天虹伺服驱动器说明书.
Sun Fire T1000 伺服器 产品说明书

Sun Microsystems, 請將您對本文件的意見提交至:/hwdocs/feedbackSun Fire ™ T1000 伺服器產品說明文件號碼 819-5344-142007 年 3 月,修訂版 A請回收Copyright 2007 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, U.S.A. 版權所有。
Sun Microsystems, Inc. 對於本文件所述技術擁有智慧財產權。
這些智慧財產權包含 /patents 上所列的一項或多項美國專利,以及在美國與其他國家/地區擁有的一項或多項其他專利或申請中專利,但並不以此為限。
本文件及相關產品在限制其使用、複製、發行及反編譯的授權下發行。
未經 Sun 及其授權人 (如果有) 事先的書面許可,不得使用任何方法、任何形式來複製本產品或文件的任何部分。
協力廠商軟體,包含字型技術,其版權歸 Sun 供應商所有,經授權後使用。
本產品中的某些部分可能源自加州大學授權的 Berkeley BSD 系統的開發成果。
UNIX 是在美國及其他國家/地區的註冊商標,已獲得 X/OpenCompany, Ltd. 專屬授權。
Sun 、Sun Microsystems 、Sun 標誌、 、OpenBoot 、SunVTS 、Netra 、Sun Fire 、Java 、SunSolve 與 Solaris 是 Sun Microsystems, Inc. 在美國及其他國家/地區的商標或註冊商標。
所有 SPARC 商標都是 SPARC International, Inc. 在美國及其他國家/地區的商標或註冊商標,經授權後使用。
凡具有 SPARC 商標的產品都是採用 Sun Microsystems, Inc. 所開發的架構。
OPEN LOOK 與 Sun™ Graphical User Interface (Sun 圖形化使用者介面) 都是由 Sun Microsystems, Inc. 為其使用者與授權者所開發的技術。
天虹说明书

V=0
Y=0
S=0
开始,选复版,修改,挨针,他他米,跳针,改参数,副菜单1,副菜2,退出
1
2
3
4
5
6
7
8
9
用电笔将光标移到修改菜单,屏幕显示
1.
视窗放缩
2.
往前一针
3.
往后一针
4.
连接断点
5.
成组开始
6.
成组结束
7.
往指定针
上面的画面中有一“X”记号,这就是你刚才设定的起针点,至此你已完成工作,可进入图案的编辑。
下面就画面内容作一些解释:
(1)
跳线挨针
绣花机在做″挨针″的时候,针与针之间的距离最大只能是12.7mm,如果超过此距离它会在中间再下一针,有些图案挨针距离超过12.7mm且要求中间不下针,这时采用跳线挨针功能便可做到。
例如:若你选择键盘上的键位“8”,将又派生出图案修改菜单来。
屏幕将显示:
h=
x=
v=
y=
s=
dl=
边界
间线
密度线
阔窄
移动
╳
改参数
调整
退出
1
2 Leabharlann 3 4 5 6
7
9
2-4
开机的顺序
(1)首先打开稳压器并查看电压是否正常
(2)接着打开电脑主机电源
(3)打开显示器电源
(4)打开数化仪之电源供给器
将主程式磁盘插入驱动A,注意磁盘的防写开关必须拔上封住防写口
(注:出带,读带,绘图机待需要使用时才打开电源)
EP100伺服驱动器简明手册第七版

MaxsineEP100系列交流伺服驱动器简明手册第1章产品检查与安装1.3 伺服电机安装1.3.1 安装环境条件●工作环境温度:0~40℃;工作环境湿度:80%以下(无结露)。
●贮存环境温度:-40~50℃;贮存环境湿度:80%以下(无结露)。
●振动:0.5G以下。
●通风良好、少湿气及灰尘之场所。
●无腐蚀性、引火性气体、油气、切削液、切削粉、铁粉等环境。
●无水汽及阳光直射的场所。
1.3.2 安装方法●水平安装:为避免水、油等液体自电机出线端流入电机内部,请将电缆出口置于下方。
●垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速机内的油渍经由电机轴渗入电机内部。
●电机轴的伸出量需充分,若伸出量不足时将容易使电机运动时产生振动。
●安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴及编码器损坏。
1.4 电机旋转方向定义本手册描述的电机旋转方向定义:面对电机轴伸,转动轴逆时针旋转(CCW)为正转,转动轴顺时针旋转(CW)为反转。
图1.2 电机旋转方向定义第2章接线2.1 配线规格●线径:R、S、T、PE、U、V、W端子线径≥1.5mm2(AWG14-16),r、t端子线径≥0.75mm2(AWG18);●端子采用预绝缘冷压端子,务必连接牢固;●建议采用三相隔离变压器供电;2.2 配线方法●输入输出信号线和编码器信号线,请使用推荐的电缆或相似的屏蔽线,配线长度为:输入输出信号线3m以下,编码器信号线20m以下。
接线时按最短距离连接,越短越好,主电路接线与信号线要分离。
●接地线要粗壮,作成一点接地,伺服电机的接地端子与伺服驱动器的接地端子PE务必相连。
●为防止干扰引起误动作,建议安装噪声滤波器,并注意:1) 噪声滤波器、伺服驱动器和上位控制器尽量近距离安装。
2) 继电器、电磁接触器、制动器等线圈中务必安装浪涌抑制器。
3) 主电路和信号线不要在同一管道中通过及不要扎在一起。
●在附近用强烈干扰源时(如电焊机、电火花机床等),输入电源上使用隔离变压器可以防止干扰引起误动作。
FUJITSU PRIMERGY CX400 M4 多節點伺服器说明书

Data SheetFUJITSU PRIMERGY CX400 M4 多節點伺服器專為工作負載設計的模組機架式電源FUJITSU PRIMERGY伺服器能執行任何工作負載與因應瞬息萬變的業務需求。
隨著業務拓展,對於應用的需求也隨之升高。
每項需求均需佔用資源,因此必須尋找能夠優化運算的方式,為使用者提供更佳服務。
PRIMERGY系統具備完整的產品組合,包含適用於遠端分公司的PRIMERGY直立式伺服器、萬用機架式伺服器,以及密度最佳化的多節點伺服器,有助於提升運算能力,配合業務需求。
經得起商業考驗的創新系列產品,以其高效率降低營運的成本與複雜程度,使日常運作更加靈活,並可無縫整合,助您專注在核心業務上。
FUJITSU PRIMERGY CX多節點系統是雲端、超融合式與高效能運算解決方案的理想平台,提供資料中心與分公司大量的運算效能,以執行虛擬化環境、複雜運算、伺服器整併及高可用性情境。
