智能上下肢主被动训练器的应用原理
上下肢主被动训练操作方法及注意事项

上下肢主被动训练操作方法及注意事项When it comes to training the upper and lower limbs, it is important to understand the different methods and considerations involved in both active and passive exercises. Active training involves the individual voluntarily moving their own limbs, while passive training requires external assistance to move the limbs. Both types of training can be beneficial for strengthening muscles, improving range of motion, and enhancing overall functional abilities.在训练上下肢时,了解主被动训练的不同方法和注意事项是很重要的。
主动训练意味着个体自愿移动自己的肢体,而被动训练需要外部协助来移动肢体。
这两种训练方式都可以有效地加强肌肉、改善运动范围,并增强整体功能能力。
Active training for the upper limbs may involve exercises such as lifting weights, performing resistance band exercises, or engaging in activities that require repetitive arm movements. These exerciseshelp to build strength, increase endurance, and improve coordination in the upper body. It is important to start with lightweights and gradually increase the resistance to avoid injury and ensure proper muscle activation.对于上肢的主动训练可能包括举重、使用抗阻带进行练习,或参与需要重复手臂运动的活动。
上下肢主被动训练器
练功能,功能参数的设置必须根据患者的年龄、身高、身 体条件、术后健康状况以及患者总体健康情况等来调整.
产品使用注意事项与安全防范
5. 如果患者有骨质疏松症、肌肉短缺等(有 损伤肌腱、关节或者骨骼的危险) ,启动设 备之后,你可以根据需要调节电机的动力. 6. 请务必开始先进行被动训练 (让电机带动 四肢运动) ,进行热身活动. (如果你可以 主动训练,请先使用低的阻力,避免过度 训练 )。
3. 促进血液循环以及
肠蠕动;
