [J], 郭军;董新民;王龙
5.无人机软管式自主空中加油视觉导航技术 [J], 周清; 许悦雷; 加尔肯别克
因版权原因,仅展示原文概要,查看原文内容请购买。
2011十大新闻
2011十大新闻利比亚禁飞区2011年3月17日,联合国安理会以10票赞成,5票弃权通过决议,决定在利比亚设立禁飞区。
入选理由:这是近年来联合国首次在一个主权国家的领空设立禁飞区,最初的目的仅仅是禁止卡扎菲政府使用空军对国内抗议民众实施打击,不过维持禁飞区的北约飞机逐渐将目标由卡扎菲的空军转向地面部队。
在北约飞机的协助下,利比亚反政府军最终击毙卡扎菲,完成了武装革命。
X-47B首飞2011年2月4日,诺斯罗普?格鲁曼公司设计的X-47B 舰载无人攻击机在美国加利福尼亚爱德华兹空军基地完成了29分钟的首飞。
入选理由:29分钟的飞行开启了舰载战斗机的无人隐身时代,尽管舰载机着舰是一项危险而艰巨的任务,即便是有人驾驶战斗机也有机毁人亡的案例发生,但美国海军还是要试水无人舰载战斗机,因为他们认为这是海军的未来。
击毙本,拉登2011年5月1日,美国海豹突击队6分队乘坐直升机潜入巴基斯坦首都伊斯兰堡附近的阿伯塔巴德,一举击毙恐怖大亨本?拉登。
入选理由:本,拉登所作的事过去只有山本五十六做过――9?11事件被美国人视为继“珍珠港”事件后美国本土遭遇的最大规模袭击。
本?拉登及其领导的塔利班武装几乎取代苏联成为21世纪最今美国人头疼的对手。
拉登之死可以视作美国10年反恐的标志性胜利,但恐怖主义本身却很难以此画上句号。
航天飞机退役2011年7月21日,“阿特兰蒂斯”号航天飞机完成“谢幕之旅”,在美国佛罗里达肯尼迪航天中心安全降落,自此为期30年的美国航天飞机时代宣告终结。
入选理由:航天飞机谢幕,表面上看似乎是美国航天史上的一次挫折,但从航天产业的角度看,这几乎就是一次从“输血”式发展到“造血”式发展的航天产业大跨越,将会对未来人类的宇宙探索产生不可估量的影响。
这让更多优秀的航天人才和技术,加速流向美国已经基本成熟的航天产业。
而随着近年来私人投资的载人飞船相继问世,美国在航天产业民间化、商业化的竞争中,可能将又一次居于垄断和领先的位置。
美军无人机空中加油技术渐趋完善
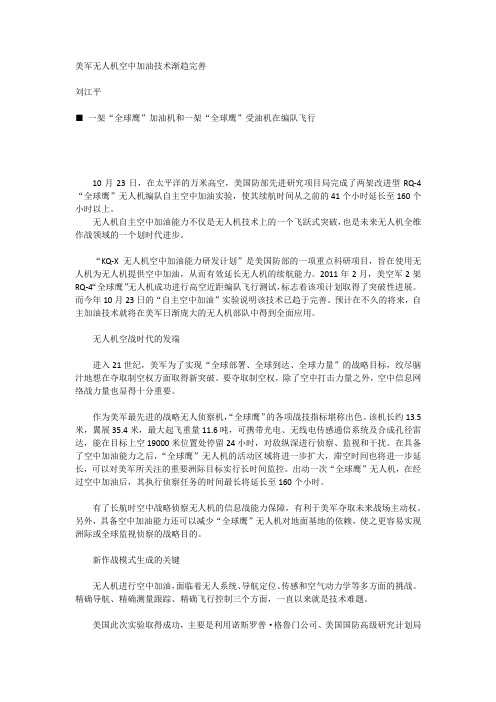
美军无人机空中加油技术渐趋完善刘江平■一架“全球鹰”加油机和一架“全球鹰”受油机在编队飞行10月23日,在太平洋的万米高空,美国防部先进研究项目局完成了两架改进型RQ-4“全球鹰”无人机编队自主空中加油实验,使其续航时间从之前的41个小时延长至160个小时以上。
无人机自主空中加油能力不仅是无人机技术上的一个飞跃式突破,也是未来无人机全维作战领域的一个划时代进步。
“KQ-X无人机空中加油能力研发计划”是美国防部的一项重点科研项目,旨在使用无人机为无人机提供空中加油,从而有效延长无人机的续航能力。
2011年2月,美空军2架RQ-4“全球鹰”无人机成功进行高空近距编队飞行测试,标志着该项计划取得了突破性进展。
而今年10月23日的“自主空中加油”实验说明该技术已趋于完善。
预计在不久的将来,自主加油技术就将在美军日渐庞大的无人机部队中得到全面应用。
无人机空战时代的发端进入21世纪,美军为了实现“全球部署、全球到达、全球力量”的战略目标,绞尽脑汁地想在夺取制空权方面取得新突破。
要夺取制空权,除了空中打击力量之外,空中信息网络战力量也显得十分重要。
作为美军最先进的战略无人侦察机,“全球鹰”的各项战技指标堪称出色。
该机长约13.5米,翼展35.4米,最大起飞重量11.6吨,可携带光电、无线电传感通信系统及合成孔径雷达,能在目标上空19000米位置处停留24小时,对敌纵深进行侦察、监视和干扰。