PRIMERGY CX400 M4FUJITSU PRIMERGY CX400 M4提供可擴充的IT架構,以其高度靈活性幫助企業及研究機構快速因應劇烈的挑戰。
CX400 M4為適用於FUJITSU多節點系統的模組機箱,結合類刀鋒伺服器的密度、效率,以及機架式伺服器的簡潔與成本優勢。
2U機箱使企業得以依照業務需求,逐步增加或移除至多4個節點。
此款機箱容許節點與組件共享電源、冷卻與管理資源,具備熱插拔與備援電源供應器、熱插拔與備援風扇模組,並可容納多達24顆儲存磁碟。
PRIMERGY CX伺服器節點提供虛擬桌面(VDI)、架構虛擬化、高效能與技術運算、網路服務、雲端運算,亦可作為超融合架構。
Fujitsu ServerView Suite簡化並自動化伺服器產品的週期管理,使IT運作更有效率。
全新ServerView ISM管理軟體可協助管理資料中心與融合架構內的各式硬體資源,並可整合進其他雲端管理系統,涵蓋伺服器、儲存、網路與設備元件管理。
天虹伺服驱动器说明书

永磁同步电机驱动器用户手册THSR-A/B系列永磁同步电机驱动器用户手册-I-目录一.安装 (1)1.装时注意事项 (1)2.环境条件 (1)二.产品型号对照 (2)1.伺服驱动器铭牌说明 (2)2.驱动器型号说明 (2)三.驱动器外观及面板说明 (3)四.伺服驱动器尺寸图 (6)五.伺服电机尺寸图 (8)六.伺服驱动器与伺服电机搭配对照表 (10)七.驱动器使用电线规格 (11)八.控制信号标准接线图 (12)九.驱动器端子说明 (14)十.伺服驱动器信号输入输出回路图 (17)十一.驱动器接线方式 (18)1.绣花机主轴 (19)2.绣花机移框 (20)3.绣花机D轴 (21)4.绣花机H轴 (22)十二.参数表 (23)十三.驱动器异常报警 (24)附录:主轴/移框参数快速设置 (26)主轴参数快速设置 (26)移框参数快速设置 (26)永磁同步电机驱动器用户手册一. 安装1.装时注意事项1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有30cm的间距,这样可以减小电源对信号线的干扰;2)接线时,禁止将三相电源接至U、V、W端子上;3)确保接地良好;4)电机轴心必须与设备轴心对心良好;5)通电时,请勿拆卸驱动器、电机、或更改配线;6)通电运行时,请勿接触散热片,以免烫伤2.环境条件本产品驱动器使用环境温度为0°C ~ 50°C。
若环境温度超过45°C 以上时,请置于条件通风良好的场所。
长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。
如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。
而且也要注意机器的震动是否会影响配电箱的电子装置。
除此之外,使用的条件也包括:▲无发高热装置的场所;▲无水滴、蒸气、灰尘及油性灰尘的场所;▲无腐蚀、易燃性的气、液体的场所;▲无漂浮性的尘埃及金属微粒的场所;▲坚固无振动的场所;▲无电磁噪声干扰的场所。
100HA系列伺服驱动器使用说明书

6.2 第 2 层···································································································45 6.2.1 监视方式 ·····················································································45 6.2.2 参数设置 ·····················································································47 6.2.3 参数管理 ·····················································································47 6.2.4 速度试运行 ·················································································50 6.2.5 JOG 运行 ·····················································································50
第 6 章 显示与键盘操作·····················································································44 6.1 第 l 层····································································································44
伺服电机使用手册

不要接触电机、驱动器、制动电阻, 因为它们是发热部件
否则可能导致灼伤
不要接触运转中电机的转动部分 否则可能导致人身伤害
不要更改、拆卸或自行修理电机或 驱动器
否则可能导致触电事故,导致人身伤害
搬运电机时,不要提拉电缆或电机 轴部
否则可能导致器件损坏
在电源故障排除后,设备有可能突 然重新启动,所以不要靠近设备
备注:请勿按照电机端电源出线的线径选择电机电源电缆的线径,因为该线属于高温导线,尽管线径小,但
可以通过要求的电流。
4.2
运动随心,控制所欲
8
4.3 4.4 驱动器技术参数
伺服电机使用手册
运动随心,控制所欲
9
4.5 电机电源线接线定义
伺服电机使用手册
电机
电机型号
插头类型
40 型电机 57 型电机 76 型电机 92 型电机 123 型电机
3 4
控制线 编码器线
双绞屏蔽线
控制器至驱动器的控制线长度<3 米 驱动器至电机的编码器线长度<20 米
5
接地线
尽量使用粗导 线
接地电阻<100Ω 的一点接地方式
如电机与机床之间是 处于绝缘状态,请将 电机接地
6
模拟信号 屏蔽线
请注意终端联接
7
制动电阻
良好连接,良好通风
8
保持制动器
需要配浪涌吸收电路
4.1.2 驱动器安装注意事项