XY-CPM-III型上下肢主被动训练器 的治疗目的
增强身体灵活性 加强肌肉剩余力量 增强康复信心 减少痉挛发生 促进新陈代谢,血液循环,改善消化功能 保持身体行动能力
XY-CPM-III型上下肢主被动训练器 的功能
痉挛控制器 该控制系统可持续感应使用者的肌肉张力, 自动探测可能发生的各种痉挛并加以处理, 当使用者发生痉挛时机器运转会逐渐变慢 之停止,然后向反方向运动,缓解痉挛, 放松肌肉,肌肉,关节不会有任何损伤, 在一定时间的使用后,可以减少患者痉挛 的发生。
上下肢主被动训练器
公司简介
安阳市翔宇医疗设备有限责任公司是一家集 研发、生产、销售康复理疗设备及创伤理疗设备 为一体的高科技公司,公司成立于2002年,现拥 有员工320余名,其中科研人员40余名,车间建筑 面积16600平方米。 我们公司致力健康事业,倡导诚信经营,注重 技术开发及良好的售后服务,赢得了用户的普遍 信赖。现在翔宇产品已被广泛应用于创伤及康复 理疗等的治疗过程中。并且已经出口到了越南、 俄罗斯、韩国、菲律宾等十多个国家和地区。
产品图片
XY-CPM-III型上下肢康复器 本机适用于那些由于现存的基础性 疾病(MS,中风)或事故后遗症 (如瘫痪)引起的运动受限。缺乏 运动的所有的健康障碍和循环障碍, 足胫冷,关节僵硬中可能是最主要 的原因之一。在这些情况下,电机 驱动的本机证明了其自身的卓越。
上下肢主被动训练系统产品技术要求广州傅利叶智能
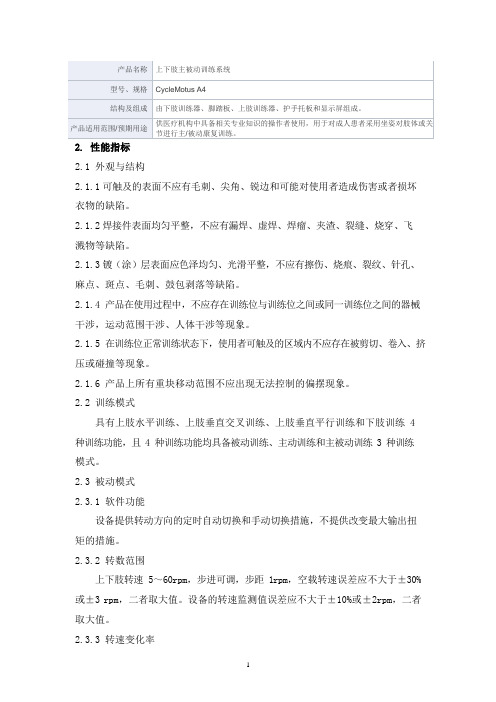
2.性能指标2.1外观与结构2.1.1可触及的表面不应有毛刺、尖角、锐边和可能对使用者造成伤害或者损坏衣物的缺陷。
2.1.2焊接件表面均匀平整,不应有漏焊、虚焊、焊瘤、夹渣、裂缝、烧穿、飞溅物等缺陷。
2.1.3镀(涂)层表面应色泽均匀、光滑平整,不应有擦伤、烧痕、裂纹、针孔、麻点、斑点、毛刺、鼓包剥落等缺陷。
2.1.4产品在使用过程中,不应存在训练位与训练位之间或同一训练位之间的器械干涉,运动范围干涉、人体干涉等现象。
2.1.5在训练位正常训练状态下,使用者可触及的区域内不应存在被剪切、卷入、挤压或碰撞等现象。
2.1.6产品上所有重块移动范围不应出现无法控制的偏摆现象。
2.2训练模式具有上肢水平训练、上肢垂直交叉训练、上肢垂直平行训练和下肢训练 4 种训练功能,且 4 种训练功能均具备被动训练、主动训练和主被动训练 3 种训练模式。
2.3被动模式2.3.1软件功能设备提供转动方向的定时自动切换和手动切换措施,不提供改变最大输出扭矩的措施。
2.3.2转数范围上下肢转速 5~60rpm,步进可调,步距 1rpm,空载转速误差应不大于±30% 或±3rpm,二者取大值。
设备的转速监测值误差应不大于±10%或±2rpm,二者取大值。
2.3.3转速变化率在被动训练时,转速变化率小于0.5r/s2。
2.4主动模式2.4.1阻力范围上下肢阻力设定范围为 0~20 档位,分 20 档位设定,设备提供阻力档位的相对显示。
2.4.2转速监测值设备提供转速监测值显示,其误差应不大于±10%或±2rpm,二者取大值。