在具备了空中加油能力之后,“全球鹰”无人机的活动区域将进一步扩大,滞空时间也将进一步延长,可以对美军所关注的重要洲际目标实行长时间监控。
出动一次“全球鹰”无人机,在经过空中加油后,其执行侦察任务的时间最长将延长至160个小时。
有了长航时空中战略侦察无人机的信息战能力保障,有利于美军夺取未来战场主动权。
另外,具备空中加油能力还可以减少“全球鹰”无人机对地面基地的依赖,使之更容易实现洲际或全球监视侦察的战略目的。
新作战模式生成的关键无人机进行空中加油,面临着无人系统、导航定位、传感和空气动力学等多方面的挑战。
美军空中力量倍增器——KC-46A加油机

装 备美军空中力量倍增器——KC-46A加油机戚苏源美空军一直追求“全球机动、全球作战”的能力,在最近几次的战争行动中,美空军空中加油机为其夺取空中霸权发挥了重要作用,在科索沃战争中,北约出动的240架空中加油机,共实施了1.4万次空中加油,美国的B-2由其本土起飞实施30多个小时的远程奔袭主要靠空中加油来实现,在伊拉克战争中,美军空中加油共计4.17亿加仑,这些油量足够一架波音737-300飞机空运11.9年。
目前,美空军装备约700架加油机,可保证其600余架战略轰炸机和1000多架战斗机同时出海作战。
美空军拥有世界上最大规模的空中加油机队,包括了KC-135、KC-10等多个型号,长期以来,美军一直试图用新机型取代老化的机型,更好地在全球范围内实施攻击、监视和侦察任务,这也是KC-46A加油机问世的原因。
然而近段时期,波音公司的风评并不太好。
在民用飞机领域,该公司的产品波音737 MAX8客机于半年的时间之内就发生了两起机毁人亡的事故,变成“致命客机”,另一款“明星客机”波音787被爆使用老旧零件,存在安全隐患。
而在军用飞机领域,波音公司的KC-46A空中加油机也曾让美军比较头疼。
发展曲折2006年9月25日,美国空军制定了采购179架空中加油机的计划。
当时波音公司推出了KC-767客机衍生型加油机,而欧洲航空防务航天公司(现空客集团)与诺·格公司联手推出了空客A330客机衍生型加油机。
2008年2月29日,后者的投标方案中标。
波音公司立刻提交了一份正式抗议,宣称采购流程存在营私舞弊的现象,美国国防部在6个月后取消了该招标项目。
2009年,美空军发布了新修订的KC-X加油机招标方案,参加竞标的还是老对手,但诺·格公司退出,仅留下空客集团与波音公司较量。
最后,美国国防部宣布,波音公司赢得了这份价值340亿美元的合同,并命名为KC-46A加油机。
2013年9月,KC-46A加油机项目通过关键设计评审,意味着设计已经成熟,准备进入制造阶段。
美军提升远程空中打击力量
美军提升远程空中打击力量
余辉;石怀林
【期刊名称】《当代军事文摘》
【年(卷),期】2005(000)009
【摘要】近日,布什总统提名的美空军参谋总长莫斯里表示,上任后的首要任务是要部署针对中国内陆军事设施的远程攻击能力,确保美军能在24小时内赶至台湾增援、击退攻台的解放军特种部队。
近几次战争让美军尝到了远程空中打击的甜头。
为了应对更复杂的战争,美军持续提升远程奔袭、纵深打击能力,极大地拓宽了作战空间、时间和力量。
【总页数】1页(P)
【作者】余辉;石怀林
【作者单位】
【正文语种】中文
【中图分类】E3
【相关文献】
1.不列颠计划建立全球打击力量--英国未来空中力量评估
2.且看空中打击美军如何选目标
3.美军空中加油力量在困境中整合——透视美军KC-767空中加油机租借
计划4.美军将运用智能手机引导空中打击5.美空军远程空中打击力量再谋新发展因版权原因,仅展示原文概要,查看原文内容请购买。
空中加油