安装位置:室内,无水、无粉尘、无腐蚀气体、良好通风; 如何安装:垂直安装,通风良好; 安装到金属的底板上 如可能,请在控制箱内另外安装通风风扇 驱动器与电焊机、放电加工设备等使用同一路电源,或驱动器附近高频干扰设备,请采用隔离变压器 和有源滤波器 请将驱动器安装在干燥且通风良好的场所; 请尽量避免受到振动或撞击; 尽一切可能防止金属粉尘及铁屑进入驱动器内; 安装时请确认驱动器固定,不易松动脱落; 接线端子必须使用带有绝缘保护; 在断开驱动器电源后,必须间隔 10 秒钟后方能再次给驱动器通电,否则频繁的通断电会导致驱动器 损坏; 在断开驱动器电源后 1 分钟内,禁止用手直接接触驱动器的接线端子,否则将会有触电的危险! 当在一个机箱内安装多个驱动器时,为了驱动器的良好散热,避免相互间电磁干扰,建议在机箱内采 用强制风冷,请采用如下示意图进行安装
伺服驱动器使用说明书

MMT-直流伺服驱动器使用手册济南科亚电子科技有限公司直流伺服驱动器使用说明书一、概述:该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。
二、产品特征:◇PWM控制H桥驱动◇四象限工作模式◇全隔离方式设计◇线形度好、控制精度高◇零点漂移极小◇转速闭环反馈电压等级可选◇标准信号接口输入0--±10V◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10%220系列:AC :220V±10%◇主电源电压AC:110系列:AC 40----110V220系列:AC50---- 220V◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A)DC 10A(最大输出电流15A)DC 20A(最大输出电流25A)◇控制精度:0.1%◇输入给定信号:0—±10V◇测速反馈电压:7V/1000R 9.5V/1000R13.5V/1000R 20V/1000R可经由PC板内插片选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5ºC ~ +50ºC◇环境湿度:相对湿度≤80RH。
(无结露)◇避免有腐蚀气体及可燃性气体环境下使用◇避免有粉尘、可导电粉沫较多的场合◇避免水、油及其他液体进入驱动器内部◇避免震动或撞击的场合使用◇避免通风不良的场合使用五、电源输入说明该驱动系统分两路电源输入:即U1、V1为主电源输入,U2、V2为控制电表1注:1、驱动器的主电源(即U1 V1)独立供电时,若电源开路时,驱动器会报警(面板上的T.F灯亮)待故障排出后,驱动器自动回复正常。
混合式步进伺服驱动器用户手册说明书

2HSS57-N-XX混合式步进伺服驱动器用户手册地址:深圳市宝安区留仙三路鸿威工业区A栋2楼电话:*************26502268传真:*************E-mail:*******************本手册的所有内容,著作财产权归深圳市杰美康机电有限公司所有,未经深圳市杰美康机电有限公司许可,任何单位或个人不得随意仿制、拷贝、撰抄。
本手册无任何形式的担保、立场表达或其它暗示。
如有本手册所提到的产品的信息,所引起的直接或间接的资料流出,导致利益损失后果,深圳市杰美康机电有限公司与所属员工不承担任何责任。
除此以外,本手册提到的产品及其资料仅供参考,内容如有更新,恕不另行通知。
版权所有,不得翻印。
深圳市杰美康机电有限公司版本编写核准V2.10研发部研发部-2-目录目录 (3)一、概述 (4)二、特点 (4)三、端口说明 (5)3.1报警信号输出端口 (5)3.2刹车、到位信号输出端口 (5)3.3控制信号输入端口 (6)3.4编码器反馈信号输入端口 (7)3.5功率端口 (8)四、技术指标 (9)五、控制信号接线 (10)5.1控制信号单端共阳极接线 (10)5.2控制信号单端共阴极接线 (11)5.3控制信号差分接线方式 (12)5.4232串口通信接线图 (13)5.5控制信号时序图 (13)六、功能拨码和细分拨码开关设定 (15)6.1SW1单双脉冲选择 (15)6.2SW2逻辑方向设定 (15)6.3SW3-SW6细分设置 (15)6.4SW7指令平滑设置 (16)6.5SW8开/闭环模式选择 (16)七、错误报警及LED灯闪烁次数 (17)八、安装尺寸 (18)九、接线图 (19)十、参数设置 (20)十一、常见问题及故障处理 (26)-3-一、概述2HSS57-N-XX混合式步进伺服驱动系统是在数字步进驱动中完美融合了伺服控制技术,产品采用光学编码器,每50微秒高速采样位置反馈,一旦出现位置上的偏差可立即修正位置偏差量。
伺服说明书

翻译:秦刚1 / 14页概 要TB 系列刀架是通过伺服电机和型号为SA-01A-TB 的伺服放大器来控制的。
其中伺服放大器置于电器柜内(尺寸为:325X210X80mm )伺服放大器能够根据系统的换刀要求来控制伺服电机以及与机床进行逻辑通讯。
注意:若参数改动恕不通知翻译:秦刚2 / 14页索 引概述 第1页 索引 第2页 电器连接图(总图) 第3页 电器连接图(分图) 第4页 输入输出信号连接 第5页 如何选择刀架的型号 第6页 模式设定(0) 第7页 模式设定(1) 第8页 模式设定(1)举例 第9页 模式设定 (2-3-4) 第10页 模式设定(5-6) 第11页 模式设定(7) 第12页 启动—找零 第13页 诊断报警处理 第14页 使用各项功能前,请阅读手册中的说明 请勿触动伺服放大器内部器件 如必须的情况下,应由有经验的技术人员方可触动其内部部件,我们建议,至少 等待5分钟,使其电容充分放电后,再打开伺服放大器的外壳。
说 进 们将 质翻译:秦刚3 / 14页刀架-伺服驱动器-电磁阀之接线刀架使用液压控制锁紧和松开的模式下,详细的技术参数流量,油压,电磁阀等参见TB002-C ,第20页。
必须安装继电器,应为800mA LO.3和LO.4输出不能够直接控制电磁阀翻译:秦刚4 / 14页输入输出电缆连接(伺服放大器和系统)翻译:秦刚5 / 14页输入输出电缆连接(伺服放大器和系统)v3-DB37输入/出37针母接头(焊接端)N.B.要求+24V 信号输入24V 直流电+/-10%最大50W 2安培保险报警输出24V 最大100毫安刀架锁紧信号24V 最大100毫安 刀架到位信号24V 最大100毫安刀架型号选择根据第6页的图跳接附带奇偶校验的目标刀号码和启动码 见第8页操作模式选择见第7---12页N.C.=不连接 N.U.=不使用翻译:秦刚6 / 14页预留个人参数设定口通过伺服放大器设定刀架型号及工位数伺服放大器中的PIN4(+24V)和PIN 19-37-18-12-30的不同组合连接,代表着不同的刀架型号,下图中的十进制一栏里的数值是与左侧二进制所表示的数值一致,供参考。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