2.4.3产品提供限制最大转速的措施。
2.5操作控制1)设备可根据患者运动状态自动切换主动模式和被动模式,自动切换前提供至少 2s 的切换提示,不提供定时自动切换的功能;2)主动模式和被动模式的指示在整个训练过程中连续显示;3)训练开始时默认为被动模式;4)训练启动前设定转速时,操作者必须做出附加的确认动作,才能将转速设定至 30r/min 或以上;5)上肢训练转速预置值应不大于 10r/min,下肢训练转速预置值应不大于15r/min;6)产品界面提供转动方向、转速、阻力、训练时间、肌力对称性信息,以图示方式显示;7)患者扶手和/或训练手柄的握持部分不提供带有可改变训练模式和运行参数(如转动方向、转速、阻力、痉挛等级、训练时间、换向时间﹑输出扭矩等)的控制装置;8)运行参数的设置值不提供仅通过一个动作就从最小变为最大;9)设备提供手动急停保护装置;10)设备不提供自动控制转速的被动模式;11)设备不提供有线连接的手持式控制器。
自制人工下肢被动活动器在膝关节置换术后功能锻炼中的应用价值分析
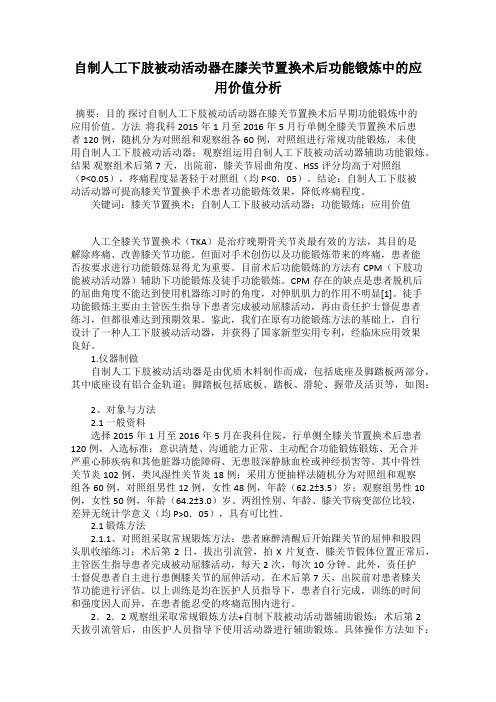
自制人工下肢被动活动器在膝关节置换术后功能锻炼中的应用价值分析摘要:目的探讨自制人工下肢被动活动器在膝关节置换术后早期功能锻炼中的应用价值。
方法将我科2015年1月至2016年5月行单侧全膝关节置换术后患者120例,随机分为对照组和观察组各60例,对照组进行常规功能锻炼,未使用自制人工下肢被动活动器;观察组运用自制人工下肢被动活动器辅助功能锻炼。
结果观察组术后第7天,出院前,膝关节屈曲角度、HSS评分均高于对照组(P<0.05),疼痛程度显著轻于对照组(均P<0.05)。
结论:自制人工下肢被动活动器可提高膝关节置换手术患者功能锻炼效果,降低疼痛程度。
关键词:膝关节置换术;自制人工下肢被动活动器;功能锻炼;应用价值人工全膝关节置换术(TKA)是治疗晚期骨关节炎最有效的方法,其目的是解除疼痛、改善膝关节功能。
但面对手术创伤以及功能锻炼带来的疼痛,患者能否按要求进行功能锻炼显得尤为重要。
目前术后功能锻炼的方法有CPM(下肢功能被动活动器)辅助下功能锻炼及徒手功能锻炼。
CPM存在的缺点是患者脱机后的屈曲角度不能达到使用机器练习时的角度,对伸肌肌力的作用不明显[1]。
徒手功能锻炼主要由主管医生指导下患者完成被动屈膝活动,再由责任护士督促患者练习,但都很难达到预期效果。
鉴此,我们在原有功能锻炼方法的基础上,自行设计了一种人工下肢被动活动器,并获得了国家新型实用专利,经临床应用效果良好。
1.仪器制做自制人工下肢被动活动器是由优质木料制作而成,包括底座及脚踏板两部分,其中底座设有铝合金轨道;脚踏板包括底板、踏板、滑轮、握带及活页等,如图:2、对象与方法2.1 一般资料选择2015年1月至2016年5月在我科住院,行单侧全膝关节置换术后患者120例,入选标准:意识清楚、沟通能力正常、主动配合功能锻炼锻炼、无合并严重心肺疾病和其他脏器功能障碍、无患肢深静脉血栓或神经损害等。