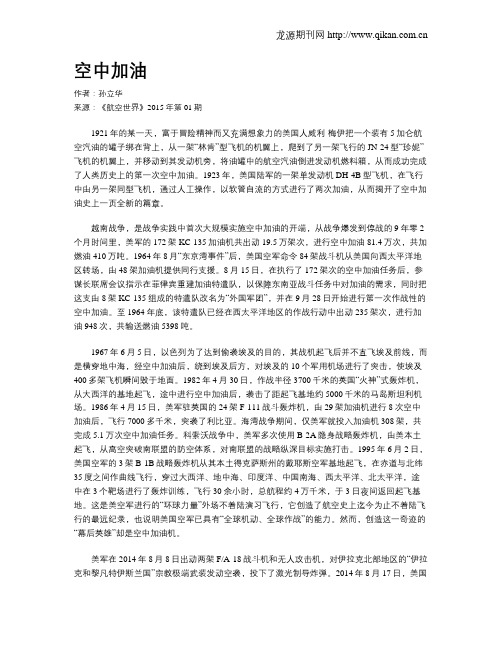
空中加油作者:孙立华来源:《航空世界》2015年第01期1921年的某一天,富于冒险精神而又充满想象力的美国人威利·梅伊把一个装有5加仑航空汽油的罐子绑在背上,从一架“林肯”型飞机的机翼上,爬到了另一架飞行的JN-24型“珍妮”飞机的机翼上,并移动到其发动机旁,将油罐中的航空汽油倒进发动机燃料箱,从而成功完成了人类历史上的第一次空中加油。
1923年,美国陆军的一架单发动机DH-4B型飞机,在飞行中由另一架同型飞机,通过人工操作,以软管自流的方式进行了两次加油,从而揭开了空中加油史上一页全新的篇章。
越南战争,是战争实践中首次大规模实施空中加油的开端,从战争爆发到停战的9年零2个月时间里,美军的172架KC-135加油机共出动19.5万架次,进行空中加油81.4万次,共加燃油410万吨。
1964年8月“东京湾事件”后,美国空军命令84架战斗机从美国向西太平洋地区转场,由48架加油机提供同行支援。
8月15日,在执行了172架次的空中加油任务后,参谋长联席会议指示在菲律宾重建加油特遣队,以保障东南亚战斗任务中对加油的需求,同时把这支由8架KC-135组成的特遣队改名为“外国军团”,并在9月28日开始进行第一次作战性的空中加油。
至1964年底,该特遣队已经在西太平洋地区的作战行动中出动235架次,进行加油948次,共输送燃油5398吨。
1967年6月5日,以色列为了达到偷袭埃及的目的,其战机起飞后并不直飞埃及前线,而是横穿地中海,经空中加油后,绕到埃及后方,对埃及的10个军用机场进行了突击,使埃及400多架飞机瞬间毁于地面。
1982年4月30日,作战半径3700千米的英国“火神”式轰炸机,从大西洋的基地起飞,途中进行空中加油后,袭击了距起飞基地约5000千米的马岛斯坦利机场。
1986年4月15日,美军驻英国的24架F-111战斗轰炸机,由29架加油机进行8次空中加油后,飞行7000多千米,突袭了利比亚。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4月22日,X-47B验证机从帕克图辛河海军航空站起飞,在切萨皮克湾上空与一架K-707加油机会合,成功地完成了自主空中加油(AAR,开创了无人驾驶飞机自主实现空中加油的新纪元。
此举显示,美国国防部经过十多年的探索、研究和试验,已经完全掌握了大幅延长无人机续航时间的关键技术,并正在影响到美国海军的作战理念,将改变未来侦察监视与远程打击的作战模式。
自主编队飞行
AAR技术的研究与发展得益于2000年启动的自主编队飞行(AFF计划。
NASA 希望这项计划能借助于仿生原理,通过模拟鸟类的V字形编队飞行,充分利用前方飞机机翼的翼尖涡,为后面紧随的飞机提供一股上洗气流,可以有效地产生升力,减小了飞行阻力,从而达到节省油耗和减少排放物的目的。
2000~2001年间,AFF计划通过飞行试验取得了理想的减阻效果,可以节省燃油14%。
在AAF计划实施过程中,波音公司扮演了至关重要的角色。
该公司与加州大学洛杉矶分校共同研制了编队飞行测量系统(FFIS,利用全球定位系统(GPS加上机载运动测试设备,将两架飞机之间的相对位置精度保持在30厘米以内。
同时,波音公司还与德莱顿飞行研究中心合作,为两架F/A-18试验机加装了编队飞行控制系统(FFCS。
更为重要的是,波音公司为AFF计划开发了机载无线局域网技术,可以使有人驾驶飞机和无人驾驶飞机同时登陆机载网络,共享极其精确的位置信息和飞行控制数据。
这项技术利用差分全球定位系统(DGPS的数据,可以获得精度达到厘米级的定位信息。
而且,这种机
载无线局域网就还可以使加油机的机组人员精确控制UAV进行加油,从而极大地增强安全性。