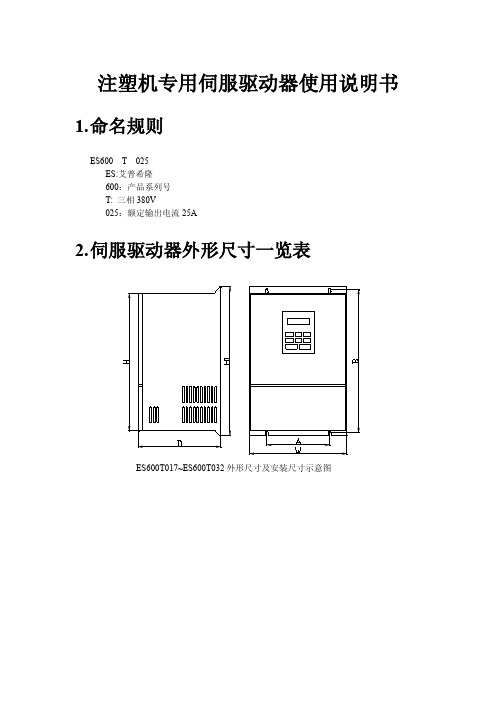
注塑机专用伺服驱动器使用说明书
制动电阻推荐阻值 ≥65Ω ≥43Ω ≥32Ω ≥25Ω ≥22Ω ≥16Ω ≥16Ω ≥16Ω ≥8Ω
6 伺服驱动器功能码:
6.1 驱动器、伺服电机参数组 Pr0
功能码 Pr0.00 Pr0.01 Pr 0.02 Pr 0.03 Pr 0.04 Pr 0.05 功能码描述 电机额定功率 电机额定电压 电机额定电流 电机额定频率 电机额定转速 永磁电机 D 轴电感 设定范围 7.5KW~55KW 0V~440V 17~75A 0~最大频率 0~30000rpm 0~65535 最小单位 0.1KW 1V 0.1A 0.01Hz 1rpm 1 出厂值 机型确定 机型确定 机型确定 机型确定 机型确定 机型确定 更改说明 ★ ★ ★ ★ ★ ★
永磁电机 Q 轴电感 永磁电机定子电阻 永磁电机位置传感 器每周脉冲数 永磁电机位置传感 器类型 永磁电机位置传感 器安装角度 永磁电机旋转编码 器极对数 驱动器设定运行频 率 驱动器最大运行频 率 输出转矩上限 驱动器运行上限频 率 电机运行加速时间 电机运行减速时间 电机运行方向选择 永磁电机反电动势 速度环比例增益 1 速度环积分增益 1 转折频率 1 速度环比例增益 2 速度环积分增益 2 转折频率 2 驱动器调谐方式选 择
CN5:
T/A2 T/C2 T/A3 T/C3
3.2.3 控制信号端子定义
类别 端子符号 PE +10V 电源 +13V +24V OP 模拟量输入 AI1 端子名称 接地端子 +10V 电源 压力传感器电源 +24V 电源 外部电源输入端子 模拟量输入端子 1 说明 信号线屏蔽外壳接地端子 10V±10%,最大 10mA 13±10%,最大 10mA +24V 电源,用于 DI 出厂时与+24V 短接, 使用外部电源 时,必须将 OP 与+24V 断开 输入范围:±10V
伺服软件使用说明_最简洁版

ECO2WIN使用说明-简洁版深圳市步科电气有限公司目录第一部分: 特别需要注意的事项 (3)第二部分: 建立一个简单的工程 (9)第三部分: 进行简单的控制 (16)1功能介绍 (16)2 驱动器关键参数的设置 (17)电机参数设置 (17)电流环参数 (19)速度环PID调节 (20)位置环PID调节 (21)3 保存参数: (22)4 绝对位置、相对位置控制 (25)5 速度模式 (27)6 原点模式 (29)7 脉冲方向控制模式(跟随模式) (30)第四部分: 故障诊断 (34)第一部分: 特别需要注意的事项1、EC2WIN的所有文件,包装安装文件、电机参数文件、工程文件等都需要您放在英文目录下,同时必须详细阅读该手册里所有粗体或者带颜色的字体,运行电机前请确保所有连接线均正确连接到驱动器上;2、PC与ED伺服之间的连线为2、3、5脚直连线;3、如果您使用的是ED400、ED430、ED600、ED630系列的伺服驱动器,请先更新软件再进入下一步。
更新软件方法如下:把附件里的“DEV”文件夹里的两个文件解压出来,然后复制到EC2WIN的安装目录D:\Program Files\JAT\ECO2WIN\Dev里的两个文件“ENU和DEU”两个文件夹,替换以前的这两个文件即可。
4、如果您使用的3相电机,那么在新建或者连接已经建好的工程之前先用ECO2LOAD软件更新电机参数,三相电机的参数文件请参考附件,这些参数包括位置环、速度环、电流环、电机参数设置等参数,这样可以节省您设置这些参数的时间,同时也避免不小心设置成一个错误的值。
更新方法如下:1、打开“开始”菜单里的ECO2LOAD软件:2、然后进入软件界面:Write data into device:写参数到伺服驱动器;Read date out-of device:从伺服里读参数到文件Administration:管理伺服驱动器,用于重启和存储参数Load parameter list:选择读、写参数的内容,用来选择所要读取和做写入的是驱动器的哪些参数,正常情况下不用动这个按钮。
伺服电机使用手册
伺服拖动系统使用手册(V1.0)哈尔滨晟普科技有限公司前言感谢您购买晟普科技SP系列抽油机伺服拖动系统。
本使用说明书介绍了如何正确使用SP系列抽油机伺服拖动系统。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本使用说明书。
另外,请在理解产品的安全注意事项后再使用该产品。
与安全有关的标记说明本手册根据与安全有关的内容,使用了下列标记。
有安全标记的说明,表示重要内容,请务必遵守。
表示如果操作错误,将会导致危险情况的发生,造成死亡或重伤。
表示如果操作错误,将会导致危险情况的发生,可能会造成中等程度的受伤或轻伤,或设备损坏。
另外,即使是标识中所述事项,有时也可能会造成严重的后果。
表示不属于“危险”和“注意”,但非常重要,需要用户遵守的事项。
安全注意事项⏹到货时确认◆请勿安装受损或缺少零件的伺服驱动器和电机否则会有受伤的危险。
⏹保管与搬运◆搬运伺服驱动器时轻拿轻放;运输时,确保伺服驱动器包装完好,防止振坏。
◆请勿保管在下述环境中,否则会导致触电、机器损坏或引发火灾:•阳光直射的场所•环境温度超过保管、设置温度条件的场所•相对湿度超过保管、设置湿度条件的场所•有水、油及药品滴落的场所•振动或冲击可传递到主体的场所◆请勿盘坐在本产品上或者在其上面放置重物.否则可能会导致设备故障或人员受伤◆请勿握住电缆线或电机轴进行搬运。
否则会导致设备故障或人员受伤⏹安装◆安装时请轻拿轻放。
◆只有具备资格的电气工程师才允许安装和维护伺服单元。
◆请勿将该产品安装在会溅到水的场所或易发生腐蚀的环境中。
否则可能会导致触电或引发火灾。
◆请勿将该产品安装在易燃性气体及可燃物的附近。
否则可能会导致触电或引发火灾。
◆安装过程中请勿使异物进入产品内部。
否则可能会导致故障或引发火灾。
◆请确保伺服单元与其他机器之间具有规定的间隔。
否则会导致故障或引发火灾。
◆请勿施加过大冲击。
否则可能会导致故障。
◆伺服驱动器外壳必须安全接地。
⏹配线◆请勿在伺服单元的输出端子U、V、W上连接三相AC380V电源。
伺服驱动器外部接线与详细说明
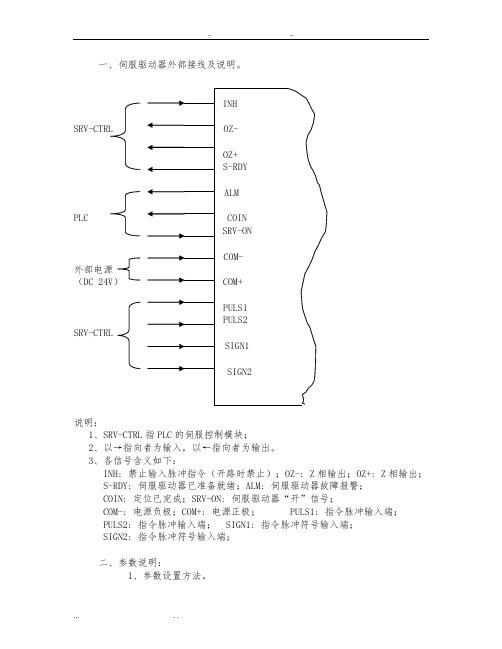
一、伺服驱动器外部接线及说明。