其中骨性关节炎102例,类风湿性关节炎18例;采用方便抽样法随机分为对照组和观察组各60例,对照组男性12例,女性48例,年龄(62.2±3.5)岁;观察组男性10例,女性50例,年龄(64.2±3.0)岁。
基于单片机的上下肢康复训练机器人
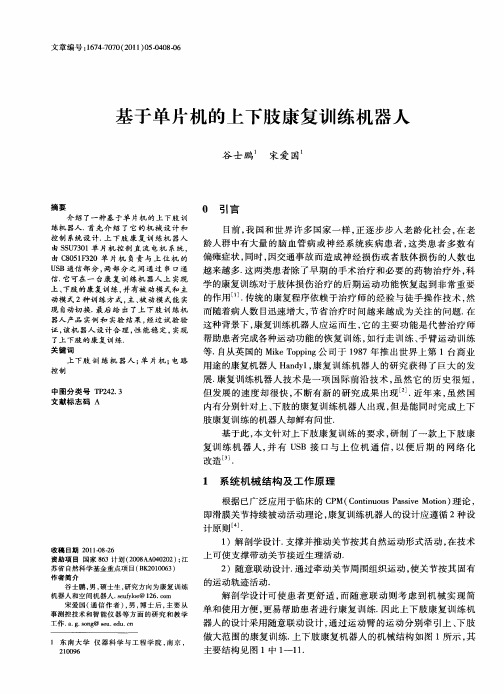
上可 使支 撑带 动关 节 接近 生理 活动 . 2 )随意 联动 设计 . 过牵 动关 节 周 围组 织 运动 , 关节 按 其 固有 通 使 的运 动轨 迹活 动 . 解 剖 学设 计可 使 患 者 更 舒 适 , 随 意 联 动 则 考 虑 到 机 械 实 现 简 而
上、 下肢的康复训 练 , 并有被 动模 式和主
动 模 式 2种 训 练 方 式 , 、 动 模 式 能 实 主 被
学的康复训练对于肢体损伤治疗 的后期 运动功能恢复起 到非常重要 的作用 … . 传统 的康 复程 序依 赖 于 治疗 师 的经 验 与徒 手 操 作 技 术 , 然
而随着 病人 数 目迅 速增 大 , 省 治疗 时 间越 来 越 成 为关 注 的问 题 . 节 在 这 种背 景 下 , 复训 练 机器 人 应 运 而生 , 的 主要 功 能 是代 替 治 疗 师 康 它 帮助患 者 完成 各种 运动 功 能 的恢 复 训 练 , 行 走训 练 、 如 手臂 运 动 训 练
上 下肢 训 练 机 器 人 ; 片机 ; 单 电路
控 制
中 图 分 类 号 T 22 3 P 4 . 文献 标 志 码 A
展. 康复训练机器人技术是 一项 国际前 沿技术 , 虽然它 的历史很 短 , 但 发 展 的 速 度却 很 快 , 断 有新 的研 究 成 果 出现 j近 年 来 , 然 国 不 . 虽
改 造 .
1 系统机械 结构 及工作原理
根据 已广 泛应 用 于临床 的 C M( o t uu as eMoi ) 论 , P C ni o s si t n 理 n P v o 即滑膜 关 节持 续被 动 活动理 论 , 复训 练机 器人 的设 计应 遵循 2种 设 康 计 原 则 J .
上下肢康复运动训练系统
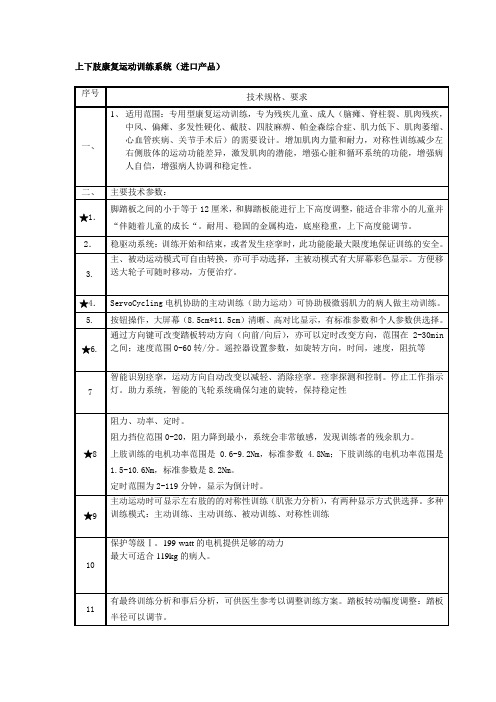
★9
主动运动时可显示左右肢的的对称性训练(肌张力分析),有两种显示方式供选择。多种训练模式:主动训练、主动训练、被动训练、对称性训练
10
保护等级Ⅰ。199-watt的电机提供足够的动力
最大可适合119kg的病人。
11
有最终训练分析和事后分析,可供医生参考以调整训练方案。踏板转动幅度调整:踏板半径可以调节。
配套的技术手册1套
6.
配套的电源线1根
四、
安装及验收:
1.
安装地点:舟山市残疾人康复指导中心;
2.
安装标准:符合我国国家有关技术规范和技术标准;
3.
安装完成时间:接用户通知7天内全部调试完成;
4.
验收标准:应与产品原始样本技术资料及标书技术文件一致,还应符合我国有关技术规范和技术标准;
五、
售后服务、培训及其它:
二、
主要技术参数:
★1.