其后,NASA意识到这项技术在未来的无人机AAR方面具有潜在的应用前景。
初步研究表明,未来具备隐身能力的远程无人侦察与攻击平台只有通过空中加油才能达到最大航程的要求,但是考虑到卫星链路存在时间滞后的问题,空中加油不能仅
仅依赖地面控制人员的指令,必须实现自主化,即完全根据传感器的输入而排除人工干预的程序化操纵。
近年来,相关学科和技术的快速发展使AAR成为可能。
2002年,美国国防部预先研究计划局(DARPA针对发展UCAS持久作战能力的需要,考虑将AAR技术的后续研究正式列为“联合无人作战航空系统”(J-UCAS计划的一个子项目。
尽管J-UCAS计划半途中止,但美国海军在投资发展“无人作战航空系统验证”(UCAS-D计划时依然将AAR列为必不可少的试飞科目,旨在借助X-47B 验证机飞行测试证明AAR技术的可行性。
精确对接技术
与现役战斗机相比,无人机实现AAR无疑面临着诸多技术挑战。
2005
年,DARPA牵头发起了“自主空中加油验证”(AARD项目,旨在通过飞行测试研究受油机和加油探管在气流中的运动规律,为UCAS-D计划发展出可以在作战条件下自主完成空中加油的各项关键技术。
其中,至关重要的是实现对接的技术。
从空中加油方式来看,美国空军使用的伸缩套管式硬管空中加油比较容易实现自主对接,而美国海军使用的探管-锥套式软管空中加油相对难度较大。
为
此,DARPA决定直接验证无人机采用探管-锥套式加油技术如何能够精确地保持空间相对位置,在对接时达到厘米级精度。
AARD项目利用了欧米伽空中加油服务公司的K-707加油机和NASA的一架F/A-18试验机,均加装了GPS接收机、惯性测量装置和低宽带数据链。
为了能使受油机的加油探管准确地插入到加油机后拖曳的锥套中,NASA专门为F/A-18试验机加装了一套VisNav传感器系统,主要由半导体位置探测器(PSD、信号处理器和LED指示灯组成,有效地提高了AAR
系统的性能。
PSD将探测到的光信号转换为电信号,并依据电流的强弱获得光投影坐标,采用三角法测量原理,再通过信号处理来测量加油探管与锥套间的距离。
然而,AARD项目的试验过程并非一帆风顺。
在为期15个月的概念验证阶段,加油探管在前6次试飞中仅有2次进入到锥套范围内,直到在第7次试飞中才首次实
现了自主空中加油。
2006年8月30日,F/A-18试验机在进入自动操纵状态后,按照预先设计的程序与加油机组成编队,并控制加油探管准确无误地插入到锥套内,实现了自主空中对接。
此后,飞行试验进展顺利,在十几次试飞中先后测试了转弯过程中探管与锥套对接,并且还完成了在更远距离、更大高度差和更大偏航角度情况下接近加油机的试验。
试飞结果表明,AAR系统已经验证了在加油机后方3.7千米、下方约300米和偏离航向30°的情况下成功实现对接的能力。
更为重要的是,AARD项目充分表明了无人机完全可以首先借助GPS飞行到指定的航路点,然后切换到一个全自主的空中加油模式,从而在作战条件下自主地完成空中加油。
伙伴加油计划
基于AARD计划所取得的成果,DARPA认为无人机在AAR技术方面已不存在问题,只需进一步优化相关技术,通过型号试飞加以验证。
此时,DARPA针对UCAS-D计划的预期目标,
开始关注无人机的伙伴加油能力,作为AARD计划的后续研究。
当时,DARPA 所面临的一个棘手问题是如何补偿无人机在会合期间卫星控制链路出现的3.5秒延迟。
2007年,美国空军研究实验室(AFRL发起了一项“超长续航”(Ultra Long Endurance研究计划,旨在评估用可担负得起的固定翼无人机替代监视飞艇的可行性,除了“全球观察者”和“猎户座”等无人机方案外,同时还探索能够突破“全球鹰”的续航时间限制的相关技术。