SRV-CTRLPLC外部电源(DC 24V)SRV-CTRL说明:1、SRV-CTRL指PLC的伺服控制模块;2、以→指向者为输入,以←指向者为输出。
3、各信号含义如下:INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出;S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警;COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号;COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲输入端;PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端;SIGN2: 指令脉冲符号输入端;二、参数说明:1、参数设置方法。
操作面板上共有5个按键,意义如下:MODE:模式转换键,按此键可在4个模式间切换,这4个模式是:DP-××××: 选择监视项目(共有7个, 在按 MODE键显示DP-××××后先按SET,再按↑或↓选择)⑴、DP-EPS: 位置偏差;⑵、DP-SPD: 转速;⑶、DP-TRQ: 转矩;⑷、DP-CNT: 控制方式;⑸、DP-IO: 输入输出信号状态;⑹、DP-ERR: 错误信息;⑺、DP_NO: PR-××××: 设定参数。
EE-××××: 写入参数。
AT-××××: 自动增益调整。
SET:为设定及确认键。
↑:数值增加或移动到下一个选项;↓:数值减少或移动到上一个选项;←:数位间移动;具体设置步骤详见有关Driver的补充信息说明:1、参数后加“#“者为需要更改的,如02号参数实际应用中应设为0;2、控制方式含义T:转矩控制S:速度控制P:位置控制3、出厂设定为”*”者为出厂时未设置,需根据实际自行设置;4、其余参数可使用出厂设置;5、最后一栏为新Driver与之对应的参数(有些没有);6、更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对应的参数;7、以下表格为Driver实际参数设置表。
伺服放大器使用说明书

伺服放大器使用说明书一、概述伺服放大器是自动控制系统中的一个重要组成单元,和电动执行机构配套,组成比例式电动控制机构,可广泛用于电力、冶金、化工、轻工等工业部门的自动控制系统中。
它可与DDZ-S系列电动执行机构配套,也可作为一个通用单元,应用在其它类型的电动执行机构上。
与其它类型的伺服放大器比较,有如下特点:1.电路采用智能控制系统对输入电流与反馈电流进行采样、比较,依据它们的差值大小对电机进行正反转控制。
2.系统对死区和精度进行自动调节,使控制品质最优。
3.也可手动调节死区大小以适应现场实际要求。
4.具有输入信号断路或小于一定值、位置反馈信号断路或小于一定值、反馈信号不跟随或反向变化大于一定值或固态继电器输出短路时,系统自动保护防止执行机构动作错误的功能以及开路报警、断电抱闸等功能。
二、主要技术指标1.输入信号:4~20mA2.阀位反馈输入信号:4~20mA3.输入通道:2个4.输入阻抗:250Ω5.输出功率:220VAC5A6.最大误差:2.5%7.报警输出:无源接点1常开1常闭8.工作电压:220VAC50Hz9.工作条件:环境温度0~50℃相对湿度〈85%三、接线端子图2-b9 电流输入+2-a9 电流输入-2-b11 阀位反馈输入+2-a11 阀位反馈输入-2-b3 故障状态信号输出端常闭点2-b4 常开点2-b5 公共点1-b13 接大地1-a8 火线1-a7.10 零线1-a5 接电机正转线圈1-b3 接电机反转线圈1-b8 接抱闸线圈注意: 电机接线要分清正反,正转时阀门开大,反转时阀门关小,并且阀门开度要与位返电流变化方向一致。
四、仪表的调试仪表功能性测试用两路信号源作输入信号,三个220V灯泡作负载, 2-b9 2-a9 输入一路4~20mA信号2-b11 2-a11 输入另一路4~20mA信号1-a5 1-a7 接一灯泡定义为D11-b3 1-a7 接一灯泡定义为D21-b8 1-a7 接一灯泡定义为D3正确接线后通电1、当输入电流IN大于反馈电流WF时D1灯亮2、当输入电流IN等于反馈电流WF时灯不亮3、当输入电流IN小于反馈电流WF时D2灯亮4、当输入电流IN或反馈电流WF的值小于3.5mA或断路时面板上黄灯亮,同时系统切断总电源并且送出抱闸信号(D3灭)和报警信号(常闭接点断开)。
天虹一体化播出系统使用说明书

超越播出说明书目录一、软件安装: (2)二、软件使用 (16)1、软件启动与配置 (16)2、软件目录 (20)3、软件界面介绍 (20)4、软件功能操作介绍 (26)4.1、播出节目单编辑 (26)4.2、节目单调用以及游字等编辑 (31)4.3、其它操作 (37)4.4、预监介绍 (44)三、离线编单使用 (46)一、软件安装:1.安装“WindowsInstaller3_1”,在dotNet3.5文件夹下,双击“WindowsInstaller 3.1”开始安装,点击“下一步”:选择“我同意”,点击“下一步”:弹出对话框,点击“继续”等待安装完成即可。
2.安装“dotNetFx35setup”,在dotnet3.5文件夹下,双击“dotNetFx35setup”,选择“我已阅读并接受许可条款”安装,等待安装完毕即可。
3.安装“dotNetFx40_Full_x86_x64”,双击“dotNetFx40_Full_x86_x64”安装,选择“我已阅读并接受许可条款”安装,点击“安装”,等待安装完成即可。
4.安装板卡驱动“TSD800_X86”,双击“TSD800_X86”安装,选择Next,进行安装:选择安装路径,点击Next,点击Install,等待安装完成即可。
Windows 7安装驱动同上;Windows X64位系统安装TSD800_X64Decklink卡安装驱动,双击DesktopVideo_9.8.msi开始安装点击Next继续安装点击Next继续安装勾选同意,点击Next继续安装点击Install安装选择安装“仍然继续”,连续弹出六次同样的窗口,点击“仍然继续”选择第一项,点击下一步选择第一项,点击“下一步”继续继续选择“仍然继续”安装完成,点击完成;出现以上安装界面连续三次,选择同样的安装方式,完成Decklink 卡驱动安装点击Finish结束安装5.安装“UsbDog驱动”,双击“UsbDog驱动”软件安装,选择“中文”,点击“确定”开始安装。
IS100伺服驱动器使用手册.