脚踏板之间的小于等于12厘米,和脚踏板能进行上下高度调整,能适合非常小的儿童并“伴随着儿童的成长“。耐用、稳固的金属构造,底座稳重,上下高度能调节。
2.
稳驱动系统:训练开始和结束,或者发生痉挛时,此功能能最大限度地保证训练的安全。
3.
主、被动运动模式可自由转换,亦可手动选择,主被动模式有大屏幕彩色显示。方便移送大轮子可随时移动,方便治疗。
增加肌肉力量和耐力对称性训练减少左右侧肢体的运动功能差异激发肌肉的潜能增强心脏和循环系统的功能增强病人自信增强病人协调和稳定脚踏板之间的小于等于12厘米和脚踏板能进行上下高度调整能适合非常小的儿童并伴随着儿童的成长主被动运动模式可自由转换亦可手动选择主被动模式有大屏幕彩色显示
上下肢康复运动训练系统(进口产品)
cpm功能锻炼仪原理
cpm功能锻炼仪原理
CPM功能锻炼仪的原理是基于持续被动运动(CPM)理论,通过模拟人体自然运动,激发人的自然复原力,发挥组织代偿作用,进行下肢关节功能恢复训练的一种仪器。
它根据人体四肢的活动范围和特点,满足卧床病人术前、术后恢复期病员做上下四肢的伸直、屈曲、外展等全范围被动运动,是一种物理运动疗法。
CPM机器符合人体关节活动原理,同时可调整不同条件和微环境,模拟人体在康复中所需关节活动力量和工作幅度。
CPM比正常手法力量大、关节活动度大,同时属于持续活动状态,可在肢体康复和锻炼过程中不断进行调整和调节,以判断患者术后恢复情况。
CPM必须在医师指导下进行使用,属于根据受伤部位不同及所需关节活动范围、活动阶段不同并进行调整的机器,对于患者肢体功能康复和后期治疗,具有积极治疗意义和治疗价值。
主被动结合式全身外骨骼助力机器人

成本较高
目前全身外骨骼助力机器人的研 发和制造成本较高,限制了其广 泛应用和推广。
用户体验需要进一 步优化
虽然已经取得了一定的成果,但 还需要进一步优化用户体验,提 高用户的舒适度和满意度。
拓展应用领域
可以进一步拓展全身外骨骼助力 机器人在医疗、康复、助老助残 等领域的应用,提高其社会效益 和经济效益。
结果分析
通过对实验数据的分析,对比不同 设计参数、不同使用环境下的机器 人性能差异,找出优势与不足。
改进方向
根据实验结果的分析,提出针对性 的改进方向和建议,为后续的机器 人优化设计提供参考。
06
总结与展望
研究成果总结
高度集成
实现了全身外骨骼助力机器人的高度集成 ,提高了其便携性和可穿戴性。
适应性强
04
机器人软件设计
运动学建模与控制算法
运动学建模
通过建立准确的运动学模型,可以精确地描述机器人的位置、速度和加速度 等运动特性。
控制算法
采用先进的控制算法,如PID控制、模糊控制等,实现对机器人运动的精确控 制。
机器学习算法应用
特征提取
利用机器学习算法对机器人收集的数据进行特征提取,识别用户的意图和行为。
03
机器人硬件设计
机构设计
连杆机构
由刚性连杆组成,用于实现机 器人的运动模拟和助力。
关节设计
采用高精度舵机实现关节的精 确控制,同时保证机构的稳定
性。
轻量化设计
采用优化算法对机构进行轻量 化设计,减少机器人自重,提
高移动性能。
驱动器设计
电机驱动
采用无刷电机驱动,具有高效率、高转矩、高寿 命的特点。
意义
主被动结合式全身外骨骼助力机器人可以为老年人和残疾人 提供行走和负重的辅助,提高他们的自理能力和生活质量, 减轻社会负担。
德国智能上下肢主被动训练器

智能上下肢康复训练器招标参数
适用于对患者上肢和下肢进行主动性和被动性训练。
采用优质型钢,静电喷塑,ABS塑料1)可进行上下肢的训练,但上下肢训练是分开进行;