针对美国海军和空军的共同需求,DARPA在2010年7月1日授予诺格公司一项价值3300万美元的KQ-X计划,用于验证一架“全球鹰”无人机通过伙伴加油技术,自主完成空中加油。
这项计划旨在验证两架无人机之间实现空中加油的技术可行性,使其飞行时间延长到一周以上。
如果试验获得成功,“全球鹰”可以配备更重的传感器载荷,在携带较少燃料的情况下起飞,随后在空中进行空中加油,以便在空中持续飞行更长时间。
此外,同一型号无人机具备伙伴加油能力也意味着,无人机完全可以自行编队执行任务,这对探索未来无人战机自主作战,甚至组成轰炸编队的可行性同样具有开创性意义。
从技术验证角度来看,KQ-X计划专注于无人机系统、感知和气动等方面的挑战,其难度远远高于AARD计划。
根据合同,诺格公司对两架“全球鹰”实施了相应改装,其中,一架无人机充当加油机,在腹部加装了软管-锥套加油系统,输油管长4.3米,另
一架无人机充当受油机,在机头前部加装了一根探管式受油管。
两架“全球鹰”将利用GPS和光学跟踪系统,实现探管与锥套的对接,并将燃油从加油机的机身油箱输送到受油机的机身油箱中。
2011年1月21日,诺格公司利用一架“海神”试验机在同温层高度与一架“全球鹰”无人机进行了会合,前后相距只有12.2米,评估了“全球鹰”尾部产生的湍流对受
油机的
潜在影响。
2012年8月,两架经过改装的“全球鹰”完成了空中加油编队飞行。
遗憾的是, DARPA在9月30日决定不再继续推进“全球鹰”伙伴加油的试飞工作,终止了KQ-X计划。
自主空中加油
作为UCAS-D计划的一个重要部分,美国海军和诺格公司原计划从2012年底开始准备AAR技术的相关测试工作,但是直到2014年6月,诺格公司才收到美国海军授予的一项6300万美元的附加合同,着手开展探管-锥套式空中加油的验证工作。
4月22日,X-47B验证机在试验过程中,首先借助于自主飞行控制系统和组合GPS飞行到会合空域,在1600米外开始跟踪K-707加油机,并逐渐接近到加油机一侧相距6米的位置,保持编队飞行方式。
接下来,X-47B验证机由“GPS引导”过渡到“光学引导”。
该机先利用传感器观察加油机的机翼一侧标志点,再通过机动飞行调整到加油机后方,然后利用一种新型光学传感器和摄像机组成的光学跟踪系统“锁定”加油机,再通过不断调整逐步建立和维持精确的对接距离。
最后,X-47B验证机自主地控制右侧机翼上受油管与加油锥套对接。
接着,K-707加油机在近7分钟时间内向其输送了1810千克的燃料。
在完成空中加油后,X-47B验证机自动地控制探管脱离锥套,机动地离开加油机,然后返回基地。
作为成功对接的关键技术,X-47B验证机使用的新型光学传感器是经过升级的VisNav 传感器系统。
从设计功能来看,这种光学跟踪系统采用了红外焦平面探测器,通过控制X-47B 验证机逐渐跟上锥套移动的节奏,让探管与锥套保持同步移动,从而有效地避免了战斗机在对接过程中存在着探管向上撞击到锥套、从软管上扯掉锥套或者探管损坏的缺点。
此次测试表明,美国海军已经完全掌握了AAR技术,可以有效地增加无人机的作战范围,对未来发展长续航能力的无人机至关重要。
对此,美国海军负责UCAS-D 计划的杜拉特上校表示,此次AAR试验的成功有助于“形成未来的无人机通过空中加油执行标准作战任务的概念,并且可以与舰载机联队的有人驾驶作战飞机无缝地实现协同作战”。
作为一个承前启后的关键角色,X-47B验证机在AAR测试中的出色表现必将对“舰载无人空中监视与打击系统”(UCLASS计划的任务需求和投标方案产生重要影响。
(温杰
江中眼小秘 /money/2015-05/28/content_1610.html 编
辑:dnchhds。