6.8 FP组用户参数............................................................................- 41 -第七章应用与调试....................................................................................- 43 -
使用本产品时,请务必按规定装好外壳或遮盖物,并按照说明书的内容进行操作。
♦本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
♦由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
♦由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
6.3 F2组性能控制参数......................................................................- 32 -
6.4 F3组速度参数............................................................................- 35 -
控制同步机的场合,请确保第一次运行前进行电机参数调谐,否则电机有飞车危险。
控制器的任何部分无须进行耐压试验,出厂时产品已作过此项测试。否则引起事故!
危险
控制器必须盖好盖板后才能上电。否则可能引起触电!
所有外围配件的接线必须遵守本手册的指导,按照本手册所提供电路连接方法正确接线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电机驱动器用户手册THSR-A/B系列永磁同步电机驱动器用户手册-I-目录一.安装 (1)1.装时注意事项 (1)2.环境条件 (1)二.产品型号对照 (2)1.伺服驱动器铭牌说明 (2)2.驱动器型号说明 (2)三.驱动器外观及面板说明 (3)四.伺服驱动器尺寸图 (6)五.伺服电机尺寸图 (8)六.伺服驱动器与伺服电机搭配对照表 (10)七.驱动器使用电线规格 (11)八.控制信号标准接线图 (12)九.驱动器端子说明 (14)十.伺服驱动器信号输入输出回路图 (17)十一.驱动器接线方式 (18)1.绣花机主轴 (19)2.绣花机移框 (20)3.绣花机D轴 (21)4.绣花机H轴 (22)十二.参数表 (23)十三.驱动器异常报警 (24)附录:主轴/移框参数快速设置 (26)主轴参数快速设置 (26)移框参数快速设置 (26)永磁同步电机驱动器用户手册一. 安装1.装时注意事项1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有30cm的间距,这样可以减小电源对信号线的干扰;2)接线时,禁止将三相电源接至U、V、W端子上;3)确保接地良好;4)电机轴心必须与设备轴心对心良好;5)通电时,请勿拆卸驱动器、电机、或更改配线;6)通电运行时,请勿接触散热片,以免烫伤2.环境条件本产品驱动器使用环境温度为0°C ~ 50°C。
若环境温度超过45°C 以上时,请置于条件通风良好的场所。
长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。
如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。
而且也要注意机器的震动是否会影响配电箱的电子装置。
除此之外,使用的条件也包括:▲无发高热装置的场所;▲无水滴、蒸气、灰尘及油性灰尘的场所;▲无腐蚀、易燃性的气、液体的场所;▲无漂浮性的尘埃及金属微粒的场所;▲坚固无振动的场所;▲无电磁噪声干扰的场所。
第1页永磁同步电机驱动器用户手册第2页二. 产品型号对照1.伺服驱动器铭牌说明2.驱动器型号说明THSR A 10伺服驱动器功率 公司产品名称伺服驱动器序列 07:750WTHSR :天虹伺服驱动器A :主轴伺服 10:1.0KW 15:1.5KW 20:2.0KW30:3.0KWB:移框伺服永磁同步电机驱动器用户手册第3页三. 驱动器外观及面板说明THSR-A04 、THSR-A07、THSR-A10、THSR-A15 、THSR-B10、THSR-B15U V WL1L2L1c L2cC N 3C N 2C N 1数码管显示按键电机编码器连接端子控制信号连接端子通讯连接端子电机动力线连接端子控制电路电源输入端主回路电源输入端散热器永磁同步电机驱动器用户手册第4页THSR-A20及THSR-A30数码管显示按键电机编码器连接端子控制信号连接端子通讯连接端子电机动力线连接端子散热器WVUCN3CN2CN1FGTSR电源输入端子永磁同步电机驱动器用户手册第5页面板操作说明按键符号按键名称 按键功能说明模式选择键 功能选项的进入和退出数字增加键 1.功能选项的选择 2.参数值的选择数字减少键 跳跃、移位键 1.功能选项的选择时进行20的跳跃。
2.参数值的设定时进行左循环操作。
参数设定键1.功能选择设定的确认2.参数值设定的确认永磁同步电机驱动器用户手册第6页四. 伺服驱动器尺寸图THSR-A04、THSR-A07、THSR-A10、THSR-A15、THSR-B10、THSR-B15尺寸图1961798.55459251.569 4.6150永磁同步电机驱动器用户手册第7页THSR-A 20、THSR-A 30 尺寸图1971808.510454651.520982 4.6永磁同步电机驱动器用户手册第8页五. 伺服电机尺寸图60ST-M0133080ST-M2430110、130系列110系列130系列型号4030 6030 4025 7725 10025 15020 LA 187 217 164 196 217 260 LB 55 55 57 57 57 57 LC 5 5 5 5 5 5 LD 12 12 13 13 13 13 LE 95 95 110 110 110 110 LF 110 110 130 130 130 130 LG 130 130 145 145 145 145 LZ 9 9 9 9 9 9 S 19 19 22 22 22 22六. 