2)可进行主动训练和被动训练,且主、被动训练能自动切换;
3)可设定训练时间并实时显示剩余时间;
4)训练器于被动训练状态时可选择换向时间或选择不换向;
5)可设定和显示训练部位(上肢或下肢);
6)可调节和显示运动阻力级别;
7)可调节训练速度级别并显示训练速度;
8)具有痉挛保护功能并显示痉挛次数;
9)可设置运动方向进行正转和反转;
10)可统计和实时显示训练圈数;
11)可统计训练时间;
12)在电源中断恢复通电后能回复至初始状态;
13)基本功能由液晶显示操作屏控制。
技术参数:
1. 上肢/下肢训练速度:
上肢训练速度:12r/min~50r/min
下肢训练速度:12r/min~45r/min
2. 训练时间/min:1~60
3. 换向时间/min:0~9
4. 运动阻力:
分9级,1级最小,9级最大,逐级增大
5. 痉挛保护响应时间:≤5s
6. 上肢曲柄的扭矩范围:0~3N·m
7. 下肢曲柄的扭矩范围:0~10N·m
8. 上肢部份高度调节范围/cm:0~24
9. 上肢部份前后调节范围/cm:0~12
10. 外形尺寸(长×宽×高)/cm:
(67~79)×65×(106~130)
11. 输入功率:200VA
12. 熔断器:T1AL250VP。
下肢主被动康复训练器技术参数
下肢主被动康复训练器技术参数
一、设备名称:
1、名称:下肢主被动康复训练器
2、数量:一套
3、用途:用于治疗多发性硬化、中风/脑卒中、脑瘫、偏瘫、截瘫、帕金森氏综合症、阿尔茨海默病和其他神经损伤及运动损伤所致的疾病;
二、技术参数
*1、具有量化功能:整个训练过程可屏幕显示,显示屏的对比度可调范围0-20;可显示左右肢的的对称性训练(肌张力分析),有两种显示方式供选择
2、有四轮易于移动,固定,上下高度能调节。
有专用的床头固定装置,可针对卧床不起的患者
*3、有三种运动方式;被动、主动、助力,三种运动方式可以自由转换,也可以手动选择运动方式
4、平稳驱动系统
5、痉挛控制功能:可智能识别痉挛,并自动改变运动方向,从而减轻、消除痉挛
6、按钮操作:按键音量分三个档位:静音、低音、高音
7、训练参数可分标准参数和个人参数
8、训练模式有两种:普通模式和专家模式
9、普通模式下:踏板转动方向可调,可手动也可定时自动改变,范围2—30分钟之间,速度范围0—60转/分钟
10、最大速度:70-120转/分钟
11、阻力挡位范围0-12
12、电机动力范围0.6-9.2Nm
13、定时范围为0-120分钟
14、专家模式具有预设功能。
15、中文显示
16、电量消耗:待机状态 2.6瓦工作状态:40瓦
17、储存温度:-20℃—+60℃,工作温度:0℃—+40℃,相对湿度:10%-80%
18、质保≥3年
19、付款方式:货到安装验收合格后甲方支付90%货款,安装验收合格1年后无质量及其他问题,甲方再支付10%货款。
康复大厅设备规范操作流程2
康复大厅器械规范操作流程一、电动起立床适应症适用于中枢神经系统疾患或损伤所致的瘫患者(偏瘫、截瘫、脑瘫),长期卧床或长期使用轮椅需要辅助站立者,以及骨折术后恢复需要辅助站立患者。
操作流程1接通电源,将床体复位到0度水平位。
2用固定绑带将病人固定好,需要桌板的患者将桌板固定合适位置并将双手放于桌板上方。
3核对医嘱,按“上升键”开始升高床体,床体上升到核定的角度,开始治疗。
4上升的过程中可随时松开按钮,床体停止上升,再次按“上升键”可让床体继续上升,或按“下降键”降低床体,根据医生设定的角度调整。
4治疗时间结束,按“下降键”使床体回复到水平位,休息三分钟后协助病人转移到轮椅上。
注意事项1治疗过程中询问患者有无头晕、恶心、心率下降等不良反应。
2上下设备一律由治疗师亲自协助患者并固定患者,叮嘱患者及其家属不得私自调解角度。
3初次治疗角度不宜过大,一般不超过45度,时间少于20分钟。
4无人看护下请勿用维护保养1、每天下班前关闭电源,起立床床面、绑带进行清洁消毒。
2、每周四检查设备有无损坏,电源接口有无松动,能否正常运行。
每月对器材经常活动部位上一次润滑油,减少器材磨损。
3、不得超载使用。
禁忌症1、发热在38度以上患者2、有低血压休克危险的患者3、双下肢关节严重变形者4、下肢有扭伤、挫伤或骨折未愈合者5、有严重心脏病史、心衰和血压不稳者二、上下肢主被动智能训练系统适用对象适用于脑卒中、帕金森、周围神经损伤、脊髓损伤、四肢骨折术后恢复期患者进行肌力、肌耐力、关节活动度、步行能力等功能训练。
操作流程1训练前检查设备电源、导线有无故障和损坏,螺丝有无松动。
2接通电源,打开开关,患者座椅和设备保持合适距离,轮椅患者训练前务必用刹车将轮子卡住,双上肢或双下肢固定于设备上。
3根据处方,设置参数,包括运动模式、治疗时间、速度、阻力、运动方向。
4按启动键开始治疗,治疗过程中如需在调节参数或者终止治疗,先按暂停键,然后在另行操作。
上下肢主被动康复器的设计及人机工程学研究
@
太原理工大学硕士研究生学位论文
上下肢主被动康复器的设计及人机工程学研究
摘要
由各种突发事故和人类无法抗拒的自然灾害如地震等产生了大量的伤 残人员,以及由于人类疾病如脑损伤、脊髓损伤、中风、神经损伤等也会 导致大量伤残人士,同时, 我国人口老龄化进程正在加快,老年人的越多, 产生的肢体功能问题也就越多。这些伤残疾病给患者的生活带来极大的痛 苦和不便。随着社会的发展,人们物质和精神生活水平的不断提高,伤残 患者对自身肢体功能恢复的愿望已经越来越高,他们也都希望能尽早恢复 生活能力,因此对肢体功能康复的需求就更加迫切。
社会越发展、经济越发达,要求的精神文明程度越高,患有疾患或残障人士要想使 他们不成为家庭和社会的负担,对于身体机能的恢复的愿望越来越强烈。国务院办公厅 转发了卫生部等部门确定了今后一个时期残疾人康复工作的总体目标和指导方针,并颁 布了《关于进一步加强残疾人康复工作的意见》。该《意见》明确到 2015 年实现残疾人 “人人享有康复服务”,极大地推动了残疾人康复工作的整体进程。针对我国残疾人众 多而人性化康复医疗装备非常匮乏的严峻现实,2008 年 3 月 28 日胡锦涛总书记专门 主持了中共中央政治局会议对促进残疾人事业发展做出部署:促进残疾人事业发展,改 善残疾人状况,已成为全面建设小康社会和构建社会主义和谐社会的一项重要而紧迫的 任务[3]。康复的需求就越大,康复医学事业也越发达,这也将成为历史的必然。只有采 取积极的康复措施,才能使他们恢复功能、生活自理,甚至重返社会,继续有所作为, 奉献社会。伴随着技术的进步,对康复训器具的研究也进入急需的阶段。
上下肢主被动训练系统产品技术要求广州傅利叶智能
2.性能指标2.1外观与结构2.1.1可触及的表面不应有毛刺、尖角、锐边和可能对使用者造成伤害或者损坏衣物的缺陷。
2.1.2焊接件表面均匀平整,不应有漏焊、虚焊、焊瘤、夹渣、裂缝、烧穿、飞溅物等缺陷。
2.1.3镀(涂)层表面应色泽均匀、光滑平整,不应有擦伤、烧痕、裂纹、针孔、麻点、斑点、毛刺、鼓包剥落等缺陷。
2.1.4产品在使用过程中,不应存在训练位与训练位之间或同一训练位之间的器械干涉,运动范围干涉、人体干涉等现象。