伺服驱动器与伺服电机搭配对照表伺服驱动器伺服电机推荐带载头数名称型号功率型号功率主轴伺服驱动器主轴400W THSR-A04 400W60ST-M01330400W 1-2头主轴750W THSR-A07 750W80ST-M02430750W 6头以下主轴1kW THSR-A10 1KW130ST-M040251.0KW 15头以下主轴1.5KW THSR-A15 1.5KW130ST-M077252.0KW 30头以下主轴2.0KW THSR-A20 2.0KW130ST-M100252.6KW 30-50头主轴3.0KW THSR-A30 3.0KW130ST-M150203.1KW 50-70头位置伺服驱动器移框1.0KW THSR-B10 1KW110ST-M040301.0KW 12头以下移框1.5KW THSR-B15 1.5KW110ST-M060301.5KW 40头以下链式毛巾绣H轴THSR-B15 1.5KW110ST-M060301.5KW 22头以下链式毛巾绣D轴THSR-B15 1.5KW110ST-M040301.0KW 22头以下盘带绣M轴THSR-B15 1.5KW130ST-M077252.0KW 20头以下七. 驱动器使用电线规格连接端驱动器规格及使用电线规格(mm²)端子符号名称THSR-A04 THSR-A07 THSR-A10 THSR-A15 THSR-B10 THSR-B15L1、L2 主回路电源输入端≥1≥1≥1≥1.5L1c、L2c 控制电路电源输入端≥0.75≥0.75≥0.75≥0.75U、V、W 电机动力连接端≥1≥1≥1≥1CN1 电机编码器连接端≥0.12mm²的屏蔽线CN2控制信号连接端≥0.2mm²的屏蔽线连接端驱动器规格及使用电线规格(mm²)端子符号名称THSR-A20 THSR-A30R、S、T 电源输入端≥2.0 ≥3.5 外接电源使用单相电请接S、T两端U、V、W、FG 电机动力连接端≥1.5 ≥2.5CN1 电机编码器连接端≥0.12mm²的屏蔽线CN2 控制信号连接端≥0.2mm²的屏蔽线八. 控制信号标准接线图THSR-A04 、THSR-A07、THSR-A10、THSR-A15 、THSR-B10、THSR-B15非熔断断路器L1L2cL2L1c 单项220VAC单项220VACFG 21922108P24PPI24V 24V 2313IN2IN1IN3IN4IN5GND123196185PPI PPI CA+CA-CB+CB-伺服激磁备用备用备用12V~24V脉冲指令输入A 脉冲指令输入B +207Vref AGND 模拟量信号输入-C N 1215316417A A BB Z Z编码器信号输出2411P241213OUT1OUT2OUT3GND1UV W FGRS 485连接PC驱动器外壳电机编码器信号输入电机电源输出AC SERVO DRIVE驱动器报警输出备用J12J13THSR-A20、THSR-A30非熔断断路器R S T三相220VACFG 21922108P24PPI24V 24V 2313IN2IN1IN3IN4IN5GND123196185PPI PPI CA+CA-CB+CB-伺服激磁备用备用备用12V~24V脉冲指令输入A 脉冲指令输入B +207Vref AGND 模拟量信号输入-C N 1215316417A A B B Z Z编码器信号输出2411P241213OUT1OUT2OUT3GND1UV W FGRS 485连接PC驱动器外壳电机编码器信号输入电机电源输出AC SERVO DRIVE驱动器报警输出备用J12J13九. 驱动器端子说明端子座引脚说明引脚说明引脚符号说明主回路电源L1 、L2 连接外部AC电源。
AC220V,单相50/60Hz控制电路电源L1c 、L2c 连接外部AC电源。
AC220V,单相50/60Hz电机电源输出端U、V、W 连接电机电源线,三相输出220V,0~200Hz驱动器外壳接地端子FG驱动器与大地连接点,此接点与电机外壳接地端子在驱动器内部共点引脚说明引脚符号说明THSR-A20、THSR-A30适用主回路电源R、S、T 连接外部AC电源。
三相AC220V、50/60Hz若连接单相电源AC220V,连接S、T 端电机电源输出端U、V、W、FG连接电机电源线,三相输出220V,0~200Hz驱动器外壳接地端子FG驱动器与大地连接点,此接点与电机外壳接地端子在驱动器内部共点CN1控制信号引脚说明引脚编号引脚名称引脚符号说明1 电源输出-端GND编码器5V电源,由驱动器提供6 电源输出+端VCC2A相编码器输入A-编码器A相由电机输出至驱动器3 A+4 B相编码器输入B+ 编码器B相由电机输出至驱动器5 B- 14 Z 相编码器输入 Z+ 编码器Z 相由电机输出至驱动器 10 Z- 7 U 相编码器输入 U+ 编码器U 相由电机输出至驱动器 11 U- 12 V 相编码器输入 V+ 编码器V 相由电机输出至驱动器 8 V- 13 W 相编码器输入W+ 编码器W 相由电机输出至驱动器 9 W- 外壳屏蔽线FG连接信号线的屏蔽层CN2控制信号引脚说明 引脚编号引脚名称引脚 符号说明1、14 24电源端 +24V 当J12跳线端子连接P24和24V 时,IO 口电源由内部24V 提供 13、25 IO 电源地 GND1 IO 电源输入0V 端23 外部输入电源 PPI 当J12跳线端子连接P24和PPI 时,IO 口电源由外部提供2 编码器信号输出(A 相) A_DIV+ 将电机的编码器信号输出15 A_DIV- 3 编码器信号输出(B 相) B_DIV+ 16 B_DIV- 4 编码器信号输出(Z 相) Z_DIV+ 17 Z_DIV- 5 指令脉冲输入B- CB- 驱动器可接受两种不同的指令脉冲种类:1. 脉冲+方向模式2. 双脉冲模式18 指令脉冲输入B+ CB+ 6 指令脉冲输入A- CA- 19指令脉冲输入A+CA+7 模拟地 AGND 外接模拟量时,接模拟量信号的地线20 模拟量输入 V_ref 模拟量输入范围-10~+10V 21 伺服激磁In1 当管脚与GND1短路时,伺服进入运行状态 9 In2 备用信号输入口 22 In3 备用信号输入口 10 In4 备用信号输入口 8 In5 备用信号输入口11 异常报警1 Out1 异常报警时,端口输出低电平信号24 异常报警2 Out2 12 异常报警3 Out3 异常报警时,端口输出高电平信号外壳 屏蔽层FG连接信号线的屏蔽层CN3通讯信号引脚说明引脚编号 引脚名称 引脚 符号 说明1、2 通讯电源输出端 VCC2 采用485通讯方式,通讯频率38400Hz3、4 通讯信号传输A 485A 5、6 通讯信号传输B 485B 7、8通讯电源地GND1十. 