2.1.5在训练位正常训练状态下,使用者可触及的区域内不应存在被剪切、卷入、挤压或碰撞等现象。
2.1.6产品上所有重块移动范围不应出现无法控制的偏摆现象。
2.2训练模式具有上肢水平训练、上肢垂直交叉训练、上肢垂直平行训练和下肢训练 4 种训练功能,且 4 种训练功能均具备被动训练、主动训练和主被动训练 3 种训练模式。
2.3被动模式2.3.1软件功能设备提供转动方向的定时自动切换和手动切换措施,不提供改变最大输出扭矩的措施。
2.3.2转数范围上下肢转速 5~60rpm,步进可调,步距 1rpm,空载转速误差应不大于±30% 或±3rpm,二者取大值。
设备的转速监测值误差应不大于±10%或±2rpm,二者取大值。
2.3.3转速变化率在被动训练时,转速变化率小于0.5r/s2。
2.4主动模式2.4.1阻力范围上下肢阻力设定范围为 0~20 档位,分 20 档位设定,设备提供阻力档位的相对显示。
2.4.2转速监测值设备提供转速监测值显示,其误差应不大于±10%或±2rpm,二者取大值。
2.4.3产品提供限制最大转速的措施。
2.5操作控制1)设备可根据患者运动状态自动切换主动模式和被动模式,自动切换前提供至少 2s 的切换提示,不提供定时自动切换的功能;2)主动模式和被动模式的指示在整个训练过程中连续显示;3)训练开始时默认为被动模式;4)训练启动前设定转速时,操作者必须做出附加的确认动作,才能将转速设定至 30r/min 或以上;5)上肢训练转速预置值应不大于 10r/min,下肢训练转速预置值应不大于15r/min;6)产品界面提供转动方向、转速、阻力、训练时间、肌力对称性信息,以图示方式显示;7)患者扶手和/或训练手柄的握持部分不提供带有可改变训练模式和运行参数(如转动方向、转速、阻力、痉挛等级、训练时间、换向时间﹑输出扭矩等)的控制装置;8)运行参数的设置值不提供仅通过一个动作就从最小变为最大;9)设备提供手动急停保护装置;10)设备不提供自动控制转速的被动模式;11)设备不提供有线连接的手持式控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能上下肢主被动训练器
产品介绍:上下肢主被动训练器是通过电机带动患者四肢进行主被动训练,通过正确的运动模式刺激肌肉运动,刺激神经组织,改善患肢血液循环,促进新陈代谢,增加关节活动度,促进四肢功能的恢复
产品优势:上下肢主被动可以给老年人和需要康复的病人提供上肢
和下肢的康复训练
双向的被动运动可以给缺乏力量,协调能力,心肺功能不好或者是骨骼训练范围受限制的病人进行训练。
彩色触摸屏显示可以提供生物反馈信息
电视功能为病人在训练过程中可以娱乐
内有痉挛评测模式
声音提示设备的启动,停止和痉挛控制
治疗目的:1、增加关节的活动度。
2.减少痉挛。
3.保持或恢复行走的能力。
4.促进新陈代谢,血液循环以及肠蠕动,防止深静脉血栓发生和泌尿系感染。
5.使肢体变得更暖和。
6.对下肢/四肢进行对称性训练。
7.增强康复的信心。
适应症:四肢痉挛、脑卒中偏瘫、关节多样性硬化、截瘫、下肢发冷麻痹、四肢瘫痪、四肢发冷麻痹、脑瘫、肌肉萎缩脑部损伤、帕金森氏综合症、神经紊乱、骨质疏松症、术后和长期卧床引起的并发症
禁忌症:1、下肢肿瘤、结核,有出血倾向等。
2、临床生命体征不稳定者,严重心肺功能障碍。
3、骨关节感染,骨折内固定不稳定及临床上身体需要止动者。
4、足部有皮肤破损者5、医生认为不合适做康复踏车的疾病。
更多尽在:HTTP:
相关搜索:上下肢主被动训练器上下肢主被动训练仪上下肢主被动。