伺服驱动器信号输入输出回路图控制信号输入电路2.4K2.4K2.4K2.4K2.4K内部24V23GND21922108PPIIN1IN2IN3IN4IN5伺服使能12V24VCN2伺服驱动器侧J12VPP(12~24V)P24R 106330R1243U10TLP127V3.3R 107330R1243U11TLP127R 108330R1243U15TLP127Out3OUTP3Out2OUTP2Out1OUTP1V6V5V7E2C3B 1Q1PNPP24R 715.1k 控制信号输出电路11241213电源地最大100mA最大100mA最大100mACN2伺服驱动器侧编码器反馈脉冲信号输出分频电路215316FAFBFZ417AM26LS31或等效产品DIV-A+DIV-A-DIV-B+DIV-B-DIV-Z+DIV-Z-OAOA+OA-OBOB+OB-OZOZ+OZ-AM26LS32或等效产品CN2双绞线伺服驱动器侧普通脉冲串指令接口1.差分电路CN2220R220RC A+C A-V3.313546O1Dir220R220RC B+C B-V3.313546O1Clk196185双绞线伺服驱动器侧模拟量信号输入Vref 32141115k 207AGN D外部模拟量速度信号外部模拟量参考地用双绞线伺服驱动器侧2.集电极开路(OC )电路CN21K220RC A-V3.313546Dir1K220RC B-V3.313546Clk2365Q?NPN1Q?NPN1RRVPP(12~24V)J13ON/OFFON/OFF(VPP-1.2)--------------- =10mA (1220+R)J13加断路器伺服驱动器侧十一. 驱动器接线方式电源输入端插拔端子头4PIN L1L2L1c L2c备注连接外部单相AC电源连接外部单相AC电源电机动力线接线方式航空插头编号: 1 2 3 4 定义GND U V W 插拔端子头3PIN U V W电源输入端(THSR-A20、THSR-A30系列)插拔端子头3PIN R S T 备注连接外部三相AC220V电源注意:若使用的是单相AC220V电源,请使用S、T端口电机动力线接线方式(THSR-A20、THSR-A30系列)航空插头编号: 1 2 3 4 定义GND U V W 插拔端子头4PIN FG U V W电机编码器线接线方式(适用所有型号)DB15 插头编号 6 1 3 4 14 2 5 10编码器插头信号引线5V 0V A+ B+ Z+ A- B- Z- 插头编号 2 3 4 5 6 7 8 9DB15 插头编号7 12 13 11 8 9 外壳编码器插头信号引线U+ V+ W+ U- V- W- PE 插头编号10 11 12 13 14 15 11.绣花机主轴控制信号线接线方式(大豪版)伺服端CN2端子(将内部跳线端子J12的P24和PPI相连)DB-25 25 23 5 9 21 13定义GND PPI CB- IN2 IN1 GND备注电源地外部电源脉冲信号脉冲使能外接使能开关使能开关地电控端YEC557插头4IN2 15 PPI 2 CB-6GND32.绣花机移框控制信号线接线方式(大豪版)伺服端CN2端子(将内部跳线端子J12的P24和24V相连)管脚12 8 25 19 6 18 5 21定义OUT3 IN5 GND CA+CA- CB+ CB- IN1备注报警输出手动移框使能电源地脉冲A+脉冲A-脉冲B+脉冲B-外接使能开关电控端CH2510端子管脚 1 2 3 4 5 6信号CB- CB+ CA- CA+ 12V GND备注CN2端12脚接线在CH2510悬空不接(报警信号输出,功能保留)CN2端8脚接线在CH2510悬空不接(手动移框使能,功能保留)3.绣花机D轴控制信号线接线方式(大豪版)伺服端CN2端子管脚12 25 19 6 18 5 21 13 定义OUT3 GND CA+ CA- CB+ CB- IN1 GND备注报警输出电源地脉冲A+脉冲A-脉冲B+脉冲B-外接使能开关使能开关地电控端CH2510端子管脚 1 2 3 4 5 6 7 8信号CB+ CB- CA- CA+ NC NC 12V GND备注CN2端12脚接线在CH2510悬空不接(报警信号输出,功能保留)4.绣花机H轴控制信号线接线方式(大豪版)伺服端CN2端子管脚12 25 19 6 18 5 21 13 定义OUT3 GND CA+ CA- CB+ CB- IN1 GND内容报警输出电源地脉冲A+脉冲A-脉冲B+脉冲B-外接使能开关使能开关地电控端CH2510端子管脚1 2 3 4 5 6 7信号CB- CB+ CA+ CA- NC 12V GND内容CN2端12脚接线在CH2510悬空不接(报警信号输出,功能保留)十二. 参数表功能号功能说明初始值主轴推荐值移框推荐值更改有效基本参数F000设为0000的时候重新上电恢复出厂默认值设为0008的时候,电机正转设为0009的时候,电机反转9 89 在线F001控制模式:0:内部给定4:速度控制模式6:袜机7:主轴、移框、D轴、H轴7 7 7 在线F005主界面显示选择设定1:实际电机速度2:电流A 3:电流B9:母线电压11:散热器温度100:软件版本号1 1 1 在线F009 UVW信号设置0 0 0 在线F010伺服通信选择:1:通信模式关闭0:通信模式启动1 1 1 在线F020 位置环前馈增益0 0 0 在线速度参数F033 速度环比例系数(低速)1500 1500 1500 在线F034 速度环积常数分时间(低速)1000 1000 1000 在线F035 速度环比例系数(高速)1200 1200 1200 在线F036 速度环积分时间常数(高速)550 550 550 在线F056 电流环比例系数600 600 600 在线F057 电流环积分系数200 200 200 在线位置参数F060指令脉冲输入的电子齿轮比:分子250 300 400 上电F061指令脉冲输入的电子齿轮比:分母9 10 10 上电F063 位置控制比例系数1(低速)100 55 100 在线F064 位置控制比例系数2(高速)180 55 180 在线F121内部速度给定(只在F001=0时使用)500 500 500 在线十三. 驱动器异常报警报警编码报警说明排除对策E001 电机运行过电流1.检查参数是否正确2.检查电机编码器线、动力线连接是否正常3.若仍无法解決,可能驱动器內部原件故障。